永磁同步电机模型预测转矩控制简化备选电压矢量集合研究
2020-09-10李耀华秦玉贵杨启东任佳越
李耀华,秦玉贵,杨启东,任佳越,秦 辉
(长安大学 汽车学院,西安 710064)
0 引 言
有限控制集模型预测转矩控制(Finite Control Set-model Predictive Torque Control,FCS-MPTC) 基于系统预测模型,遍历所有施加变量计算系统未来特性,以成本函数作为评价指标选择最优变量。近年来,在永磁同步电机控制领域得到重视[1-9]。
对于两电平电压源逆变器所有可能的开关状态有8种,可产生7个电压矢量。因此,模型预测转矩控制系统需要在一个控制周期内完成7次预测运算和遍历寻优,对系统的实时性要求较高,有必要简化备选电压矢量集合的数量来减少计算负担,同时不过多牺牲系统的控制性能。目前对备选电压矢量集合的研究大多集中于通过空间矢量调制技术增加可用电压矢量来提升系统性能[10-16]。但电压矢量数目的增加势必增加系统的计算负担。文献[17]从减少开关次数角度出发减小备选电压矢量数目,但并未考虑对系统控制性能的影响。因此,在保持系统控制性能基本相当的前提下,减小备选电压矢量数目以提高模型预测转矩控制实时性是本文研究重点。
