一种永磁同步电机磁链和转矩估计的新方法
2020-08-01童维勇沈召源
童维勇,沈召源
(深圳市英威腾电动汽车驱动技术有限公司,广东 深圳 518106)
0 引 言
对用于电动汽车、轨道交通等领域应用的永磁同步电机来说,通常是通过给定转矩指令来控制电机的转速,并且需要牵引传动系统有较小的转矩脉动。此时永磁同步电机的转矩控制过程中如果采用查表的方法进行转矩开环控制,需要做大量的标定工作来获取表格数据,使得软件开发成本较高。如果进行转矩闭环控制可以省去大量的标定工作,但是需精确的电磁转矩反馈量。考虑安装和维护成本,永磁同步牵引传动系统通常不会安装扭矩测量仪,所以通过电流、电压、磁链、转速等信息进行电磁转矩估计具有重要意义。
目前已经有大量的文献对永磁同步电机的电磁转矩估计做了研究,但是仍然存在一些难以解决的问题。文献[1-3]研究了根据已知的永磁体磁链和两相旋转坐标系下电感参数及电流实时采样值采用公式直接计算法电磁转矩的方法。其中文献[1]中永磁体磁链和电感参数由实验测试得到,需要提前标定。文献[3]中计算电磁转矩使用到的电机参数是通过参数辨识得到的,改善了计算转矩的准确度,但是由于永磁同步电机参数辨识方程存在欠秩问题目前还无法实现3个即以上参数的同时辨识。文献[4]指出在转动状态下转子转速、电机定子绕组电阻和转子永磁磁链幅值不可能同时被辨识算法辨识出来。文献[5]得出了永磁同步电机参数辨识结果受已知参数的准确程度影响较大的结论。为了减小转矩估计精度对电感参数和永磁磁链参数准确度的影响,不少学者研究了先观测定子磁链再由定子磁链计算转矩的方法。传统的定子磁链观测器可分为两种:电压模型磁链观测器和电流模型磁链观测器。然而,电压模型磁链观测器受积分初始值和积分漂移的影响,而电流模型磁链观测器受电机电感参数和永磁体磁链参数的影响。为此,文献[6]针对电压模型磁链观测器提出了3种改进的方法来解决积分漂移的问题。其中,方法1采用了输出饱和反馈的方法,但是当磁链幅值估计不准时仍然会使得估计的磁链实时值存在直流偏置或者波形畸变,方法2只适用于磁链幅值不变的场合,方法3引入了额外的比例积分调节器对磁链幅值进行校正,但没有考虑速度较低时出现相位偏移的问题。文献[7-8]采用低通滤波器代替电压模型中的积分,并再分别进行幅值相位补偿,从而得到定子磁链。然而因低通滤波器,电机中固有的高次谐波会影响磁链的观测精度。文献[9]采用高通滤波器代替电压模型中的积分,并再进行幅值相位补偿,从而得到定子磁链。然而因高通滤波器,直流偏置等低频信号会影响磁链的观测精度。文献[10]设计了混合电压电流模型的磁链观测器,克服了传统的电压模型受积分初始值和积分漂移的影响,但引入了电机电感和永磁体磁链等参数,受参数影响较严重。文献[11-12]在dq坐标系下构建了定子磁链的全阶状态观测器,但根据该方法得到的定子磁链准确度仍然受到d轴电感参数和q轴电感参数准确度的影响。而且dq轴下的状态方程存在交叉耦合,观测器的设计难度较大。
针对这些问题,文献[13] 根据PMSM的数学模型推导了有效磁链模型。基于此模型,很多学者研究了在两相静止坐标系下设计有效磁链观测器并估计磁链的方法,这类方法观测得到的定子磁链准确度不依赖于d轴电感参数和q轴电感参数的准确度,非常适合于电感参数变化较大的工程应用。由于观测器的输入为交流信号,受到观测器带宽限制,观测得到的磁链较真实的磁链有一定的相位偏差,且电机速度越高时相位偏差越大严重。
为了减小两相静止坐标系下磁链观测相位偏差,提高定子磁链和转矩估计值的准确度,这篇文章提出根据dq轴电流估计值与实际值的偏差对有效磁链估计结果进行自适应相位补偿并根据补偿后的结果计算定子磁链和电磁转矩的方法。
1 永磁同步电机数学模型
(1)
根据两相旋转坐标系下内嵌式永磁同步电机(IPMSM)的电磁转矩公式(1)定义有效磁链ψe为
ψe=[ψf+(Ld-Lq)id]
(2)
以上两式中ψf为电机永磁体的磁链,Ld和Lq分别为电机的直轴同步电感和交轴同步电感,id和iq分别为电机定子电流的d、q轴分量,p为电机的极对数。
在两相旋转坐标系下电机的电压方程可写为包含有效磁链的如下形式:
(3)
式中,Rs为定子电阻,ω为转子的电角速度,d为微分算子。
对方程(3)两边同时乘两相旋转坐标系到两相静止坐标系的变换矩阵可以得到
(4)
式(4)中的两相静止坐标系下的变量和式(3)中两相旋转坐标系下的变量的关系为
(5)
式中,z为电流i、电压u等物理量,而zα、zβ分别为其α轴和β轴分量,zd、zq分别为其d轴和q轴分量,θ为转子磁极的电角度。式(4)中
(6)
如果忽略ψe的幅值变化还可以得到
(7)
2 定子磁链与电磁转矩估计
2.1 基于有效磁链模型的状态观测器设计
根据上一节中的方程式(4)和式(7)选取有效磁链为状态变量,得到状态方程为
(8)
其中,
设计观测器方程为
(9)

