基于逆向解算的领航AUV导航数据后处理方法
2020-09-07董权威岳才谦王奥博王亭亭
董权威, 岳才谦, 王奥博, 王亭亭
基于逆向解算的领航AUV导航数据后处理方法
董权威, 岳才谦, 王奥博, 王亭亭
(中国航天空气动力技术研究院, 北京, 100074)
由于多自主水下航行器(AUV)协同导航系统在水下长时间工作时, 领航AUV无法接收外界信息, 其定位误差会逐渐发散进而影响整个系统的定位性能。针对该问题, 文中提出一种基于捷联惯导系统/多普勒计程仪(SINS/DVL)和SINS/DVL/全球定位系统(GPS)组合导航相结合的领航AUV导航数据后处理方法。领航AUV在水下采用SINS/DVL组合导航方式对导航数据进行正向解算, 并保存其在水下航行过程中产生的导航信息。领航AUV出水后接收GPS信号, 同时采用SINS/DVL与SINS/DVL/GPS 2种导航方式进行独立滤波, 滤波结束后逆向解算出领航AUV在水下累计的定位误差, 通过结合正向和逆向解算出的结果, 使领航AUV在水下累计的定位误差得到有效修正, 进而提高多AUV系统的整体定位性能。最后通过仿真对该方法的可行性与有效性进行了验证。该方法可用于海底地形扫描、海图绘制与水下探测等领域, 可进一步提升多AUV系统采集的水下任务数据的位置精度, 提高数据的准确性与实用性。
自主水下航行器; 组合导航; 逆向解算; 后处理
0 引言
近年来, 在自主水下航行器(autonomous undersea vehicle, AUV)应用领域中, 多AUV协同导航系统已成为重点研究方向之一。多AUV协同作业能够承担单体AUV难以完成的复杂任务, 同时具有效率高、可靠性好的特点, 具有广阔的应用前景。在多AUV协同系统中, 各AUV通过装配水声设备组成通信网络, 使AUV间能够进行数据信息交互, 从而实现AUV间导航数据的共享[1-2]。多AUV系统一般采用领航跟随式协同导航方式, 且领航AUV中装配有高精度导航设备与水声通信设备, 跟随AUV仅配有低精度的导航设备和水声通信设备, 由于领航AUV配有高精度导航设备, 因此将其作为协同导航系统定位的基准, 即只需少量配有高精度导航设备的领航AUV帮助其他配有低精度导航设备的跟随AUV完成高精度定位, 且跟随AUV的数量理论上不受限制, 具有高精度、低成本的特点, 因此一直是协同导航研究的重点[3-5]。
主从式多AUV协同导航系统以领航AUV的定位信息为基准, 可在航行过程中时刻修正跟随AUV累计的定位误差[6-7]。但由于领航AUV在水下航行时不能接收外界信息, 经过长时间航行, 其定位精度势必会发散, 增大导航数据的解算误差, 从而会影响整个航行编队的定位性能。文献[3]针对单领航协同导航系统可观测性弱的问题, 提出了一种基于双领航AUV交替领航的多AUV协同导航方法, 通过在相邻时刻, 跟随AUV利用不同领航AUV的距离量测信息进行误差的协同校正, 提高协同导航系统的可观测性[8-9]。文献[6]针对领航AUV无法借助外部有源信息修正自身定位误差的问题, 提出一种基于距离量测的双领航AUV间协同导航算法, 通过2个AUV进行相对机动, 以保证系统可观测, 最终实现2个领航AUV定位误差趋同。文献[9]提出了一种基于导航数据反演的捷联惯导系统(strap-down inertial navigation system, SINS)对准方法, 通过对导航数据执行逆向-正向解算, 降低了系统的对准时间。针对以上研究, 并参考文献[10]和文献[11]所采用的导航信息反演思想, 文中提出一种基于SINS/多普勒测速仪(Doppler velocity log, DVL)与SINS/DVL/全球定位系统(global positioning system, GPS)相结合的导航数据后处理方法, 该方法在水下采用SINS/DVL组合导航方式对导航数据进行正向滤波; 出水后, 领航AUV接收GPS定位信息, 采用SINS/DVL与SINS/DVL/GPS 2种组合导航方式并进行独立滤波, 滤波结束后, 逆向解算得出系统的定位误差, 通过结合正向和逆向解算的结果, 对领航AUV在水下累计的定位误差进行修正。该方法应用于海图绘制、海底勘探等领域, 可以有效修正领航AUV在水下累计的定位误差, 提高其定位精度, 进而提升整个系统的定位性能。
1 基于SINS/DVL/GPS组合的领航AUV协同导航系统
1.1 协同导航系统滤波方法
一般情况下, SINS/DVL组合系统所采用的是间接滤波方式, 获得SINS误差状态最优估计后, 通过反馈校正, 将速度误差、位置误差、失准角误差与陀螺漂移反馈给系统, 利用惯导解算对反馈的信息进行误差补偿, 得到更加准确的导航信息。
通过结合SINS/DVL与SINS/DVL/GPS 2种组合方式, 可为领航AUV提供更高精度的导航信息。领航AUV在水下航行时, 采用SINS/DVL方式进行导航, 当其完成水下任务出水后接收GPS信息, 并采用SINS/DVL/GPS方式进行导航, 对自身的定位信息进行修正, 同时继续采用SINS/DVL进行水面导航, 对速度信息进行更新与修正。通过接收的GPS信息, 对领航AUV出水时刻的定位误差进行修正, 并进行逆向推导, 反演出领航AUV在水下累计的定位误差, 进而对其在水下航行过程累计的误差进行修正。该组合导航系统滤波原理框图如图1所示。
1.2 DVL误差模型
DVL所采用的原理是多普勒效应, 多普勒效应是指沿发射源的发射点与接收源的接收点间的直线方向产生相对速度时, 发射与接收频率不相同, 产生的频率差为多普勒频移。产生的相对速度与多普勒频移成正比, 根据发射频率和多普勒频移就可求出这一相对速度[6-7], DVL的工作原理图如图2所示。

