基于激光干涉的大角度高精度在线测角方法研究
2018-10-18,
,
(北京空间机电研究所,北京 100094)
0 引言
扫描式遥感器利用光学反射原理,将入射光引入主光学系统来扩大观测视场。在今后相当一段时间仍然保留着广阔的发展空间[1-2]。为了满足越来越多型号需求所提出的高性能要求的扫描式遥感器,遥感器扫描系统的测角精度要求不断提高,已经达到角秒级。测角方法决定整个系统的性能是否真正达到要求,因此,高精度大角度在线测角成为验证扫描系统精度的关键技术。
众所周知,干涉技术在精密测量中已获得了非常广泛的应用,特别是激光技术的出现及激光技术的发展,使这项技术在精密测量中的应用突破了以往由于缺乏亮度高、单色性好的光源的局限性,大大地促进了干涉仪在测量中的应用,从而使利用光波干涉技术进行测量逐渐成为科研与生产中精密测量的主要手段之一[3]。目前常用的激光干涉测角设备为雷尼绍生产的激光干涉仪,其测角范围最大可达±5°,测角精度可达0.03″,国内各计量单位均采用该设备作为高精度测角计量标准;其反射镜组件结构尺寸大、重量大,无法安装与被测设备进行在线检测[4]。本文提出了一种基于激光干涉测长技术的高精度大角度在线测角系统,对测角设备误差进行检定,阐述了测角系统的组成、工作原理,并对系统测角误差进行分析[5-6]。
1 系统结构及原理
本红外遥感器中扫描系统摆角范围为±5.8°,扫描镜采用挠性枢轴支撑,采用180对极绝对圆式感应同步器作为反馈测量元件,感应同步器本身的精度优于1"。在观测视场范围内扫描镜的扫描速度为匀速5°/s,通过分析计算,扫描镜的最大摆角为±5.8°。定义从-5.8~+5.8°为一个帧时,为2.5 s。高精度扫描系统的测角精度要求优于1",采用位置伺服控制实现高精度控制要求。
为了保证扫描系统的最终测角精度能够达到1",需要对扫描系统测角精度进行静态和动态测试。静态测试是为了保证机构的安装精度满足要求,根据感应同步器误差测试原理,要求以5′为步长对感应同步器测角精度进行检测。动态测试是为了测试扫描系统在工作状态下动态采集角度的精度是否满足使用要求,本红外遥感器系统要求以172 μs时长,感应同步器及测试系统同时进行测角,检测感应同步器测角精度。
