超声相控阵检测参数对焊缝缺陷分辨率研究
2021-06-05刘文婧郑贵志王海岭王建国
刘文婧,郑贵志,王海岭,王建国
(1.内蒙古科技大学机械工程学院,内蒙古自治区机电系统智能诊断与控制重点实验室,内蒙古 包头 014010;2.内蒙古科技大学矿业研究院,内蒙古 包头 014010;3.内蒙古北方重工业集团有限公司,计量理化研究院,内蒙古 包头 014010)
1 引言
超声相控阵检测目的为了有最优成像分辨率,成像分辨率与检测工艺参数密切相关。其中包括声束发射窗口、聚焦深度、检测波形、声束步进数及聚焦方式等。若参数选取不当,不仅影响声场能量而且会影响缺陷的成像质量,造成缺陷成像模糊分辨率低和伪像等结果,引起缺陷检测人员的误判[1-2]。文献[3]基于声场指向型理论,研究检测参数不同对声压指向型的影响,得出孔径、聚焦深度、脉冲宽度与最大回波幅值与闸门高度差之间的关系。但没有突出检测参数的不同对成像质量影响。文献[4]通过实验进行了孔径以及聚焦深度对横向分辨率的影响,得到随检测工艺参数的改变缺陷成像分辨率变化的影响规律。但仿真试验次数过少,讨论不够全面。
综上所述,基于CIVA 仿真软件,进行试块建模分析,并结合物理试验验证模型适用型,仿真探头频率、晶片数量、焦距检测参数对波峰与波谷幅值差影响,结合仿真检测数据,运用响应面法判断各检测参数之间的耦合对缺陷成像分辨率影响大小,根据最优成像分辨率得到优化后的探头频率、晶片数量、焦距的大小。
2 基本原理
2.1 超声相控阵横向分辨率检测原理
水平分辨力即横向分辨力,指的是相同深度,能清楚显示相邻两缺陷之间的最小距离(mm)。清楚显示,指的是两缺陷产生的回波,沿波峰顶点到波谷谷底,波幅的落差值最少6dB,如图1(a)所示。评测水平分辨力时,探头进行移动。根据相同深度相邻两缺陷的排列方向,即探头移动的方向,如图1(b)所示;水平分辨力又分Y向(从动窗平行方向)水平分辨力和X 向(主动窗平行方向)水平分辨力。两种水平分辨力测评值,相关于Y向声束宽度和X向声束宽度。两种分辨力均用探头移动时的回波动态法进行测评[5]。
