优化反馈补偿闭环定子磁链观测器
2022-10-12王淑玉罗振鹏张思清王小龙
王淑玉,罗振鹏,张思清,韩 越,王小龙
(内蒙古工业大学 内蒙古自治区机电控制重点实验室,呼和浩特 010080)
0 引 言
直接转矩控制(DTC)是继矢量控制技术之后发展起来的一种新型的高性能交流调速系统。利用测量的定子电压和电流,计算当前电机定子磁链矢量的位置,再通过磁链和转矩与给定值的数值差,选取合适的电压矢量,从而实现对IM的控制。其中计算定子磁链矢量的位置也就是指对定子磁链的幅值和相位进行观测,该过程是整个DTC的核心部分,也是实现直接转矩控制性能的关键[1-3]。
目前使用较多的电压模型观测器存在明显的纯积分问题如直流偏置和积分漂移[4]。因此本文分析了传统磁链观测方法和反馈补偿闭环磁链观测器,并对反馈补偿闭环磁链观测器进行了改进。改进的观测器与原始反馈补偿闭环磁链观测器相比[5],改进后的调整了PID控制器的输入量,即为磁链与反电动势两矢量的夹角余弦值,这让反馈补偿控制量的物理意义更加明确,并且利用简单的乘法运算替代了原有复杂的矢量分解与合成过程,简化了磁链观测器的结构,使其响应速度加快,并且提升了异步电机的动态性能,更有易于工程实现。
1 磁链和反电动势的数学模型
稳态下,在两相静止αβ坐标系中,定子反电动势在α和β轴的分量esα和esβ可以表示为
(1)
式中,esαa和esβa是分别是定子反电动势在α和β轴上的正弦分量;c1、c2分别表示esα和esβ中的直流分量。
定子反电动势在α和β轴上的正弦分量可表示为
(2)
式中,Em为幅值;ω1为角频率;φ0为初始相位。