图1 SINS/DVL/GPS组合导航系统滤波原理框图
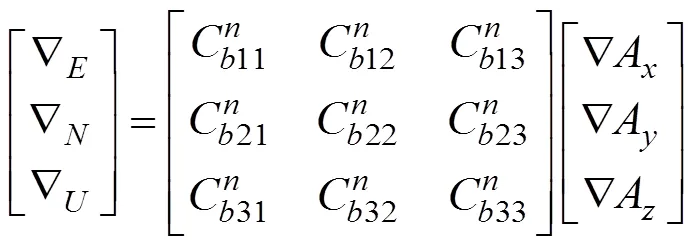
首先, 在不考虑DVL与INS安装偏差的条件下, 在载体系上DVL测速误差方程的矢量方程形式可以表示为

式中: 为载体系下DVL的测速误差; 为DVL的速度; 为量测噪声; 为刻度系数误差, 一般情况下可以看作常值。
若采用SINS/DVL组合导航方式, 由于DVL的实际坐标系与载体系不完全重合, 所以需要对转换矩阵进行估计, DVL下的坐标系与AUV下的坐标系间的速度关系可表示为
其中

2 领航AUV导航数据后处理算法
2.1 导航数据后处理算法设计思路
领航AUV导航数据的后处理采用逆向解算的方式进行处理, 通过对正向解算后的结果反向递推, 得到逆向推导后的误差, 最后结合正向与逆向解算后的结果, 消除正向解算过程发散的定位误差, 使之趋于收敛。

多AUV协同导航系统在水下航行过程中, 采用SINS/DVL组合导航方式进行定位, 将导航设备与传感器采集的信息进行保存, 并用于事后的分析和处理。通常情况下, 对于导航系统的状态参数采用卡尔曼滤波进行估计。但是, 由于水下GPS信号缺失, 采样的导航数据不包含GPS信息, 当AUV在水下长期运行后, 必然会引起导航系统定位误差的发散, 此时如果将其用于逆向解算, 会导致整个多AUV系统的定位性能受到影响[8]。