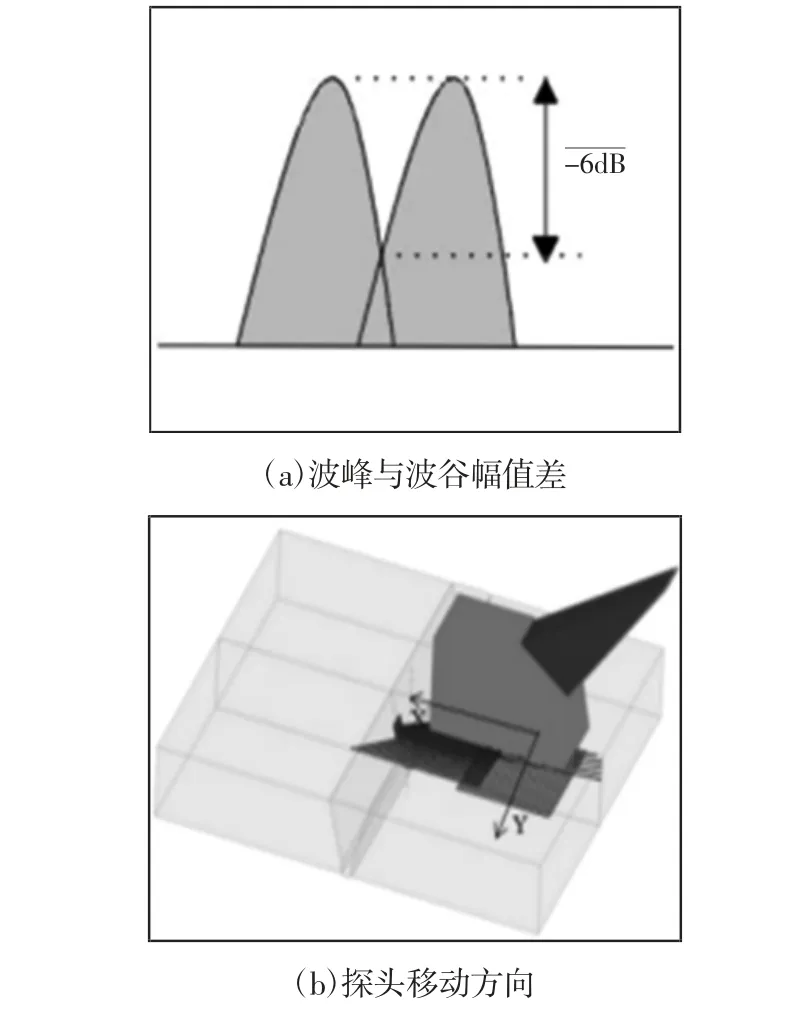
图1 相邻缺陷的横向分辨率图Fig.1 Lateral Resolution of Adjacent Defects
3 超声相控阵检测工艺仿真
3.1 波形选择
由于实际检测时在楔块和工件之间存在耦合剂,反射的横波和纵波能量很小,可以忽略。超声相控阵检测时在工件中会产生两种波形:横波和纵波。当声束入射到试块中碰到缺陷或底面会发生波形转换,产生的纵波和横波会分别进行成像,影响最终的成像质量。纵波发生全反射时的折射角为:

用CIVA 软件进行声场仿真,如图2(a)所示。声束偏转为0°,如图2(b)所示。声束偏转为25°,如图2(c)所示;声束偏转35°。
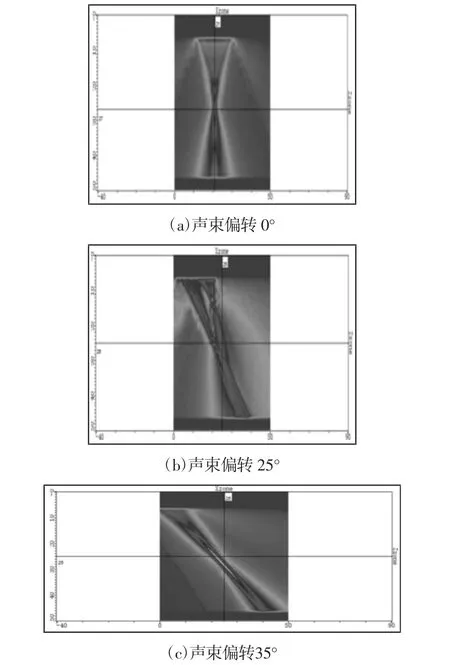
图2 声束偏转角度仿真Fig.2 Simulation of Deflection Angle of Acoustic Beam
3.2 仿真模型的验证
3.2.1 模型仿真试验设计
综合考虑异型焊缝结构内部检测声束传播复杂,散射衰减大,缺陷成像模糊等特点[6-8]。采用Olympus 线阵探头及Olympus-SW55 SA11-N55S 楔块。
试块为异型结构钢材,如图3(a)所示。采用手工电弧法焊接单V 型坡口的角接焊缝,两个钢块之间的角接角度为150°。焊缝底部余高为0.3mm,缺陷为距坡口面2mm 直径1mm 的横通孔。探头检测频率为5MHz,晶片数量为32,晶片中心局为0.6mm,阵元间距为0.1mm,探头孔径为19.1mm。楔块参数为:入射角为36°楔块高度为26mm,长度42mm,宽度20mm,材料为玻璃。声束在楔块内入射速度为2330m/s。
