极地科考破冰船水下辐射噪声分析
2020-09-07黄嵘,吴刚
黄 嵘, 吴 刚
极地科考破冰船水下辐射噪声分析
黄 嵘1, 吴 刚2
(1. 中国极地研究中心, 上海, 200136; 2. 中国船舶及海洋工程设计研究院, 上海, 200011)
极地科考破冰船在开展大洋和两极科学考察时, 一方面如常规科考船一样需尽量控制自身的辐射噪声, 以确保不影响探测设备的功能; 另外一方面要求尽量减少自身辐射噪声对海洋和两极生物生存发展的影响。然而尤其是高等级破冰强度的极地科考破冰船, 其所具备的特殊船型、大功率主机、高强度螺旋桨以及可能安装于船体外的全方位推进器都会给水下辐射噪声控制带来了极大的挑战。文中介绍了某极地科考破冰船项目水下辐射噪声的前期研究。首先比较了船舶水下辐射噪声相关标准, 分析了船舶水下辐射噪声的来源, 归纳总结了抑制水下辐射噪声的方法。然后针对某极地科考破冰船的水下辐射噪声进行了实船验证, 实测中采用多水听器方法, 将测得的辐射噪声数据与国外同类船进行对比, 初步分析了目前极地科考破冰船水下噪声特性。研究结果可为开展极地科考破冰船水下辐射噪声抑制研究提供理论参考。
科考船; 极地科考破冰船; 水下辐射噪声; 多水听器
0 引言
近年来, 随着船舶航运事业的发展, 海洋噪声污染带来的问题日益突出, 由船舶引起的水下噪声是人类活动对水下环境噪声产生影响的重要因素。随着海洋资源利用程度的增加及经济全球化水平的发展, 船舶水下辐射噪声严重威胁着海洋生物的生存发展, 噪声对海洋生物特别是哺乳动物的影响, 引起了国外环境保护组织和科学家的高度关注, 国际海事组织也不断有提案涉及要求商用运输船控制水下辐射噪声的内容[1]。另一方面, 在两极特殊环境下运行的极地科考破冰船要求在不干扰海洋生物正常活动的前提下开展两极和大洋的科学考察, 更需要在特定频率范围内对水下辐射噪声进行严格控制, 以期获得自身探测设备较佳的环境场。然而尤其是高等级破冰强度的极地科考破冰船, 其所具备的破冰船型、大功率主机、高强度螺旋桨以及可能安装于船体外的全方位推进器都给水下辐射噪声控制带来了极大的挑战。采取适当的技术措施, 以使得极地科考破冰船的水下辐射噪声接近或达到国际上对新一代海洋科考船水下辐射噪声最高要求, 成为国内科学研究者追求的目标。