对定子反电动势在α和β轴的分量esα和esβ分别积分可得,定子磁链在α和β轴的分量Ψsα和Ψsβ:
(3)
式中,Ψsαa和Ψsβa分别为Ψsα和Ψsβ的正弦分量,其满足关系式:
(4)
Ψsα0和Ψsβ0分别是Ψsα和Ψsβ的直流偏置量,其表达式为
(5)
c1t和c2t分别是Ψsα和Ψsβ的积分漂移分量[6]。
2 传统磁链观测方法改进的反馈补偿闭环磁链观测器
2.1 纯积分观测器
根据上述反电动势和磁链的数学公式可知,采用直接积分的方法,得不到预期结果。尽管通过改变反电动势的初始相位可以消除积分初值误差,但直流分量仍然存在[7]。
2.2 低通滤波磁链观测器
纯积分磁链观测器的拉氏变换表达式为
(6)
引入低通滤波器,可得低通滤波磁链观测器的表达式:
(7)
式中,ωc为截止频率。
低通滤波磁链观测器的结构如图1所示[8]。
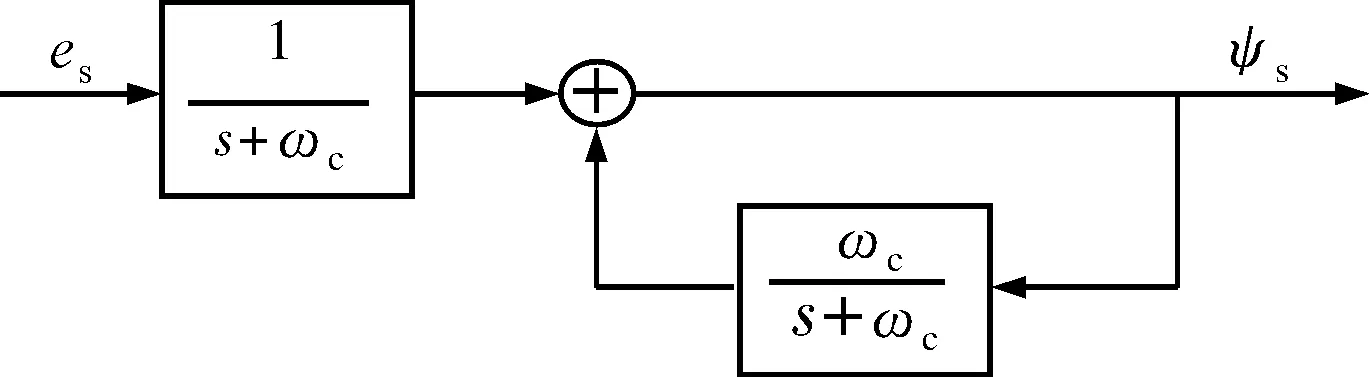
图1 低通滤波磁链观测器结构图
低通滤波磁链观测器1/(s+ωc),完成了纯积分器的计算和将积分产生的直流分量进行了有效的滤除或抑制。该磁链观测器的性能比纯积分观测器要好,但不足的是,其导致输出磁链的幅值和相位会随着输入的截止频率ωc的不同而变化,比较适用于低速情况下使用。
2.3 饱和抑制磁链观测器
饱和抑制磁链观测器结构如图2所示。采用对幅值限幅的方式来抑制积分漂移的问题。该方法在一定程度上提高了磁链观测精度,消除了稳态情况下与实际值之间的偏差[9]。
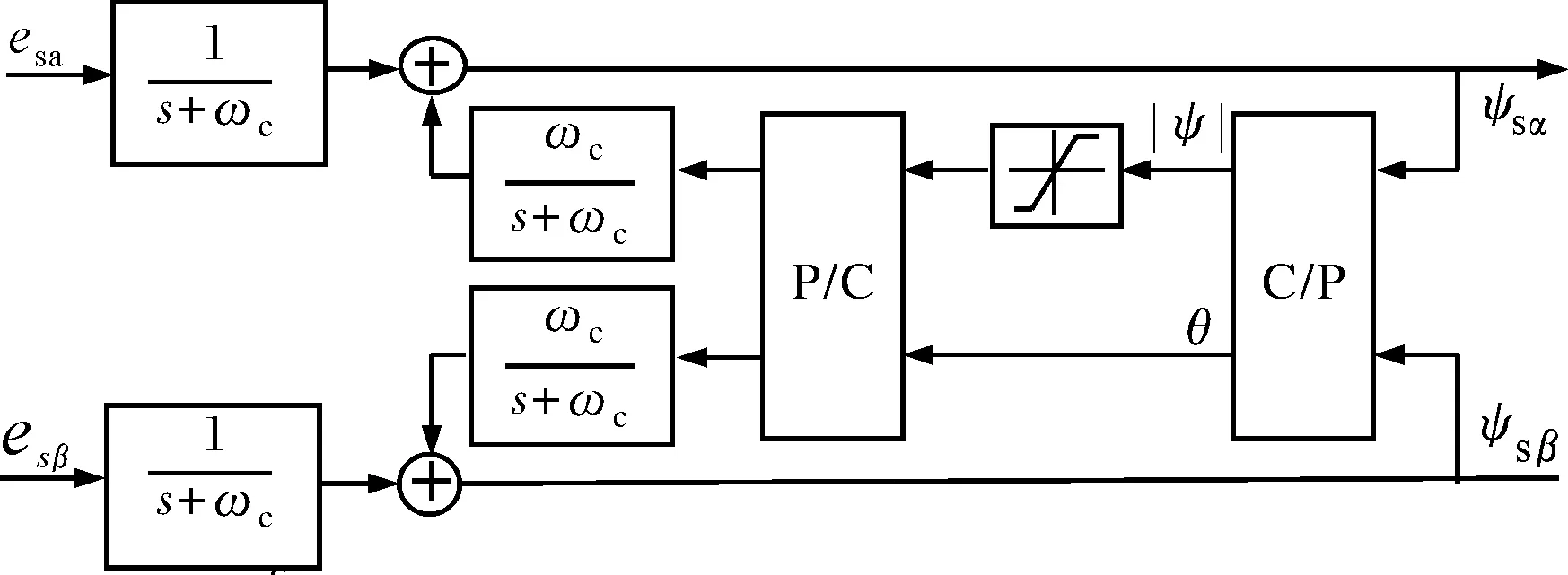
图2 饱和抑制磁链观测器结构图
3 改进的反馈补偿闭环磁链观测器