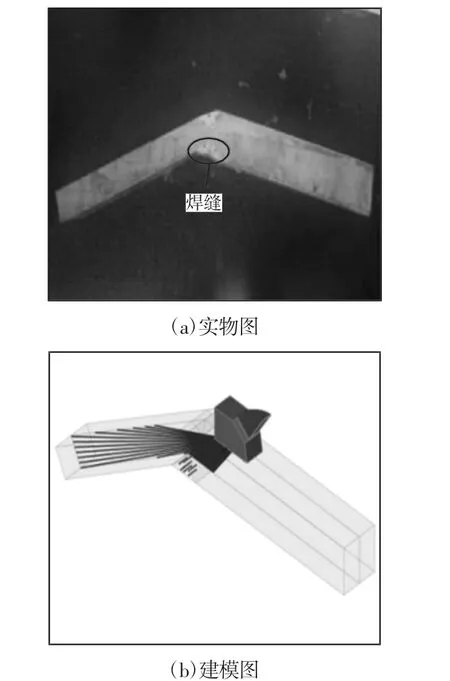
图3 仿真建模图Fig.3 Simulation Modeling Diagram
试块模型的模型仿真检测设置等深度聚焦为40mm,扇形扫查范围为(35~70)°,接收法则与发射法则相同。缺陷:根据模型设置7 个直径1mm 长度为10mm 的横孔。仿真模型参数设置完成,如图3(b)所示。最后计算聚焦法则,然后运行。
3.2.2 仿真模型可靠型验证
试验设备采用M2M 公司便携式超声相控阵检测仪,设置参数同仿真试验参数,如图4 所示。

图4 便携式超声相控阵检测仪Fig.4 Portable Ultrasonic Phased Array Detector
通过仿真扇扫图和试验扇扫图进行对比,以1 号和2 号缺陷为例,如图6(a)所示。仿真图中1 号缺和2 号陷声束回波最大值处的检测深度分别为37.66mm,32.83mm 扫查的声束角度分别为:47°,51°,如图6(b)所示。通过试验扇扫图分析得到1 号和2号缺陷回波最大幅值处检测的深度分别为37.12mm,32.29mm。声束扫查角度分别 为:48°,51°,如图5(a)所示。1 号和2 号在C扫图中根据-6dB 法缺陷定长为:9.09mm,8.85mm,如图5(b)所示。试验结果分析缺陷1、2 缺陷定量长度分别为:9.21mm,9.02mm。经分析,仿真的结果跟试验结果比较发现缺陷在长度、角度及位置方面差别小,证明建立的模型适用型及可靠型高。

图5 缺陷C 扫成像图Fig.5 Defect C-Scan Image
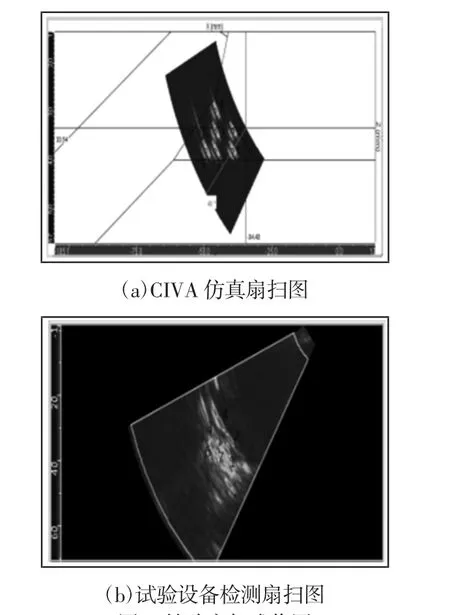
图6 缺陷扇扫成像图Fig.6 Defect S-Scan Image