比较式(8)和式(9)可得扩展磁链观测误差方程为
(10)

为了使观测器具有较好的稳定性和鲁棒性,可将式(10)所示的微分方程特征矩阵的根配为同一负实数,如-ρ,即得反馈增益矩阵为
(11)
2.2 有效磁链估计结果的相位补偿
为了减小两相静止坐标系下永磁同步电机磁链观测结果相位偏差对观测器输出的有效磁链估计值进行相位补偿。当补偿角为θcomp时,对ψeα、ψeβ进行相位补偿计算得到有效磁链α轴和β轴轴分量的第二估计值ψeα_2和ψeβ_2的表达式为
(12)
其中,θcomp根据上一周期的电流估计值和电流测量值的dq轴分量计算得出。
首先根据式(13)所示的迭代公式计算定子电流αβ轴分量的估计值iα_est和iβ_est。
(13)
式中,tcalc为两次计算的时间间隔,iα_est_last和iβ_est_last为上一个计算周期的定子电流αβ轴分量的估计值,iα_est_last和iβ_est_last初值设定为0。
然后对iα_est和iβ_est进行等幅值形式的Park变换得到电流的dq轴分量的估计值id_est和iq_est。
最后根据id_est和iq_est以及电流的dq轴分量id和iq由比例积分器计算得到下一个控制周期的磁链相位补偿角θcomp。其频域表达式如下:
(14)
式中,Kp_1、Kp_2为可调比例系数,Ki_1和Ki_2为可调积分系数。
2.3 定子磁链和电磁转矩计算
根据有效磁链结果计算定子磁链为
(15)
根据定子磁链估计值和电流计算电磁转矩估计值为
(16)
3 Matlab/Simulink仿真分析
根据以上磁链和转矩估计方法,设计了如图1所示以转矩估计值作为反馈量的转矩闭环控制系统。通过采集三相电流信号iu,iv,iw,母线电压信号udc,电机转子位置信号θ,再结合两相静止坐标系下的电压电流分量和两相旋转坐标系下的电流分量实现定子磁链估计和电磁转矩的估计,在两相旋转坐标系下进行转矩闭环和电流闭环控制。

图1 永磁同步电机转矩闭环控制系统框图
为了验证文章提出的磁链和转矩估计方法的有效性,利用Matlab/Simulink工具箱建立仿真模型,进行数值仿真。系统参数如表1所示。

