水下声学滑翔机平台噪声测试与优化
2020-09-07孙芹东兰世泉
王 超, 韩 梅, 孙芹东, 兰世泉
水下声学滑翔机平台噪声测试与优化
王 超1,2, 韩 梅1,2, 孙芹东1,2, 兰世泉2,3
(1. 海军潜艇学院, 山东 青岛, 266199; 2.青岛海洋科学与技术试点国家实验室, 山东 青岛, 266237; 3. 天津大学 机械工程学院, 天津, 300350)
为了提高水下声学滑翔机水中目标探测能力, 更好地开展矢量水听器在水下滑翔机上的应用, 文中通过在消声水池对现有“海燕-II”水下滑翔机进行的自噪声测试试验, 定量分析了4种不同工况下平台噪声对矢量水听器各通道接收信号的影响, 由试验结果可知: 水下滑翔机上集成的矢量水听器接收信号会受到严重的平台近场噪声干扰, 特别在500 Hz以下的低频段, 平台噪声对矢量水听器矢量通道的影响较大; 在40 Hz频点处, 由于航向调节机构工作对矢量水听器矢量通道具有最大58 dB的谱级升高。针对水下滑翔机平台噪声测量结果, 从5方面进行了减振降噪处理和优化, 测试结果表明, 平台优化后较之前由航向调节机构对矢量水听器产生的噪声干扰大幅降低, 但在200 Hz以下的低频段, 航向调节机构工作对矢量水听器矢量通道仍具有较大的噪声干扰。所得结论可为水下声学滑翔机在进行水中目标探测时的频率处理范围选择提供参考。
水下声学滑翔机; 矢量水听器; 平台噪声; 减振降噪
0 引言
近年来, 随着传感器技术及水声信号处理的发展, 水下滑翔机在水中目标探测方面的应用得到了高度重视。我国在水下滑翔机平台集成声学系统方面成果显著, 中科院声学所通过在水下滑翔机艏部舱段安装声矢量探测系统, 并在2014年完成了湖上和海上测试试验, 但试验只进行了声学系统对单频信号的探测性能, 测试效果不理想且测试内容不完善[4]。同年, 海军潜艇学院和天津大学合作, 通过在现有“海燕-II”水下滑翔机平台上集成矢量水听器, 成功研制出了可用于水中目标探测的水下声学滑翔机原理样机[5],如图1所示。

图1 水下声学滑翔机示意图
当前, 水下滑翔机主要用于海洋环境观测任务。声学系统工作时对水下滑翔机平台自噪声非常敏感, 但涉及相关影响以及平台减振降噪处理方面的研究则相对较少。中科院声学所于2016年对水下滑翔机电池滑动、油泵启动和电池滚动3种工况条件下平台噪声进行了测试[6-8], 由于测试过程中声压水听器没有安装在水下滑翔机平台上, 没有准确测量到水下滑翔机电池滑动过程的平台噪声, 且没有提出平台噪声优化方案。在南海某海域开展的基于水下滑翔机平台海洋环境噪声观测试验, 由于平台自噪声影响, 导致800 Hz和1 600 Hz高频段海洋环境噪声谱级大于100 Hz和200 Hz的低频段[9]。为了更好地开展矢量水听器在水下滑翔机平台上的应用工作, 海军潜艇学院在消声水池多次开展了水下滑翔机各工况下的自噪声测量试验, 分析水下滑翔机平台噪声对矢量水听器各通道接收信号的影响, 并根据试验结果进行了平台减振降噪处理和优化, 测试表明降噪处理后的水下滑翔机平台自噪声显著降低, 这对提高水下声学滑翔机水中目标探测能力具有十分重要的意义。
1 水下滑翔机平台噪声分析
对水下滑翔机平台各工况下的辐射噪声进行有效测量, 得到水下滑翔机自噪声声源分布及其特性是指导减振降噪措施的实施和平台优化的前提, 同时也是保证水下声学滑翔机进行水中目标探测的关键。