4 基于响应面法的检测参数优化
4.1 BBD 试验设计与分析
采用Box-Behnken 设计方法,对波峰与波谷幅值差中影响的关键因素作研究和分析,以获得最优分辨率和检测工艺参数[9]。将3 个因素,即探头中心频率、焦距、晶片数量三因素编号分别记为A,B,C,设置每个自变量的高、中、低编码水平为1、0、-1,进行编程设计。以波峰与波谷间的幅值差作为响应值,记为变量Y。三因素编码水平,如表1 所示。
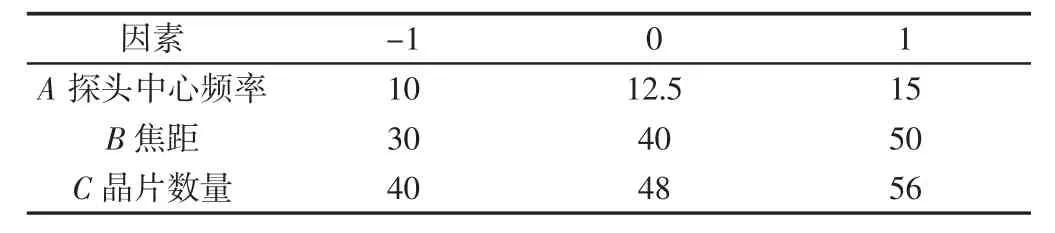
表1 横向分辨率条件优化Box-Behnken 试验因素与水平Tab.1 Optimized Box Behnken Test Factors and Levels for Horizontal Resolution Conditions
将试验数据运用到Design-Expert 软件中,如表2 所示。采用软件进行分析、拟合得到三元二次多项式拟合回归方程:
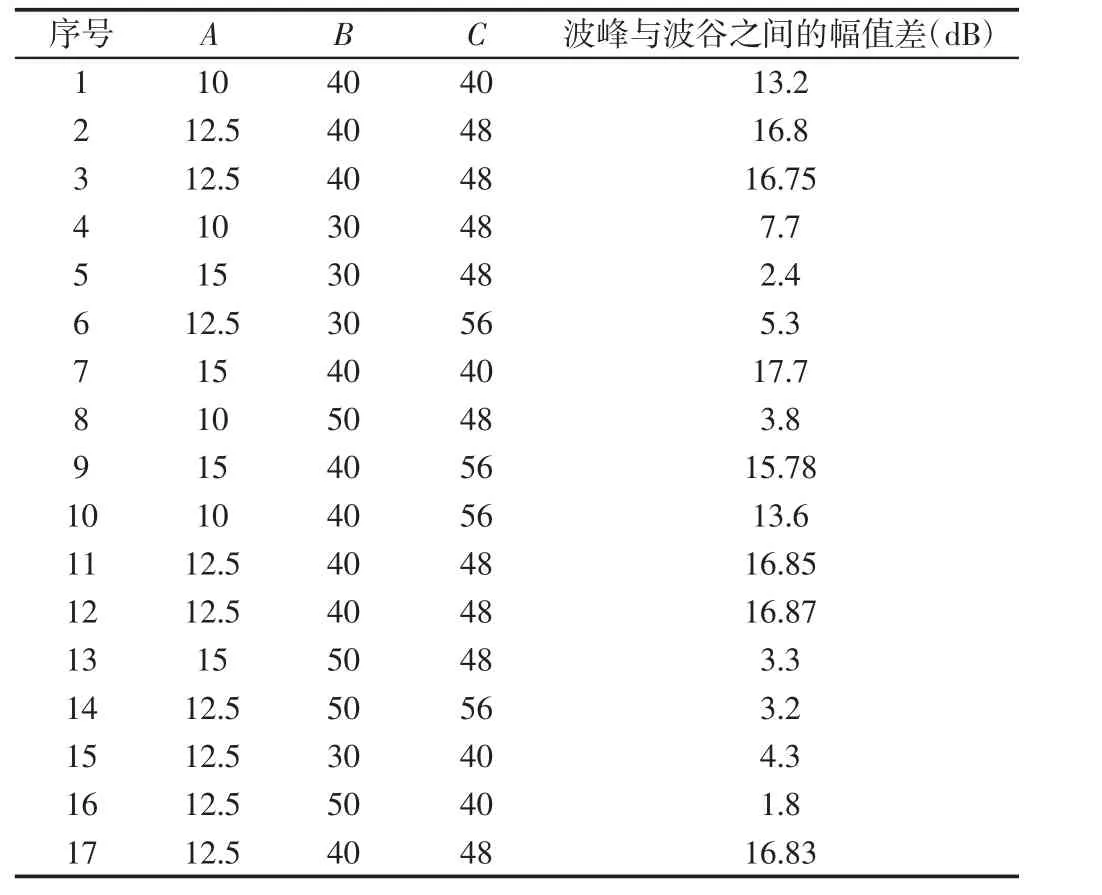
表2 BBD 试验设计方案和试验结果Tab.2 BBD Test Design Scheme and Test Results
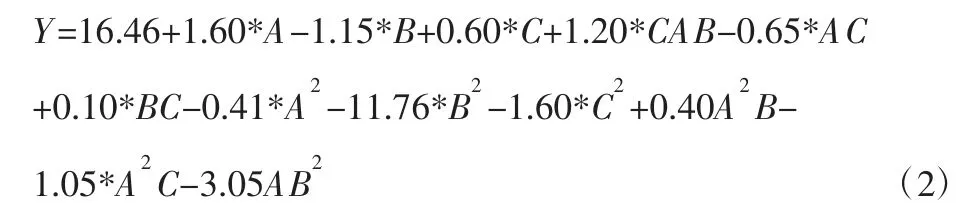
式中:Y—波峰与波谷幅值差;A—探头频率;B—焦距,C—晶片数量。
对上述试验数据进行方差分析,分析结果,如表3 所示。
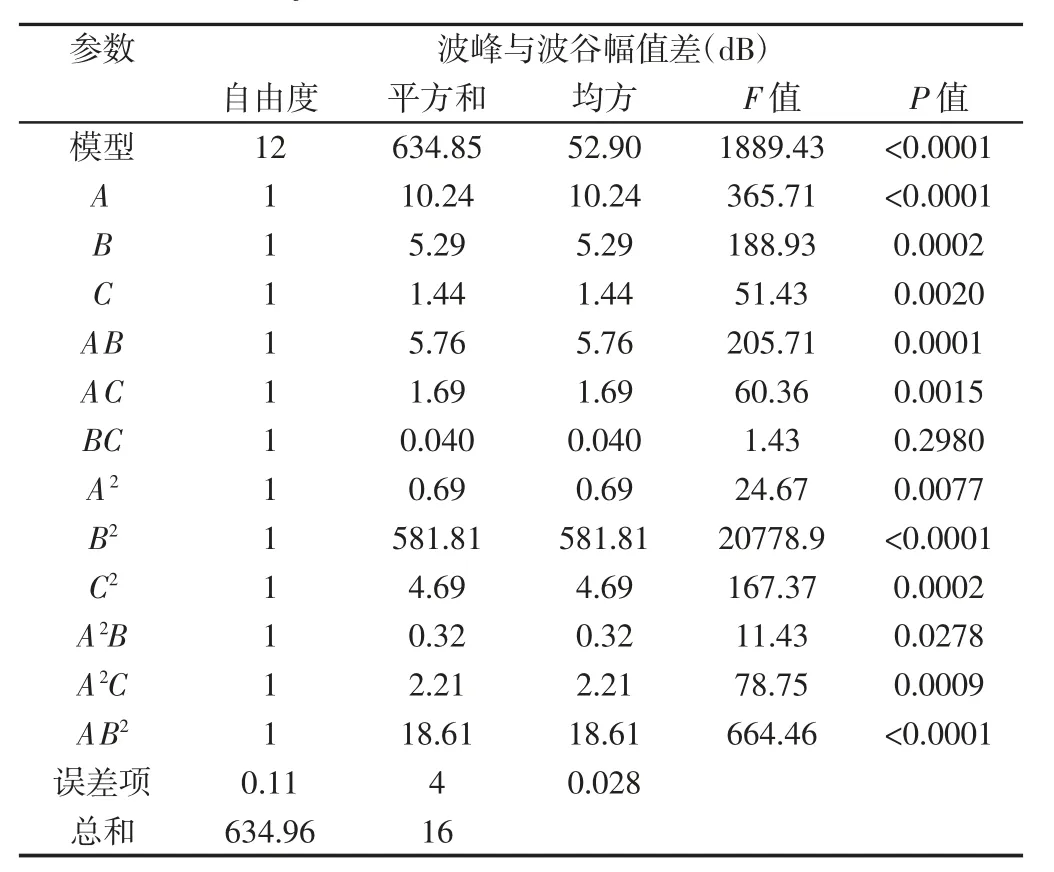
表3 BBD 试验结果方差分析表Tab.3 Analysis of Variance of BBD Test Results