对于船舶控制水下辐射噪声的研究, 公开发表的文章不多, 国际上针对不同船型的控制方法也仅处于结合工程实际的探索阶段。国际海洋勘察理事会(international council for the exploration of the sea, ICES)为此在1995年发布的编号为209的《考察研究报告》(Cooperative Research Report) 即ICES 209[2]中提出了水下辐射噪声的控制限制线, 报告中指出当时对于新船或改装船只的水下噪声控制策略和注意事项, 但对于采用吊舱全回转、齿轮全回转或直叶桨推进等全方位电力推进的破冰船、科考船却并无提及。因为近几年国内外出现采用类似推进形式的新船型, 故而此类船型的水下辐射噪声控制备受关注。
1 水下辐射噪声标准比较
关于船舶水下辐射噪声的指标要求, 国际上有多个研究机构和大学组织一直在进行相关研究, 但能查阅到的公开资料较少, 尤其是得到业界公认的相关标准及衡准就更少。海洋科考界最早被普遍认可的2个标准分别是: ICES 209中提出的水下辐射噪声衡准以及DNV GL船级社(Det Norske Veritas Germanischer Lloyd)SILENT Notation[3]静音船级符号的规范要求。
ICES 209 的水下噪声衡准主要针对海洋水体环境和生物种群进行研究的船只, 尤其是对海洋生物自身声学通信和信号能产生干扰的船只, 海洋生物受船舶水下辐射噪声影响的具体频率分布如图1所示[4]。例如, 针对渔业科考船, 为确保渔业资源调查时鱼群的自然分布调查结果不受到调查作业本身的干扰, 对拖网、声学法产生的水下辐射噪声进行一定的限制。
DNV GL SILENT Notation静音船级符号是世界范围内第1组关于船舶水下噪声辐射的规则, 包含5个子船级符号: R-科考调查级(Research)、A-声学设备级(Acoustics)、S-地震调查级(Seismic)、F-渔业调查级(Fishery)和E-环境友好级(Environ- mental)。其中, R、A和F与海洋科考船密切相关, 根据作业负载的不同, A和F还分别有2种不同的噪声限制线。
