被动微波-红外双模复合制导交班误差分析
2015-04-24樊鹏飞欧阳中辉
樊鹏飞,欧阳中辉
(海军航空工程学院,烟台 264001)
被动微波-红外双模复合制导交班误差分析
樊鹏飞,欧阳中辉
(海军航空工程学院,烟台 264001)
针对舰空导弹采用双模复合制导导引头的特点,介绍了旋转式相位干涉仪的测角原理和红外玫瑰扫描跟踪目标的实现方法;在分析舰空导弹交班流程的基础上,对被动微波/红外制导交班误差进行了分类和计算,分析求解出导弹交班总误差;通过实例仿真,讨论了各误差源对交班误差的影响。仿真结果可为舰空导弹复合制导交班及导引头设计提供参考。
复合制导;交班;误差分析;舰空导弹
0 引 言
现代海战场环境复杂多变,反舰导弹突防技术日益进步,舰空导弹所面临的威胁层出不穷。随着打击距离的增加和复杂条件下抗干扰要求的不断提高,具有较强抗干扰能力的多模复合制导技术是舰空导弹制导系统发展的必然趋势[1]。采用被动微波/红外双模复合制导的舰空导弹,能够探测和跟踪反舰导弹的微波辐射信号和红外辐射信号。被动微波制导体制可以有效增大导弹的探测距离,但也存在着杀伤概率低、脱靶量大的缺点,因此在末制导中使用红外制导体制以保证舰空导弹有较高的制导精度。在被动微波子系统引导红外子系统截获目标的过程中,不可避免涉及到交班问题,能否顺利交班与复合导引头的误差密切相关,因此对双模复合制导交班误差的分析研究显得十分必要。
1 复合导引头信号获取机理分析
1.1 旋转式相位干涉仪测角原理
舰空导弹被动微波子系统采用旋转式相位干涉仪测角体制,旋转式相位干涉仪测角原理如图1所示。在被动雷达测角中相位干涉仪是较常用的一种角度测量方法,其基本原理是通过鉴别不同天线接收到的平面电磁波信号的相位差,然后经过角度变换计算出目标辐射源的视线角。目标辐射源的平面波由与天线视轴夹角为β方向传播而来,它到达2个天线会有相位差φ,该相位差φ与天线视轴夹角β成比例,相位干涉仪利用导弹自身的旋转使角度信息转换为弹体旋转频率的交流幅度与相位信息,解决了测角模糊问题,这就是被动微波测角的原理[2]。
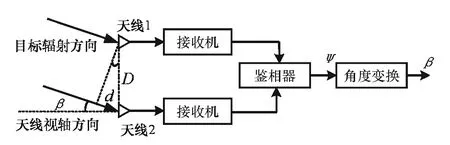
图1 旋转式相位干涉仪测角原理图
1.2 红外玫瑰扫描跟踪原理
舰空导弹导引头红外子系统主要由光学系统、探测器、位标器组件及二马达等组成,采用玫瑰线扫描方式将视场内的红外辐射场景扫描成相应的脉冲。导引头红外子系统利用其光学系统实现玫瑰线扫描,光学系统如图2所示。
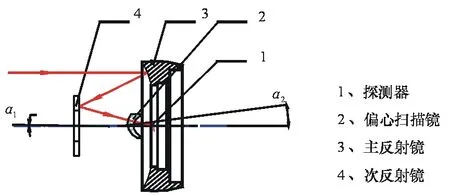
图2 红外导引头光学系统示意图
玫瑰扫描光学系统中的次镜相对主镜有一定的偏转,形成圆扫描,然后再通过反向旋转的偏心镜使目标像点在探测器所在平面上形成玫瑰扫描图案。目标在扫描场中的位置不同,光轴扫过目标的次数就不同,探测器产生的脉冲数也不同。测量信息脉冲和基准之间的时间间隔,经过计算即可得到偏离光轴的距离和方位。
红外导引头采用新的光机扫描技术,用一个小的瞬时视场通过扫描获得一个大的捕获视场(如图3所示),解决了视场大小与背景噪声的矛盾[3]。
