弹丸高速碰撞过程中靶面三维面形数据获取方法
2020-11-04薛俊鹏张启灿隆昌宇刘元坤龙仁荣
薛俊鹏,张启灿,王 旭,隆昌宇,何 徽,刘元坤,龙仁荣
(1.四川大学 空天科学与工程学院;2.四川大学 电子信息学院:成都610065;3.中国工程物理研究院 流体物理研究所,绵阳621900;4.北京卫星环境工程研究所,北京100094;5.北京理工大学 爆炸科学与技术国家重点实验室,北京100081)
0 引言
空间碎片以及微流星体的超高速撞击严重威胁长寿命、大尺寸航天器的安全运行。针对航天器的防护结构进行仿真或实际撞击实验,研究其撞击损伤效应,对确保采取有效的防护措施十分必要[1-4]。国内外学者开展了诸多针对空间碎片超高速碰撞过程的仿真[5-10]和实验[11-14]研究,获得不同弹丸对不同防护层撞击后的损伤效应。然而,除了损伤效应外,人们还希望获得防护结构被弹丸高速撞击发生破裂时的真实三维面形数据,以期通过三维数据直接进行任意几何尺寸在不同时间的形变及破裂程度分析。
光学高速摄影测试技术是冲击爆轰过程分析中的常用手段之一。将光学三维面形与高速摄影测试技术相结合,利用结构光三维面形测量技术[15]可实现高速碰撞穿甲过程三维面形的数字化。Takeda等[16]于1983年提出了傅里叶变换轮廓术,在傅里叶频谱滤波、时间傅里叶变换等方面有着深入的研究。傅里叶变换轮廓术(Fourier Transform Profilometry,FTP)在用于动态高速三维面形测量时,具有明显的实时性优点[17],对物体表面的几何尺寸测量精度高且只需要采集单频的条纹投影调制图像即可重建被测物体面形的三维数据,因此其三维面形数据获取速度取决于所采用的成像设备性能。苏显渝等[18]对基于单帧条纹投影的傅里叶变换方法提出了论述,但是其实现的动态三维数据易受环境光照的影响。王辰星等[19]提出了单幅条纹图像傅里叶自适应滤波窗相位提取方法,提高了傅里叶变换轮廓术的稳定性,但在光照影响下仍会出现相位展开错误。
航空飞行器机身以及坦克等装甲设备的防护设计中需要进行爆轰测试。通常使用二级轻气炮[11],利用高压气体产生高强度冲击波推动靶弹飞行并撞击标靶,以探索高速穿甲过程中装甲裂变面形三维数据的时空分布,从而为装甲的结构设计提供基本的性能参数。