SILENT(R)(科考调查级)符号是基于1995年发布的ICES 209修改而来, 其对水下噪声要求非常严格,唯一区别是SILENT(R)在低于25 Hz的更低频率段放宽了要求, 如图2所示。文中噪声强度声压带级参考1 μPa@1 m。SILENT(R)符号适用于包含渔业调查在内的所有科考活动的综合科考船或其他对水下噪声非常敏感的船舶; SILENT (A)(声学设备级)符号旨在确保声学换能器使用时不受背景噪声干扰并确保其运行在最佳状态; SILENT(F)(渔业调查级)符号主要用于渔业资源调查船或与之有类似频率要求的科考船; SILENT (E)(环境友好级)符号是为了避免航行中出现过高的水下辐射噪声以保护海洋环境及海洋生物。
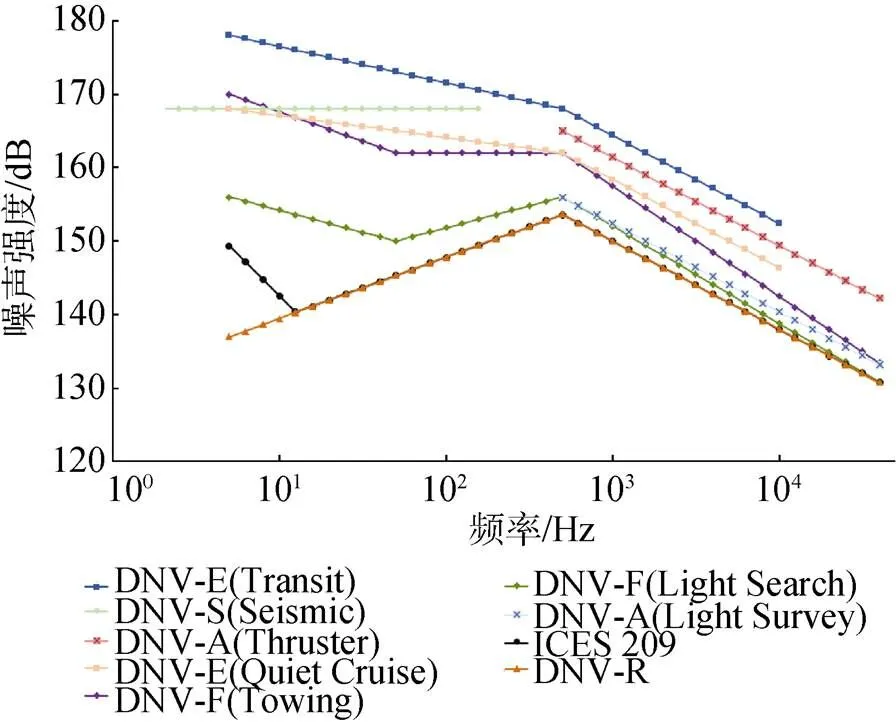
图2 DNV GL SILENT Notation和ICES 209水下噪声衡准
中国船级社(China classification society, CCS)在面对国内海洋科考船和相关船型对水下辐射噪声要求越来越高的前提下, 基于自身经验和发展需求, 在2018年结合《船舶水下辐射噪声指南》[5]的制定适时推出了水下辐射噪声附加标志(=1, 2, 3), 将水下辐射噪声分成3个等级, 等级1即UNR_1为水下辐射噪声最高要求。除了100 Hz以下, 其余均与DNV GL的最高要求SILENT(R)一致, 具体如图3所示。
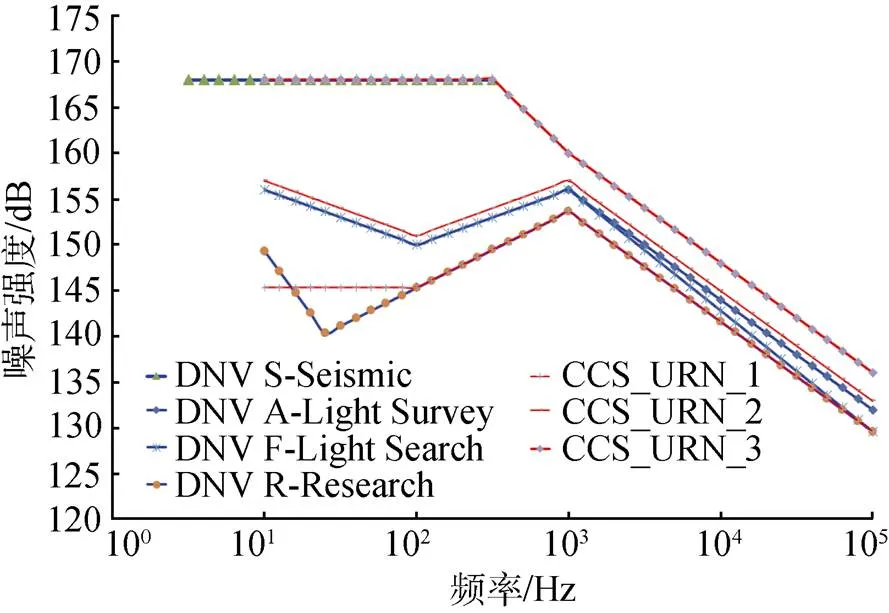
图3 CCS URN Notation和DNV GL SILENT Notation水下噪声衡准比较
2 水下辐射噪声来源
通常船舶的水下辐射噪声主要可分为以下3类: 水动力噪声[6]、机械噪声及螺旋桨噪声。由于有些科考破冰船采用全方位推进装置, 其螺旋桨噪声应扩展到水下推进器的整体噪声, 而且这类噪声往往是控制的重点和难点。其中, 水动力噪声又称作流噪声, 属于流体动力学噪声的一种, 是船舶在海面运动时形成的水流内部应力和船体与水流之间压力共同作用的结果, 其中包含由于船体曲面或附体在运动中激起的下泄气泡以及涡流带来的噪声, 如图4所示。机械噪声由主机、辅机等精密船载设备产生, 主要集中在低频段, 但由于其成分较为复杂, 且海洋背景噪声大多为低频, 因而实际提取识别时较为困难, 针对主机振动噪声的分析如图5所示。