本文基于模型预测转矩控制对基本电压矢量的利用率,提出了两种备选电压矢量集合简化方法。方法一在一个定子磁链扇区内只使用5个基本电压矢量,从而将一个控制周期内的7次预测运算减少至5次。方法二采用以转矩角和定子磁链位置为输入,备选电压矢量为输出的模糊控制器对备选电压矢量集合进行简化。仿真结果表明:两种方法的磁链和转矩控制效果与传统模型预测转矩控制基本相当。模糊控制备选电压矢量集合在转矩较小时偏向使用7个基本电压矢量,使得控制性能与传统模型预测转矩控制基本相当,在转矩较大时偏向使用5个基本电压矢量,提高系统实时性。
1 传统模型预测转矩控制系统
(1)

(2)

两电平电压源逆变器可产生6个非零电压矢量V1~V6和1个零电压矢量V0,其中零电压矢量可以由两个开关状态生成。传统模型预测转矩控制备选电压矢量采用全部7个基本电压矢量为
(3)
成本函数是模型预测转矩控制选择电压矢量的唯一标准。综合考虑磁链控制和转矩控制,定义成本函数g为
(4)


图1 模型预测转矩控制流程图
模型预测转矩控制系统将如式(3)所示的7个电压矢量代入式(1)和式(2),遍历计算可得到施加不同电压矢量后,下一时刻定子磁链幅值和转矩的预测值,再将其代入至式(4),则可得到7个不同的成本函数值,并选取成本函数最小值所对应的电压矢量作为下一时刻最终施加的电压矢量。零电压矢量具体对应的开关状态以开关次数最小原则确定[21-22]。模型预测转矩控制流程图如图1所示。