本文针对高速冲击和爆轰穿甲过程靶面三维面形数据获取的需求,通过设计特定的光路和傅里叶变换轮廓术的三维测量算法,结合狭小空间的结构光系统参数标定方法,实现穿甲面形形变过程的三维数据获取。
1 基于傅里叶变换轮廓术的高速三维面形测量方法
1.1 FTP三维面形测量原理
穿甲动态过程测量的FTP结构光测量系统如图1所示。
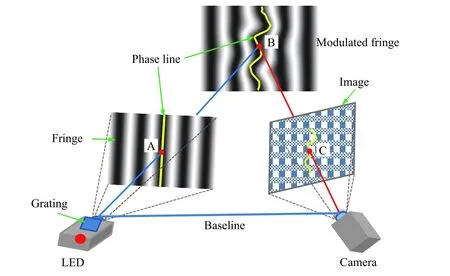
图1 傅里叶变换轮廓术测量原理Fig.1 Measurement principle of Fourier transform profilometry
通过投影系统投射固定频率的正弦或二值光栅条纹图像到被测物体上,利用高速相机拍摄被物体几何面形调制后的变形条纹图像,其成像变形条纹可表示为

式中:u、v分别为点在图像中对应行和列的像素坐标;Iʹ(u,v)为背景光强;Iʺ(u,v)为调制强度;f0为投影条纹的频率, φ(u,v)是由于物体表面高度h(u,v)引起的相位调制。为了得到相对高度和消除系统误差,系统需要h0(u,v)=0参考平面的相位分布φ0(u,v),从而获得相对相位差

为获取拍摄的调制条纹图相位差Δφ(x,y),将式(1)改写为指数形式并进行二维傅里叶变换可得:

式中,基频分量Q(u-f0,v)即是包含物体高度变化信息的频谱成分,采用适当的带通滤波窗口滤出Q或Q*信息进行逆傅里叶变换,取其虚部和实部的余切值即可得到截断相位,由空间相位展开算法[20]获得连续相位 φ(u,v),根据参考平面的相位参考值与结构光系统四平面高度映射[21]即可获得被测面形的高度h(u,v),高度计算公式为

式中:a(u,v)、b(u,v)、c(u,v)分别为结构光系统四平面标定所获得的相位零次项、一次项和二次项系数。
1.2 结构光三维测量系统标定及横坐标值计算
进行相位高度映射后所得结果的横坐标依旧是像素坐标,因此需对结构光测量系统进行摄像机和系统参数标定,从而将像素坐标转化为物理尺寸坐标。如不考虑成像镜头的畸变,空间任何一点在图像上成像的摄像机针孔模型如图2所示,图中:f为摄像机焦距;(u0,v0)为相机主点坐标。
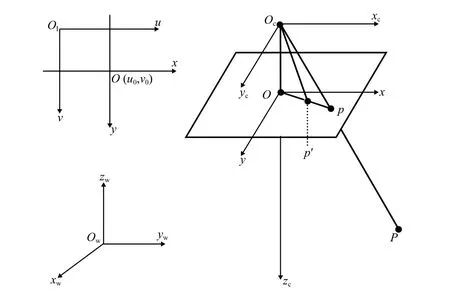
