机器人辅助空心螺钉内固定治疗股骨颈骨折的效果
2022-02-12刘少华杨匡洋周观明
刘少华,杨匡洋,周观明
(佛山市中医院 骨十科,广东 佛山 528000)
空心螺钉内固定是治疗股骨颈骨折常用的手术方式。精确置入螺钉是获得牢固固定的前提。计算机等技术在骨科中的应用明显提高了螺钉置入的精准度。本研究分析机器人辅助空心螺钉固定治疗股骨颈骨折患者的效果,现报道如下。
1 资料与方法
1.1 一般资料选取2019年1月至2019年12月我院行闭合复位空心螺钉内固定治疗的90例股骨颈骨折患者,分为观察组(48例)与对照组(42例)。观察组男28例,女20例;年龄28~62岁,平均46.5岁;左侧18例,右侧30例;致伤原因:跌倒15例,交通意外23例,高空跌落10例;Garden骨折分型[1]:Ⅰ型3例,Ⅱ型10例,Ⅲ型26例,Ⅳ型9例;受伤至手术时间28~84 h,平均62.5 h。对照组男24例,女18例;年龄30~66岁,平均49.5岁;左侧16例,右侧26例;致伤原因:跌倒12例,交通意外22例,高空跌落8例;Garden骨折分型:Ⅰ型2例,Ⅱ型8例,Ⅲ型24例,Ⅳ型8例;受伤至手术时间32~78 h,平均60.5 h。两组的基本资料比较,无统计学差异(P>0.05),具有可比性。
1.2 手术方法患者在喉罩全麻联合外周神经阻滞麻醉下进行手术,术者为同一组医师。观察组在机器人导航辅助下完成:取仰卧位,患肢固定在牵引架上,健肢呈外展、屈膝、屈髋位;骨折复位满意标准为股骨头、颈之间在正、侧位观察均呈光滑“S”形曲线[2];将机器人标尺安装在机械臂上,将示踪器固定于患侧髂前上棘,调整标尺至恰当位置,操纵C臂机拍摄包含完整股骨头、颈及标尺上10个定位点在内的股骨颈正、侧位图像;采集图像,按照倒品字形规划3枚螺钉的位置、方向及长度,将套筒连接在机械臂上,发出指令将套筒移动至目标位置,沿套筒方向钻入导针,位置适宜后,测量长度,置入合适的螺钉。对照组采用传统徒手经皮空心螺钉内固定术:骨折复位满意后,于C臂机透视下调整入针点,贴近股骨距、与股骨颈轴线方向平行置入第1枚导针,透视导针位置满意后,正位上贴近股骨颈上方皮质,侧位上贴近股骨颈前、后方皮质,平行第1枚导针、呈倒品字形分别置入第2、3枚导针,透视导针位置满意后,测量长度,置入螺钉。
1.3 术后处理术后常规预防感染、抗凝治疗,指导患肢功能锻炼。定期复查X线片,根据骨折愈合情况,指导患者由部分负重逐渐至完全负重行走。
1.4 评价指标①手术时间:观察组从示踪器固定于髂前上棘开始,对照组从置入第1枚导针开始,均至3枚螺钉置入完成;②术中透视次数;③术中导针调整次数:每次调整入针位置或角度都记为1次,不包括单纯调整导针深度;④术中出血量;⑤螺钉平行度:在正、侧位X线片上分别测量3枚螺钉与股骨干、股骨颈解剖轴间的夹角,其相互差的平均值即为螺钉平行度[3];⑥螺钉分散度:在骨折线水平,正位片上测量近端螺钉上缘至远端螺钉下缘间的距离 (d1)及股骨颈的宽度(d2),d1/d2代表螺钉在正位上的分散度[4],以同样的方法测量螺钉在侧位上的分散度。
1.5 统计学方法采用SPSS 17.0统计软件处理数据。计量资料以±s表示,组间比较采用t检验,检验水准α=0.05。
2 结果
2.1 相关评价指标两组的手术时间比较无统计学差异(P>0.05);观察组术中透视次数、导针调整次数、术中出血量显著少于对照组(P<0.01)。见表1。
表1 两组患者的相关评价指标比较(±s)
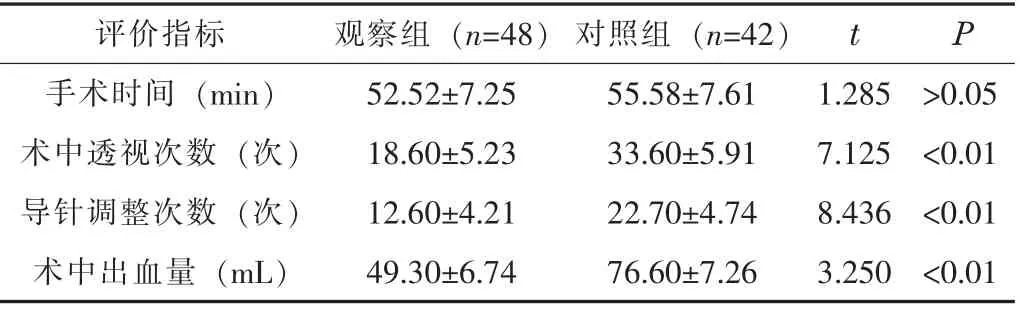
表1 两组患者的相关评价指标比较(±s)
?