螺旋桨噪声是指高速旋转的螺旋桨在水中振动辐射产生的声波, 其中包含螺旋桨空化噪声及螺旋桨叶片振动引发的噪声, 如图6所示, 如果采用安装于船尾、浸没于水中的全方位推进装置, 这类推进器噪声除了螺旋桨噪声以外, 还有推动螺旋桨旋转的水下推进电机或齿轮传递的噪声。

图4 船体水动力噪声涡流分析示意图
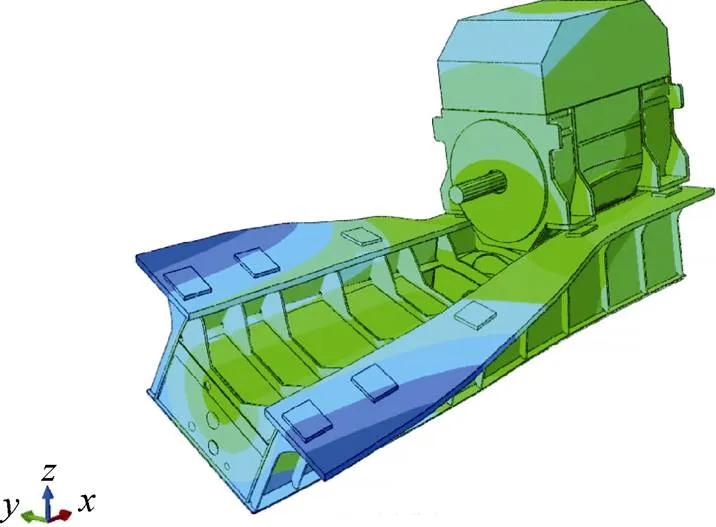
图5 主机振动噪声分析示意图

图6 针对螺旋桨噪声的空泡试验示意图
影响水下辐射噪声的全方位推进装置有吊舱全回转推进器、齿轮全回转推进器和直叶桨推进器等。这类推进装置一般安装在科考船、破冰船和海洋工程船等船型的尾部作为主推进器。它们有个共同的特点, 即利用船尾水下安装的特殊形式实现常规螺旋桨与舵的联合控制, 使其具备“舵桨合一”功能。这一特点导致水下辐射噪声级别和频率范围不同于常规螺旋桨。采用此类推进装置的船型,在建造设计之初就必须重点关注水下推进器的噪声并严格加以控制。从已获得的信息和实船试验情况来看, 吊舱全回转推进器的噪声控制主要通过优化推进电机在水下舱体内的结构与电机的振动响应, 同时有效控制电机自身的高频噪声(>1 kHz)来实现; 齿轮全回转推进器的噪声控制是通过将齿轮传递形式由Z型改为L型, 减少1对齿轮传递, 并控制齿轮传递的低频噪声来实现, 此类推进器必须关注不同航速下100 Hz~1 kHz的噪声水平, 尤其是200 Hz以下低频段; 直叶桨推进器因其结构复杂, 机械振动噪声随航速增加控制难度加大, 水下辐射噪声在<1 kHz低频段, 控制难度较大, 目前在大型远洋船舶上的实用案例较少。
3 水下辐射噪声抑制方法
对水下辐射噪声的抑制要求是对全船系统性、全过程的要求, 会对船舶线型及附体形式、推进系统、船体结构设计、设备选型和布置、空船重量重心控制、船厂生产放样和建造工艺等方方面面产生影响。噪声控制在概念设计之初就应加以分析和考虑, 将全船的振动噪声限制要求分解到各个噪声源, 提前进行减振降噪设计, 在车间和码头调试阶段进行过程控制, 并通过近场和远场测量后根据数据分析加以调整和修正, 最终达到理想效果。对于采用全方位推进的船舶, 要更加关注水下推进器噪声源的控制。以下为水下辐射噪声抑制的主要方法。