基于Matlab/Simulink建立了表面式永磁同步电机模型预测转矩控制仿真模型。仿真模型为离散模型,采样周期为5×10-5s。直流母线电压为312V。转速PI调节器参数为:KP=5,KI=10,PI调节器输出上下限为[-35,35]。参考转速为60 r/min,负载转矩为25 Nm。参考定子磁链幅值为0.3Wb。仿真总时长为2s。仿真用表面式永磁同步电机参数如表1所示。电机转矩与磁链轨迹如图2和图3所示。仿真结果表明:使用7个电压矢量作为备选电压矢量的传统模型转矩控制系统控制性能良好。
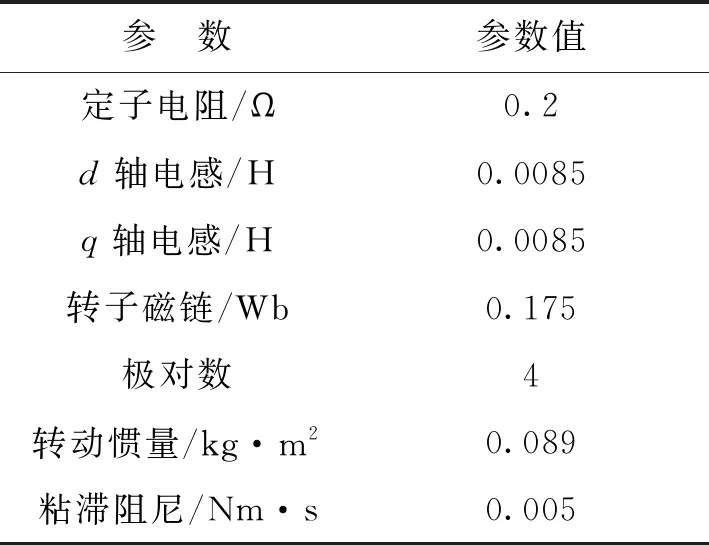
表1 仿真用表面式永磁同步电机参数
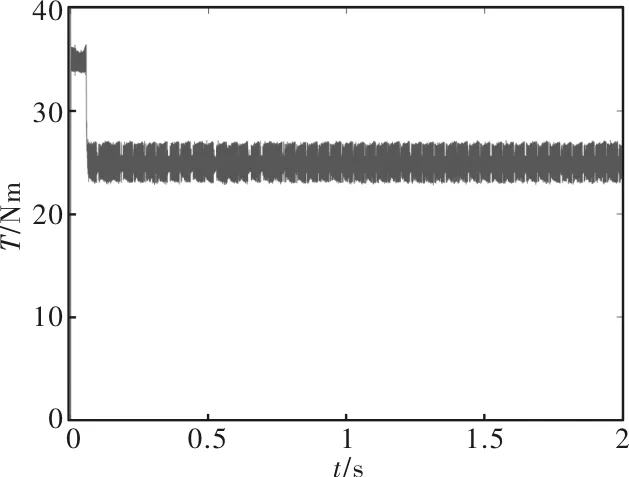
图2 电机转矩
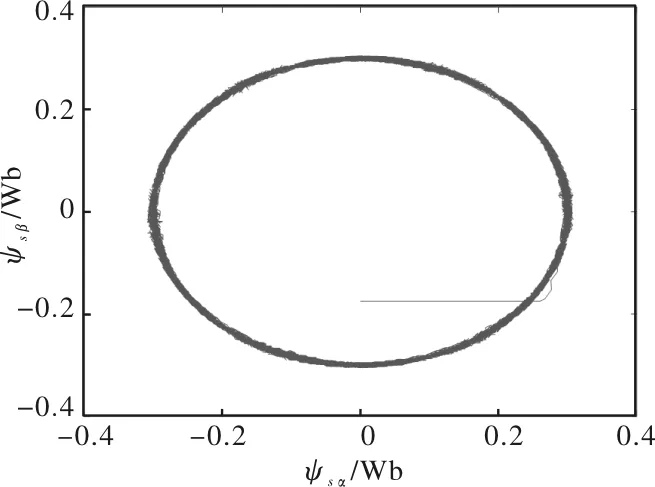
图3 定子磁链轨迹
2 基于模糊控制简化有限控制集合
定义电压矢量利用率如式(5)所示,其中N为某时间段内模型预测转矩控制施加电压矢量的总次数,Ni为具体施加某个电压矢量的总次数。
(5)
在上述仿真条件下,7个电压矢量的利用率如表2所示。

表2 电压矢量利用率/%
由表2可知,模型预测控制对7个备选电压矢量的利用并不均衡。
在不同定子磁链扇区,电压矢量V0-V6的利用率如表3所示。
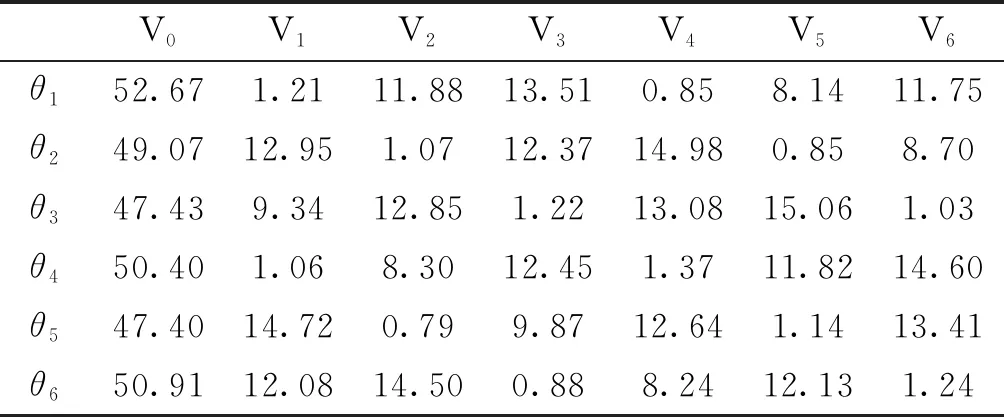
表3 电压矢量利用率/%