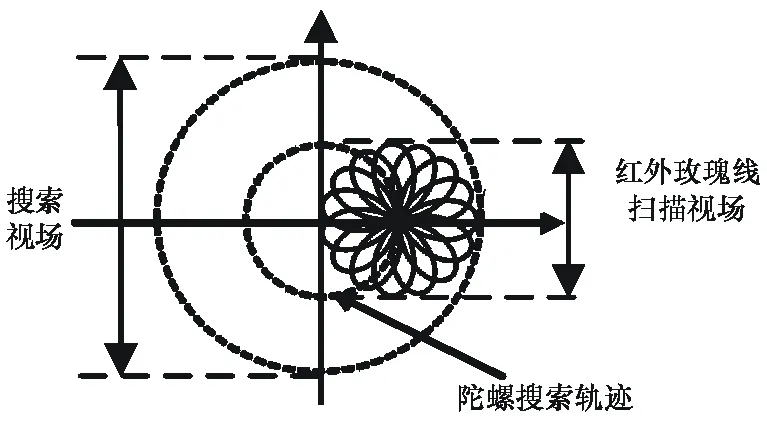
图3 红外导引头视场示意图
2 交班误差源分类与计算方法
根据上述对导引头测角定向原理的分析可知,在微波子系统引导红外子系统截获目标的过程中,其实质是相位干涉仪输出的目标视线角信号驱动陀螺指向目标,随动同步信号使红外导引头光轴与微波天线轴同向,从而确保目标位于红外系统的瞬时视场内,以实现红外导引头对目标的截获跟踪。引起交班误差的误差源主要有以下几种:(1)旋转相位干涉仪测角误差;(2)陀螺角跟踪回路误差;(3)红外导引头自身误差;(4)指令时延误差;(5)跟踪点不一致误差等。
2.1 旋转相位干涉仪测角误差
如图1所示,目标辐射方向与天线视轴方向夹角为β,计算得到辐射源到达2个天线的相位差为:
(1)
式中:D为天线间距;λ为辐射源的波长。
D和λ均可精确测定。若相位差φ也为已知,即可通过式(1)求得目标与天线视轴夹角β为:
(2)
对式(2)进行微分可以求得:
(3)
由式(3)可得:

(4)
式中:σβ为测量目标与天线视轴夹角β的误差;σφ为干涉仪测量信号相位差φ的误差;σλ为测量信号波长λ的误差;σD为测量天线间距D的误差。
分析式(4)可以得出以下结论:(1)由于λ和D已知并且测量较为精确,所以测角精度主要取决于φ的测量精度;(2)φ的测量误差越大,旋转相位干涉仪测角误差越大;(3)天线间距D越大,测角误差越小;(4)测角误差与夹角β有关。下面着重对φ的测量误差进行分析。在相位干涉仪测角系统中,接收到的信号在设备中经过各个环节都会引入附加相移[4]。导致相位误差存在的原因有很多,主要包括天线馈电设计误差σ1(其中天线引入的系统误差主要来源于三方面:一是由匹配网络相移不一致导致的误差σ11,二是由匹配网络造成天线相位特性畸变误差σ12,三是天线结构设计中的缺陷误差σ12);由2个信道之间固有的相位差和温度等原因导致的信道不均衡误差σ2;因鉴相器线性范围较小导致的比相误差σ3;式(2)产生的角度变换误差σ4等。假设各误差相互独立,则相位差φ的总均方根误差可表示为:
(5)
在不考虑波长λ和天线间距D的测量误差的情况下,旋转相位干涉仪测角误差σβ可简化为:
(6)
2.2 陀螺角跟踪回路误差
陀螺角跟踪系统一般由位标器、跟踪电路和伺服机构组成,当目标相对跟踪系统移动并改变其位置时,跟踪系统根据目标视线角度信息输出光轴角度信息,此时角误差亦即光轴与视线的夹角[5]。陀螺角跟踪回路误差表现为回路实时性误差,与输入输出信号、位标器提供的调制信号质量及伺服回路的响应特性有关。位标器与跟踪电路的时间常数远小于伺服机构的时间常数,在分析时可以忽略其影响。根据文献[6]的分析,陀螺角跟踪回路误差与系统回路时间常数及目标视线角旋转角速度成正比,而一个系统的时间常数一般是一定的,所以陀螺角跟踪回路误差主要与目标视线角速度有关:
(7)

2.3 红外导引头自身误差

假设各误差相互独立,则红外导引头自身误差可以表示为:
(8)
2.4 指令时延误差
通信系统的数据处理和传输以及导弹修正指令的产生往往具有滞后性,如果此时导弹正处于双模交班阶段,指令滞后时间则决定了导引头指向误差的大小。