图3 领航AUV正向-逆向解算过程原理图
水下航行时, 系统采用SINS/DVL组合方式导航; 出水后系统接收GPS信息, 由于此时的GPS信息含有噪声干扰, 若用其对系统进行位置修正会带来误差。通过设计SINS/DVL与SINS/ DVL/GPS 2种滤波方式对导航数据信息进行后处理, 可使系统的定位精度得到进一步提高。对导航数据进行处理时, 2种滤波器独立运行, 滤波结束后, 利用滤波结果对系统的位置进行修正。领航AUV的导航数据后处理算法如图4所示。
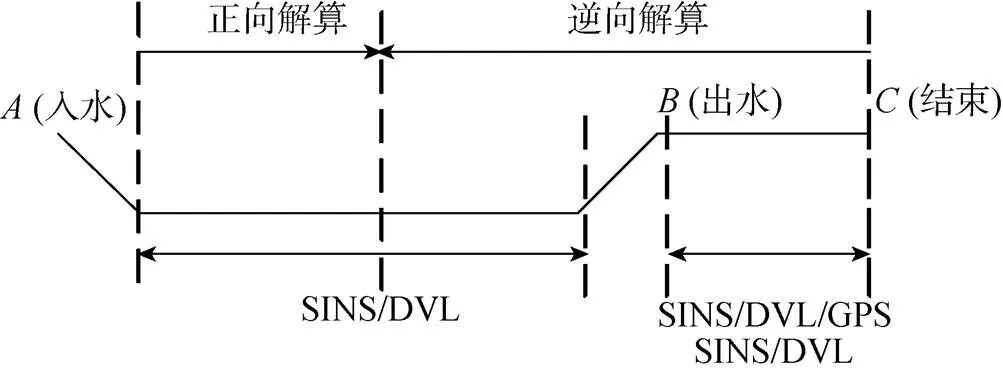
图4 导航数据后处理示意图
将SINS与DVL的速度差和SINS与GPS的位置差作为量测输入, 利用卡尔曼滤波器对导航参数进行估计, 并对估计出的导航参数进行校正后反馈给SINS, 最后利用逆向解算算法对系统在航行过程中保存的数据进行逆向解算, 得到逆向解算后的定位误差。结合系统出水前后正向和逆向解算的定位误差, 对系统出水前的位置误差进行校正。利用这种后处理算法可以有效对系统在水下航行过程中产生的定位误差进行修正, 从而提高系统整体的定位性能。
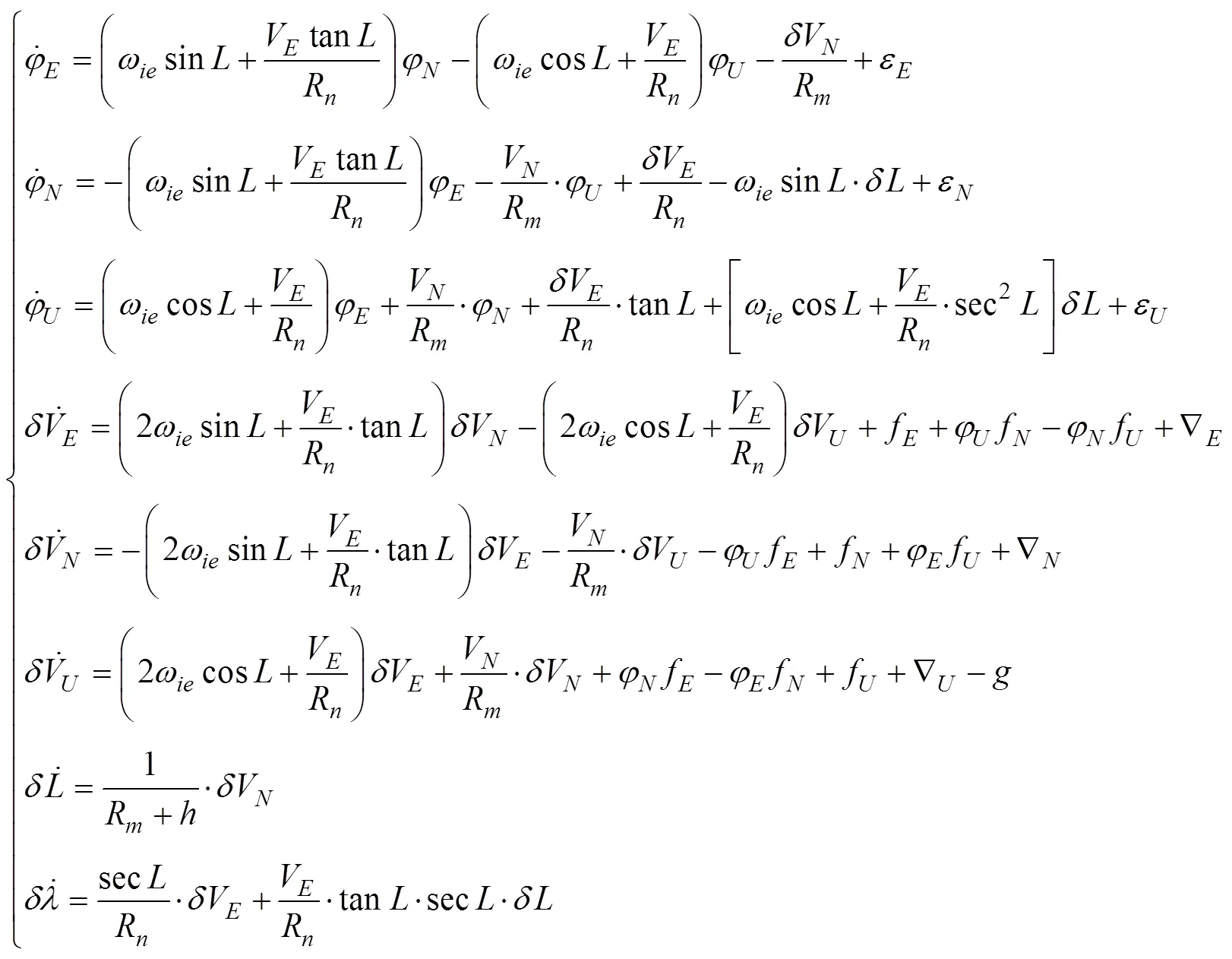
2.2 逆向导航算法