表3表明:定子磁链扇区对电压矢量利用率产生影响。使用率较高的电压矢量为零电压矢量和直接转矩控制开关表选择的4个非零电压矢量。因此,可将不同扇区内的备选电压矢量集合简化为表3中利用率较高的5个电压矢量,从而将一个控制周期内的7次预测运算减少至5次。以定子磁链位于扇区θ1为例,此时备选电压矢量集合为{V0,V2,V3,V5,V6}。此可递推得到其他定子磁链扇区。本文定义为一般简化备选电压矢量集合。
研究进一步表明:转矩角对电压矢量利用率也有影响。以定子磁链扇区θ1为例,不同转矩角下,电压矢量V0~V6在定子磁链扇区θ1内的利用率如表4所示。
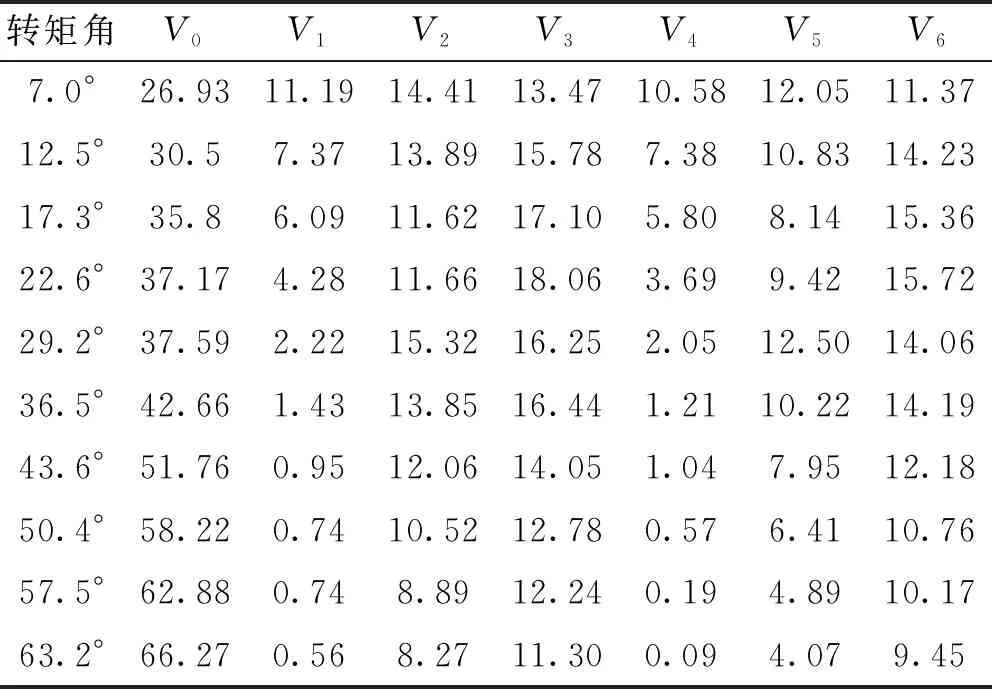
表4 电压矢量利用率/%
表4表明:在θ1扇区,当转矩角较小时,7个基本电压矢量的利用率均较高;当转矩角较大时,电压矢量V0,V2,V3,V5,V6的利用率较高。由此可递推得到其他定子磁链扇区。
由表2~表4可知:模型预测转矩控制对电压矢量利用并不均衡。定子磁链角位置和转矩角对电压矢量的利用率都有影响。因此,下文提出基于模糊控制简化备选电压矢量集合的控制策略。模糊控制器的输入为定子磁链角位置和转矩角,输出为备选电压矢量集合。
定子磁链所在扇区信号θ论域为[-π,π],分为6个模糊子集{θ1,θ2,θ3,θ4,θ5,θ6},隶属度函数如图3所示,其中μθ为定子磁链扇区信号隶属度。
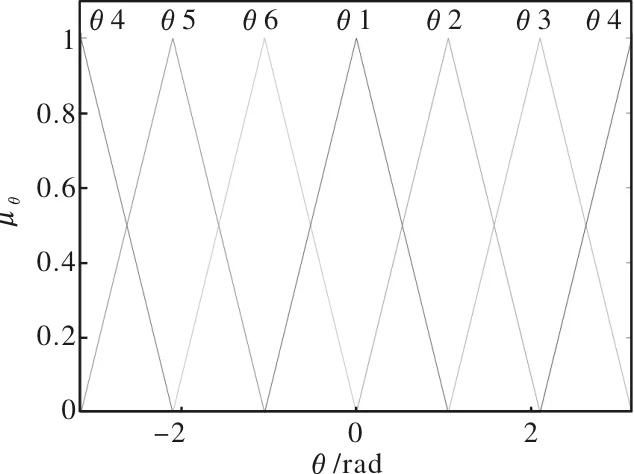