当P 值小于0.05 时,可以说明达到显著水平,当P 值小于0.0001 时,说明达到极显著水平。由BBD 试验数据方差分析表3直接得到,考察指标波峰与波谷幅值差的拟合回归方程P<0.0001,说明该模型达到极显著水平,拟合程度高。三个因素A,B,C 对考察目标波峰与波谷幅值差的影响大小关系为探头中心频率>焦距>晶片数量。
因素A 的P<0.0001,说明,因素A 探头中心频率对波峰与波谷幅值差的影响作用为极显著,交互项AB2的P<0.0001,说明对波峰与波谷幅值差的影响极显著。交互项BC 的P 值为0.298,说明了这两个因素的交叉影响对波峰与波谷幅值差的影响显著型较弱。三因素对波峰波谷幅值差的影响不是单独作用,而是存在着耦合影响作用。
4.2 优化结果
根据上图7 分析,可以看出,随着各项因素值增大,波峰与波谷的幅值差也在同时增大。但是增大到一定程度时,随着各项因素值继续增大,波峰与波谷的幅值差开始逐渐减小,因此说明在三个因素共同作用下,存在一个最佳状态,即波峰与波谷的幅值差值最大。由图可知,当晶片数量固定时,随着探头中心频率和焦距的增大,波峰与波谷的幅值差呈现先增加后降低的趋势,最优点处落在探头频率为15MHz 和焦距为(38.3~42.5)mm 的范围;当固定焦距时,随着探头中心频率和激发晶片数量的增大,波峰与波谷幅值差呈现先持续降低的趋势,此时当探头中心频率为15MHz 和晶片数量为40 时波峰与波谷幅值差有最大值;当探头中心频率一定时,随着晶片数量和焦距的增大,波峰与波谷幅值差呈现先增加后降低的趋势,波峰与波谷幅值差的最优值范围落在,焦距(37.6~43.4)mm,晶片数量在(47.56~49.83)。上述分析和表3 中的显著型一致。

图7 探头中心频率、焦距、晶片数量对波峰与波谷幅值差的响应面图Fig.7 Response Surface of Probe Center Frequency Focal Length and Wafer Quantity to Peak and Valley Amplitude Difference
