水下小目标中低频声散射特性分析及试验
2020-09-07赵德鑫沈同圣李秀坤陈迎亮
赵德鑫, 沈同圣, 李秀坤, 金 鑫, 陈迎亮
水下小目标中低频声散射特性分析及试验
赵德鑫1, 沈同圣1, 李秀坤2, 金 鑫1, 陈迎亮3
(1. 国防科技创新研究院 前沿交叉技术研究中心, 北京, 100071; 2.哈尔滨工程大学 水声技术重点实验室, 黑龙江 哈尔滨, 150001; 3. 中国船舶重工集团公司 第705研究所昆明分部, 云南 昆明, 650032)
自主探测与识别水下小目标(水雷、爆炸物等)是自主水下航行器(AUV)的主要应用方式, 也是近年来水下无人系统智能化发展的一个重要方向。与传统的仅利用目标高频反向散射特性的探测方法相比, 双/多基地探测具有布阵灵活、抗干扰强、可获得的目标信息丰富等优点, 但如何利用目标中低频全方位的散射特性进行探测与识别还有待进一步研究。文中首先分析了水下目标的声散射机理, 介绍了利用AUV搭载的小孔径声呐, 采用双基地模式, 基于目标散射声场探测与识别水下小目标的方法; 然后基于COMSOL多物理场平台的有限元数值计算方法, 完成了多种频率的水下悬浮目标散射声场计算, 论述了利用中低频散射场的三维特性识别水下目标的可行性; 最后通过2种类型目标的散射声场采集水池试验, 初步论证了利用小孔径声呐采集与处理中低频水下目标散射声波是可行的。文中研究可为基于中低频声散射特性的检测和识别的进一步研究提供参考。
自主水下航行器; 中低频; 声散射; 水下小目标; 小孔径声呐
0 引言
自主水下航行器(autonomous undersea vehicle, AUV)是一种能长时间在水下自主航行的智能化装置, 它可以携带多种传感器(声、光、磁等), 执行特定的使命和任务[1-2]。近些年来, 平台、计算机、传感器、通信以及机器学习算法的高速发展大大推进了AUV技术的发展进程, 而自主探测与识别水下小目标(水雷、爆炸物等)是现阶段AUV的一种主要应用方式。
水下小目标(特别是危险目标)的探测与识别是典型的3D(dirty, dull, dangerous)任务, 比较适合AUV来承担[1]。目前, 该类任务主要采用光学成像与声学成像技术, 由于光学成像在光线不充足的水下环境中使用受限, 所以基于声学成像的侧扫声呐和合成孔径声呐便成为AUV的主要装备[3]。上述2种主动声呐系统主要利用目标的高频反向散射特性。进行目标搜索时采集的数据量较大, 属于精细度较高的作业模式[4], 而且合成孔径声呐成像时需要对AUV的导航误差进行修正[5], 所以对于处理能力有限的AUV来说, 很难对采集到的数据进行实时处理, 仍然需要人在回路进行专业的图像识别。
双/多基地声呐具备抗干扰性强、探测距离远以及获得的目标信息丰富(多方位散射信息)等诸多优点[6]。Karasalo等[7]描述了2种在双基地模式下用于计算沉底与半掩埋目标散射特性的方法, 并与正向散射试验结果(中心频率为5 kHz)进行了对比验证。Malarkodi等[8]介绍了一种水下目标散射特性提取方法, 并在40~80 kHz的频段内, 对球和圆柱等目标开展了水池试验验证。Zampolli等[9]仿真与试验分析了中低频沉底(沙质)弹性目标的反向声散射特性。这些研究都集中于中低频, 主要分析、论证某一方位(反向或正向)的目标散射特性, 没有对目标360°全方位的散射特性进行整体分析。