图4 定子磁链扇区信号隶属度函数
转矩角δ论域在[-90°,90°],分为3个模糊子集{NB,ZO,PB},隶属度函数如图5所示,其中μδ为转矩角隶属度。
输出电压矢量V论域为[0,6],分为7个模糊子集{V0,V1,V2,V3,V4,V5,V6},隶属度函数如图6所示,其中μV为输出电压矢量隶属度。
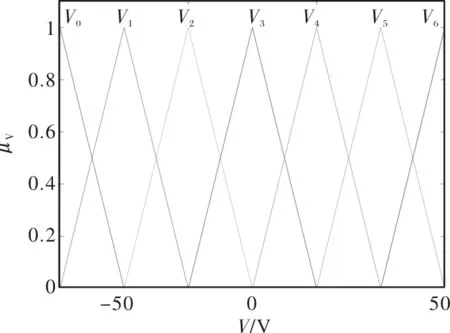
图6 输出电压矢量隶属度函数
基于定子磁链角位置和转矩角对电压矢量利用率的影响规律,可得出模糊控制规则表如表5所示,其中模糊推理采用Mamdani型推理法,解模糊采用最大隶属度法。由表5可知,此时模型预测控制的备选电压矢量数目是动态变化的。当转矩角较小时,模糊控制器输出偏向输出7个备选电压矢量,与传统模型预测控制相同;当转矩角较大时,模糊控制器输出偏向输出5个电压矢量,与一般简化备选电压矢量集合相同。

表5 模糊控制规则表
基于模糊控制简化备选电压矢量集合的永磁同步电机模型预测转矩控制系统如图7所示。

图7 基于模糊控制简化备选电压矢量集合的永磁同步电机模型预测转矩控制系统
3 仿真验证
基于上文仿真模型,设置仿真条件如下:参考转速为60 r/min。参考转矩初始为5 Nm,2s时阶跃至为10 Nm,4s时阶跃至为15 Nm,6s时阶跃至为20 Nm,8s时阶跃至为25 Nm,10s时阶跃至为30 Nm。参考定子磁链幅值为0.3 Wb。仿真时长12s。