一般来讲, 水下滑翔机的自噪声主要分为水动力噪声、螺旋桨噪声和机械噪声3大类。水下滑翔机在剖面滑翔工作模式下最大水平滑翔速度约为1 kn, 且矢量水听器外部有聚氨酯导流罩保护, 可将水动力噪声的影响控制到很小。同时, 水下声学滑翔机进行水下目标探测任务时, 主要采用剖面滑翔工作模式, 只有发现可疑目标紧急上浮报警以及遇到其他突发状况时才会启动螺旋桨。因此, 机械噪声是水下滑翔机平台噪声的主要噪声源。在整个水下滑翔机剖面滑翔工作阶段, 姿态调节单元和浮力调节单元对机械噪声的贡献最大, 其中姿态调节单元包括俯仰调节机构和航向调节机构两部分。俯仰调节机构通过沿平台中轴线前后移动电池包进行俯仰角调节, 实现平台上浮和下潜运动; 而航向调节机构则通过绕平台中轴线转动电池包进行横滚角调节, 当滑翔机偏离计划航向时完成航向控制。当水下滑翔机下潜至最大工作深度时, 油泵电机启动开始工作, 将液油排到油囊以增加滑翔机平台的浮力, 使其完成由下潜到上浮的过渡。水下滑翔机在剖面滑翔过程中, 俯仰调节机构和浮力调节单元只有在水面准备下潜阶段和水下最大工作深度准备上浮阶段工作, 而航向调节机构则需一直工作来实时调整航向, 因此, 水下滑翔机机械噪声中要着重考虑航向调节机构自噪声影响。
2 水下滑翔机声学探测系统
水下滑翔机平台可采集长时间、大深度和大范围的水中声学数据, 是开展水中目标探测的优势平台之一, 很多研究成果已充分显示了水下滑翔机平台在水声学领域的重要应用前景[10-12]。海军潜艇学院研制的水下声学滑翔机搭载的声学载荷为一种大深度同振式矢量水听器, 与声压水听器相比, 其提供了更加全面的声场信息, 大大提高了声场分析的能力, 在水下滑翔机平台上集成单个矢量水听器即可实现水中目标的全空间无模糊测向, 降低了平台的搭载负担和集成复杂度。
图2为矢量水听器实物图, 其设计指标为: 工作频带20 Hz~5 kHz, 声压通道灵敏度级≥–192 dB (0 dB=1 V/μPa), 矢量通道灵敏度级≥–180 dB(1 kHz), 质量约450 g(空气中), 外形尺寸为66 mm×78 mm, 最大耐压深度1 200 m。

图2 矢量水听器实物图
矢量水听器除了有大深度耐压设计外, 各部分还进行了电磁屏蔽处理, 可有效降低矢量水听器各通道自噪声。图3给出了矢量水听器在消声水池测量得到的20 Hz~4 kHz频带范围内的自噪声谱级, 为了便于比较, 同时还给出了Knudsen曲线0级、1级、3级和6级海况下海洋环境噪声谱级随频率的变化曲线[13]。
本研究中所有数据经过SPSS20.0软件处理,以(±s)表示计量资料,两组症状消失时间及β-HCG恢复时间的比较经t检验,计数资料采用百分比表示,两组疗效及不良反应的比较经χ2检验。P<0.05则提示数据差异具有统计学意义。
由图3可以看出: 1) 矢量水听器声压通道(通道)自噪声谱级在整个频率范围内均小于0级海况海洋环境噪声; 2) 矢量水听器矢量通道自噪声谱级随频率降低而增大, 每倍频程增大约8 dB, 这使得矢量通道自噪声在低频段达到最大, 并高于6级海况海洋环境噪声, 这是矢量通道灵敏度随频率的降低而减小所致(每倍频程减小约6 dB); 3) 矢量水听器矢量通道与声压通道自噪声谱级差异随频率降低而增大, 由4 kHz频点2 dB谱级差异增大到20 Hz频点处最大37 dB的谱级差异。

