水下地形辅助导航适宜地图分辨率的选取
2020-09-07徐振烊张静远
徐振烊, 王 鹏, 张静远
水下地形辅助导航适宜地图分辨率的选取
徐振烊1,2, 王 鹏1, 张静远1
(1. 海军工程大学 兵器工程学院, 湖北 武汉, 430033; 2. 中国人民解放军91991部队, 浙江 舟山, 316000)
针对目前水下地形辅助导航用数字地图分辨率选取不明而制约导航性能发挥的问题, 根据某海域真实水深数据建立了水下地形数字高程模型; 借鉴误差传递思想, 基于递推贝叶斯理论和质点滤波理论,对小起伏和大起伏2种典型地形区分别从解析和仿真角度给出了地形辅助导航用适宜的地图分辨率; 然后,基于地形轮廓匹配(TERCOM)算法对不同地形下数字地图分辨率与匹配误差的定量关系进行了多项式回归分析, 进一步确定了适宜的地图分辨率。结果表明, 解析分析结果与数值仿真结果大致相当, 相互佐证了研究结果的合理性; 不同地形匹配区对适宜分辨率的要求不同, 小起伏区和大起伏区适宜地图分辨率参考范围大致分别在13 m和25 m左右, 大起伏区对地图分辨率的要求较小起伏区低; 数字地图分辨率与匹配误差关系近似服从多次曲线变化规律。研究成果可为水下地形辅助导航中数字地图制作、分辨率选取及水下测量工作提供相关参考。
水下地形辅助导航; 数字地图分辨率; 质点滤波; 地形轮廓匹配算法; 匹配误差
0 引言
考虑到自身安全性、隐蔽性等需要, 潜艇、无人水下航行器、鱼雷、自航水雷等水下航行器将惯性导航作为主要导航定位手段, 但鉴于其导航误差会随时间逐渐累积的固有缺陷, 须借助相关辅助手段, 以实现远程精确自主导航定位[1-2]。水下地形辅助惯性导航技术可有效降低水下航行器的导航定位误差, 增强隐蔽性, 提高生存能力, 已成为世界各国海军装备发展的热门研究领域[3-5]。其基本原理如图1所示, 利用海底丰富的地形信息, 通过相关匹配算法, 将测量设备实时测得的地形水深数据与数字地图数据库中的高程数据进行相关匹配运算, 推算出当前水下航行器的位置, 以修正惯性导航系统误差[6-7]。
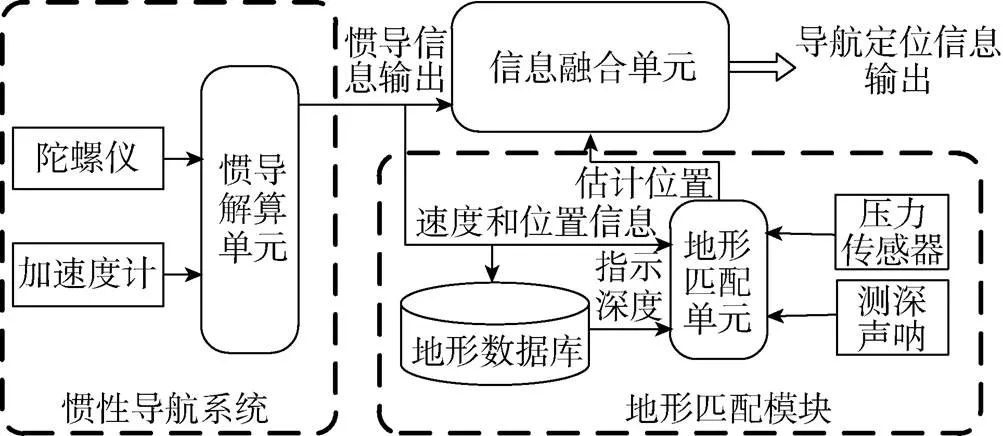
图1 水下地形辅助导航系统原理图
目前, 国内外针对水下数字地图的构建、匹配算法提出和改进等开展了较多的研究[8-10], 但针对水下数字地图分辨率的公开研究相对较少, 制约了地形辅助导航性能的更好发挥[11]。而数字地图分辨率又关乎地形匹配精度及效率, 分辨率太低则无法精确提供地形信息, 易造成误匹配; 分辨率过高则会占用大量存储内存, 影响计算效率, 使导航效果不佳[12]。