2.2 术后影像测量结果观察组螺钉正位、侧位平行度及分散度显著优于对照组(P<0.01)。见表2。
表2 两组患者的术后影像测量结果比较(±s)
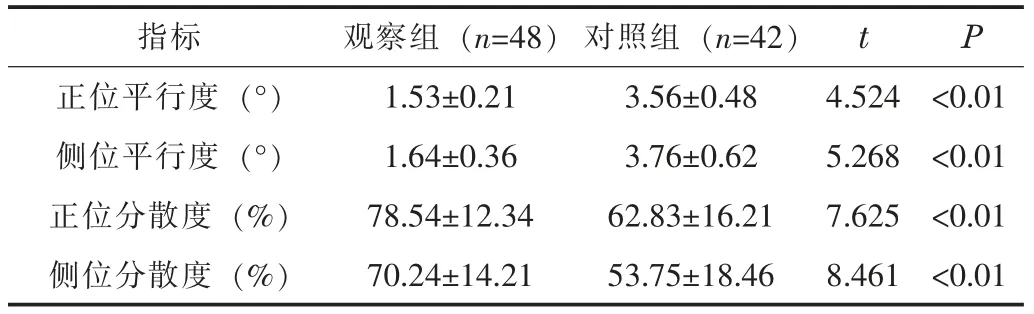
表2 两组患者的术后影像测量结果比较(±s)
指标 观察组 (n=48) 对照组 (n=42) t P正位平行度 (°) 1.53±0.21 3.56±0.48 4.524 <0.01侧位平行度 (°) 1.64±0.36 3.76±0.62 5.268 <0.01正位分散度 (%) 78.54±12.34 62.83±16.21 7.625 <0.01侧位分散度 (%) 70.24±14.21 53.75±18.46 8.461 <0.01
3 讨论
股骨颈骨折是临床常见的一种损伤,约占全身骨折的3.6%,髋部骨折的53%[5]。内固定和关节置换是股骨颈骨折常用的手术方式[6]。空心螺钉具有操作简便、损伤小、保持骨折端持续加压、可靠固定等优点,是目前股骨颈骨折最常用的内固定方式[7]。但因股骨头、颈血供的特殊性,股骨颈骨折内固定术后股骨头坏死、骨不连发生率较高[8]。为了获得最佳固定效果,减少术后并发症发生,精确置入螺钉至关重要。皮质骨质地硬,螺钉置入时应贴近皮质骨以增加其把持力,降低术后螺钉松动率,同时螺钉间应尽可能保持平行,以达到骨折端最大加压。研究[9]表明,所有螺钉与股骨颈轴线之间的角度不能>10°,且任意2枚螺钉间的角度也不能>10°。徒手操作时为提高螺钉置入的精准度,医生需在C臂机透视下多次调整导针方向,不但增加手术时间,且钻孔次数越多,对局部骨质及血运破坏越大,增加术后并发症发生率[10]。机器人辅助置钉在骨科手术中的应用使螺钉精准固定股骨颈骨折成为可能。
本研究中,机器人辅助置钉提高了手术精确度,使螺钉处于最佳位置,降低了术中透视次数及医护与患者的X线暴露量,同时降低了导针调整次数,减少了对局部骨质及血运的破坏。手术时间方面,观察组从示踪器固定于髂前上棘开始计算,对照组从置入第1枚导针开始算,由于需要识别及捕捉示踪器的空间位置信息,规划导针置入路径,两组的手术时间比较无明显差异。螺钉在股骨颈内的分布应尽可能分散,且与股骨颈轴线保持平行。螺钉分散度越高,其产生的抗剪切力、抗旋转力越大,而足够的螺钉平行可实现骨折端的滑动加压,增加骨折端接触应力,利于骨折愈合。本研究中,观察组螺钉平行度及分散度优于对照组。机器人手术操作需要注意:①为减少患者咳嗽、肢体抽搐等自身因素导致示踪器位置改变,需选择喉罩全麻联合外周神经阻滞麻醉;②以股骨头为中心采集图像,C臂机接收器应垂直于患肢,尽可能靠近肢体,以获得包含完整股骨外侧骨皮质、股骨头颈全长及10个定位点在内的清晰图像;③套筒尖端应触及骨皮质,置入导针时动作轻柔,以免坐标空间定位发生改变,降低导针置入精度;④3枚导针置入前均应修正偏差度,及时微调规划路径,争取一次成功。
综上所述,机器人辅助空心螺钉内固定治疗股骨颈骨折能够减少术中透视次数、导针调整次数、术中出血量,提高螺钉置入的精准度,使螺钉布局更合理,是一种安全有效的术式。