在一般简化备选电压矢量集合和模糊控制简化备选电压矢量集合控制下,电机转速、电机转矩、定子磁链幅值和定子磁链轨迹分别如图8~图15所示。
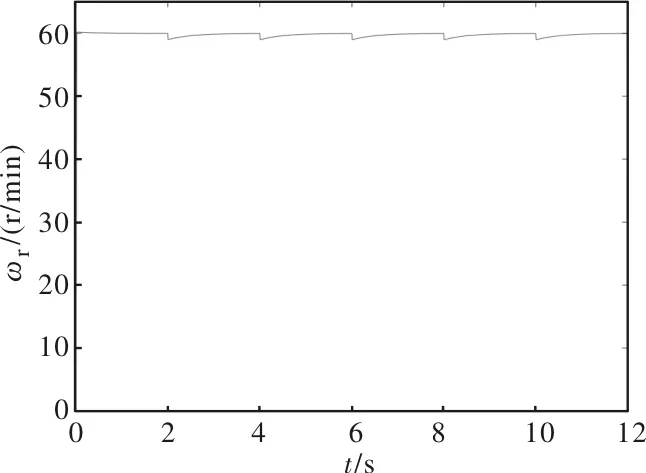
图8 一般简化备选电压矢量集合下电机转速

图9 一般简化备选电压矢量集合下电机转矩
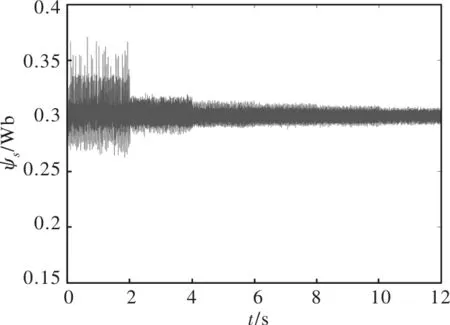
图10 一般简化备选电压矢量集合下定子磁链幅值
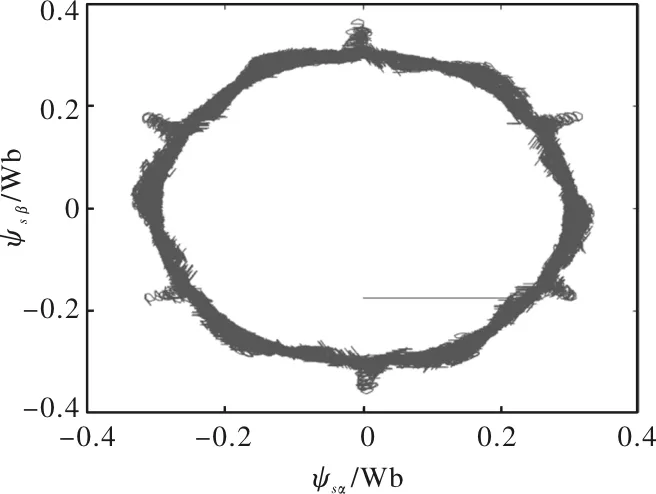
图11 一般简化备选电压矢量集合下定子磁链轨迹
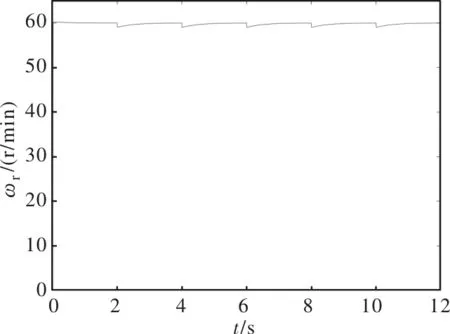
图12 模糊控制简化备选电压矢量集合下电机转速
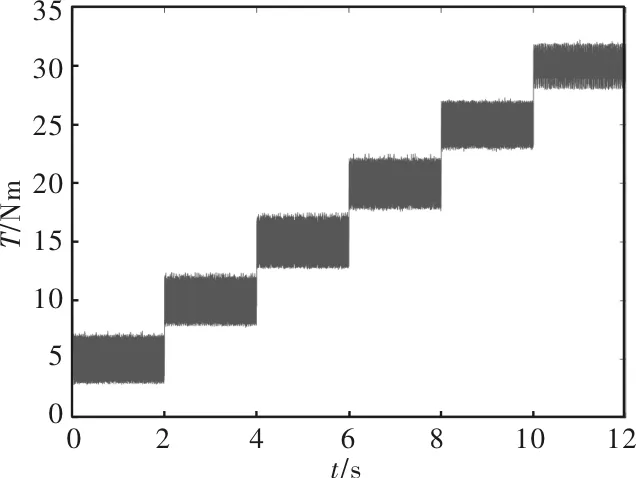
图13 模糊控制简化备选电压矢量集合下电机转矩
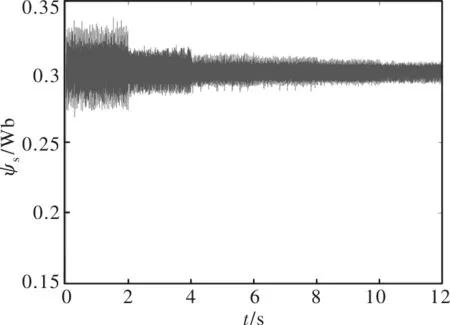
图14 模糊控制简化备选电压矢量集合下定子磁链幅值
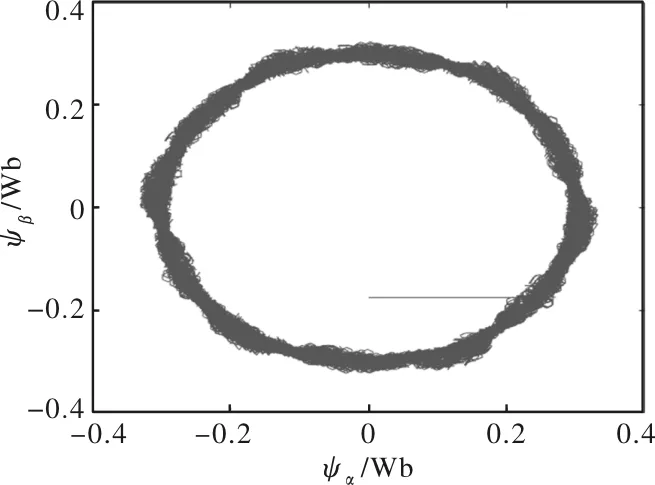
图15 模糊控制简化备选电压矢量集合下定子磁链轨迹