张亚南等[13]基于原始数字高程模型(digital elevation models, DEM)计算数据信息盒维数, 分析信息盒维数与分辨率的关系, 从而确定适宜的DEM分辨率。朱伟等[14]尝试从信息论的角度出发, 引入信息熵的概念来度量不同分辨率的DEM所包含的地形信息量, 得到地形信息熵随分辨率的变化曲线, 确定适宜的DEM分辨率。王英钧[15]利用分辨率为100 m的数字地图, 采用地形轮廓匹配(terrain contour matching, TERCOM)算法仿真得到29 m的附加误差, 提出如果利用分辨率更高(25 m或50 m)的地图数据源, TERCOM算法则可以得到更好的定位精度。吕文涛等[16]研究了不同飞行条件对地形匹配组合导航精度的影响, 提出在实际应用地形辅助导航时, 需综合考虑匹配精度要求和存储能力等因素, 选择合适分辨率的数字地图。
前人多从地形信息表达程度与DEM适宜分辨率的关系进行相关研究, 而对分辨率与导航性能的内在关系研究甚少或不深入, 未能给出明确恰当的地图分辨率。鉴于此, 文中建立了某海域水下DEM, 通过线性插值法制备了多分辨率数字地图; 而后, 基于质点滤波(point mass filter, PMF)算法, 对数字地图分辨率与匹配定位误差的定量关系进行了解析研究, 给出了不同地形下水下地形辅助导航用适宜的地图分辨率大小; 最后, 采用TERCOM算法对二者定量关系进行了仿真, 进一步分析了数字地图分辨率和导航定位精度的关系, 综合给出不同地形特征下确切数字地图分辨率选定依据, 为后续水下地形辅助导航用数字地图的制作、匹配区选取及数据采集测量工作提供相关参考。
1 数字高程模型建立
水下环境相比陆上复杂, 测量难度较大且工作量大, 高清图像实时获取比较困难, 因此通常选择DEM来表达水下地形信息。DEM是数字地图的基础与核心, 是一种用数字形式表示地表形态和空间位置信息的空间信息模型。水下数字地图构建的过程实际上是将测量数据转化为特定DEM结构的过程[17-18]。DEM对地形的表征模型主要分为规则网格结构模型、不规则三角形网模型和等高线模型3种。鉴于规则网格结构模型便于数据存储、分析和计算等优点, 文中采用正方形规则网格结构模型。
水下地形分布不均匀、非线性强, 利用随机过程模拟生成地形不能真实地反映地形实际特征及分布情况, 因此文中选取真实海域数据构建水下数字地图。选取我国台湾海峡附近东经117.508 3°~ 117.708 1°, 北纬21.238 0°~23.104 6°海域真实水深数据、南海部分海域水深数据进行后续仿真研究, 将数据按一定的网格尺寸划分成二维网格结构, 建立水下数字地图如图2所示。