4.3 仿真验证优化结果
利用Design Expert 10.04 软件对所得的回归方程进行逐步回归[10]。确定最佳工艺参数为探头中心频率为15MHz、焦距为40.129mm、晶片数量为43.838,如图8 所示。此时,波峰与波谷间幅值差预测值为17.944dB。为了验证模型预测的可靠型和准确型,考虑到实际情况,将最佳工艺参数修订为探头频率15MHz,焦距为40mm,晶片数量为44,如图9 所示。在此最优条件下,波峰与波谷间的幅值差为17.8dB,与模型预测值(17.944dB)较一致,验证了模型的可靠型。

图8 三因素对波峰与波谷幅值差的耦合响应图Fig.8 Coupling Response of Three Factors to Amplitude Difference of Wave Crest and Wave Trough
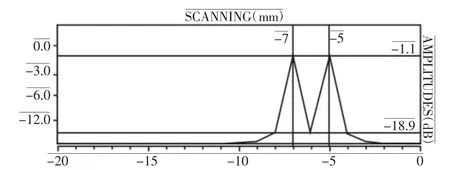
图9 优化后仿真图Fig.9 Simulation After Optimization
5 结论
仿真试验采用带楔块的36°斜探头,试验扇扫角度选择在(35~70)°步进值为1mm。聚焦面为平面,聚焦方式为等深度聚焦。采用手工电弧法焊接单V 型坡口的角接焊缝,两个钢块之间的角接角度为150°,焊缝底部余高为0.3mm。缺陷为俩个距底面2mm 横向间隔2mm 直径1mm 的横通孔。(1)声束传播时在楔块与试块的耦合面发生波形转换,当检测声束入射角度大于33.19°纵波发生全反射。(2)仿真试验和物理实验的进行对比,从缺陷的成像的位置信息和定量分析证明试块模型的适用型和可靠型。(3)通过响应面法分析得出当波峰与波谷幅值差为17.944dB,即有缺陷成像有最有分辨率时,优化后的探头频率为15MHz,晶片数量为44,焦距为40mm。