图2 摄像机成像模型Fig.2 Imaging modelof the camera
设空间点P在世界坐标系中的坐标为[X,Y,Z]T,其在图像中的投影坐标p为[u,v]T,则P点在针孔成像模型投影下的成像关系为
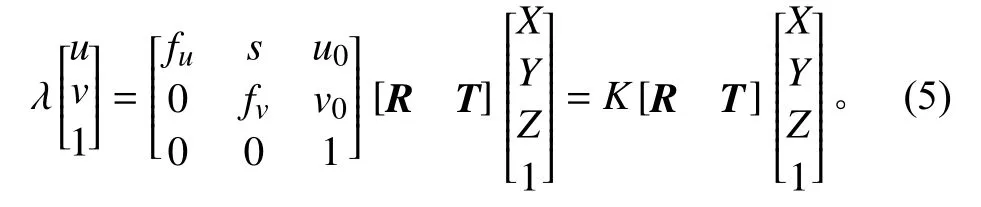
式中:λ为任意常数;R和T分别为世界坐标系到相机坐标系的旋转矩阵和平移矢量;K为摄像机内参数矩阵;fu=f/dx、fv=f/dy,分别为图像u轴和v轴方向的有效焦距。使用张正友提出的平面标定法[22]即可解算出式(5)中的内参数K以及外参数R和T。
当每个像素点的高度值h(u,v)被计算出后,即世界坐标Z(u,v)=h(u,v),结合图像坐标值[u,v]T将其代入式(5),即可反向计算出右侧的未知参数[X,Y]T,从而获得被测物体表面的点云数据[X,Y,Z]T。
2 实验与分析
实验采用北京理工大学爆炸科学与技术国家重点实验室的二级轻气炮作为弹丸加载发射装置,采用中国工程物理研究院的百万帧频光电相机作为图像获取设备,以合金材料弹丸高速撞击铝合金靶材过程所产生的动态三维面形几何形变作为待测量。算法实现的软件平台为W indows10操作系统,编程语言为MatLab,硬件为Inter CPU E5-2620(4×2.1GHz,16 GB)。
2.1 系统结构设计与标定
本次实验采用恒定条纹图像投影来满足高速纳秒级曝光照明,所设计的柯拉照明系统结构如图3所示,目的是利用误差扩散编码二值物理光栅将正弦条纹投影到被测物体表面。
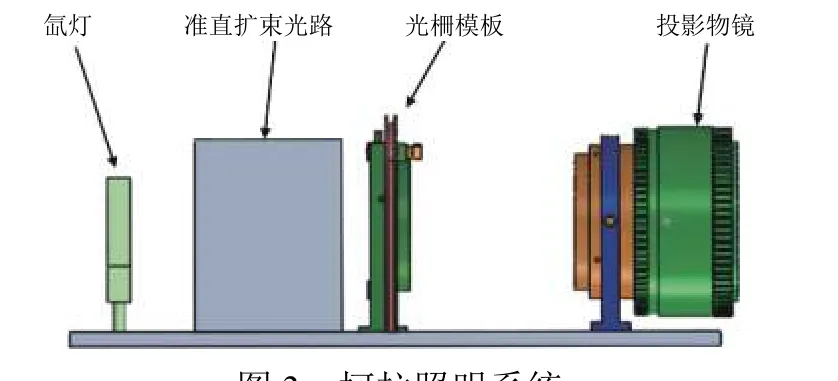
图3 柯拉照明系统Fig.3 The Kola illumination system
实验中二级轻气炮的测试试验段空间狭小,因此用光路转折的方法解决防冲击破坏和安装空间限制的问题,具体光路设计结构如图4所示。实验中通过调整光电相机和投影系统高度,尽量保持光轴处于同一水平面上并具有一定夹角来满足三角测量关系。为保证实验安全,冲击过程需在封闭靶室中进行,由反射镜将投影和拍摄光路透过靶室两侧的玻璃窗偏折进靶室,实现从靶室外对冲击过程进行拍摄测量。
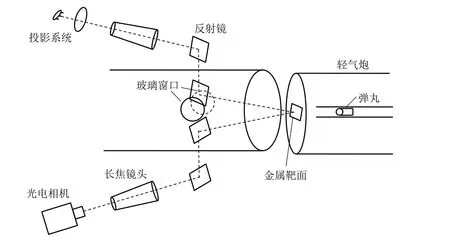