随着人工智能技术的迅速发展, AUV的自主和环境自适应能力不断增强, AUV的小型化和低成本也为其集群作业带来可能性[10]。为获得更加丰富的目标信息[11-12], 使AUV具备实时处理能力, 将AUV集群构建成双/多基地探测系统成为重要的研究方向之一。麻省理工学院的Schmidt教授团队开展了AUV集群协同探测、定位以及分类水下目标的研究[13], 并用大型AUV(Bluefin-21)进行了双基地水下目标散射声场采集与处理的开放水域试验, 以仿真与实测数据分析相结合的方式, 初步论证了AUV完全依靠自身智能化的行为控制, 具备实时探测与分类水下目标的可能性。Fischell描述了利用机器学习算法, 根据目标散射声场的三维特性, 实时估计水下目标方位[14]和分类2种水下目标[15]的方法, 仿真与试验证明了方法的可行性以及较好的应用前景。目前, 上述研究工作仍处于发展初期, 缺乏对水下小目标中低频三维散射特性较为系统的分析与论证。
鉴于此, 文中首先分析了水下目标的声散射机理, 然后仿真研究了各种频率(中低频范围)下水下小目标的三维散射特性, 最后开展了目标散射声场采集与处理的水池试验。仿真结果论证了利用中低频目标散射声场的三维特性分类识别水下目标的可行性, 水池试验的结果表明利用小孔径声呐采集与处理中低频水下目标散射声波是可行的。
1 双基地水下目标散射特性分析
1.1 双基地探测
双/多基地声呐系统是一种新体制声呐综合探测系统, 其收发设备(声源与接收设备)分置, 同时具有主动声呐和被动声呐的工作特点[16]。在双基地条件下, 声源与接收设备是远距离分开的(见图1), 声源向水中发射声脉冲, 接收设备可接收目标的散射回波。由于散射回波来自360°全方位目标散射空间, 所以可利用各个方向目标反射的能量探测目标。
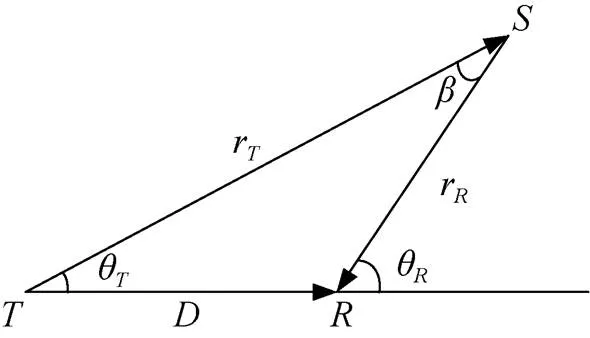
图1 双基地声呐系统目标探测示意图
图1中:为声源;为接收设备;为水下目标;为分置角;θ为发射波束指向角;θ为接收波束指向角;r为声源到目标的距离;r为目标到接收设备的距离;为基线长度。目标的散射回波通常与混响(体积混响+界面混响)和声源直达波混叠在一起。
1.2 目标散射机理分析


图2 球的平面波散射示意图

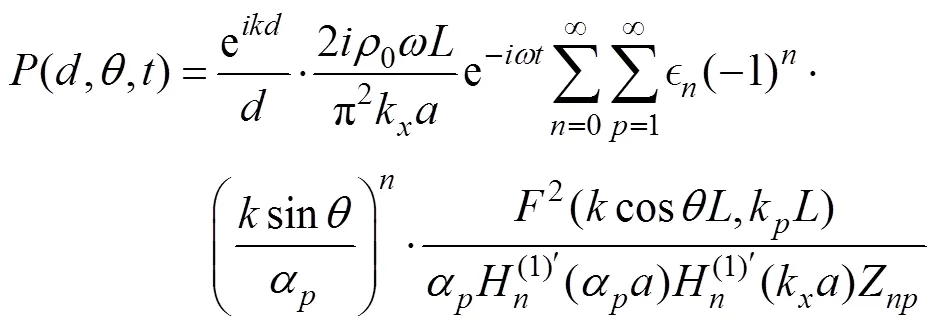
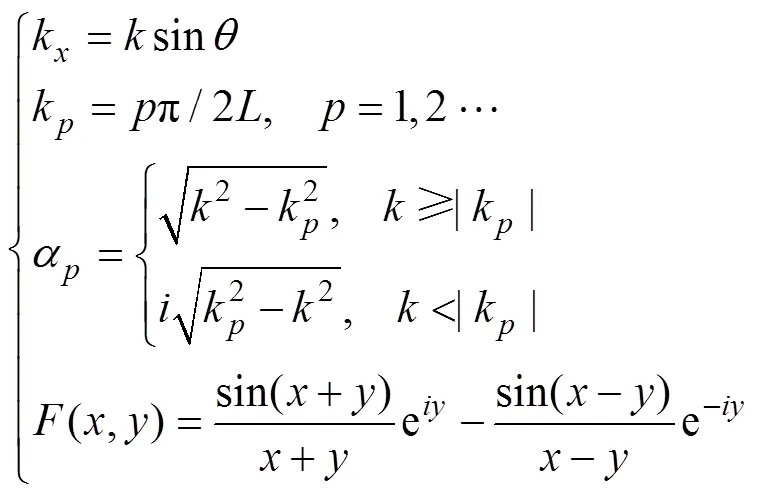
对于有限长的圆柱壳体, 其散射声场在数学上不存在严格理论解, 研究者得到了一些近似解法, 例如基于弹性理论和Kirchhoff积分的方法, 以及有限元方法等[16]。
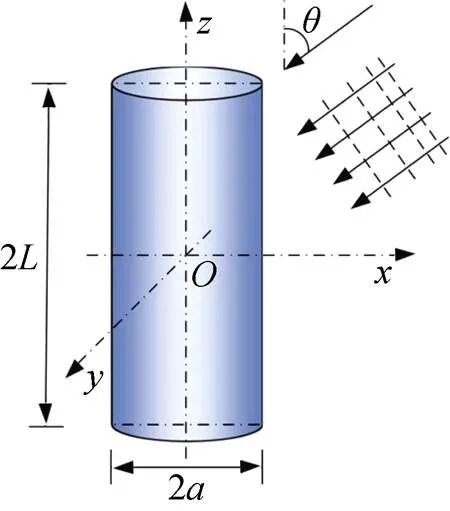
图3 有限长圆柱声散射示意图
表征物理属性的参数定义为

对于结构复杂的水下目标, 需依赖各种仿真工具(如COMSOL), 通过数值计算的办法对目标全方位的声散射特性进行分析。