表1 仿真系统的参数
为了验证磁链和转矩估计的效果,将电机给定转矩设定为额定转矩,使电机从0速加速到1800r/min以上。为了验证使用该方法估计电机定子磁链和转矩对电机的电路参数依赖较小,假设已知Ld参数为实际参数的120%,Lq为实际参数的120%,ψf为实际参数的120%,有效磁链相位补偿前和相位补偿后的定子磁链估计结果和转矩估计结果分别如图2和图3所示。

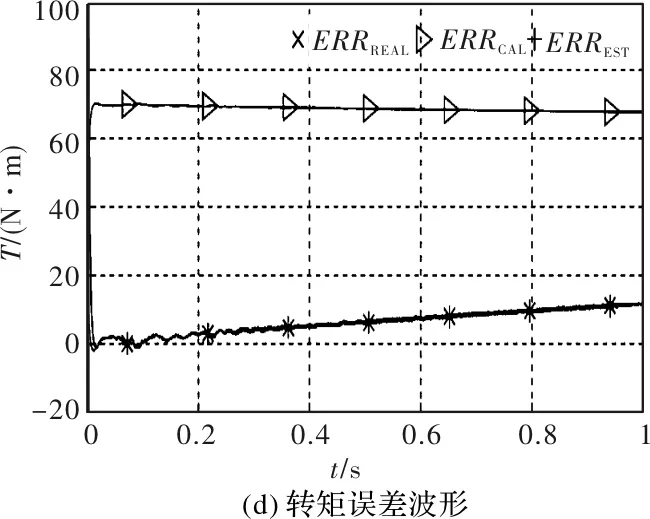
图2 未加入有效磁链角度补偿时的波形图

图3 加入有效磁链角度补偿后的波形图
图2和图3中的子图(a)中◇标注的为定子磁链α轴分量实际值ψα_REAL,○标注的为其估计值ψα_EST,△标注的为估计误差ψα_ERR;子图 (b)中◇标注的为定子磁链β轴分量实际值ψβ_REAL,○标注的为其估计值ψβ_EST,三角形标注的为估计误差ψβ_ERR;子图 (c)中◇标注的为电机转速nFDB,○标注的为转矩给定值TREF,×号标注的为转矩实际值TREAL,△标注的为根据式(1)计算得到的转矩值TCAL,+号标注的为这篇文章提出的方法估计得到的转矩值TEST;子图 (d)中×号标注的为转矩实际值与转矩给定值之间的误差ERRREAL,△标注的为根据式(1)计算得到的转矩值与转矩实际值之间的误差ERRCAL,+号标注的为这篇文章提出的方法得到的转矩估计值与转矩实际值之间的误差ERREST。
由图2、图3可知在电机参数存在误差(交直轴电感和永磁体磁链系数都偏大20%)的情况下,根据式(1)计算得到的电磁转矩值与实际转矩值存在约70 Nm的偏差,达到额定转矩的20%,误差较大,而根据这篇文章的方法计算得到的电磁转矩与实际值的误差较小。由图2可知,未实施有效磁链相位补偿时,随着转速增大定子磁链的α轴分量和β轴分量估计误差也明显增大,导致转矩估计值TEST与实际值的误差ERREST明显增大,转矩实际值TREAL与给定值TREF之间的误差也明显增大,最大误差约为12 Nm,约占额定转矩的3.4%。由图3可知,经过有效磁链相位补偿后,随着转速增大定子磁链的α轴分量和β轴分量估计误差不会明显增大,转矩估计值TEST与实际值的误差ERREST始终较小,最大误差小于2 Nm,不到额定转矩的0.6%,转矩实际值与转矩给定值的误差也很小。
4 结 语
文章针对目前的永磁同步电机电磁转矩估计方法存在的问题对基于有效磁链观测器的方法进行改进,提出了根据两相旋转坐标系下电流估计值和实际值的误差对有效磁链估计结果进行补偿的方法。通过仿真结果验证了基于有效磁链观测器估计定子磁链和电磁转矩受电机参数误差的影响较小,也验证了用文章所提出有效磁链补偿的方法可以在速度较高时减小定子磁链和转矩估计结果的误差,使转矩控制更加准确。