1) 优化船舶线型, 合理布置多波束等探测设备的分布位置, 减少或避免艏部线型在航行中产生的气泡下泄对声学设备的干扰[7]。
2) 主机选型时提出振动噪声控制指标, 要求制定具体的浮阀或双层隔振技术方案。
3) 尽量采用安静型、转速较低的推进电机, 必要时进行弹性安装, 尤其关注为电机伺服的风机、滑油泵等的振动噪声。
4) 采用静音螺旋桨设计, 尽量控制空泡初生和过大时的激振力[8], 同时对鸣音现象采取控制手段。
5) 如采用全方位推进器, 均需在前期通过分解的噪声指标进行具体的辐射噪声分析和控制。吊舱全回转推进器需关注水下舱体结构与电机的响应分析[9]、水下电磁噪声分析、变频器开关频率和滤波器设置等, 如图7所示。齿轮全回转推进器则需关注其齿轮推进是Z型或L型、齿轮传动比、齿轮加工精度以及齿轮啮合形式等。
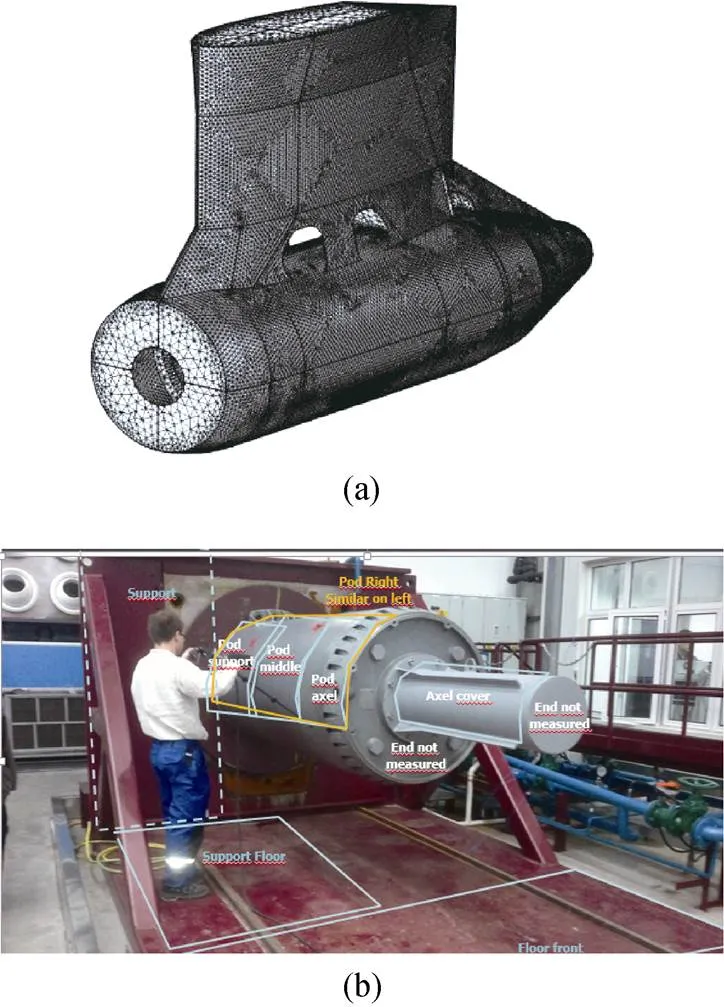
图7 吊舱推进器水下噪声控制研究
6) 总体布局上应尽量采用合理的舱室布置, 设置必要的隔离舱, 降低主机、螺旋桨等噪声源对水下辐射噪声的影响。
7) 对泵组、空压机以及风机进行隔振处理。
8) 采取必要的阻尼、吸音和消音处理措施。
4 实测分析
文中所提及目标船是一艘多功能、多学科、能在极区航行的专业科学考察破冰船, 采用国际首创的双向破冰船型设计, 船艏船艉均可破冰, 可在两极水域混有陈冰的次年海冰中航行作业。艏向和艉向航行破水平冰厚度均不低于1.5 m, 连续破冰速度2~3 kn, 续航力2×104n mile, 航程可以绕地球一圈。该船采用全电力推进系统, 动力配置为2台6960kW和2台4640kW的主机组成的柴油发电机组, 电站输电总功率约为22 eMW。为了获得在冰区优良的破冰性能, 其艉部装有2个大功率吊舱全回转推进器, 水下舱体内推进电机为转速范围15~240 r/min的同步感应电机, 其最大输出功率为7500 kW, 推进电机直接带动2个冰区强度等级为PC3的四叶螺旋桨, 直径约为4.25 m。同时该船艏部还配置有2个功率为1200 kW的隧道式侧推, 具备CCS DP2动力定位系统。