1.3 基于目标散射场的目标分类识别方法
当声源照射水下目标时, 目标会重新辐射出声波, 这种再辐射的声场由多种时间延迟的反射声波相干构成, 而且这种相干模式在给定的频带内是稳定的[9]。AUV装载小孔径接收阵, 可从不同角度、距离和深度, 围绕目标采集散射声波, 利用目标散射声波形成的干涉声场的三维特性, 实现目标的探测、定位与分类, 如图4所示。
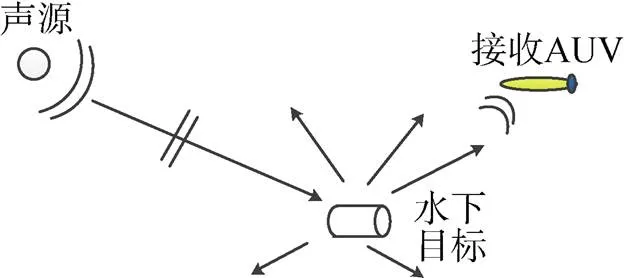
图4 基于目标散射场的AUV探测示意图
目标探测与识别的流程:
1) AUV进入由声源照亮的指定搜索区域, 开始检测;
2) 如果检测到疑似目标, 便用自身装备的声呐系统对准目标;
3) AUV在疑似目标周围不断采集散射声场, 逐渐构建出目标散射场的三维信息;
4) AUV将实时构建的目标三维散射场信息与自身预制的散射场模型相对比, 逐渐分类识别出水下目标。
2 仿真分析
在水声应用中, 通常用中低频声呐(对于水下米级目标, 频率小于100 kHz)穿透水下目标外壳, 以获得目标的内部结构和材质等信息(类似于医学超声和无损检测), 并利用这些信息进行最佳的目标探测与识别[17], 其常用的频段为0.1~ 10 kHz。鉴于此, 文中在10 kHz频率附近, 用COMSOL软件对空心钢球壳(密度为7 800 kg/m3, 纵波波速为5940 m/s, 横波波速为3 100 m/s)和实心铝棒(密度为2700 kg/m3, 纵波波速为6300 m/s, 横波波速为3080 m/s)进行声散射特性分析。在COMSOL仿真中, 添加了压力声学频域模块和固体力学模块, 弹性体通过固体力学来描述, 流固耦合(边界条件)无需再设置。另外, 将模型的最外环设置为完美匹配层, 使用软件自带的可对入射声波不造成反射并随距离增大而消散掉的功能模拟水下自由场。
2.1 空心钢球壳散射场分析
仿真分析了直径0.5 m, 壳厚4.7 mm的不锈钢球在5、7、10、15 kHz上的散射声场三维空间特性。目标布放如图5所示, 声波沿轴方向入射, 目标中心处于坐标原点。

图5 钢球三维空间布放示意图
图6(a)为5 kHz声波入射时的散射声场分布情况。对于5 kHz平面波, 波长为0.3 m, 而目标直径为0.5 m, 此种情况下的目标尺寸相对于声波波长可比拟, 散射声场处于衍射和散射的不能明显区分的状态。从图6(a)中可以看出, 低频状态下的目标散射声场分布较均匀, 指向性不明显。
图6(b)为7 kHz声波入射时的散射声场分布情况。相对于图6(a)的结果, 由于频率的增加, 7 kHz声场的空间分布开始出现一定的指向性, 但并不特别明显, 此时的声波波长仍然没有大于目标尺寸, 目标散射声场仍然较复杂。
图6(c)为10 kHz声波入射时的散射声场空间分布情况。由于频率的增加, 声波波长减小, 因此目标散射声场空间分布指向性开始明显, 目标强度集中于一定的角度范围内, 对于双基地探测情况, 目标散射强度主要集中于前向散射声场处。并且这种指向性随着频率的增加越来越明显(见图6(d))。

图6 钢球散射场三维空间分布
