机场场面无源多点定位系统研究
2015-04-24沈金良
沈金良
(中国电子科技集团公司第51研究所,上海 201802)
机场场面无源多点定位系统研究
沈金良
(中国电子科技集团公司第51研究所,上海 201802)
无源多点定位(MLAT)是一种新式的目标监视技术,可推广用于机场场面、进近和航路(广域多点定位)的目标监视。研究了机场场面无源多点定位监视系统原理和基本概念,提出了一种能减少系统多路径干扰的信号预处理、A、C模式应答信号的识别和航迹处理方法,解决了系统被动监视过程中虚警率高的问题,保证了航迹的连续性,结合工程试验验证对原理框图了优化,给出了典型的系统配置和现场布置图和验证系统机场监视航迹图,为装备研制奠定了技术基础。
无源多点定位监视系统;应答信号;识别
1 概 述
无源多点定位(MLAT)是一种新式的目标监视技术,可推广用于机场场面、进近和航路(广域多点定位)的目标监视,是一种非协同监视技术。该系统在不增加机载设备的前提下,通过多个地面接收站接收的机载应答机信号,利用到达时间差(TDOA)定位技术[1]实现了目标精确测量定位,实时精确地对机场场面和场地区域移动目标进行监视。无源多点定位监视系统为机场场面提供了一种与传统一次场面监视雷达不同的新技术手段,该系统还具有基站布置灵活、成本低、无盲区等优势,所以具有很好的市场前景。
在繁忙的大型机场,由于存在飞机、摆渡车、行李车等多种移动目标,使得监视场景更加复杂,并且部分区域存在建筑物遮挡等原因使一次雷达存在监视盲区,不能完全覆盖。随着技术的发展,无源多点定位监视系统的出现,很好地解决了上面所述繁忙机场的一次场面监视雷达系统的问题,实现了对飞机、车辆等目标的定位和识别,改善了繁忙机场的场面监视能力[2-3]。尤其是当处于严格管控场合或者受气候影响能见度较低的时候,此系统的性能将变得尤为突出,它使得操作人员完全掌握每架飞机和每辆车的精确位置,防止跑道上的各种潜在的碰撞,增强了安全性。除此之外,无源多点定位监视系统同时支持接收多路自适应监控广播(ADS-B)信息。
目前,国际民航组织已将无源多点定位监视系统作为空管系统中新的监视技术。在西方等多个国家和地区已被用于场面、进近区域的监视。如国外的Sensis、Rannoch、奥姆尼等公司研发的MDS系统已投入运行。
2 定位原理
2.1 定位原理
无源多点定位监视系统采用1个主站和n个副站构成的长基线时差定位体制。时差(TDOA)定位又称为双曲线定位,它是通过处理多站接收到的待定目标信号到达时间差实现对目标的定位。从数学角度来看,到达时间差对于2个天线来说在二维情况模式下可以将目标的方位对应到一个双曲线上。当4个接收站都检测到飞机信号的时候,就可以通过计算其中每2个双曲面的交点来得出飞机的三维方位。当只有3个接收站检测到飞机信号的时候,三维方位不能直接算出,但如果目标的高度可以通过其他途径获得(例如 从C模式应答),那目标的方位就可以计算了。但这个结果通常是参考了二维的计算结果。而且必须注意的是,用海拔高度(C模式)来计算会导致其结果没有双曲面来得精确,因为海拔高度和地理高度还是有很大差异的。如果多于4个站检测到飞机信号,那么可以获得额外的信息来对方位计算结果进行校准,以降低误差。
假设有基于1 090 GHz频段的3个接收机被放在不同的地方F1,F2,F3,从飞机上传回的应答信号同时被2个接收机收到,3个接收机都能测量同一信号到达的时间差。将F1和F2作为双曲线的焦点,并将目标点设定在双曲线上,它与F1和F2、F3之间的距离分别为d1、d2和d3,2条双曲线产生一个交点即为目标位置。在实际情况下,计算是通过用双曲面来代替双曲线,目标的位置被定位在一个水平面上的2个双曲面的交点。其到达时间差示意图见图1。

