挖掘机载机整机挖掘力刚体动力学分析
2011-09-05祖英利于洪洋
祖英利,黄 瑞,于洪洋
(1. 上海第二工业大学实训中心,上海 201209;2. 空军航空大学航空机械工程系,长春 130025)
挖掘机载机整机挖掘力刚体动力学分析
祖英利1,黄 瑞1,于洪洋2
(1. 上海第二工业大学实训中心,上海 201209;2. 空军航空大学航空机械工程系,长春 130025)
以轮式WZ30-25型液压挖掘装载机为实例,基于多刚体系统动力学理论,在三组反铲机构液压缸的运动作用下,研究了挖掘装载机整机系统在铲斗斗齿切向产生的挖掘力响应。在斗杆液压缸挖掘和铲斗液压缸挖掘两种工况下,进行了挖掘力响应分析。在各工况下,影响挖掘力的重要参数有很多,包括液压系统的压力、液压缸的尺寸、各液压缸间的相互作用力、整机稳定性和地面附着性能。将推导这些因素和最大挖掘力之间的函数关系。
动力学;刚体动力学;挖掘装载机;挖掘力
0 引言
挖掘装载机以正铲和反铲两种形式做挖掘运动,可实现地平面上和地平面下的挖掘运动。挖掘机构的挖掘力主要取决于液压系统的压力和液压缸的尺寸,以及各液压缸间作用力的影响,还受整机稳定性和附着性的影响。整机挖掘力是指当反铲机构作业时在铲斗齿尖上发挥的最大挖掘力响应,是衡量反铲机构挖掘性能的重要指标之一[1-2]。关于挖掘力的标准定义可参照ISO 6015∶1989(E)和ISO 7135∶1993。对怎样正确计算与理解整机挖掘力对挖掘装载机的影响进行研究是非常重要的[3-4]。本文以轮式WZ30-25型挖掘装载机为实例,基于多刚体系统动力学理论,在三组反铲机构液压缸的运动作用下,研究挖掘装载机整机系统在铲斗斗齿接触点上产生的挖掘力响应。
1 机械系统整机建模
反铲机构工作时,既可用铲斗液压缸挖掘,也可用斗杆液压缸挖掘,或作复合动作挖掘。一般认为,在斗容量小于3
0.5 m或在土质松软时以铲斗液压缸挖掘为主,反之,以斗杆液压缸挖掘为主,参见图1。
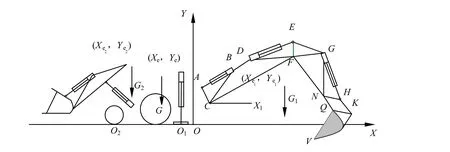
图1 WZ30-25整机机械系统简图Fig.1 The mechanical system diagram of WZ30-2
和XO2
。
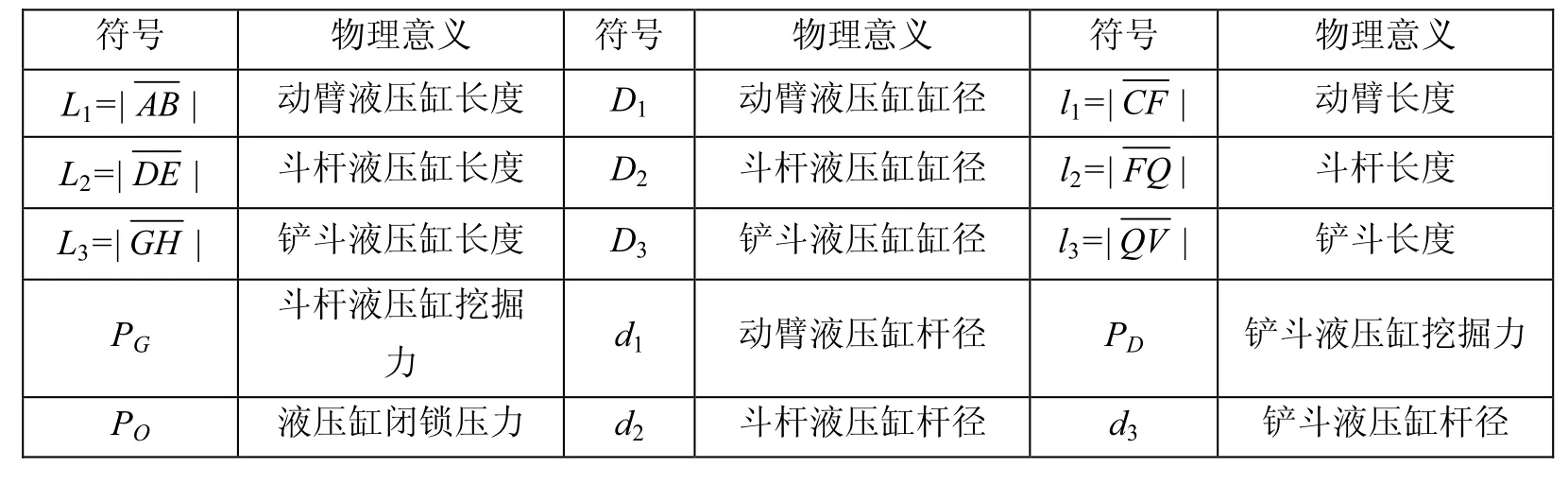
表1 挖掘机构动力学分析中的参数Tab. 1 backhol parameters of dynamic analysis
2 工况Ⅰ:斗杆液压缸挖掘作业
在给定工况(L1, L2, L3)的情况下,计算斗杆液压缸的实际挖掘力时,应当考虑到下列因素的影响:1) 动臂液压缸闭锁能力对斗杆液压缸挖掘力的限制;2) 斗杆液压缸主动挖掘力的限制;3) 铲斗液压缸闭锁能力对斗杆挖掘力的限制;4) 整机向前倾翻对斗杆液压缸挖掘力的限制;5) 整机向后倾翻对斗杆液压缸挖掘力的限制;6) 整机对地面的前后滑移对斗杆液压缸挖掘力的限制。
2.1 动臂液压缸闭锁力限制的最大斗杆挖掘力PG1
液压缸闭锁力是指挖掘工况下某些液压缸被动状态所能承受的作用力,是挖掘力发挥的重要影响因素之一,如图1和图2所示。