图3 矢量水听器自噪声测试曲线
3 水下滑翔机平台噪声测试和优化
为更好地开展矢量水听器在水下滑翔机平台上的应用, 文中深入分析了天津大学“海燕-II”平台噪声对矢量水听器各通道接收信号的干扰影响, 并对“海燕-II”平台进行了减振降噪处理和优化。
3.1 水下滑翔机平台噪声测试
由于水下滑翔机在水下工作时存在电池滑动、电池转动、油泵启动和螺旋桨转动等辐射噪声, 水下声学滑翔机在水中接收目标信号的同时也会受到这些噪声信号的干扰, 因此有必要对水下滑翔机各种工作状态下的辐射噪声进行测量, 以指导平台进行减振降噪处理和优化。为进一步对“海燕-II”平台噪声基本特性进行深入分析, 定量描述平台各噪声源对矢量水听器声压通道和矢量通道的影响, 先后在国家深海基地管理中心消声水池进行了水下滑翔机电池滑动、电池转动、油泵启动和螺旋桨转动4种工况下的自噪声测试试验。试验测试布局如图4所示, 试验过程采用分步运转法测试水下滑翔机各工况平台自噪声。
图5~图7分别给出了同振式矢量水听器声压通道、矢量通道(方向垂直水下滑翔机机身)和矢量通道(方向平行水下滑翔机机身)测量得到的水下滑翔机在4种工况下的噪声谱级与相应各通道自噪声级的对比结果, 该结果是由矢量水听器接收水下滑翔机各工况下平台噪声数据并采用1/3倍频程谱计算方法处理得到的。

图4 水下声学滑翔机平台噪声测试布局示意图

图5 水下声学滑翔机各工况下矢量水听器声压通道噪声谱级
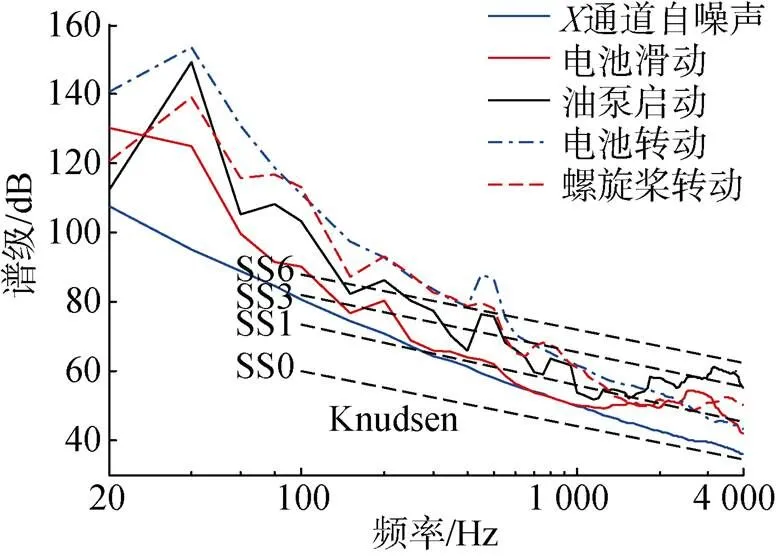
图6 水下声学滑翔机各工况下矢量水听器矢量X通道噪声谱级
由图5~图7可知, 水下滑翔机在4种工况下产生的噪声级均明显大于各通道自噪声, 且在200 Hz以下的低频段对矢量通道的影响明显大于对声压通道的影响; 在800~950 Hz频段范围内, 由声压通道测量的油泵启动噪声谱存在很高的平台峰, 该平台峰对应的噪声谱级在这4种测试工况中最大; 在100~500 Hz频段范围内, 电池滑动、油泵启动和螺旋桨转动3种工况下对矢量通道的影响大于对矢量通道的影响, 而电池转动在该频段范围内对两通道的影响基本一致。

图7 水下声学滑翔机各工况下矢量水听器矢量Y通道噪声谱级
由以上测试结果可知, 水下滑翔机平台上集成的声学系统在电池滑动、电池转动、油泵启动和螺旋桨转动4种工况下均会受到严重的近场干扰, 因此需要对水下滑翔机平台进行减振降噪处理和对声学系统工作模式进行优化。由于水下滑翔机在剖面滑翔过程中需要实时调整航向, 航向调节机构无法停止工作, 因此尤其需要对水下滑翔机航向调节机构产生的自噪声进行详细分析。
图8为水下滑翔机航向调节机构工作期间矢量水听器声压通道采集到的时域噪声信号, 图中可看出由航向调节机构产生的噪声脉冲干扰, 这是由于“海燕-II”滑翔机是通过电磁抱闸实现转向机构自锁并进行航向控制, 而抱闸开关会对机构产生较强的脉冲激励, 从而引起较强的振动噪声。
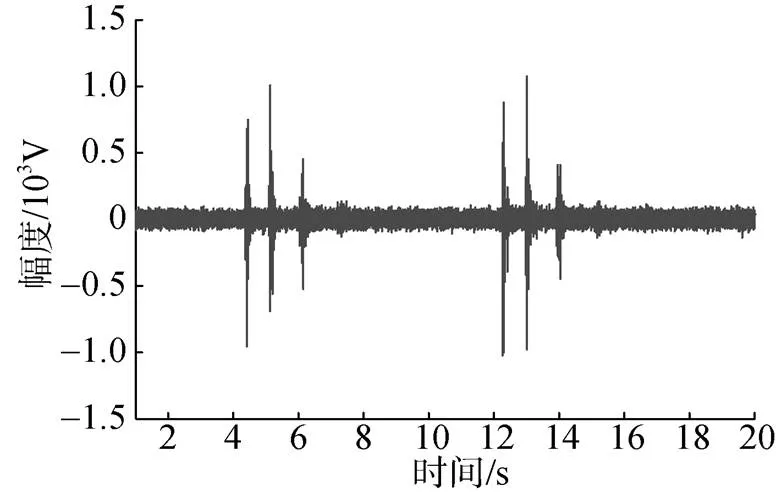
图8 航向调节机构工作阶段时域信号