图1 到达时间差示意图
无源多点定位监视系统由1个主站和n个副站构成,下面以4站为例进行说明,定义n=3,各定位站的空间位置为:(xi,yi,zi)T,i=0,1,2,3,其中i=0表示主站,i=1,2,3 表示副站,待定目标位置为(x,y,z),ri表示目标与第i站之间的距离,Δri(i=1,2,3)表示目标到第i站的距离与目标到主站之间的距离差,则定位方程为[1]:
(1)
式中:i=1,2,3。
化简式(1)得到:
AX=F
(2)

可以采用伪逆法解式(2),得:
X=(ATA)-1ATF
(3)
2.2 典型系统配置
在工程研制时机场场面无源多点定位系统组成一般包括1个中心接收站(CRS)、若干个辅助接收站(SRS)、1个信息处理中心(CPS)、若干个站间通信系统[4-6]。
接收基站包括全向天线接收处理设备、信号预处理设备、站间通信终端、电源设备等。
信息处理中心包括目标数据处理机、显示终端、站间通信终端、电源设备以及其他辅助设备等。
站间通信系统包括可选择光缆(光端机)。
为了提高系统数据的更新速率,建议适当配置几个询问发射站。
为了精确校正系统时延,消除环境的慢变化所引起的系统时延的变化,系统需要增加1个信号校正站,一般情况下系统校正站和询问站可以复用。
典型系统配置图如图2所示。

图2 典型系统配置图
3 关键技术研究
机载应答信号是实现多点定位被动监视的主要信号来源之一。同样,在机场的摆渡车、行李车上可以安装机载应答设备或自适应相关广播(ADS-B),通过多点定位监视系统实现目标的实时监视。目前民航机载应答机发出的应答信号包括MARKX、MARKXⅡ、S模式信息以及ADS-B信息。这些信号的频率都是1 090 GHz,要实现对目标的定位,首先必须对其信号结构进行研究。
3.1 MARKX、MARKXⅡ应答信号的研究
国际民航组织对应答信号作了统一规定。MARKXⅡ模式兼容MARKX。MARKX、MARKXⅡ询问一共有6种模式,分别为1,2,3/A,B,C模式。其中模式1、2专用于军用识别询问,3/A模式兼用于军用识别和民用识别,C模式用于高度询问,D模式作为备用询问模式,它们的应答格式如图3所示。

图3 A/C模式应答信号格式
由上面的应答信号格式可知:A模式代码和C模式高度代码的脉冲形式完全相同,地面雷达系统因知道询问模式,所以很容易实现应答脉冲的模式识别,而在多点定位系统中,因不接收询问信息,因此无法知道收到的应答信息是A模式或C模式信息,在系统完成定位的过程中如何识别接收信息是A模式还是C模式就显得非常关键。
本文提出一种针对无源多点定位监视系统中所接收的应答机A模式代码和C模式高度代码信号的识别方法,该方法根据航管雷达A、C模式编码规则和应用的物理意义[4]以及民航机场监视的实际情况,解决了无源多点定位监视系统中地面接收机所收到的A/C 模式应答信号的识别问题。
(1) 当应答器响应3/A模式(即身份模式)询问时,应答码则代表身份信息,排序为A4A2A1、B4B2B1、C4C2C1、D4D2D1。
(2) 当应答器响应C模式时,应答码则代表高度码。高度码组成方式与A码完全不同,它的顺序为:D1D2D4、A1A2A4、B1B2B4、C1C2C4。其中Dl到B4按标准循环码(又叫格雷码)编码,它的最小递增单位为152.4 m。
C1到C4按照五周期循环码编码,规定其最小递增单位为30.48 m。
由循环码编码规则可知当D1位为1时,表示的高度大于3 0480 m,目前民航飞机的飞行高度还到不了,因此在民航系统的机载应答信号中D1位恒为0。根据目前我国民航划定5 000 m以上的飞行高度层及对应的英制高度和编码,可知C模式时D4D2D1的解码结果一定为0或4。
低3位(C)的五周期循环码编码规则如表1所示。