针对高精度扫描系统的测试需求,确定采用激光干涉原理对扫描系统测角精度进行测试,其中扫描镜通过挠性枢轴支撑与基座上,感应同步器与电机分别安装与扫描镜轴系两端,测试时将干涉仪反射镜安装与感应同步器转子上,反射镜跟随扫描镜进行摆扫运动,反射镜使得干涉仪发出的激光返回干涉仪并形成干涉条纹,根据干涉条纹的移动量计算出扫描镜摆动角度,系统结构及原理如图1所示。
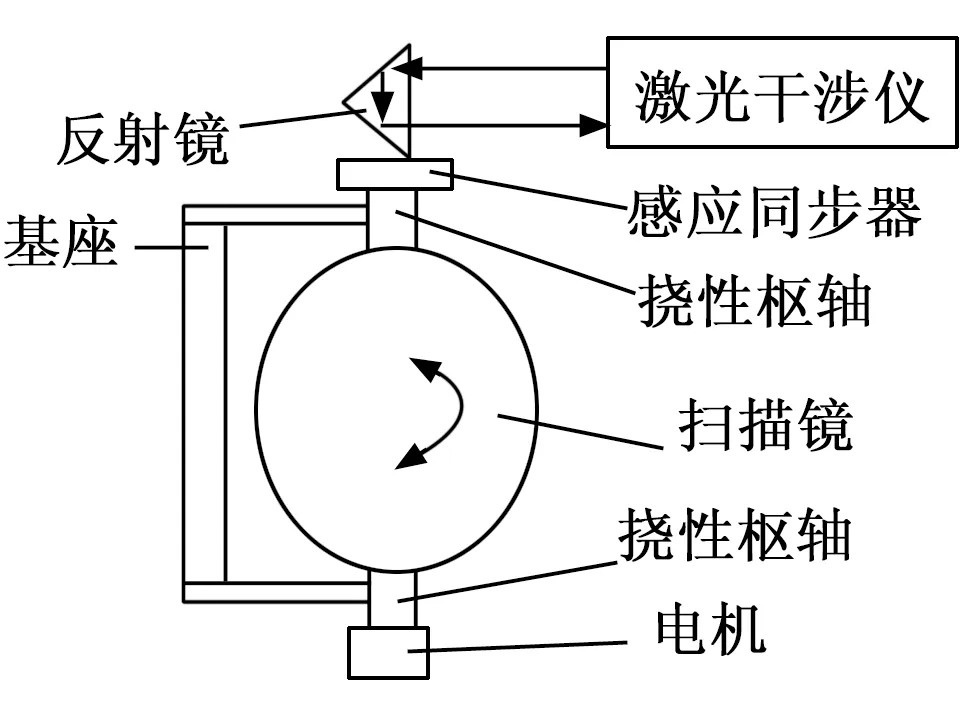
图1 系统结构及原理图
下文阐述本次采用的激光干涉仪的误差检定、高精度大角度在线测试方案及测试误差分析。
2 测角设备介绍及检定
2.1 测角设备介绍
根据对国内外高精度激光干涉仪的调研,德国SIOS公司生产的SP-TR2000型激光干涉仪可开发使用于本次大角度高精度测角,其配置的反射镜组件结构尺寸小、重量轻,可直接实现大角度、高精度、非接触在线测试,可以获得摆动角度、俯仰角度的变化情况。其测距范围为2 000 mm,长度分辨率为20 pm(对应0.1 nm角度分辨率可达0.002角秒),测角范围可达±12.5°以上,配备高速采集卡后采样频率可达10 MHz。
SP-TR2000激光干涉仪工作原理与其他激光测试设备相同,通过测量测试镜组件转动时测试光束1和测试光束2变化距离差L,测试光束1和测试光束2距离为A,计算测试试镜转过的角度θ=asin(L/A)。而为了增大测角范围,将测试镜设计为中空镜或球镜组件,测试镜如图2所示。
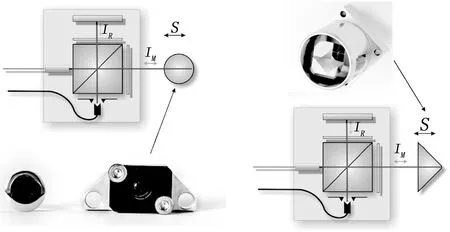

图2 SP-TR2000激光干涉仪测试镜组件
2.2 测角设备检定
由于SP-TR2000型激光干涉仪厂家出厂前只对测距精度进行检定,没有对其测角精度进行检定,故在计量院对SP-TR2000型激光干涉仪测角精度进行检定,以雷尼绍激光干涉仪+RT300 (KUNZ)转台作为检测系统。其中雷尼绍激光干涉仪测角范围为±5°,测角精度为0.03″;RT300转台测角范围为360°,测角精度为0.25″。参照计量院《激光小角度测量仪检定规程》对SP-TR2000型激光干涉仪测角精度进行检定。SP-TR2000型激光干涉仪放置在光学支架上,反射镜组件放置在转台上,要求反射镜组件与转台同轴度小于φ0.3 mm,检测系统搭建如图3所示。
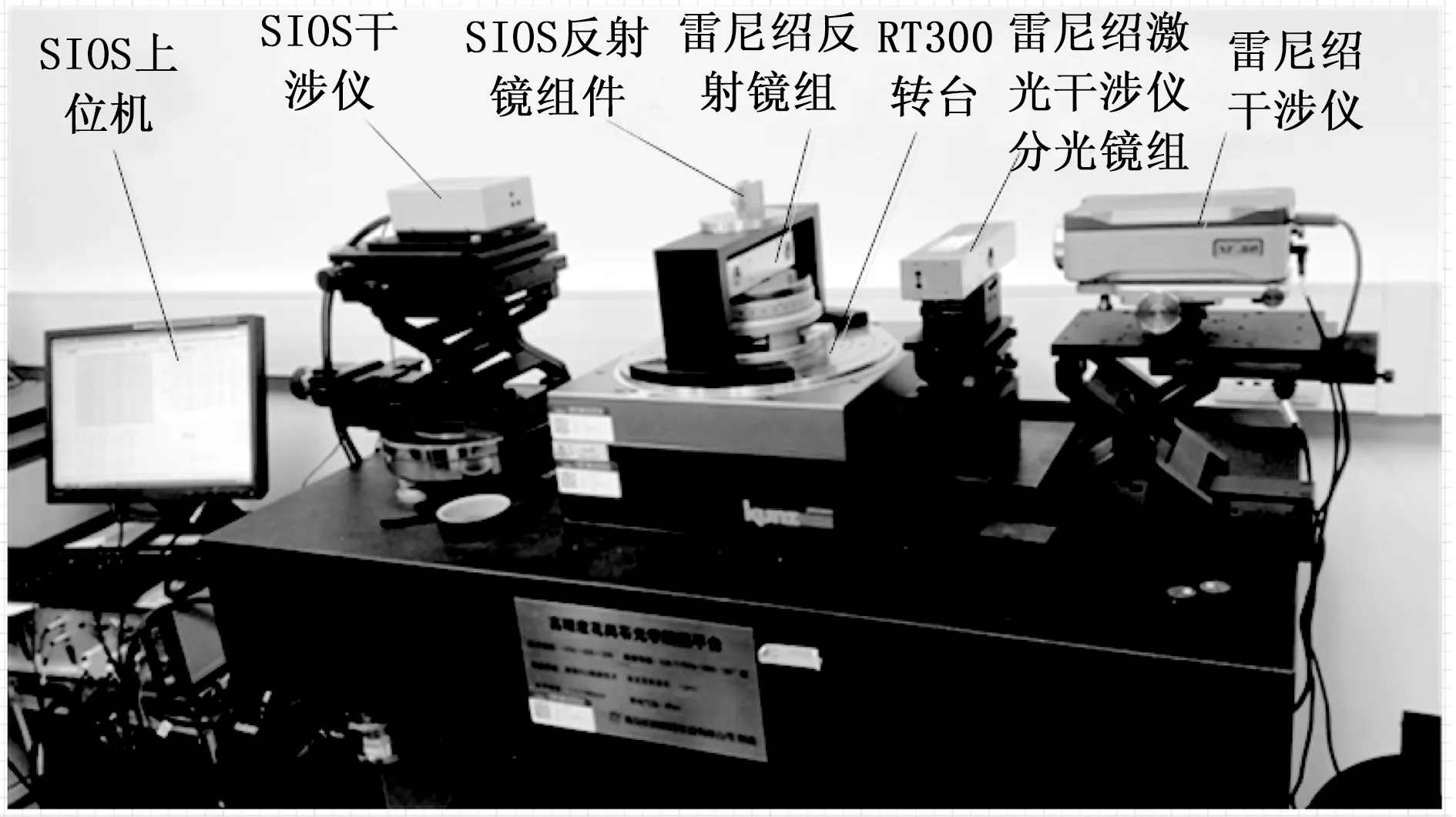
图3 SP-TR2000型激光干涉仪检定
2.2.1 漂移检定