仿真结果表明:一般简化备选电压矢量集合和模糊控制简化备选电压矢量集合控制下,永磁同步电机模型预测转矩控制系统均能满足磁链和转矩控制要求。
在相同仿真条件下,传统模型预测转矩控制、一般简化备选电压矢量集合与模糊控制简化备选电压矢量集合控制下的转矩脉动和磁链脉动波形分别如图16~图21所示。

图16 传统模型预测转矩控制下转矩脉动

图17 传统模型预测转矩控制下磁链脉动
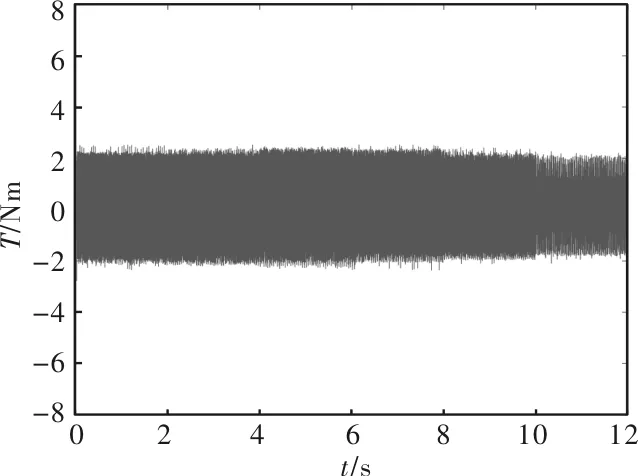
图18 一般简化备选电压矢量集合下转矩脉动

图19 一般简化备选电压矢量集合下磁链脉动
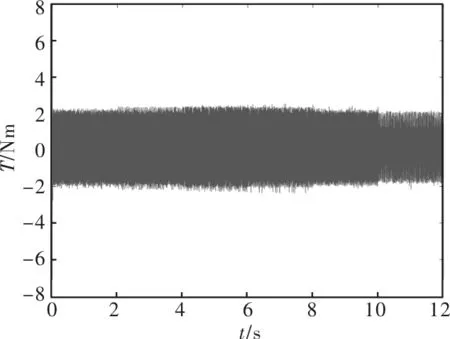
图20 模糊控制简化备选电压矢量集合下转矩脉动

图21 模糊控制简化备选电压矢量集合下磁链脉动
定义转矩脉动RMSE和磁链脉动RMSE如式(6)~式(7)所示,其中n为采样个数,t为仿真时长。
(6)
(7)
传统模型预测转矩控制、一般简化备选电压矢量集合与模糊控制简化备选电压矢量集合控制下的转矩脉动RMSE和磁链脉动RMSE如表6所示。

表6 转矩脉动RMSE和磁链脉动RMSE
以定子磁链扇区θ1为例,不同控制策略下,电压矢量V0~V6在定子磁链扇区θ1内利用率如表7所示。
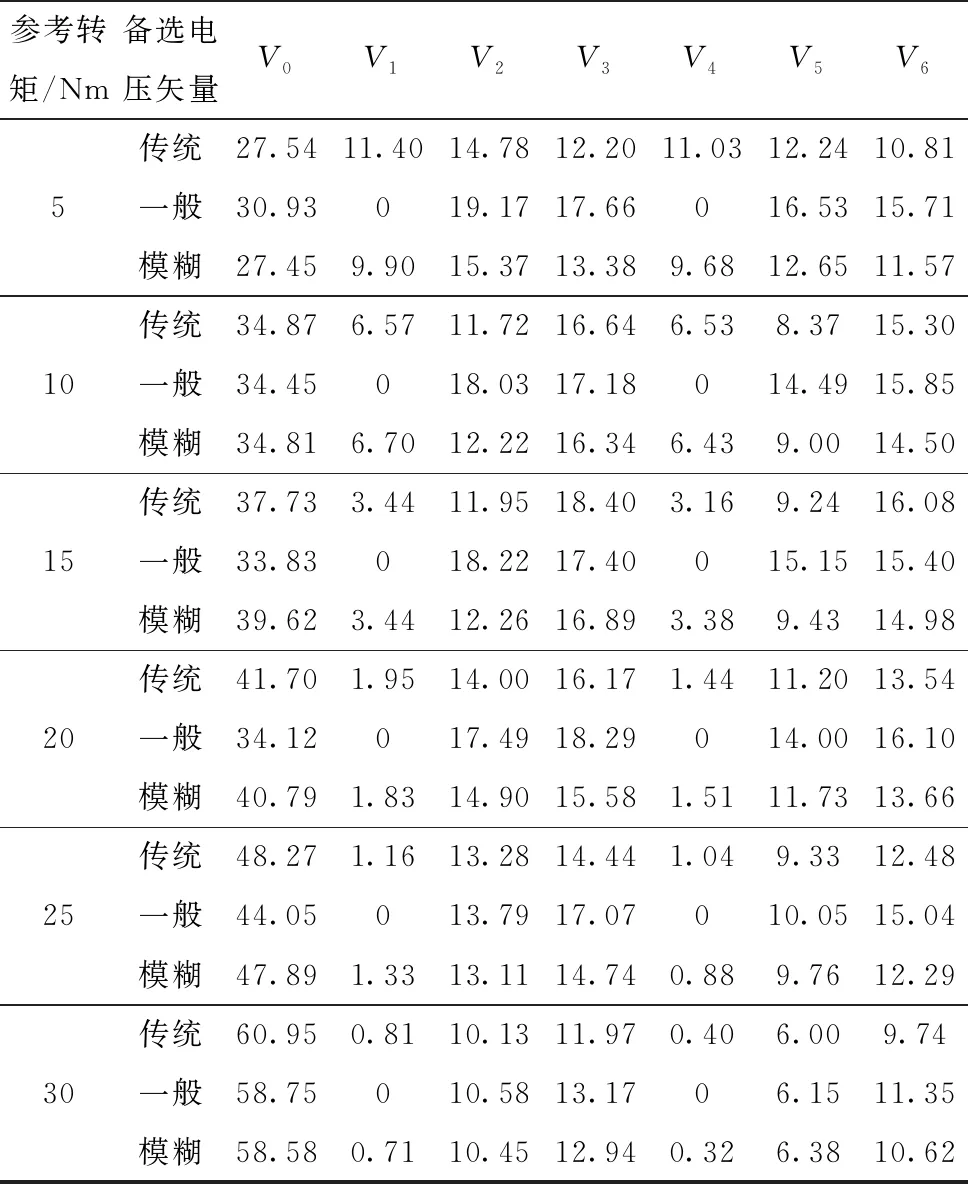
表7 电压矢量利用率/%
模糊控制简化备选电压矢量集合控制下,备选电压矢量数目为7个或5个的占比情况如表8所示。