AUV可在目标散射声场的特定接收面内, 围绕目标旋转, 接收目标散射信号。将图6中的三维散射空间声场进行特定平面截取, 即可观察AUV接收声场的空间分布情况。接收平面如图7所示, 声波从轴正方向入射到目标表面, 截取红圈所在的远场平面, AUV接收到的声场如图8所示。
在频率较低的情况下, 目标散射声场空间指向性不明显, 此时AUV接收到的声场能量随空间分布较均匀(见图8(a)和8(b))。在频率较高的情况下, 目标散射声场分布指向性较强, 此时AUV接收的声场能量主要集中于前向散射方向, 其他方向都相对较弱(见图8(c)和8(d))。另外, 从图8中可以看出, 虽然频率从低到高, 但散射声场的最大强度并没有特别大的变化; 相反, 在低频情况下, 散射声场空间分布较均匀, 可以避免高频情况前向散射过强, 而抑制其他方向散射声场强度的情况。

图7 钢球三维布放及接收面示意图
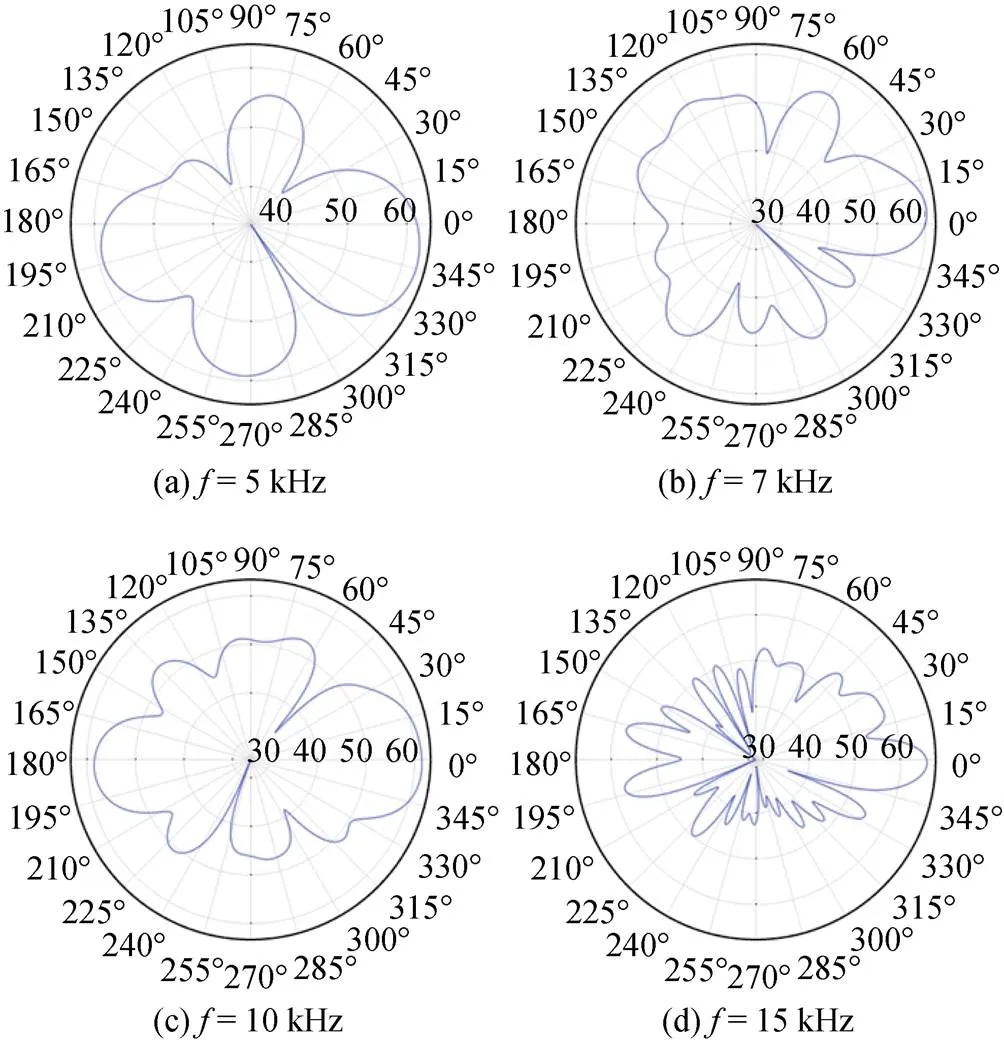
图8 特定接收面钢球散射声场三维空间分布
2.2 实心铝棒散射场分析
仿真分析了长0.9 m、直径0.3 m的实心铝棒在5、7、10 kHz上的散射声场三维空间分布特性, 目标布放如图9所示, 声波沿轴方向入射, 目标中心处于坐标原点。
与钢球的分析结果类似, 在频率较低的情况下, 铝棒的散射声场分布仍较均匀, 指向性不明显(见图10(a))。而随着频率的增加, 散射声场指向性增强, 声场能量主要集中于前向散射方向(见图10(b)和10(c))。

图9 铝棒三维空间布放示意图
在特定的接收面内, 声波沿轴正向入射(铝棒的正横方向), 接收为远场平面(如图11所示)。铝棒的散射声场分布随频率变化的规律与钢球情况相似(如图12所示)。
针对基于目标三维散射声场空间分布的分类方法, 目标的散射声场空间分布差异越大, 越有利于提升分类效果。从上述分析可以看出, 当声源的频率较低 (如5 kHz) 时, 钢球和铝棒的散射声场均处于分布较均匀的状态, 此时两者的可区分度不高, 不利于分类; 而在频率较高的情况下, 两者的散射声场空间分布指向性均开始变得尖锐, 能量朝前向散射方向增强, 其余方向的散射能量减弱。在双基地模式的AUV探测中, 由于直达波与目标的前向散射波到达AUV的时间较接近, 因此为克服直达波干扰, 通常会将前向散射方向的接收波去掉, 而观察其余方向散射声场的空间分布情况。所以, 声源频率过高或过低对目标的分类识别均有不利影响。

图10 铝棒散射声场三维空间分布
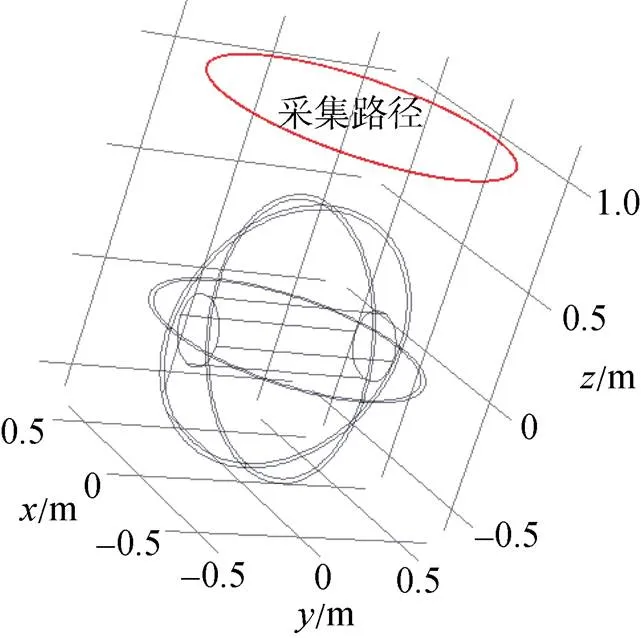
图11 铝棒三维布放及接收面示意图
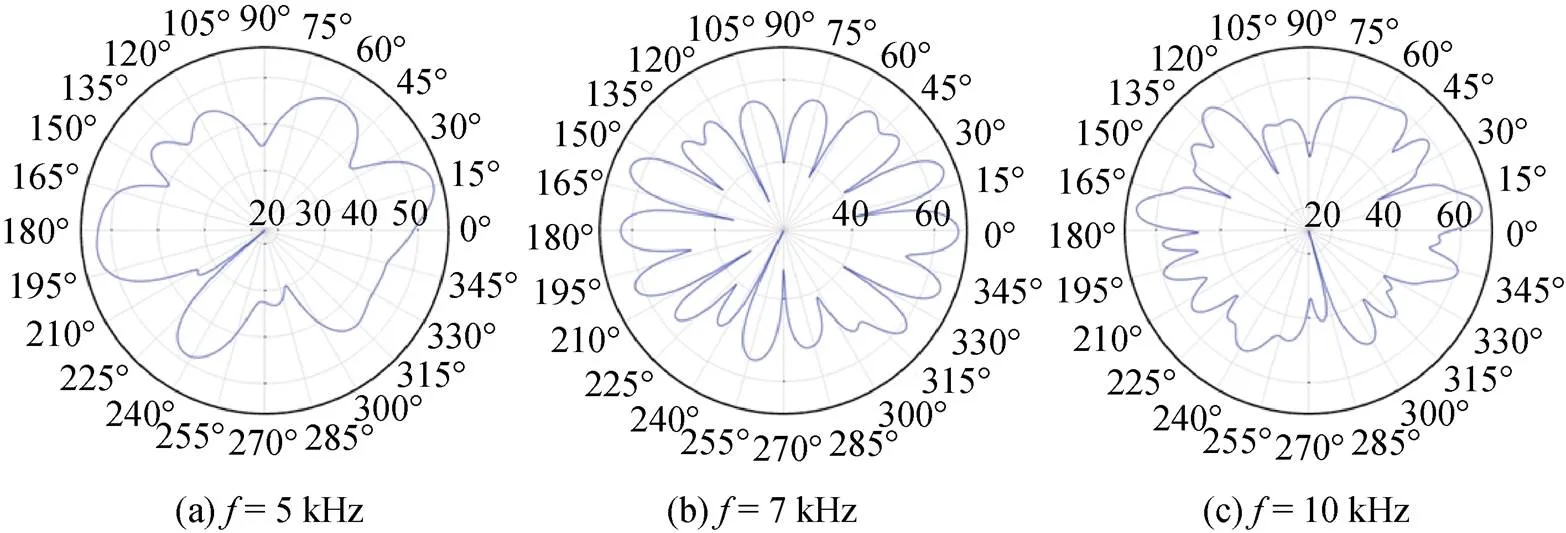
图12 特定接收面铝棒散射声场三维空间分布
另外, 如果考虑沉底和掩埋目标, 结合混响的频率特性, 对于比较平滑的海底, 在较宽的频率范围内, 混响的强度大约以3 dB/倍频程的规律随频率的增加而增大, 即频率越大、混响越强、越不利于目标的探测。而低频声波的波长较长, 受海底小尺度界面形貌、衰减和不均匀性的影响较小。因此, 针对选取的钢球和铝棒这2个目标, 可以考虑将频段设置在7~9 kHz的范围内。
3 试验研究