图9为水下滑翔机航向调节机构工作时矢量水听器各通道噪声谱级, 图10给出了航向调节机构开始工作时,矢量水听器各通道噪声谱级升高值。由图中可知, 在500 Hz以下的低频段, 航向调节机构对矢量通道的影响较大, 其中40 Hz频点处,矢量通道具有最大58 dB的谱级升高;在1500~ 2 500 Hz频段范围内, 声压通道也具有20 dB以上的谱级升高, 这将严重影响水下声学滑翔机水中目标探测性能, 因此需要对水下滑翔机航向调节机构进行减振降噪处理, 同时优化航向调节机构控制策略来降低水下滑翔机平台自噪声水平。

图9 航向调节机构工作时矢量水听器噪声谱级

图10 航向调节机构开始工作时矢量水听器噪声升高谱级
3.2 水下滑翔机减振降噪措施和优化
由以上分析可知, 水下滑翔机在剖面滑翔过程中, 声学系统主要受航向调节机构产生的电磁抱闸振动噪声影响, 文中依据噪声产生、传播及干扰机理, 主要从优化转向调节机构、优化转向控制策略、阻断噪声传播途径、电磁兼容性优化设计和优化声学系统工作模式5个方面进行水下声学滑翔机平台减振降噪处理和优化。
1) 优化转向调节机构
海洋环境观测水下滑翔机是通过电机和齿轮传动机构带动偏心重物实现航向控制, 电磁抱闸实现转向机构自锁。抱闸开关因对机构产生较强的脉冲激励而引起壳体振动噪声, 齿轮传动机构在啮合时也会产生噪声, 驱动电机进行电子转向时也具有转矩波动噪声, 这些噪声都严重干扰声学系统信号的接收。为避免电磁抱闸产生的振动噪声, 降低齿轮的啮合噪声, 并消除驱动电机转矩噪声, 选用带自锁功能的蜗轮蜗杆进行水下滑翔机横滚角调节, 从而避免电磁抱闸噪声; 同时, 蜗轮蜗杆啮合平稳, 可降低齿轮的啮合噪声; 通过在滚转机构驱动电机上增加编码器, 提高电机转动控制精度, 从而消除力矩波动, 提高滚转重物转动的平稳性。以上这些转向调节机构优化方案, 都将降低水下滑翔机转向调节机构转动的自噪声对声学系统的干扰影响。
2) 优化转向控制策略
为确保水下滑翔机转向调节机构转速稳定, 驱动电机采用速度闭环控制, 采用比例-积分-微分(proportion-integral-derivative, PID)算法进行转速调节, 但由于偏心重物转动时属于变载荷, 难免会引起电机转速波动, 如PID参数选用不合适将加剧振动, 甚至引起振动发散。针对驱动电机载荷变化的特殊情况进行PID参数优化, 选用最优PID参数, 提高转向调节机构的转动稳定性, 从而降低振动噪声。并根据水下滑翔机性能需求合理设置电机转速, 使滚转机构产生的噪声频率远离目标探测监测范围, 从而避免滚转机构对声学系统产生的不利影响。
3) 阻断噪声传播途径
水下滑翔机平台振动噪声主要由结构体的传导传播和空间辐射传播2种传播途径影响声学系统, 通过在声学载荷、转向调节机构和水下滑翔机壳体之间设计占用的阻尼结构, 阻断振动噪声由转向调节机构向声学载荷的传播途径。针对噪声的辐射传播, 通过在水下滑翔机壳体内壁喷涂橡胶吸声材料, 并在水下滑翔机内部布置吸声结构, 从而降低噪声的辐射传播。
4) 电磁兼容性优化设计
水下滑翔机转向调节机构为变载荷, 会引起驱动电机电流波动, 从而影响水下滑翔机干端电路供电的稳定性, 这将对声学系统正常工作产生不利影响。为保证声学系统工作的稳定性, 对现有水下滑翔机平台进行电磁兼容性优化, 设计声学系统独立耐压舱段, 屏蔽电磁辐射干扰, 并采用独立的隔离型电源供电, 阻断电磁传导干扰。
5) 优化声学系统工作模式