图2 斗杆液压缸挖掘力的动力学分析简图Fig.2 The dynamics analysis diagram of arm cylinder digging force
根据F和V点的坐标(XF,YF)和(XV,YV),可知

当CVF∠≤90°时,动臂液压缸小腔受压,此时小腔闭锁力对C点产生的力矩为

有关重量对C点产生的力矩为

所以

当CVF∠>90°时,动臂液压缸大腔受压,此时大腔闭锁力对C点产生的力为

所以

2.2 斗杆液压缸主动挖掘力PG2
斗杆液压缸主动力对F点产生的力矩为

有关重量对F点产生的力矩为

2.3 铲斗液压缸闭锁力限制的最大斗杆挖掘力PG3
如图1和图2所示,对于

当FVQ∠≤90°时,铲斗液压缸大腔受压,此时大腔闭锁力对Q点产生的力矩为

i3为铲斗连杆机构的总传动比,

有关重量对Q点产生的力矩为

所以

当FVQ∠>90°时,铲斗液压缸小腔受压,此时小腔闭锁力对Q点产生的力矩为

所以

2.4 整机向前倾翻限制的最大斗杆挖掘力PG4
对于△FVO1,有


所以

2.5 整机向后倾翻限制的最大斗杆挖掘力PG5
如图1和图2所示,对于△FVO2,有

显然,当∠FVO2≥90°时,斗杆挖掘时整机不可能产生后倾翻,只有当∠FVO2<90°时,才有可能出现后倾现象。各部件重量对O2点产生的力矩为

所以

2.6 整机滑移限制的最大斗杆挖掘力PG6
参见图2,设FV联机对水平线的夹角为2β,则

在该工况下斗杆液压缸挖掘时,

3 工况Ⅱ:铲斗液压缸挖掘作业
参见图3,已知条件与计算斗杆液压缸实际挖掘力的已知条件相同。在给定工况(L1, L2, L3)的情况下,计算铲斗液压缸的实际挖掘力与计算斗杆的实际挖掘力一样,应当考虑下列因素对铲斗挖掘力的影响:1) 动臂液压缸闭锁能力对铲斗挖掘力的限制;2) 斗杆液压缸闭锁能力对铲斗挖掘力的限制;3) 铲斗液压缸主动挖掘力的限制;4) 整机向前倾翻对铲斗挖掘力的限制;5) 整机向后倾翻对铲斗挖掘力的限制;6) 整机对地面的前后滑移对铲斗挖掘力的限制。
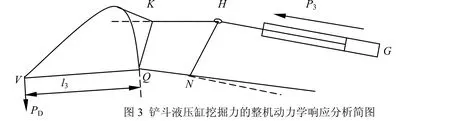
图3 铲斗液压缸挖掘力的整机动力学响应分析简图Fig.3 The dynamics analysis response diagram of bucket cylinder digging force
3.1 动臂液压缸闭锁力限制的最大铲斗挖掘力PD1
如图1和图2所示,根据前面提到的几何尺寸计算,可以求出工作装置上每一个铰点的坐标值。对于△CQV,有