在利用AUV采集水下声场数据对目标进行实时分类的问题中, 找到对AUV、声源以及目标的位置误差具有较好鲁棒性的特征至关重要。AUV自身导航系统的不确定性, 加上AUV计算处理能力的限制, 使得使用敏感时间和相位信息进行实时目标分类还较为困难。所以, 文中对目标散射声场特性的分析只选择声压值。
试验地点为西北工业大学的6面消声水池。试验目的是为了检验在双基地模式下, 用小孔径声呐是否可以检测到目标的散射声波。基于上述仿真分析的结果, 文中在频率为8 kHz时对空心铝球壳和实心铝棒进行声散射声波采集与处理试验, 试验设备详细参数见表1。虽然接收设备含有10个水听器, 但试验并不做成阵处理。

表1 试验设备参数列表
3.1 试验布局与数据采集
试验布局及部分设备分别如图13和图14所示。其中, L1为目标到接收阵的距离(平行于水池壁)、L2为目标到声源的距离(平行于水池壁)、D1为目标的深度、D2为接收阵的深度、D3为声源的深度、D4为接收阵到声源的距离(垂直于水池壁)。

图13 试验布局示意图

图14 部分试验设备图
通常, 近场区声场沿轴向干涉起伏变化明显, 而远场区声场沿距离方向不再出现相干起伏而按球面波扩展规律单调衰减[18]。所以, 需选择符合远场条件的目标散射声场进行分析, 远场条件为

式中:为声波的波长;为辐射的最大线度尺寸;是无量纲的参数, 其值在1≤≤3范围内选定。
声源的频率为8 kHz, 在声速为1 500 m/s的情况下, 声波的波长为0.187 5 m; 铝球壳的外径为0.5 m, 目标散射声场的远场条件为1.3~4 m; 铝棒的尺度为0.9 m×0.3 m, 目标散射声场的远场条件为4.32~12.96 m。另外, 对于2 ms时长的声脉冲, 在声速为1 500 m/s的情况下, 为在时间维度区分直达波与目标散射声波, 需满足条件(见图1)
根据上述条件, 综合考虑目标、声源和接收阵的布局。选取4组试验布局如下。
第1组: 频率为8 kHz、脉宽为2 ms、L1为9.5 m、L2为6 m、D4为2.5 m、D1为4 m、D2为2 m、D3为3 m、水池中无球。
第2组: 频率为8 kHz、脉宽为2 ms、L1为9.5 m、L2为6 m、D4为2.5 m、D1为4 m、D2为2 m、D3为3 m、水池中有球。
第3组: 频率为8 kHz、脉宽为2 ms、L1为10 m、L2为9.5 m、D4为1.5 m、D1为2 m、D2为2 m、D3为3 m、水池中无圆柱。
第4组: 频率为8 kHz、脉宽为2 ms、L1为10 m、L2为9.5 m、D4为1.5 m、D1为2 m、D2为2 m、D3为3 m、水池中有圆柱。
3.2 试验数据分析
采集并存储1 s、共11组(10个水听器和1个标听)的数据, 标听布放在声源附近。11组数据为同步采样所得。由于采样频率为100 kHz, 所以每一组数据的采样点数为100000个, 数据处理流程如下:
1) 根据目标、接收阵以及声源的相互位置关系, 计算声波从声源到目标、目标到接收阵、声源到接收阵的传播时间;
2) 选取1个水听器阵的接收数据;
3) 计算声源发射声波的时刻, 即标听接收到声波的时刻;