3.1 反馈补偿闭环磁链观测器
幅值限定的改进积分观测器,动态性能较差只适用定子磁链幅值不变的场合,当负载突变时观测结果误差较大。为了解决定子磁链动态性能差的问题,有一些学者提出了反馈补偿控制思想,即通过磁链矢量与反电动势矢量的正交度来进行补偿控制,结构如图3所示[10]。

图3 反馈补偿闭环磁链观测器初始模型
该磁链观测器,能够改善定子磁链的动态性能,但反馈补偿控制量的物理意义不明确。
3.2 改进的反馈补偿闭环磁链观测器
定子磁链和反电动势两矢量之间的关系可表示为
(8)
若因为直流偏置或积分漂移等问题使得两矢量的正交关系被破坏,就会导致式(8)不等于零。因此通过设计闭环反馈控制使式(8)等于零,从而抑制直流偏置或积分漂移问题带来的影响。
在纯积分观测器的表达式基础上,引入反馈补偿矢量Z,反馈补偿闭环磁链观测器表达式为
(9)
式中,Z为反馈补偿信号。
当Z=0时:即Ψs=ΨLPF,为一阶低通滤波器。
(10)
当Z=Ψs时,则为纯积分观测器如式(6)。由此可知Z取值不同,会变成不同类型的积分器。
由反电动势与磁链两者的正交关系可知,反馈补偿矢量Z应使得cos
(11)
改进的磁链观测器结构如图4所示,矢量原理图如图5所示。
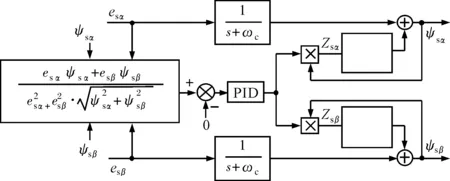
图4 改进的反馈补偿闭环磁链观测器结构图
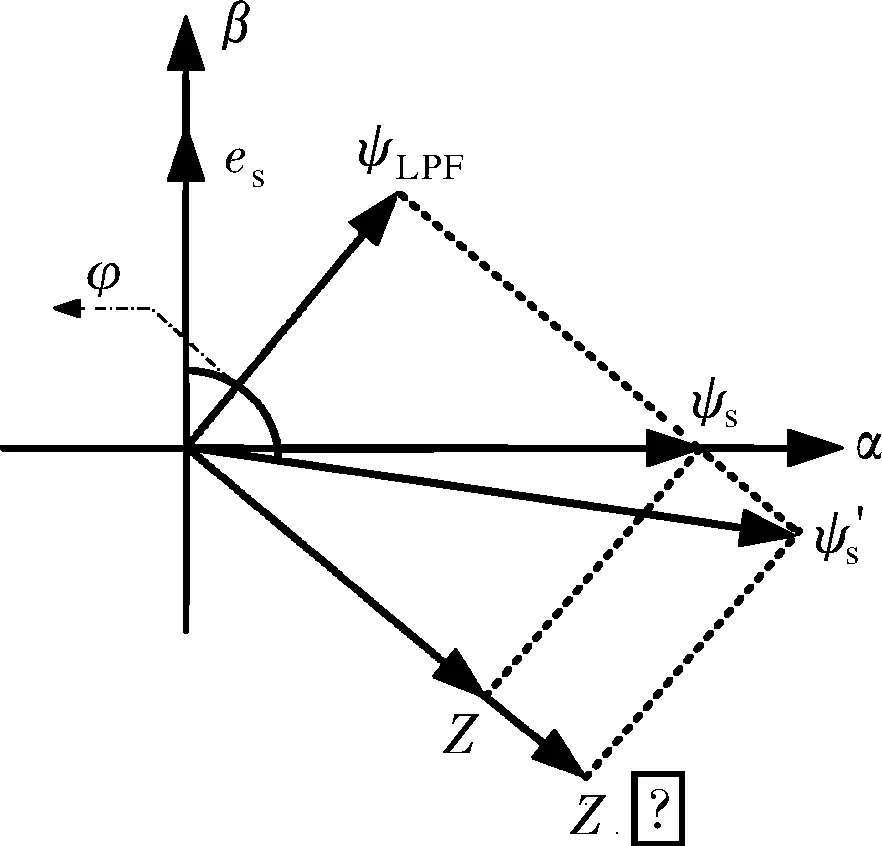
图5 改进的反馈补偿闭环磁链观测器矢量原理图