水下滑翔机在水下进行目标探测任务时, 采用剖面滑翔工作模式。水下滑翔机在水面下潜阶段、最大工作深度上浮阶段和遇到突发状况需要启动螺旋桨时, 声学系统均断电停止工作, 通过优化声学系统工作模式可消除水下滑翔机电池滑动、油泵启动和螺旋桨转动产生的平台噪声。
图11给出了水下滑翔机减振降噪处理和优化后, 航向调节机构工作期间, 矢量水听器声压通道采集到的时域噪声信号。与图8比较可知, 水下滑翔机平台优化后消除了由航向调节机构产生的噪声脉冲干扰。图12和图13分别给出了水下滑翔机平台优化后航向调节机构工作时, 矢量水听器各通道噪声谱级, 以及航向调节机构开始工作时, 矢量水听器各通道噪声谱级的升高值。图14为水下滑翔机平台优化后较优化前航向调节机构工作期间矢量水听器各通道噪声降低情况。

图11 优化后航向调节机构工作阶段时域信号

图12 优化后航向调节机构工作时矢量水听器噪声谱级

图13 优化后航向调节机构开始工作时矢量水听器噪声升高谱级

图14 航向调节机构优化后较优化前噪声降低谱级
由图12~图14可知: 1) 水下滑翔机平台优化后向调节机构对矢量水听器产生的噪声干扰大幅降低, 较优化前, 矢量水听器声压通道在2 kHz频点处具有最大25 dB的噪声降低, 而矢量通道在80 Hz频点处则具有最大28 dB的噪声降低; 2) 优化后,矢量水听器声压通道噪声谱级在水下滑翔机航向调节机构工作期间仍具有5 dB左右的升高, 但在整个频率范围内小于0级海况海洋环境噪声; 3) 优化后, 水下滑翔机航向调节机构工作时对矢量水听器矢量通道仍具有较大的噪声干扰, 特别是在100 Hz以下的低频段, 由水下滑翔机航向调节机构产生的辐射噪声对矢量水听器矢量通道具有10 dB以上的噪声干扰, 且在40 Hz频点处具有最大40 dB的噪声影响; 4) 优化后, 水下滑翔机航向调节机构工作期间矢量水听器矢量通道在200 Hz以下的低频段噪声仍较大且高于6级海况海洋环境噪声, 因此水下声学滑翔机在水中进行目标探测时, 频率处理范围应选在200 Hz以上的高频段。
4 结束语
文中分析了现有“海燕-II”平台主要噪声源, 并在消声水池进行了水下滑翔机在4种工况下的自噪声测量试验, 定量描述了水下滑翔机平台噪声对同振式矢量水听器各通道接收信号的影响。由试验结果可以看出, 水下滑翔机平台上集成的矢量水听器在水下滑翔机的4种工况下均会受到严重的近场噪声干扰, 特别是在40 Hz频点处由于航向调节机构工作而具有最大58 dB的谱级升高。针对水下滑翔机平台噪声测量结果, 文中从5个方面进行了水下滑翔机平台减振降噪处理和优化, 测试结果表明, 优化后水下滑翔机平台的航向调节机构对矢量水听器产生的噪声干扰大幅降低, 且航向调节机构工作期间矢量水听器声压通道噪声谱级在整个频率范围内小于0级海况海洋环境噪声, 但在100 Hz以下的低频段, 航向调节机构工作对矢量水听器矢量通道仍具有较大的噪声干扰。
基于水下声学滑翔机的目标探测技术已成为水中目标无人机动监测能力建设的重要支撑, 如何实现长时间、高隐蔽、大范围、低成本及实时的水中目标探测是目前面临的巨大挑战。文中的研究结果是在消声水池测量得到, 为得到更准确的水下滑翔机各工况条件下的平台噪声水平, 还需进一步在水下滑翔机正常剖面滑翔工作模式下测试分析水下滑翔机平台噪声, 并开展平台减振降噪优化措施。