根据该船的功能定位和性能要求, 采取主机加装双层隔振、螺旋桨进行静音设计并提高加工精度等措施, 减少该船在航行工况下的水下辐射噪声; 在该船的机舱及其他处所, 采取机械设备双层隔振和必要的阻尼吸声、隔声措施以及合理的船舶型线布局设计, 以满足其科考作业时的噪声指标要求。此外, 采用吊舱式推进器虽可有效降低齿轮传动带来的机械噪声的影响, 但潜在的电磁辐射噪声的影响有待进一步测试和分析。
为获得目标船的水下辐射噪声等级, 采用“多水听器法”对目标船进行海上实测。该方法在舰艇水下噪声测量中经常采用[10]。
水下噪声频带声压级又称声压带级, 指一定频带内的水下噪声声压级, 单位dB, 按下式计算

式中:L为噪声频带声压级;p为测得的一定带宽噪声声压;p为基准声压, 通常取p=1 μPa。
举例说明: 某点某频带的声压为1Pa, 则对应声压级为120 dB。
由于测得的声压带级是滤波器带宽的函数, 且测量结果不能直接比较, 因此, 采用等效频谱级(又称声压谱级, 即带宽为 1 Hz 的理想滤波器测得的声级), 对两者进行直接转换

式中:L为谱级;L为带级;为中心频率。
举例说明: 在1/3倍频程中, 以20 Hz为例, 声压带级为150 dB, 则声压谱级(150–10lg20+ 6.3)为143.3 dB。
采用多水听器方法时, 可选取坐底式布放或船载布放进行测量, 分别如图8和图9所示。
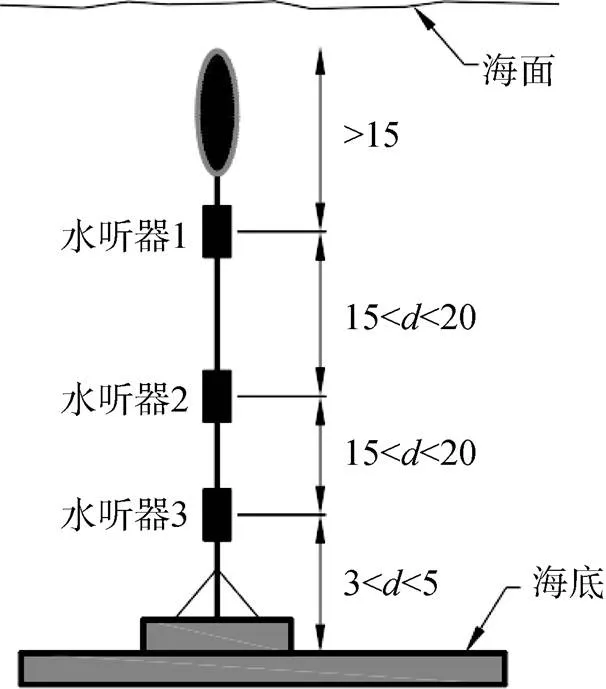
图8 坐底式布放的声学测量系统(单位: m)
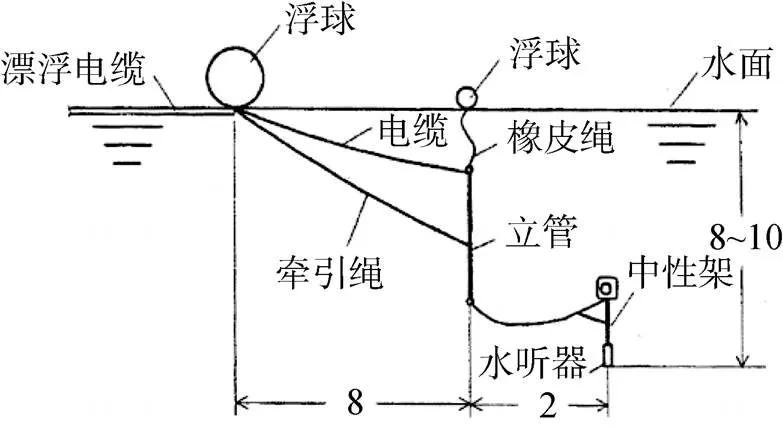
图9 船载式布放的声学测量系统(单位: m)
为不影响水声测量结果, 采用多水听器方法进行测量时, 所选测量海域应开阔、远离航道, 保证被测船舶有充足的机动范围, 且周围5 n mile内无机动船干扰, 海流流速小于1.5 kn, 并且在海况不大于3级, 且风力不大于蒲氏风级4级的条件下进行。
基于上述条件, 目标船在航速 6 kn、11 kn和15 kn分别直线航行, 不使用侧推、不拖带任何物体的工况下采用船载式布放方法测量其水下辐射噪声。将所测数据中不同深度的水听器谱级进行平均, 计算得到相应航速的频带声压级, 并与船舶水下辐射噪声衡准值进行对比, 其中6 kn 航速下的测试结果如图10所示。