为了便于分析,设导弹与目标位于同一平面内运动,对于不在同一平面内的情况可取导弹与目标在此平面内的运动参数分量。设制导雷达在t时刻测得目标位置为T1,目标位置指令延迟Δt时间后送出,此时目标已飞至点T2,设在目标位置指令送出时导弹位于M点,T1′、T2′是目标位置T1、T2在通过M点作出的与目标飞行方向平行直线MX上的投影,如图4所示。

图4 指令延时导致的导引头指向误差
从图4可以看出,T1,T2点与导弹M点连线T1M和T2M之间的夹角σq即为指令延时导致的导引头指向误差。不考虑机动情况,在目标作等速直线飞行条件下,由几何关系计算得到T2M与MX的夹角q2,T1M与MX的夹角q1的表达式为:
(9)
(10)
式中:P为在t+Δt时刻导弹所处位置M距目标航线T1T2的距离;Rd为t+Δt时刻弹目实际距离,此处取Rd为红外导引头的作用距离,即在指令送出时刻导弹正好处于交班阶段;vm为目标飞行速度。
因此,指令延时导致的导引头指向误差σq可以表示为[8]:
σq=q2-q1
(11)
2.5 跟踪点不一致误差
舰空导弹的拦截目标一般为反舰导弹,在双模复合制导交班过程中,被动微波子系统的跟踪点是位于反舰导弹头部的主动雷达,红外子系统的跟踪点是位于反舰导弹尾部的平均辐射中心,则在交班过程中会产生由复合导引头跟踪点不一致导致的误差[9]。根据图5所示的几何关系,求出此误差为:
(12)
式中:L为反舰导弹长度。
分析式(12),可知跟踪点不一致误差随着弹目距离的接近或者β的增大而增大。
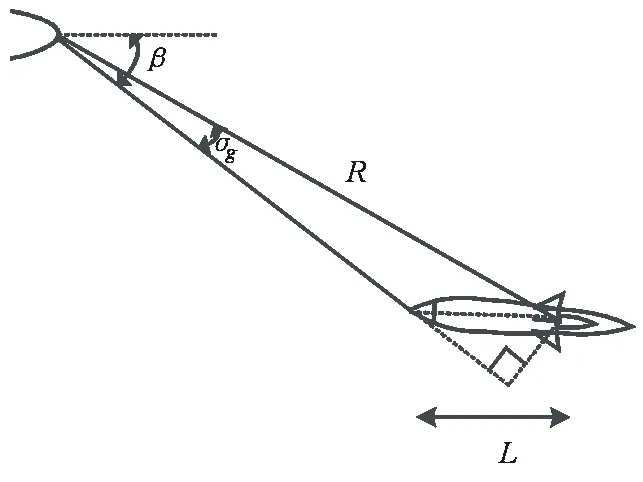
图5 被动微波和红外跟踪点示意图
3 交班总误差仿真分析
根据上述对各交班误差源计算方法的分析,假设各误差源之间相互独立,则可得出交班总误差为:
(13)

图6 t=7 s,R=3 000 m时的交班误差分布图
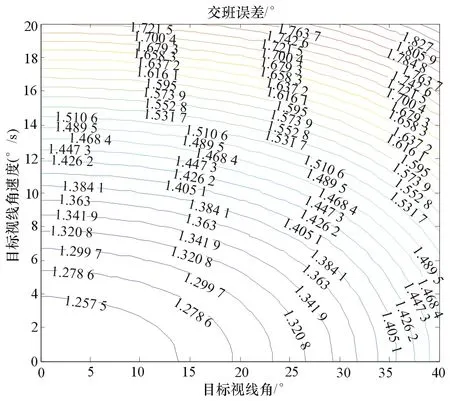
图7 t=8 s,R=2 000 m时的交班误差分布图
图8 t=9 s,R=1 000 m时的交班误差分布图
4 结束语
本文对被动微波/红外复合制导的各交班误差源进行了分类和计算,分析求解出交班总误差。由上述分析可得出结论:对于扫描视场为2.5°×2.5°的红外导引头来说,过大的目标视线角和目标视线角速度导致的误差对交班十分不利,这个问题的解决办法之一是红外导引头可采用玫瑰线扫描方式搜索截获目标,用一个小的瞬时视场通过扫描获得一个大的捕获视场,以降低交班误差要求。另外,从制导系统角度来看需要导引头提高交班能力,提高红外导引头分辨真实目标脉冲的水平,尽快在最短的时间内转入红外末制导,保证交班后的制导精度。
[1] 刘隆和.多模复合寻的制导技术[M].北京:国防工业
出版社,2001.
[2] 沈康.一种旋转式相位干涉仪测角系统研究[J].现代电子技术,2011,34(15):26-28.
[3] 叶尧卿.便携式红外寻的防空导弹设计[M].北京:中国宇航出版社,1996.
[4] 张文旭,司锡才,蒋伊琳.相位干涉仪测向系统相位误差研究[J].系统工程与电子技术,2006,28(11):1631- 1632.