4) 估计目标散射波到达接收阵的时刻, 加窗截取待处理的数据;
5) 水听器与采集卡之间的电缆较长且无屏蔽, 存在低频串扰, 所以采用7~9 kHz的有限冲击响应(finite impulse response, FIR)带通滤波器对加窗的数据进行滤波处理;
6) 对滤波后的数据进行快速傅里叶变换 (fast Fourier transform, FFT)频域分析。
上述每幅处理结果图中都包含4幅小图(如图15~18所示), 图(a)表示采集到的100 000点原始数据、图(b)表示截选的目标散射数据、图(c)表示滤波后的数据、图(d)为用FFT处理后的频域分析结果, 对试验结果分析如下。


图15 无球情况下数据处理结果
图16 有球情况下数据处理结果

图17 无圆柱情况下数据处理结果
2) 图17、图18为一组。声波的持续时间为2 ms, 共16个周期, 从图中同样可以看出, 有目标情况下的声场能量大于无目标情况下的声场能量, 而且差异更为明显, 这是由于圆柱尺度比球壳大的缘故; 另外, 从图(c)中也可以看出, 无目标情况下, 声场有明显的干涉效应。
4 结束语
文中首先理论分析了水下2种简单目标(球和有限长圆柱)的声散射机理, 并介绍了利用AUV, 采用双基地模式, 基于目标散射声场探测与识别水下小目标的方法; 然后使用COMSOL仿真软件完成了多种频率(7~15 kHz)水下悬浮目标的散射声场计算, 论述了利用AUV自主航行, 围绕目标进行散射场全方位的采集, 以2种目标三维散射特性的差异识别水下目标的可行性; 最后通过水池试验初步论证了利用小孔径声呐(通常由小型AUV搭载)采集与处理中低频水下目标散射声波是可行的。
文中的水下小目标中低频声散射特性分析, 目前只考虑了球和圆柱2种简单目标, 而且只分析了水下悬浮情况, 实际中较为常见的复杂目标(如两端为圆头的圆柱)以及沉底和掩埋情况仍有待分析; 而且由于试验水池及部分机械设备的限制, 导致可用的试验区域较小, 采集的点位不丰富, 设置的双基地角也较小(9°~26°), 未来的开放水域试验应做360°的数据采集。下一步的研究工作将围绕以上内容展开。
[1] Seto M L. Marine Robot Autonomy[M]. New York: Springer, 2013: 1-40.
[2] 梁国龙, 张新宇, 孙思博, 等. 单信标导航精度分析与航路规划[J]. 水下无人系统学报, 2019, 27(2): 181-188.Liang Guo-long, Zhang Xin-yu, Sun Si-bo, et al. Analysis of Single Beacon Navigation Accuracy and Path Planning [J]. Journal of Unmanned Undersea Systems, 2019, 27(2): 181-188.
[3] Miguel C. Investigation of Requirements and Capabilities of Next-Generation Mine Warfare Unmanned Underwater Vehicles[D]. Monterey, California: Naval Postgraduate School, 2017: 1-16.