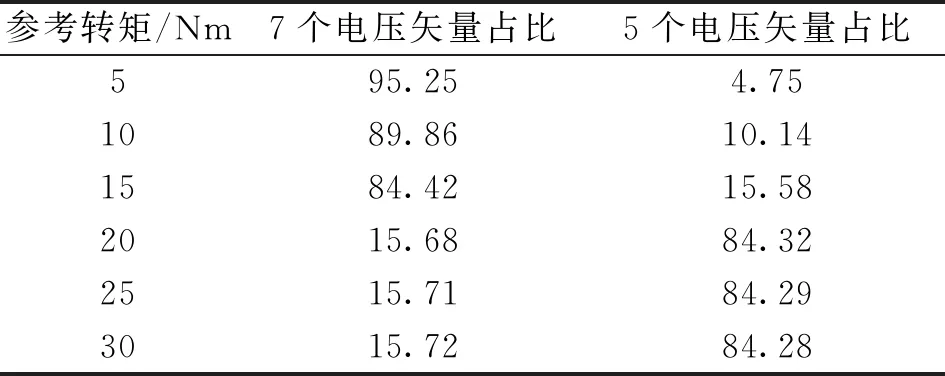
表8 模糊控制下备选电压矢量数目占比/%
由仿真结果可知,采用一般简化备选电压矢量集合与模糊控制备选电压矢量集合控制,磁链和转矩控制效果与传统模型预测转矩控制基本相当,但在转矩较小时,一般简化备选电压矢量集合磁链和转矩脉动较大。模糊控制备选电压矢量集合在转矩较小时偏向使用7个基本电压矢量,使得控制性能与传统模型预测转矩控制基本相当,在转矩较大时偏向使用5个基本电压矢量,提高系统实时性。由于转矩较大时,传统模型预测转矩控制实际也大多仅使用5个基本电压矢量,模糊控制备选电压矢量集合依然保持较好的控制性能。
4 结 语
本文建立了基于定子磁链坐标系的表面式永磁同步电机模型预测转矩控制,基于模型预测转矩控制对基本电压矢量的利用率,提出了两种备选电压矢量集合简化方法。方法一在一个定子磁链扇区内只使用5个基本电压矢量,从而将一个控制周期内的7次预测运算减少至5次。方法二采用以转矩角和定子磁链位置为输入,备选电压矢量为输出的模糊控制器对备选电压矢量集合进行简化。仿真结果表明:两种方法的磁链和转矩控制效果与传统模型预测转矩控制基本相当。模糊控制备选电压矢量集合在转矩较小时偏向使用7个基本电压矢量,使得控制性能与传统模型预测转矩控制基本相当,在转矩较大时偏向使用5个基本电压矢量,提高系统实时性。