[5] 钟任华,周茂树,何启予.飞航导弹红外导引头[M].北京:中国宇航出版社,2006.
[6] 彭绍雄,李学园,袁洪武,等.舰空导弹双模复合制导交班误差模型分析[J].兵工自动化,2012,31(2):64- 67.
[7] 胡利伟.防空导弹复合导引引导误差与角度截获问题研究[J].弹箭与制导学报,2009,29(1):39-42.
[8] 石章松,王航宇,王成飞.指令时延对舰空导弹中末制导交班误差影响分析[J].海军工程大学学报,2009,21(2):28-30.
[9] 任建存,胡利伟.舰空导弹复合导引头误差分析研究[J].现代防御技术,2009,37(1):59-65.
Hand-over Error Analysis of Passive Microwave/Infrared Dual-mode Combined Guidance
FAN Peng-fei,OUYANG Zhong-hui
(Naval Aeronautical and Astronautical University,Yantai 264001,China)
According to the characteristics of dual-mode combined guidance seeker of ship-to-air missile,the angle measuring principle of rotating phase interferometer and realization method of target tracking in infrared rosette scanning are introduced.Based on analyzing the hand-over process of ship-to-air missile,the hand-over error of passive microwave/infrared guidance is classified and calculated,total hand-over error of missile is analyzed and solved.Through example simulation,the influence of each error source on hand-over is discussed.Simulation result can provide reference for the study of hand-over process and seeker design for the combined guidance of ship-to-air missile.
combined guidance;hand-over;error analysis;ship-to-air missile
2014-08-11
TJ765.3
A
CN32-1413(2015)01-0032-05
10.16426/j.cnki.jcdzdk.2015.01.007