[4] Fischell E M, Schmidt H. AUV Behaviors for Collection of Bistatic and Multistatic Acoustic Scattering Data from Seabed Targets[C]//IEEE International Conference on Robotics and Automation. Stockholm, Sweden: IEEE, 2016: 2645-2650.
[5] Hansen R E, Callow H J, Saeboe T O, et al. Challenges in Seafloor Imaging and Mapping with Synthetic Aperture Sonar[C]//8th European Conference on Synthetic Aperture Radar. Aachen, Germany: IEEE, 2010: 3677-3687.
[6] 张小凤, 张光斌. 双/多基地声呐系统[M]. 北京: 科学出版社, 2014.
[7] Karasalo L, Skogqvist P. Acoustic Scattering from Submerged and Buried Objects[C]//Acoustic Sensing Techniques for the Shallow Water Environment. Dordrecht, Netherlands: Springer, 2006: 137-153.
[8] Malarkodi A, Manamalli D, Kavitha G, et al. Acoustic Scattering of Underwater Targets[C]//Ocean Electronics (SYMPOL). Kochi, India: IEEE, 2013: 127-132.
[9] Zampolli M, Espana A L, Williams K L, et al. Low-to Mid-Frequency Scattering from Elastic Objects on a Sand Sea Floor: Simulation of Frequency and Aspect Dependent Structural Echoes[J]. Journal of Computational Acous- tics, 2012, 20(2): 1-14.
[10] Viquez O A, Fischell E M, Rypkema N R, et al. Design of a General Autonomy Payload for Low-Cost AUV R&D[C] //IEEE/OES Autonomous Underwater Vehicles(AUV). Tokyo, Japan: IEEE, 2016: 151-155.