将SP-TR2000型激光干涉仪如图2安置,调整其显示值处于零位附近,记录显示值,静止不动观测2 h,每30 min记录一次,取任意1 h内最大值为检定结果。经检定,SP-TR2000型激光干涉仪漂移误差σ1为0.06″。
2.2.2 测角重复性检定
将SP-TR2000型激光干涉仪如图2安置,将转台转动某一位置定位,从SP-TR2000型激光干涉仪读数ai,然后转台转动一固定角度,读数bi,重复测量10次,采用公式(1)计算其重复性S。
di=bi-ai
(1)

经检定,SP-TR2000型激光干涉仪测角重复性S为0.08″。
2.2.3 零起分度误差检定
检定其5°时的零起分度误差,将SP-TR2000型激光干涉仪如图2安置,SP-TR2000型激光干涉仪示值清零,顺时针转动转台5°,读取干涉仪示值c1,然后转台反转至干涉仪示值为零,再将转台逆时针转动5°,读取干涉仪示值c2,c1与c2的绝对值之差应不大于0.00001°,否则应重新调整初始零位角。重新调整时比较c1与c2的绝对值,角度值小的方向为初始零位角方向。按所判定的调整方向转动转台,调整干涉仪的初始零位,重新清零后重复上述测量,直至c1与c2的绝对值之差应不大于0.00001°,此时的零位作为测量分度误差时的最近初始零位。
初始零位确定后,进行零起分度误差测量。在此位置上将SP-TR2000激光干涉仪清零,并读数a01,转台顺时针转动5°,读数为a5.1,然后转台返回零位后在逆时针转动5°,读数为a5.2,转台再转回零位,读数为a01’,此为1组测量,若回零误差大于0.00001°,则重测,反复测量24次。则5°零起分度误差按公式(2)计算:
|a5.1-a01|=b5.1
|a5.2-a01|=b5.2
…
|a5.23-a012|=b5.23
|a5.24-a012|=b5.24
(2)
经检定,SP-TR2000型激光干涉仪5°零起分度误差Δ05为0.1″。
2.2.4 反射镜间距检定
SP-TR2000激光干涉仪主要是用于高精度测距,本项目开发用于高精度测角使用,故需要对反射镜间距进行高精度标定。由干涉仪测试原理可知,其测得角度是根据两束激光L1和L2长度差及反射镜距离A,根据公式(3)原理计算得来,反射镜距离A直接影响干涉仪的测角精度。
(3)