表1 C模式应答信息低3位五周期循环码编码规则
具体算法如下:
(1) 将接收到的12 bit信息由高位到低位按照 A4A2A1 B4B2B1 C4C2C1 D4D2D1 的顺序排列,并检查特别位置识别码(SPI)脉冲是否出现,如果SPI脉冲出现,则可判定该信息为A模式识别代码,识别算法结束,否则进入下一步;
(2) 如果结果为7 500、7 600、7 700 3种危急信息之一时,判定该信息为A模式识别代码,且为危急信息代码,识别结束,否则进行下一步;
(3) 由表1可知C4C2C1的解码结果C为0、5、7之一时,判定该信息为A模式识别代码,识别算法结束,否则进行下一步;
(4) 如果D4D2D1的解码结果D为1、2、3、5、6、7之一时,判定该信息为A模式识别代码,识别结束,结果为0、4之一时,进行下一步;
(5) 根据物理特性,在机场附近起降区域内飞机处于起降阶段的特点,飞机应答信息的A模式代码固定不变,而C模式代码是不断变化的,采用定时统计的方法来进行区分。
(6) 最后系统融合S模式中相关信息进行确认。
3.2 S模式信号及ADS-B信号研究
二次雷达的S模式是在二次雷达的传统模式基础上发展起来的。在二次雷达中引进了地址选择的询问/应答概念,即规定在全世界范围内任何一架飞机的编码地址是唯一的,这就从根本上克服了窜扰现象,使得雷达可以对被监视的飞机进行有选择的询问。
自动相关监视(ADS-B)技术是近几年技术发展所带来的最重要的成果,是国际上解决空中交通管制、自由飞行最有效的方法[7]。广播式自动相关监视(ADS-B)是一种基于全球卫星定位系统(美国的GPS、我国的北斗系统等)数据链通信的监视技术[8]。ADS-B能够集成目标本机的身份编码、三维位置、速度信息、加速度信息、地空标志信息、飞行意图等信息,利用数据链通信的方式,实时、自发、间歇性地对外广播这些导航信息,在地面就可以捕捉到这些信息。最大ADS-B消息发射频率不会超出每秒6.2个消息、平均每秒2个空中位置、2个空中速度、0.2个身份以及2个事件消息[6]。为了避免获得虚假的方位信息,系统优先采用全局模糊定位解码算法。S模式和ADS-B信号的格式如图4所示。
在多点定位系统中可利用的S模式和ADS-B应答信号作用具体见表2,其中DF表示下载数据格式。

图4 S/ADS-B信号的格式
表2 S模式和ADS-B应答信号编码格式

S模式扩展振荡器(ADS⁃B)DF=17地标,海拔或者卫星定位高度,ADS⁃B方位,ICAO识别S模式扩展振荡器(ADS⁃B)DF=18地标,海拔或者卫星定位高度,ADS⁃B方位,ICAO识别S模式空中防撞系统DF=0地标,海拔高度S模式空中防撞系统DF=16地标,海拔高度,空对空坐标S模式监控DF=4地标,海拔高度S模式监控DF=5地标,A模式识别S模式监控DF=20地标,海拔高度,数据链S模式监控DF=21A模式识别,地标,数据链
在多点定位系统中时差的采样利用的是4个导前码信号,具体信息可以用来进行数据的相关和融合。
3.3 信号的预处理
本系统采样动态门限抑制多路径反射信号,一般接收机的浮动门限取脉冲信号幅度的一半,由于本系统运用在机场作为场面监视设备时信号的多路径干扰较为明显,多路径干扰信号一般都出现在直射接收信号之后,因此本系统采用一种全新的门限来抑制这类多路径干扰。原理图如图5所示。