[11] 杨益新, 韩一娜, 赵瑞琴, 等. 海洋声学目标探测技术研究现状和发展趋势[J]. 水下无人系统学报, 2018, 26 (5): 369-386.Yang Yi-xin, Han Yi-na, Zhao Rui-qin, et al. Ocean Acoustic Target Detection Technologies: a Review[J]. Journal of Unmanned Undersea Systems, 2018, 26(5): 369-386.
[12] 雷波, 杨益新, 何传林, 等. 等声速环境中目标前向声散射简正波耦合的垂直阵空域响应特征[J]. 声学学报, 2018, 43(4): 471-480.Lei Bo, Yang Yi-xin, He Chuan-lin, et al. Modal Coupling Response on Vertical Hydrophone Array Caused by forward Scattering from Intruder in the Isovelocity Underwater Environment[J]. Acta Acustica, 2018, 43(4): 471-480.
[13] Schmidt H, Balasuriya A. Multistatic, Concurrent Detection, Classification and Localization Concepts for Autonomous, Shallow Water Mine Counter Measures[R]. Cambridge: Massachusetts Institute of Technology, 2012: 1-8.
[14] Fischell E M, Schmidt H. Supervised Machine Learning for Estimation of Target Aspect Angle from Bistatic Acoustic Scattering[J]. IEEE Journal of Oceanic Engineering, 2017, 42(4): 759-769.
[15] Fischell E M, Schmidt H. Multistatic Acoustic Characterization of Seabed Targets[J]. The Journal of the Acoustical Society of America, 2017, 142(3): 1587-1596.
[16] 王英民, 刘若晨, 王成. 多基地声呐原理与应用[M]. 北京: 电子工业出版社, 2015.
[17] Zampolli M, Jensen F B, Tesei A. Benchmark Problems for Acoustic Scattering from Elastic Objects in the Free Field and Near the Seafloor[J]. The Journal of the Acoustical Society of America, 2009, 125(1): 89-98.
[18] 张明敏, 卢建斌, 席泽敏. 波动声场中的远场条件[J]. 声学技术, 2011, 30(4): 1-4.Zhang Ming-min, Lu Jian-bin, Xi Ze-min. Far Field Condition of Fluctuant Acoustic Field[J]. Technical Acoustics, 2011, 30(4): 1-4.
Analysis and Test of Low-/Mid-Frequency Acoustic Scattering Characteristics of Small Underwater Target
ZHAO De-xin1, SHEN Tong-sheng1, LI Xiu-kun2, JIN Xin1, CHEN Ying-liang3
(1. Advanced Interdisciplinary Technology Research Center, National Innovation Institute of Defense Technology, Beijing 100071, China; 2. Acoustic Science and Technology Laboratory, Harbin Engineering University, Harbin 150001, China; 3. The 705 Research Institute Kunming Branch, China Shipbuilding Industry Corporation, Kunming 650032, China)
Autonomous detection and identification of small underwater targets(such as mine and explosives) is one of the main applications of autonomous undersea vehicle(AUV), and is also an important development direction of intelligentization of unmanned undersea systems in recent years. Compared with the traditional detection method that only uses the high frequency backscattering characteristics of the target, bistatic/multistatic detection has the advantages of flexible array arrangement, strong anti-interference performance and abundant available target information, etc. To make use of the omnidirectional low-/mid-frequency scattering characteristics of targets for detection and identification, the acoustic scattering mechanism of underwater target is analyzed theoretically, and the method of using the AUV-borne small aperture sonar with bistatic mode to detect and identify small underwater target based on the scattered acoustic field is introduced. Then, based on the finite element numerical calculation method of the COMSOL multi-physical field platform, the scattered acoustic field calculation of underwater suspended target with various frequencies is completed, and the feasibility of using the three-dimensional characteristic of low-/mid-frequency scattered field to identify underwater target is discussed. Finally, the feasibility of using small aperture sonar to collect and process the low-/mid-frequency scattered acoustic waves of underwater targets is demonstrated through water-tank experiment of scattered acoustic field collection of two kinds of targets. This study may provide a reference for further research on detection and identification based on the characteristics of low-/mid-frequency acoustic scattering.
autonomous undersea vehicle(AUV); low-/mid-frequency; acoustic scattering; small underwater target; small aperture sonar
TP242.6; TB566
A
2096-3920(2020)04-0359-11
10.11993/j.issn.2096-3920.2020.04.002
2019-09-01;
2019-12-05.
国家自然科学基金项目资助(51809274).
赵德鑫(1984-), 男, 博士, 助理研究员, 主要研究方向为AUV水下探测技术.
赵德鑫, 沈同圣, 李秀坤, 等. 水下小目标中低频声散射特性分析及试验[J]. 水下无人系统学报, 2020, 28(4): 359-369.
(责任编辑: 许 妍)