[1] 沈新蕊, 王延辉, 杨绍琼, 等.水下滑翔机技术发展现状与展望[J].水下无人系统学报, 2018, 26(2): 89-106.Shen Xin-rui, Wang Yan-hui, Yang Shao-qiong, et al. Dev- elopment of Underwater Gliders: An Overview and Pros- pect[J]. Journal of Unmanned Undersea Systems, 2018, 26 (2): 89-106.
[2] 俞建成, 刘世杰, 金文明, 等.深海滑翔机技术与应用现状[J]. 工程研究-跨学科视野中的工程, 2016, 8(2): 208-216.Yu Jian-cheng, Liu Shi-jie, Jin Wen-ming, et al. The Present State of Deep-sea Underwater Glider Technologies and Applications[J]. Journal of Engineering Studies, 2016, 8(2): 208-216.
[3] 朱心科, 金翔龙, 陶春辉, 等.海洋探测技术与装备发展探讨[J].机器人, 2013, 35(3): 376-384.
Zhu Xin-ke, Jin Xiang-long, Tao Chun-hui, et al. Discuss- ion on Development of Ocean Exploration Technologies and Equipments[J]. Robot, 2013, 35(3): 376-384.
[4] 王赞. 水下滑翔机声矢量探测系统研究与实现[D]. 北京: 中国科学院大学, 2014.
[5] 王文龙, 王超, 韩梅, 等. 矢量水听器在水下滑翔机上的应用研究[J]. 兵工学报, 2019, 40(12): 2580-2587.Wang Wen-long, Wang Chao, Han Mei, et al. Application Re- search of Vector Hydrophone Onboard an Underwater Glider [J]. Acta Armamentarii, 2019, 40(12): 2580-2587.
[6] 刘璐, 兰世泉, 肖灵, 等.基于水下滑翔机的海洋环境噪声测量系统[J].应用声学, 2017, 36(4): 370-376.Liu Lu, Lan Shi-quan, Xiao Ling, et al. Measurement System of Ambient Sea Noise Based on the Underwater Glider[J]. Journal of Applied Acoustics, 2017, 36(4): 370-376.
[7] 刘璐, 肖灵, 刘亭亭. 水下滑翔机机械噪声基本特性研究[J].声学技术, 2017, 36(5): 221-222 Liu Lu, Xiao Ling, Liu Ting-ting. Study on Basic Char- aeristics of Underwater Glider’s Mechanical Noise[J]. Technical Acoustics, 2017, 36(5): 221-222.