根据图(5)可知,在理想情况下,Ψs与es正交,这时式(8)计算输出结果为0,即控制量与给定值相同,此时PID控制器输出为零,反馈不起作用。若因为积分初值不为零或积分漂移等情况导致Ψs与es的正交关系被破坏,使
3.3 算法原理分析及收敛情况证明
由于反馈补偿控制的目标是得到正确的磁链观测结果,那也就是Ψsα和Ψsβ收敛到Ψsαa和Ψsβ即cos〈es,Ψs〉收敛到0。对式(1)和式(3)分别取拉普拉斯变换,得式(12)和式(13)。将式(12)和式(13)带入式(8),整理可得式(14)。
(12)
(13)
(14)
根据终值定理有:

(15)
由式(15)可知,cos
4 仿真分析与验证
4.1 几种磁链观测器的对比
为了观察改进的反馈补偿闭环磁链观测器的运行效果,在仿真平台中搭建了上述五种磁链观测器的模型,仿真时间设置20 s,ωc设为100 rad/s,输入量设置为以下两段不同的函数:0 s~10 s:
esα=sin(3t)+0.01
esβ=cos(3t)+0.01
(16)
10~20 s:
esα=0.4sin(6t+30)+0.01
esβ=0.4cos(6t+30)+0.011
(17)
0 s时输入的反电动势幅值为1 V,频率为3 rad/s,初始相位为0,直流偏移设置为0.01;10 s时输入的反电动势幅值突变为0.4 V,频率改为6 rad/s,初始相位变为30,直流偏移量不变,得到五种观测器的仿真对比波形如图6所示。
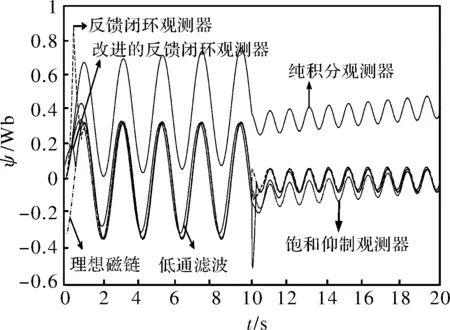
图6 五种磁链观测器的仿真对比波形图