1) 姿态更新微分方程

式中





2) 速度更新微分方程



3) 位置更新微分方程




其中







通过上式的推导, 对获取的数据进行记录和逆向处理, 实现了从点到点的逆向解算。在正逆向解算过程中, 航行器的位置坐标、姿态矩阵和速度大小在同一时刻相同, 而速度方向相反。
2.3 卡尔曼滤波器设计
根据图3所示, 领航AUV从点航行至点时, SINS/DVL组合滤波方式一直存在; 而在时刻系统出水后引入GPS信息, 系统增加了SINS/DVL/GPS组合导航方式, 2种滤波方式同时存在且独立运行, 结合领航AUV的正向和逆向解算的数据信息, 对其在水下航行过程中的定位误差进行修正。
2.3.1 SINS/DVL组合导航系统的滤波模型
其中



取系统状态向量为

系统的状态方程


已知捷联惯导测得的速度为

将SINS测得的速度与DVL速度仪测得的速度在地理坐标系下的投影作差可得





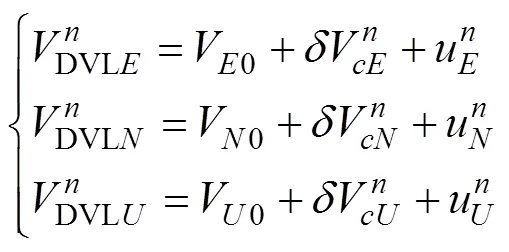
2.3.2 SINS/DVL/GPS组合导航系统滤波模型
采用SINS/DVL/GPS组合导航方式, 系统的状态方程与SINS/DVL组合导航状态方程相同, 因此只研究系统的观测方程。
系统的观测方程为

根据离散系统的卡尔曼滤波方程


3 仿真验证与分析
为验证SINS/DVL/GPS组合导航对协同导航系统定位误差精度的影响, 并验证该方法的可行性及有效性, 文中通过对领航AUV的导航数据进行后处理, 并通过仿真对比分析了该方法对领航AUV定位精度的影响。

表1 领航AUV航行轨迹参数设置

图5 领航AUV运动轨迹
SINS/DVL/GPS组合导航系统滤波过程中所需的初始条件如下:



图6为领航AUV正向解算得到的经纬度误差曲线, 利用SINS/DVL组合导航方式进行正向导航解算, 随着时间的增长, 领航AUV的定位误差也随之增大。图7为对领航AUV的导航信息进行逆向解算得到的经纬度误差曲线, 系统出水后引入GPS信息, 修正系统的位置误差, 同时利用SINS/DVL与SINS/DVL/GPS 2种导航方式进行独立滤波, 对领航AUV的导航信息进行逆向解算处理, 可将正向解算过程结束时刻的定位误差修正到近似为0, 然后定位误差反向递增。图8为正向解算与逆向解算相结合的领航AUV的定位误差曲线, 结合上述2种解算方式, 最终可将领航AUV在水下航行过程中积累的定位误差进行修正, 使领航AUV的定位误差得到有效收敛, 进而提升多AUV协同导航系统整体的定位性能。
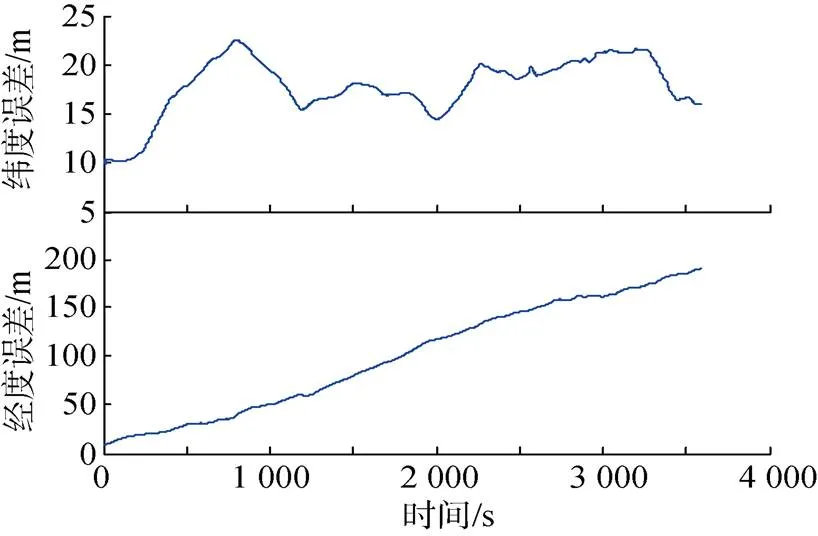
图6 领航AUV正向解算后的定位误差