图4 二级轻气炮穿甲测量实验的FTP 三维测量结构Fig.4 FTP 3D measuring structure for armor piercing experiment w ith two-stage light gasgun
实验装置搭建完毕,首先需要进行摄像机和系统参数标定。系统标定机构如图5(a)所示,其圆点平面标定靶标(见图5(b))固定于精密位移平台上,控制位移平台按照图5(c)所示的标定过程移动靶标,在不同空间位置采集靶标图像,完成系统参数标定。标定完成后将金属靶板固定于标定空间场的中间位置作为爆轰实验测试靶。

图5 系统参数标定Fig.5 Calibration of the system
2.2 高速冲击爆轰实验
高速爆轰实验所穿甲金属靶板厚度为5mm,弹丸速度为2.976 km/s,光电相机拍照间隔为500 ns,拍摄过程共获得8张条纹图像,采用FTP方法计算所获取的高速碰撞过程金属板三维面形数据及对应条纹图像如图6所示。图中:第1和第3行的8张图像为不同时刻拍摄的变形条纹图,第2和第4行的8张图为对应时刻由条纹图重建出的三维面形数据,可以看到金属板在受到弹丸撞击后,快速隆起鼓包,变形量随时间的推延而不断变大。
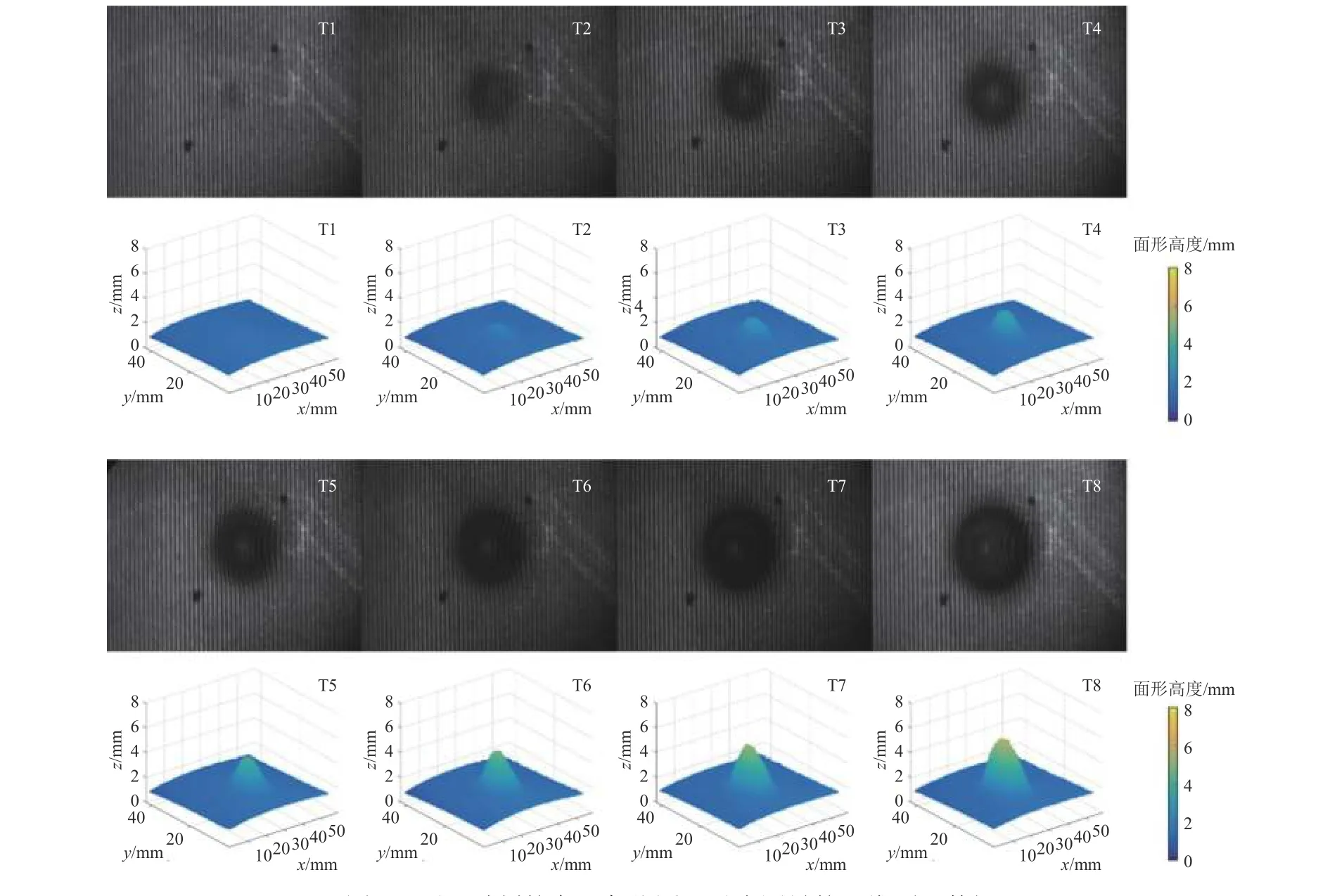
图6 不同时刻的变形条纹图及对应测量的三维面形数据Fig.6 Deformed fringe imagesand the corresponding 3Dmeasurement shape data at different times
3 结束语
本文利用二级轻气炮加载弹丸实现对穿甲靶面的高速碰撞,设计基于傅里叶变换轮廓术的结构光测量系统进行三维面形测量,由柯拉照明系统进行条纹投影,采用百万帧频高速光电相机作为视频获取设备。针对爆轰条件,采用反射镜的多重反射光路设计来获取密封靶舱中弹丸对不同防护层撞击后的条纹变形图像。对高速撞击过程穿甲靶面调制的变形条纹图像进行相位计算与分析,结合结构光系统相机标定参数,完成整个穿甲过程中不同时刻被穿甲钢板表面的三维坐标值计算。实验结果显示,所设计的方案实现了2.976 km/s高速碰撞实验中装甲面形形变过程的三维数据实时获取,能够为空间碎片高速碰撞分析和航天器防护结构性能研究提供精准的三维尺寸数据。