当干涉仪初始入射角调整完成后,以雷尼绍干涉仪作为基准,转台在±5°,记录SP-TR2000激光干涉仪示值±θ,此时若干涉仪示值θ不是5°,则微调SIOS激光干涉仪上位机软件中激光束距离A的值,直至其测角精度达到0.2″以内,以该距离A作为干涉仪后续高精度测角的计算值。则干涉仪反射镜间距带来的测角误差σ2为0.2″。
2.2.5 SP-TR2000激光干涉仪测角误差分析
由检定结果可知,干涉仪测角系统误差主要包括示值漂移、测角重复性、零起分度误差及反射镜间距误差,且误差来源互不相关,故干涉仪测角误差为各项误差的均方根值。
(4)
由公式(4)计算可知,SP-TR2000激光干涉仪系统测角精度σ为0.245″,可满足本扫描系统测角精度1″的测试要求。
3 在线测试方案
3.1 在线测角系统
采用SP-TR2000激光干涉仪对扫描系统测角精度进行测试,由于扫描系统作为被测设备,无法通过扫描系统反馈角度调整SP-TR2000激光干涉仪初始入射角,故需要调整激光器角位置来调整初始入射角,作为测试零位基准。其中扫描系统转轴竖直放置于测试平台上,反射镜组件安装与扫描镜转轴上,通过工装保证反射镜组件与转轴同轴度小于φ0.3 mm。将SP-TR2000激光器放置于高精度转台上,干涉仪主机及电脑放置于测试桌上,扫描装置角度精度测试系统如图4所示。
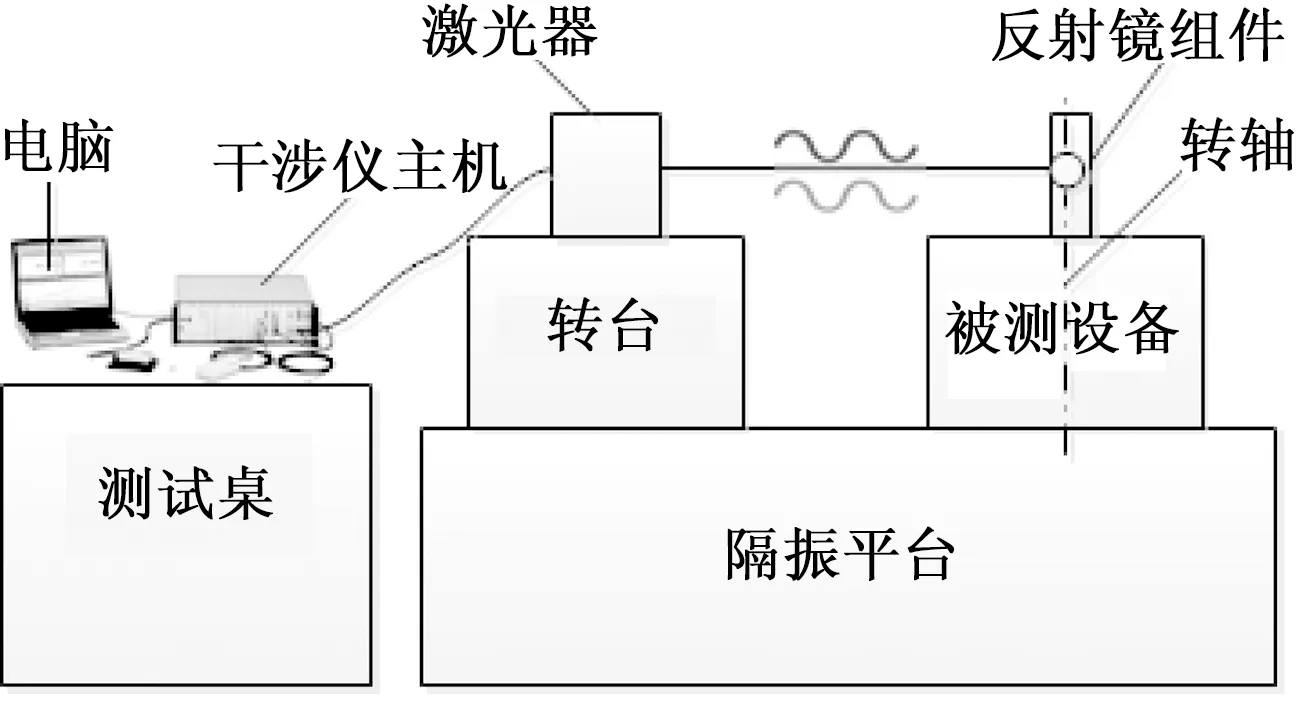
图4 大角度高精度在线测角系统
调整初始入射角:1)采用自准直仪+360齿多齿分度台作为初始入射角基准,扫描系统在物理零位(扫描镜摆扫的中间位置),自准直仪清零作为基准,并将此时扫描系统中感应同步器测得的角度作为扫描零位;2)调整扫描系统角度位置,将扫描系统固定在自准直仪测得的±5°处;3)采用高精度转台调整激光器角位置,使得SP-TR2000激光干涉仪在±5°时测得角度也为±5°(±0.001°);4)在扫描系统物理零位处将SIOS激光干涉仪清零,以此零位作为测试系统初始零位。
3.2 在线静态测角方案
静态精度测试时,如图3所示完成测试系统搭建及初始入射角调整后,根据感应同步器误差测试原理,要求以感应同步器实测角度5′为一个步长,采用高精密涡轮蜗杆调节机构手动调节扫描机构的转动角度,转动角度φi,±5°内共240个测试点,记录SP-TR2000激光干涉仪示值θi,±5°范围所有点测试完成后,将扫描机构转回物理零位,若此时干涉仪示值不是零,则重测,反复测量3次,扫描系统测角误差为|θi-φi|。