水下辐射噪声测量结果表明, 目标船作为PC3等级的世界先进极地科考破冰船, 与国际同级别极地科考船相比(见图11), 具备较好的水下噪声特性。航速6 kn和11 kn时, 水下辐射噪声声源级除个别频率段外, 整体满足ICES 209的限值曲线; 尤其是250 Hz以下与1 kHz以上频段表现良好, 充分保障了科考模式下船舶声学探测设备的工作效果。但需注意的是, 在315 Hz左右范围有超出ICES 209的限值曲线, 航速越高, 此现象越突出。
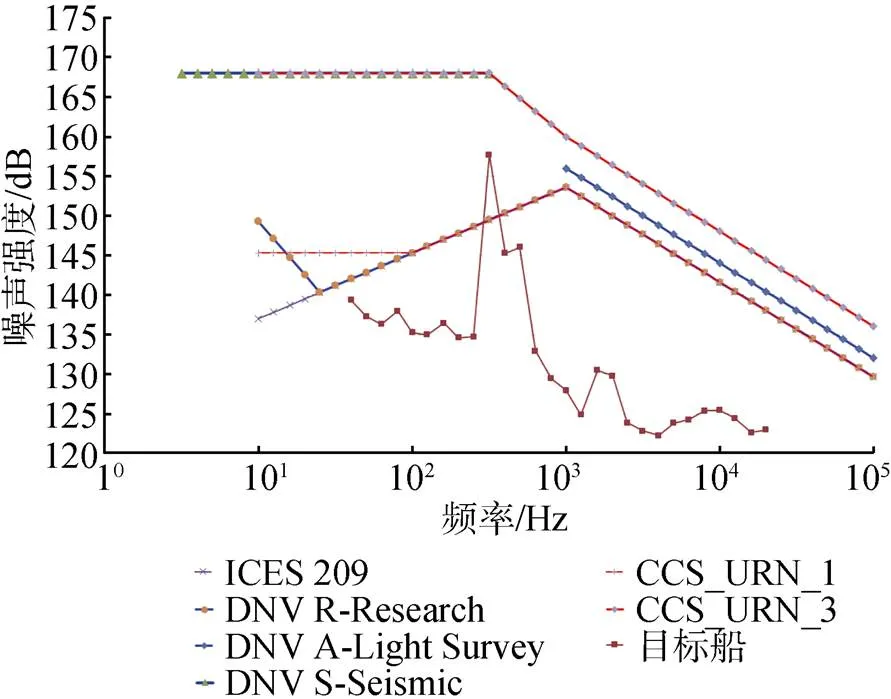
图10 声源谱级对比曲线(1/3倍频程)
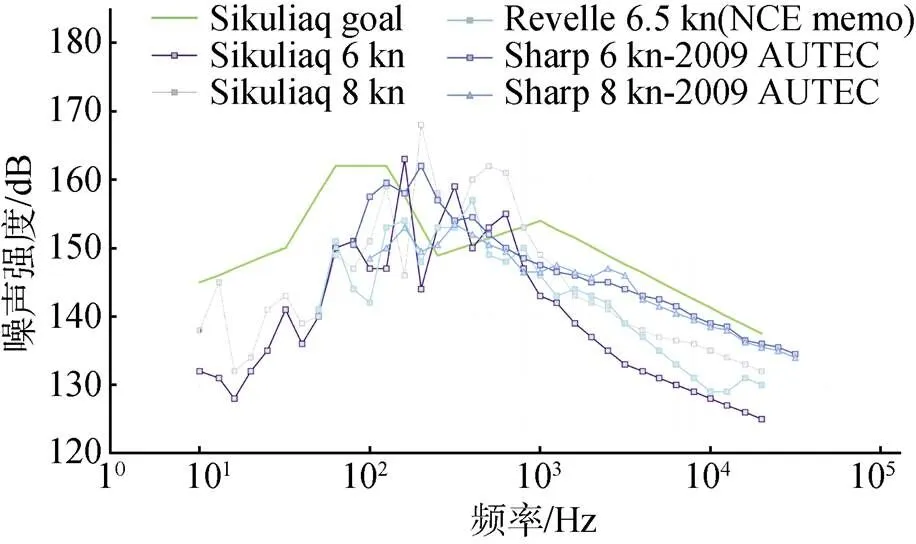
图11 国际同级别极地科考船辐射噪声曲线(1/3倍频程)
5 结束语
船舶水下辐射噪声控制往往涉及到包含噪声源的全船系统, 无论是流体噪声、机械噪声还是推进器的噪声控制都是贯穿设计和建造全过程的系统工程。极地科考破冰船因其高功率配置的动力系统以及特殊船型和尾部推进器, 使得水下噪声控制难度加大。文中在介绍水下辐射噪声标准、不同噪声源噪声抑制方法的同时, 针对全方位推进器提出了水下噪声控制需特别关注的地方,并以某极地科考破冰船的噪声实测和分析为例指出当前极地科考破冰船水下噪声特性。下一步工作将结合实测详细结果, 针对具体的振动频率和噪声源开展分析并得出进一步的控制方法, 为开发建设新的极地科考破冰船积累经验。
[1] ASCOBANS. IMO MEPC.1/Circ.833: Guidelines for the Reduction of Underwater Noise from Commercial Shipping to Address Adverse Impacts on Marine Life[R/OL]. (2014-07-30)[2019-10-22]. https://www.ascobans.org/en/ docment/imo-mepc1circ833-guidelines-reduction-underwater-noise-commercial-shipping-address-adverse.