图5 信号预处理原理图
3.4 航迹跟踪处理
信息在传送、处理的各个环节中不可避免地会引入误差,从而引起目标定位信息的丢失和错误。因此,系统需要对定位点迹进行处理,可选择滤波器对目标进行滤波估计的方法来提高系统的整体性能。可选择的滤波器有a、β或Kalman滤波器,由滤波器的特性可知:当目标做匀速直线运动时,a、β滤波器在稳态时和Kalman滤波几乎是等效的;但是在暂态过程中,或者目标做机动飞行(转弯等)时,Kalman滤波器的综合性能要优于a、β滤波器。根据无源多点定位监视系统目标经常需要机动的特点,本文提出选择Kalman滤波器。滤波的目的就是目标过去和现在的状态进行平滑,同时预测目标未来时刻的运动状态信息,包括目标的位置信息和速度信息[9]。航迹跟踪处理模块实现针对原始测量报告的航迹维护,航迹跟踪处理流程如图6所示。
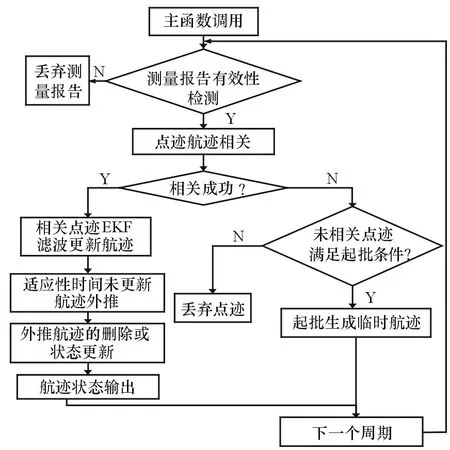
图6 航迹跟踪处理流程图
验证机场监视系统经Kalman滤波器航迹跟踪处理后的典型航迹如图7所示。

图7 验证机场监视系统航迹
4 结束语
通过以上关键技术的研究,解决了系统被动监视过程中虚警率高的问题,保证了航迹的连续性,解决了现有场面一次监视雷达系统固有的无标识、覆盖盲区等问题,实现了对飞机、车辆等移动目标的精确定位和识别,改善了大型、繁忙、建筑物遮挡机场的场面监视能力,为装备研制奠定了技术基础。
[1] 赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,1999.
[2]PiracciEG,PetrochilosN,GalatiG.MixedSSRsourcesseparationexploitingsparsity:ageometricalapproach[A].RadarConference,2009.EuRAD2009[C].European,2009:450-475.
[3]PetrochilosN,GalatiG,PiracciE.SeparationofSSRSignalsbyArrayProcessinginMultilaterationSystems[J].IEEETransactionsonAES,2009,45(3):965- 982.
[4] 黎廷璋.空中交通管制机载应答机 [M].北京:国防工业出版社,1992.
[5]MH/T4010-2006.空中交通管制二次监视雷达设备技术规范[S].
[6]MH/T4037-2013.多点定位系统通用技术要求[S].
[7] 张天平,郝建华.ADS-B在空中交通管制中的应用与发展[J].电子元器件应用,2009(7):74-80.
[8]DO-260A-V2RTCA.MinimumOperationalPerformanceStandardsfor1 090MHzExtendedSquitterAutomaticDependentSurveillance-broadcast(ADS-B)[S].
[9] 何友,修建娟,张晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2006.
Research into Passive Multi-point Location System of Airport Surface
SHEN Jin-liang
(The 51st Research Institute of CETC,Shanghai 201802,China)
Multilateration (MLAT) is a new target surveillance technique,can be extended for airport surface,approach and enroute(wide area MLAT (WAM)) target monitoring.This paper studies the principle and basic concept of airport surface MLAT monitoring system,brings forward a method to perform signal pre-processing against system multi-path interference,identification of mode A/C response signals and track management,which resolves the problem that the false alarm ratio is high in the course of passive monitoring,guarantees the track continuity.Combining with engineering test validation,the diagram is optimized,typical system configuration,field deployment and validating airport surveillance track diagram are given,which lays the technical foundation for the equipment development.
Multilateration system;response signal;identification
2014-07-29
TN971.1
A
CN32-1413(2015)01-0013-05
10.16426/j.cnki.jcdzdk.2015.01.003