通过图6可以看出,纯积分观测器输出波形偏移效果最为明显,并且随着时间推移其直流分量越来越大;引入低通滤波器有效的抑制了输出波形的直流偏移,但同时也产生了相位及幅值的偏差;饱和抑制观测器在10 s前,输出波形追踪理想曲线,在10 s后,由于输入量的突变输出波形产生了幅值偏差,但也在逐渐靠近理想曲线;与前三种磁链观测器相比,反馈闭环磁链观测器跟踪理想磁链波形的效果更好;改进的反馈闭环磁链观测器则进一步优化了输出波形,使其能够从一开始就快速与理想曲线重合,并稳定输出,在输入量变化后也能够快速响应,与新的理想曲线重合,然后稳定输出,体现了良好的稳定性及动态响应性能。
4.2 直接转矩控制的仿真研究
在三相异步电机的直接转矩控制系统中分别使用纯积分观测器和改进的反馈补偿闭环磁链观测器进行磁链观测,并对两者观测结果进行仿真分析对比。异步电机的参数如下表1所示。
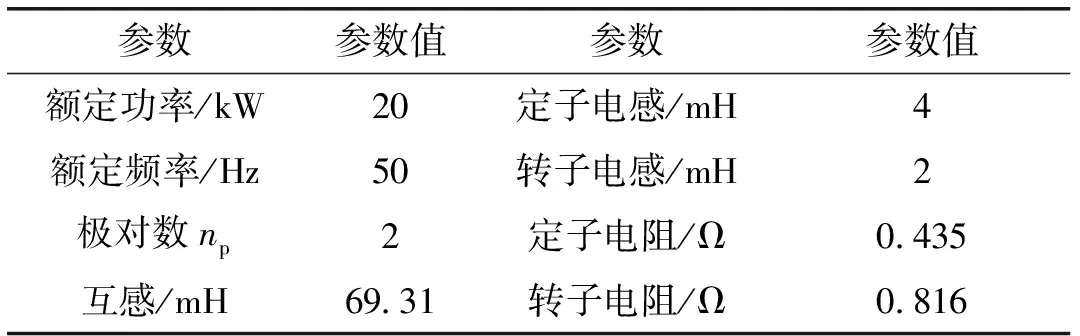
表1 异步电机参数
系统仿真结构如图7所示。为了在仿真环境中观察所改进的磁链观测器与低通滤波磁链观测器和反馈闭环磁链观测器的性能差别,手动设置反电动势直流偏置为0.2 V;仿真时间设为2 s。
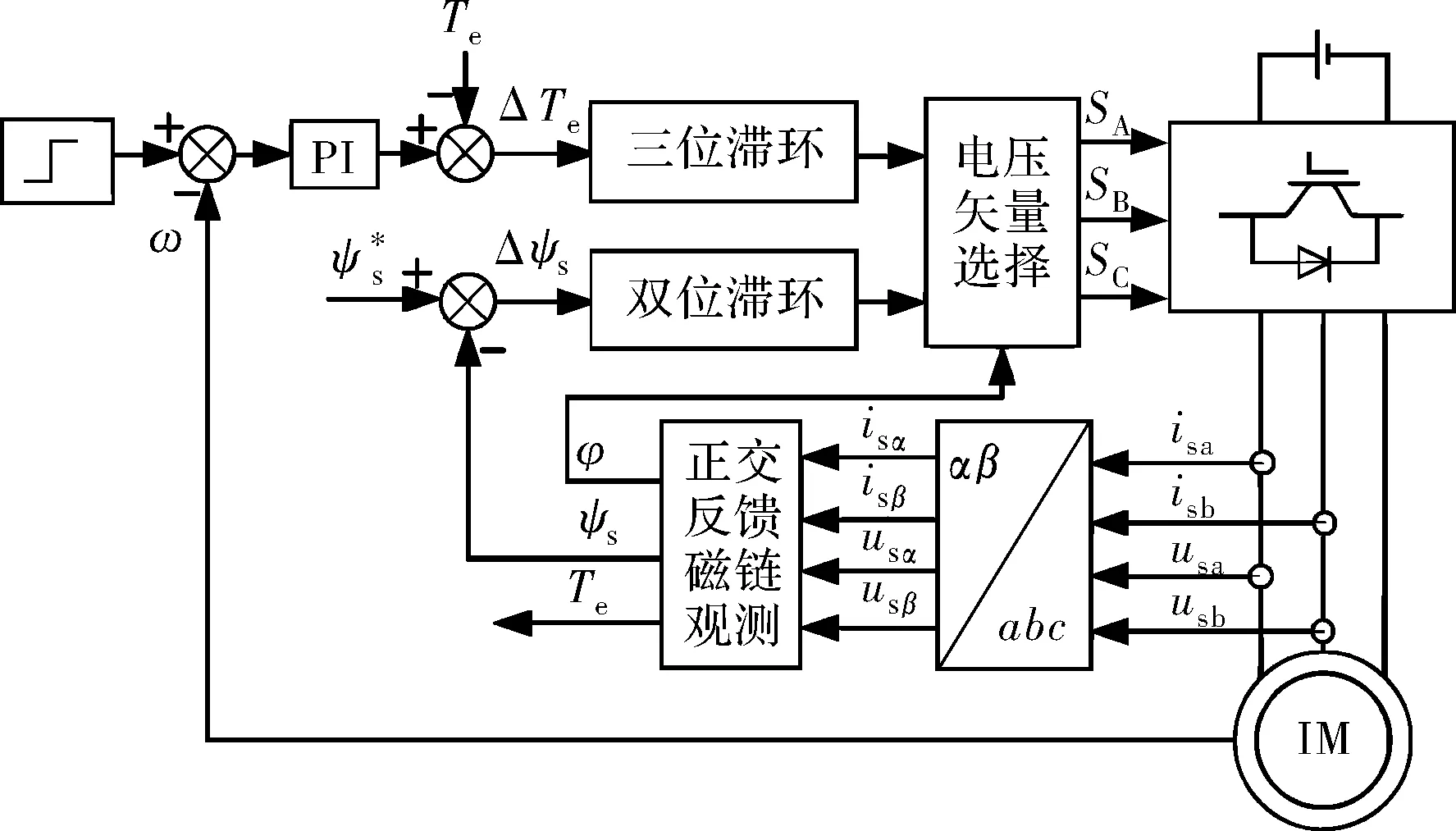
图7 系统仿真结构图
图8为给定转速变化时,采用三种不同观测器时的转速波形对比图。波形显示了给定电机转速变化时不同磁链观测器作用下的系统转速跟踪目标值的过程。在0 s~0.5 s时间内,电机稳定运行,0.5 s时刻,电机转速从500 r/min加速到2000 r/min,1.2 s时刻,电机从2000 r/min减速到1000 r/min,在这个过程中,采用低通滤波磁链观测器的电机,转速无法跟踪给定值,转速达不到目标值,动态性能较差;而反馈闭环观测器与改进的观测器则能够迅速与目标曲线重合,并稳定输出,体现了良好的稳定性和动态响应性能。