[2] Mitson R B. Underwater Noise of Research Vessels Review and Recommendations, Cooperative Research Report No.209[R]. [S.l.]: International Council for the Exploration of the Sea, 1995.
[3] Det Norsk Veritas. DNV-GL Rules for Classification, Part 6 Additional Class Notations, Chapter 7[S]. Dublin: Det Norsk Veritas, 2018.
[4] Rasmussen M H, Diving Deeper into the Sound of Blue Whales[J]. Waves, 2015(6): 24-30.
[5] 中国船级社. 船舶水下辐射噪声指南[R/OL]. (2018-10- 15)[2019-10.22].https://www.ccs.org.cn/ccswz/font/fontAction!article.do?articleId=4028e3d666135c3901667587b9b60103.
[6] 李环, 刘聪尉, 吴方良. 水动力噪声计算方法综述[J]. 中国舰船研究, 2016, 11(2): 72-89.
Li Huan, Liu Cong-wei, Wu Fang-liang, et al. A Review of the Progress for Computational Methods of Hydrodynamic Noise[J]. Chinese Journal of Ship Research, 2016, 11(2): 72-89.
[7] 张亚, 葛彤, 吴刚. 科考船多波束导流罩线型CFD分析方法与试验验证[J]. 船舶工程, 2015, 37(4): 9-11.
Zhang Ya, Ge Tong, Wu Gang. CFD Analytical Method and Experimental Verification for Fairing of Multi-beam Echo Sounder on Research Vessel[J]. Ship Engineering, 2015, 37(4): 9-11.
[8] 马飞. 螺旋桨空化及噪声性能研究[D]. 哈尔滨: 哈尔滨工业大学, 2014.
[9] Kimmo K. Azipod® Underwater Noise Control for SILENT-R Notation[R]. [S.l.]: ABB, 2017.
[10] 富志凯, 邢建春, 王双庆, 等. 一种舰船辐射噪声线谱检测新方法[J]. 舰船科学技术, 2013, 35(12): 37-41.
Fu Zhi-kai, Xing Jian-chun, Wang Shuang-qing, et al. A New Method of Detecting the Line-spectrum from the Ship-radiated Noise[J]. Ship Science and Technology, 2013, 35(12): 37-41.
Analysis of Underwater Radiated Noise of Polar Icebreaking Research Vessel
HUANG Rong1, WU Gang2
(1. Polar Research Institute of China, Shanghai 200136, China; 2. Marine Design & Research Institute of China, Shanghai 200011, China)
For the polar icebreaking research vessel with high icebreaking capacity, the control of the underwater radiated noise(URN) will be a great challenge because of its special ship-type, high-power main engine, high-strength propeller and optional 360° azimuth propulsion unit out of ship hull. In this paper, the previous research on URN of a polar icebreaking research vessel is introduced. The related standards of URN of vessels are compared, the sources of URN are analyzed, and the methods for suppressing URN are summarized. Then, the URN of the polar icebreaking research vessel is tested, in which the multi-hydrophone method is used for measuring the radiated noise. The measured URN data are compared with that of similar foreign vessels, and the URN characteristics of the polar icebreaking research vessel are analyzed. This research may provide a reference for the research of URN suppression for polar icebreaking research vessel.
research vessel; polar icebreaking research vessel; underwater radiated noise(URN); multi-hydrophone
U661.44; TB565.1
A
2096-3920(2020)04-0370-06
10.11993/j.issn.2096-3920.2020.04.003
2020-03-18;
2020-04-11.
黄 嵘(1976-), 男, 本科, 高级轮机长, “雪龙2”新船建设工程部总工艺师, 主要从事极地船舶动力研究;
吴 刚(1978-), 男, 研究员, “雪龙2”总设计师, 主要从事破冰船和科考船总体设计与研究工作.
黄嵘, 吴刚. 极地科考破冰船水下辐射噪声分析[J]. 水下无人系统学报, 2020, 28(4): 370-375.
(责任编辑: 许 妍)
