从受拉杆变形浅析弹性力学中的最小势能原理
2021-12-31吴枝根李孝宝詹春晓
吴枝根 李孝宝 孟 增 詹春晓
(合肥工业大学土木与水利工程学院,合肥 230009)
最小势能原理是弹性力学教学中的重点,也是难点。很多教材中,公式推导过程都相当严密,例如:文献[1]在给出总势能的一阶变分等于0 的情况下,进而提出二阶变分大于0,可证明总势能在实际存在的一组位移中取得极小值;文献[2]推导了几何可能位移场的总势能总是大于真实位移场的总势能,用到了应变能密度为正定函数的性质;文献[3]认为只要应变能函数是凸函数,则由凸函数的性质得出一切可能的变形中,真实变形的总势能最小。客观地说,由于问题的复杂性,要想清晰地理解这一原理对于初学者还是有一定的难度。本文从轴向受拉杆的变形出发,简单而直观地揭示最小势能原理所蕴含的机理。
1 线弹性杆的变形分析
如图1(a)所示,弹性杆上端固定,下端自由,杆的长度为l,横截面面积为A,弹性模量为E。当杆的下端悬挂重量为F的重物时,下端向下产生位移u(图1(b)),故弹性杆的弹性势能为
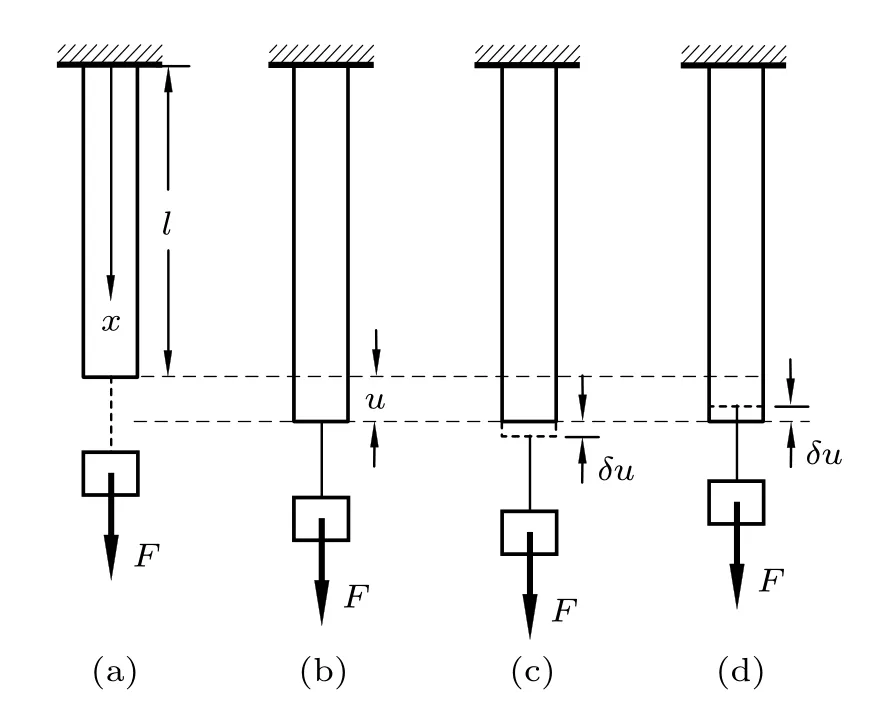
图1 弹性杆及其受重物作用后的变形和虚位移

系统的总势能为Ve+Vp。
现假定弹性杆的下端沿x方向有一个增量,即一个虚位移或位移变分δu(图1(c)和图1(d)),则弹性势能也随之有一个变分δVe,且

由此可见,总势能的变分δ(Ve+Vp) 是位移变分δu的二阶无穷小量,当δu →0 时,δ(Ve+Vp) 的极限等于0,当且仅当δu=0 时总势能变分取得极小值,并等于0。因为δu= 0 对应于实际存在的位移,所以在给定的外力作用下,实际存在的位移使总势能取得极小值,即最小势能原理。
2 非线弹性杆的变形分析
设加载过程中,非线弹性杆下端受到的拉力f与下端的位移uf的关系为
考虑到弹性范围内外力是关于位移的增函数,当δu >0 时,有ξ >u和f(ξ)-f(u)>0;当δu <0时,有ξ <u和f(ξ)-f(u)<0。因此,式(11) 等号右边f(ξ)-f(u)与δu两项总保持相同的正负号,其乘积必大于0,当且仅当δu=0 时其乘积等于零。总势能变分δ(Ve+Vp)是位移变分δu的二阶无穷小量,且在位移变分为零时取得极小值,因此对非线弹性杆的变形分析同样有最小势能原理。
3 基于线弹性应变能的分析
如果考虑弹性受拉杆自身重力,即沿x方向的体力ρg,这时沿x方向的线应变εx是关于x的函数。对于线弹性情况,弹性杆的应变能
应变能的变分

式中δux表示与杆下端位移变分δu对应的x截面的位移变分。
根据虚位移原理,即:如果在虚位移发生之前,弹性体是处于平衡状态,那么在虚位移过程中,外力在虚位移上所做的虚功就等于应力在与该虚位移相应的虚应变上所做的虚功[1],有
因此,在考虑体力和面力的情况下,弹性杆总势能变分是应变变分的二阶无穷小量,在应变变分为零时总势能取得极小值,即为最小势能原理。
4 结束语
(1)通过给出弹性杆在轴向受拉情况下的弹性势能和外力势能以及它们的变分和总势能变分的准确形式,得出:无论是线性还是非线性,其总势能变分都是位移变分或应变变分的二阶无穷小量,只有在位移变分或应变变分等于零时总势能变分才取得极小值,均应验了最小势能原理。
(2)计算外力势能时外力是一个恒定的量,文中采用物体的重力作为外力,将重力势能作为外力势能,便于形成外力势能的概念,避免产生外力随物体变形而改变的思维习惯。
(3)虽然从弹性杆的轴向受力变形解释了最小势能原理,对于一般情况下的最小势能原理具有相同实质,有助于理解最小势能原理的真实含义。