当CVQ∠≤90°时,动臂液压缸小腔受压,此时小腔闭锁力对C点产生的力矩为

有关重量对C点产生的力矩为

所以

当∠CVQ>90°时,动臂液压缸大腔受压,此时大腔闭锁力对C点产生的力矩为

3.2 斗杆液压缸闭锁力限制的最大铲斗挖掘力PD2
如图1和图2所示,对于△FVQ,有

当∠FVQ≤90°时,斗杆液压缸大腔受压,此时大腔闭锁力对F点产生的力矩为

有关重量对F点产生的力矩为

当∠FVQ>90°时,斗杆液压缸小腔受压,此时小腔闭锁力对F点产生的力矩为

所以

3.3 铲斗液压缸主动挖掘力3DP
如图1和图2所示,铲斗液压缸主动力对Q点产生的力矩为

有关重量对Q点产生的力矩为

所以

3.4 整机向前倾翻限制的最大铲斗挖掘力4DP
参见图1,对于△QVO1,有

显然,当∠QVO1≤90°时,铲斗挖掘时整机不可能产生前倾翻,只有当∠QVO1>90°时,才有可能出现前倾现象。各部件重量对O1点产生的力矩为

所以

3.5 整机向后倾翻限制的最大铲斗挖掘力5DP参见图1,对于△QVO2,有

显然,当∠QVO2≥90°时,铲斗挖掘时整机不可能产生后倾翻,只有当∠QVO2<90°时,才有可能出现后倾翻现象。各部件重量对O2点产生的力矩为

所以

3.6 整机对地面的前后滑移限制的最大铲斗挖掘力6DP
如图1和图2所示,设QV对水平线的夹角为

铲斗液压缸的实际挖掘力

4 结论
本文讨论了整机挖掘力与多刚体动力学的关系。其实,整机挖掘力还与机构材料的强度、大气的流向和速度、被挖掘的土层或其他物质的内部状态及液压系统的工作稳定性等实际作业影响因素有关。对挖掘装载机反铲机构的设计而言,在满足作业范围的情况下,要求工作装置的结构布置应合理、紧凑,在保证生产率的前提下,应尽可能提高挖掘力。本文建立挖掘装载机动力学模型,表示出了整机各部件的力与运动之间的关系。在给定工况下,计算得到挖掘力是机构关键点坐标的函数可以通过建立整机数学模型,结合挖掘机构运动学的限制条件,通过调整机构铰接点位置,优化设计整机挖掘力,是建立多目标复杂机械系统优化设计的必要条件[5-6]。
[1] 曹善华主编. 单斗挖掘机[M]. 北京: 机械工业出版社, 1989.
[2] 同济大学主编. 单斗液压挖掘机[M]. 北京:中国建筑工业出版社, 1986.
[3] CAMSELL D. Earth-moving machinery-Hydraulic excavators-methods of measuring tool forces[S]. ISO 6015, 英国: 国际行业标准协会, 1989(E).
[4] CAMSELL D. Hydraulic excavators-terminology[S]. ISO 7135, 英国: 国际行业标准协会, 1993.
[5] 刘惟信. 机械最优化设计 [M]. 北京: 清华大学出版社, 1990.
[6] 祖英利, 孔令恺, 黄瑞. 基于ADAMS的反铲工作装置优化设计研究[J]. 上海第二工业大学学报, 2007, 24(3): 183-188.
Rigid-Body Dynamics Analysis on the Digging Force of Backhoe Loader
ZU Ying-li1,HUANG Rui1,YU Hong-yang2
(1. Practicing and Training Center, Shanghai Second Polytechnic University, Shanghai 201209, P. R. China; 2. Aviation of mechanical engineering, Aviation University of Air force, Changchun 130025, P. R. China)
WZ30-25 backhoe loader was instanced by means of multi rigid-body dynamics theory. The whole system response to tangential digging force on bucket teeth was discussed in action of three sets hydraulic cylinder of backhoe mechanism. At two working conditions of digging with arm cylinder and with bucket cylinder, the digging force was analyzed. At each working condition, many important factors affect digging force. These factors are included the system hydraulic pressure, the dimension of hydraulic cylinder, the interacting force of hydraulic cylinders, the whole system stability and ground adhesive property. The function among these factors and the maximum digging force were inferred in this paper.
dynamics; rigid-body dynamics; backhoe loader; digging force
TH243
A
1001-4543(2011)04-0307-06
2011-05-22;
2011-09-20
祖英利(1976-),女,山东烟台人,讲师,硕士,主要研究方向为重型机械工程车辆,电子邮箱ylzu@pc.sspu.cn。