根据测试结果绘制误差曲线,可根据该误差曲线采取曲线拟合或线性插值的方式对扫描系统测角精度进行补偿,补偿后再根据上述方法进行静态测角,检测扫描机构系统静态测角精度是否满足设计要求。
3.3 在线动态测角方案
要求SP-TR2000激光干涉仪和扫描系统中测角系统同步测角,以172 μs时长,测量扫描系统动态测角精度。同步测角方法:扫描系统由扫描伺服控制器进行扫描运动,由扫描系统给干涉仪发送同步采样触发信号,触发信号以高电平形式输出给干涉仪,此时扫描测角系统与干涉仪按照该触发信号同时采样,实现动态角度精度检测。
4 在线测角系统误差分析
由上述测角方案可知,在线测角系统主要误差主要来源于:1)SP-TR2000激光干涉仪初始入射角对测角精度的影响;2)干涉仪测角精度。
4.1 初始入射角对测角精度的影响分析
在线测试系统初始入射角采用自准直仪+多齿分度台来校准,并采用高精度转台来调整初始入射角。其中自准直仪校准精度为0.25″,多齿分度台校准精度为0.3″,高精度转台位置精度为1″,初始入射角调节精度为3.6″,且上述误差均不相关,则在线测试系统初始入射角总误差θ0可达3.76″。由SIOS激光干涉仪测角原理可知初始入射角对测角精度的影响根据公式(5)计算:
(5)
其中:dθ为初始入射角造成的误差,dh'为两个反射镜转动后的光程差,L为反射镜间距,θ0为初始入射角总误差,则根据公式(5)可知,初始入射角带来的测角误差dθ为0.03″。
4.2 干涉仪测角精度
SP-TR2000干涉仪由计量院长度所进行检定,其测角精度σ为0.245″。
4.3 在线测角系统误差分析
由上述误差分析可知,该测试系统中各项误差并无关联,故在线测角系统误差按照各项误差的均方根值进行计算。
由上述误差来源及误差结果分析可知,采用SP-TR2000激光干涉仪搭建的在线大角度高精度测角系统测角误差为0.247″,可满足扫描系统中1″的测角精度测试需求。
5 结论
为了实现本红外遥感器对大角度、高精度扫描系统测角精度的在线测试,根据对国内外高精度、大角度测角设备的调研结果,本文提出了一种基于SIOSSP-TR2000激光干涉仪作为测角设备的高精度、大角度在线测角方法,对该测角设备测角精度进行了检定。根据项目需求搭建了在线测角系统,形成在线静态及动态测角方案,并对该在线测角系统的测角误差进行了分析。为高精度、大角度在线测角提供了一种新方法。