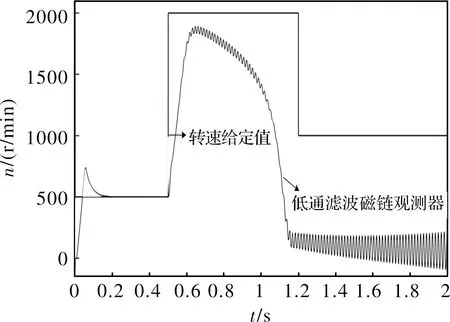
图8 转速对比波形
图9为给定转速1000 r/min,负载转矩变化时,采用三种不同观测器时的转速波形对比图。波形显示了负载转矩从5 N/m突增为20 N/m再减小至10 N/m的动态变化过程中,不同磁链观测器作用下的系统转速跟踪目标值的过程。采用低通滤波磁链观测器的电机,转速无法跟踪给定值,而反馈闭环观测器与改进的观测器则能很好的跟踪目标曲线。
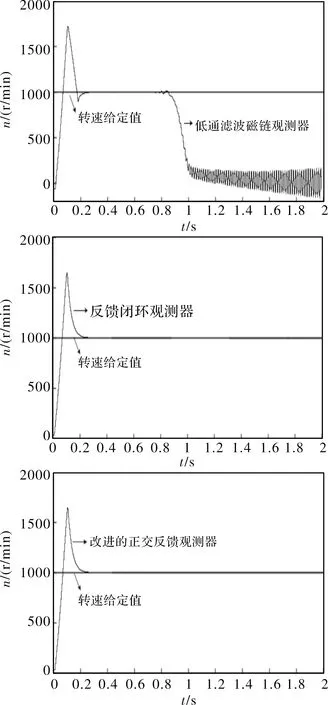
图9 负载转矩变化时转速对比波形
通过观察采用三种不同观测器的情况下,给定转速变化时系统输出的转速波形和负载转矩变化的过程中输出的转速波形,可知,当反电动势存在直流偏置时,低通滤波观测器能够抑制输出波形的直流偏移,但是动态性能不好,无法跟随系统的变化而变化,同时也验证了改进的反馈闭环磁链观测器是可行的,并且具有良好的稳定性和动态性能,实验结果验证了理论的正确性。
5 结 论
本文在反馈闭环磁链观测器的基础上,对其进行了优化改进,利用磁链、反电动势的夹角余弦值与零的差值作为控制量,通过简单的乘法运算取代原本复杂的矢量分解与合成过程,来对磁链进行补偿控制。优化的反馈闭环磁链观测器,反馈补偿控制量的物理意义明确,并且理论分析与仿真结果均验证了该改进观测器的正确性与可行性,即能够消除积分初值与直流偏移的影响,提高磁链观测器的精度和调速系统的动态性能。