[8] 刘璐, 肖灵.混合驱动水下滑翔机自噪声测量及分析[J].中国舰船研究, 2017, 12(4): 132-139.Liu Lu, Xiao Ling. Measurement and Analysis of Selfn- oise in Hybrid-driven Underwater Gliders[J]. Chinese Journal of Ship Research, 2017, 12(4): 132-139.
[9] Liu L, Xiao L, Lan S Q, et al. Using Petrel II Glider to Analyze Underwater Noise Spectrogram in the South China Sea[J]. Acoustic Australia, 2018, 46(2): 1-8.
[10] Wall C C, Lembke C, Mann D A. Shelf-scale Mapping of Sound Production by Fishes in the Eastern Gulf of Mexico, Using Autonomous Glider Technology[J]. Marine Ecology Progress, 2012, 449: 55-64.
[11] Uffelen L J V, Roth E H, Howe B M, et al. A Seaglider Integrated Digital Monitor for Bioacoustic Sensing[J]. IEEE Jo- urnal of Oceanic Engineering, 2017, 42(4): 800-807.
[12] Wall C C, Mann D A, Lembke C, et al. Mapping the Soundscape Off the Southeastern USA by Using Passive Acoustic Glider Technology[J]. Marine & Coastal Fish- eries, 2017, 9(1): 23-37.
[13] 笪良龙, 王超, 卢晓亭, 等.基于潜标测量的海洋环境噪声谱特性分析[J].海洋学报, 2014, 36(5): 54-60.Da Liang-long, Wang Chao, Lu Xiao-ting, et al. The Ch- aracteristic Analysis of Ambient Sea Noise Spectrum Based on Submersible Buoy[J]. Acta Oceanologica Sinica, 2014, 36(5): 54-60.
Noise Measurement and Optimization of Underwater Acoustic Glider Platform
WANG Chao1,2, HAN Mei1,2, SUN Qin-dong1,2, LAN Shi-quan2,3
(1. Navy Submarine Academy, Qingdao 266199, China; 2. Pilot National Laboratory for Marine Science and Technology (Qingdao), Qingdao 266237, China; 3. School of Mechanical Engineering, Tianjin University, Tianjin 300350, China)
A self-noise test was conducted on the Petrel-II underwater glider in an anechoic pool to improve the application of vector hydrophones to underwater gliders. The influences of platform noise on the received signals of each channel of the vector hydrophone under four conditions were analyzed quantitatively. The results show that the signal received by the integrated vector hydrophone on the underwater glider is critically interfered by the near-field noise of the platform because the platform noise greatly affects the vector channel of the vector hydrophone particularly in the low frequency range below 500 Hz. At the 40 Hz frequency point, the maximum spectral level of the vector hydrophone’s vector channel is increased to 58 dB because of the course adjustment mechanism. According to the noise measurement results of the underwater glider platform, the vibration and noise reduction and the optimization are performed in five aspects. Test results show that the noise interference generated by the course adjustment mechanism on the vector hydrophone is greatly reduced after platform optimization. However, the course adjustment mechanism generates significant noise interference on the vector channel of the vector hydrophone in the frequency range below 200 Hz. This study may provide a reference for the selection of frequency processing range of underwater acoustic gliders in underwater target detection.
underwater acoustic glider; vector hydrophone; platform noise; vibration and noise reduction
TJ630; TB56; P733.22
A
2096-3920(2020)04-0396-07
10.11993/j.issn.2096-3920.2020.04.007
2019-10-01;
2019-12-18.
国家重点研发计划(2019YFC030313); 青岛海洋科学与技术试点国家实验室“问海计划”项目(2017WHZZB0601).
王 超(1988-), 男, 博士, 助理研究员, 主要研究方向为水声信号处理和水下无人平台应用技术.
王超, 韩梅, 孙芹东, 等. 水下声学滑翔机平台噪声测试与优化[J].水下无人系统学报, 2020, 28(4): 396-402.
(责任编辑: 杨力军)