图7 领航AUV逆向解算后的定位误差

图8 领航AUV正逆向结合解算后的定位误差
4 结论
针对多AUV协同导航系统中领航AUV随水下长时航行引起定位误差发散的问题, 提出了一种基于SINS/DVL和SINS/DVL/GPS组合导航相结合的领航AUV导航数据后处理方法。通过对领航AUV在水上和水下航行过程建立不同的滤波模式, 水下采用SINS/DVL组合导航方式对导航数据进行正向解算, 出水后采用SINS/DVL与SINS/DVL/GPS结合的方式进行独立滤波, 然后进行逆向递推, 逆向解算出领航AUV在水下的定位误差。最后结合正向与逆向解算结果, 对正向解算的误差结果进行修正, 以提高领航AUV的定位误差, 使得多AUV系统的定位性能得到提升, 并最终通过仿真验证了该方法的可行性与有效性。该方法虽然对领航AUV的定位误差有较为明显的改善, 但仍存在如图8所示的正向与逆向结合时的最佳交点选择, 以及领航AUV出水后需要一定的GPS搜星时间, 无法立即获取GPS信息等问题。因此对所涉及的领航AUV导航数据的后处理方法需要开展更多的研究。
[1] Bahr A, Leonard J J. Cooperative Localization for Auto- nomous Underwater Vehicle[J]. The International Journal of Robotics Research, 2009, 28(6): 714-728.
[2] Maczka D K, Gadre A S, Stilwell D J. Implementation of A Cooperative Navigation Algorithm on A Platoon of Autonomous Underwater Vehicles[C]//Oceans 2007. [S.l.]: IEEE, 2007.
[3] 高伟, 刘亚龙, 徐博, 等. 基于双主交替领航的多AUV协同导航方法[J]. 哈尔滨工程大学学报, 2014, 35(6): 735-740.
Gao Wei, Liu Ya-long, Xu Bo, et al. Multiple AUV Cooperative Navigation Based on Two Leaders Alternated Navigation[J]. Journal of Harbin Engineering University, 2014, 35(6): 735-740.
[4] 黄玉龙, 张勇刚, 赵玉新. 自主水下航行器导航方法综述[J]. 水下无人系统学报, 2019, 27(3): 232-253.
Huang Yu-long, Zhang Yong-gang, Zhao Yu-xin. Review of Autonomous Undersea Vehicle Navigation Methods[J]. Jou- rnal of Unmanned Undersea Systems, 2019, 27(3): 232-253.
[5] 张立川, 许少峰, 刘明雍, 等. 多无人水下航行器协同导航定位研究进展[J]. 高技术通讯, 2016, 26(5): 475-482.
Zhang Li-chuan, Xu Shao-feng, Liu Ming-yong, et al. Research Process of Multi-Unmanned Underwater Vehicle Cooperative and Positioning[J]. High Technology Letters, 2016, 26(5): 475-482.
[6] 陈建华, 朱海, 王超, 等. 水下SINS/DVL紧组合导航算法[J]. 海军工程大学学报, 2017, 29(2): 108-112.Chen Jian-hua, Zhu Hai, Wang Chao, et al. Underwater SINS/DVL Tightly Integrated Navigation Algorithm[J]. Journal of Naval University of Engineering, 2017, 29(2): 108-112.
[7] 曹忠义, 郑翠娥, 张殿伦. 声学多普勒速度仪安装误差校准方法[J]. 哈尔滨工程大学学报, 2013, 34(4): 434-439.Cao Zhong-yi, Zheng Cui-e, Zhang Dian-lun. Study on the Calibration of Installation Errors in An Acoustic Doppler Velocity Log[J]. Journal of Harbin Engineering University, 2013, 34(4): 434-439.
[8] 张福斌, 马朋, 刘书强. 基于距离量测的双领航AUV见协同导航算法[J]. 系统工程理论与实践, 2016, 36(7): 1898-1904.Zhang Fu-bin, Ma Peng, Liu Shu-qiang. A Cooperative Na- vigation Algorithm for Two Leader AUVs Based on Range Measurements[J]. System Engineering-Theory & Practice, 2016, 36(7): 1898-1904.
[9] 马平, 吕峰, 杜海莲, 等. 多传感器信息融合基本原理及应用[J]. 控制工程, 2006, 13(1): 48-53.Ma Ping, Lü Feng, Du Hai-lian, et al. Theory and Applica- tion of Multi-sensor Information Fusion[J]. Control Engineering of China, 2006, 13(1): 48-53.
[10] 孙进, 孙晓苏, 刘义亭, 等. 基于逆向导航解算和数据融合的SINS传递对准方法[J]. 中国惯性技术学报, 2015, 12(6): 727-732.Sun Jin, Xu Xiao-su, Liu Yi-ting, et al. Transfer Alignment Method for SINS Based on Reverse Navigation Solution and Data Fusion[J]. Journal of China Inertial Technology, 2015, 12(6): 727-732.
[11] 严恭敏, 严卫生, 徐德民. 逆向导航算法及其在捷联罗经动基座初始对准中的应用[C]//中国自动化学会控制理论专业委员会第二十七届中国控制会议论文集. 昆明: 中国自动化学会控制理论专业委员会, 2008.
A Post-Processing Method of Navigation Data for Leader AUV Based on Backward Calculating
DONG Quan-wei, YUE Cai-qian, WANG Ao-bo, WANG Ting-ting
(China Academy of Aerospace and Aerodynamics, Beijing 100074, China)
Since the leader autonomous undersea vehicle(AUV) cannot receive the external information if the multi-AUV cooperative navigation system works under water for a long time and its localization error will gradually diverge and affect the localization performance of the overall system, a post-processing method based on integrated navigation of strap-down inertial navigation system(SINS)/Doppler velocity log(DVL) and SINS/DVL/global positioning system(GPS) is proposed. Adopting SINS/DVL integrated navigation, the leader AUV processes the navigation information forwardly and stores the navigation information sampled during the process when AUV maneuvers, and then it receives the GPS information after coming out of water and uses the two navigation methods of SINS/DVL and SINS/DVL/GPS for independent filtering. After filtering, the leader AUV’s localization error accumulated under water is processed inversely to correct the localization error of the leader AUV through forward and backward calculating, so as to improve the localization performance of the overall multi-AUV system. Moreover, the feasibility and validity of the proposed post-processing method is verified through simulation. This method can be applied to underwater terrain scanning, sea chart drawing and underwater exploration to further improve localization accuracy of the underwater data sampled by multi-AUV and enhance veracity and usefulness of the data.
autonomous undersea vehicle(AUV); integrated navigation; backward calculating; post-processing
TJ6; TN967.2
A
2096-3920(2020)04-0420-08
10.11993/j.issn.2096-3920.2020.04.010
2019-12-11;
2020-01-05.
董权威(1991-), 男, 硕士, 工程师, 主要从事水下航行器导航、控制技术等研究.
董权威, 岳才谦, 王奥博, 等. 基于逆向解算的领航AUV导航数据后处理方法[J]. 水下无人系统学报, 2020, 28(4): 420-427.
(责任编辑: 杨力军)