限于目前技术条件、水下环境等多方面因素的制约, 水深测量数据不足且测深点离散、分布不规则, 制备的水下数字地图分辨率较低, 无法满足水下辅助导航的需求。为了研究地图分辨率对导航性能的影响, 需对原始水深数据进行插值预处理[19]。待插值点附近数据的搜索效率及内插函数模型是影响DEM表征地形优劣的2个关键因素[20-21]。常用的插值方法主要有双立方插值法、最近邻插值法和双线性插值法等。其中, 双线性插值法计算量较小, 精度基本满足要求,因此, 文中采用双线性插值法进行数据预处理,得到相关水域分辨率为8, 9,…, 15, 20, 25, …, 125 m的水下数字地图, 以备后续之用。
2 解析分析
2.1 非线性系统模型建立
首先给出水下航行器系统状态方程

其次给出系统观测方程







假设高斯概率密度

2.2 定位误差滤波计算模型
基于递推贝叶斯理论[22-24], 将模型进行贝叶斯积分处理。Z表示0~时刻所有测量值的集合。
其中
(13)
最小均方差估计为

预测更新
积分很难通过解析方法求解, 需要通过数值离散进行计算, 因此可以通过质点滤波来实现。




测量更新



预测更新
2.3 适宜匹配区的选取
为了给后续计算分析提供较为理想的地形信息源, 对匹配区地形可导航性进行分析, 选取适宜的地形匹配区, 将所选的南海某海域匹配区域精细划分为6个大小为4 000 m×3 000 m的子区域, 水下二维划分图如图3所示, 编号分别为Ⅰ~Ⅵ, 对应水下三维地形如图4所示。
根据文献[28]计算各子区域特征参数值及评价指标值。根据评判结果, 对各子区域的可导航性进行排名。各子区域特征参数值如表1所示。
对表1特征参数值进行处理, 计算各子区域的可导航评价指标。
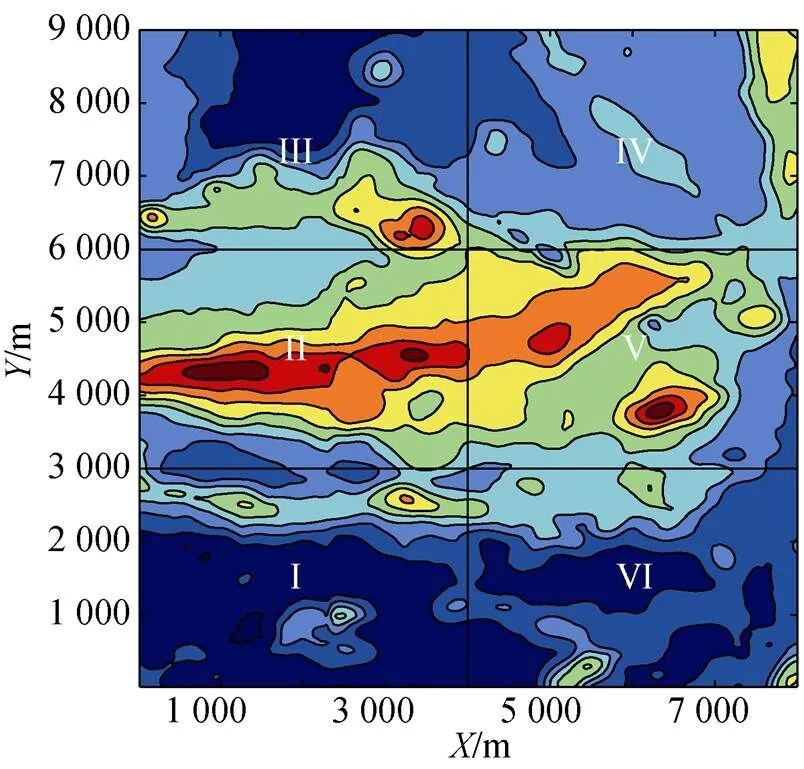
图3 水下地形二维图
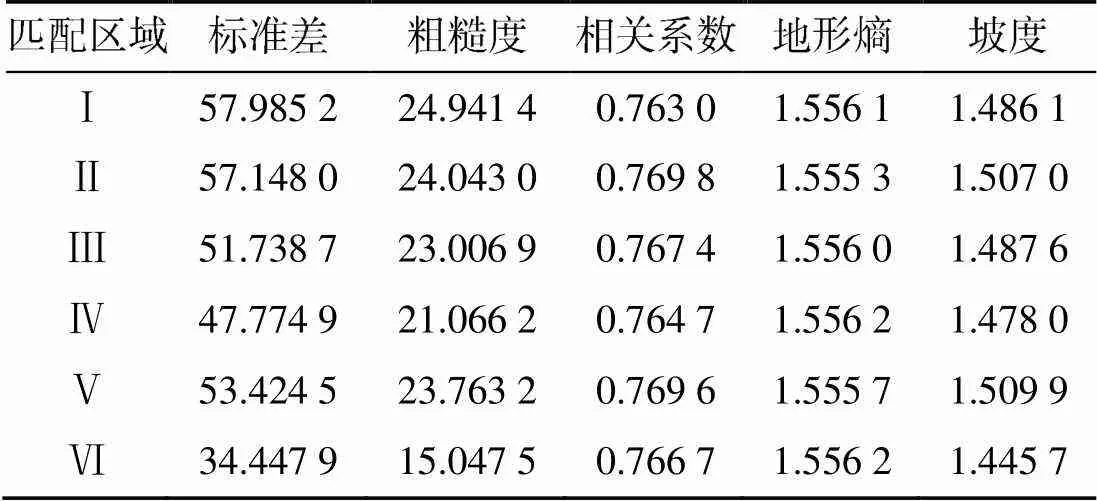
表1 各子区域地形特征参数值
1) 构建评价指标矩阵

2) 对指标矩阵进行归一化处理

3) 构建多目标关联评判矩阵
4) 计算指标权重

5) 计算加权向量关联度集
在各子区域中分别进行匹配定位仿真, 随机对各子区域中的100条航路进行匹配定位, 每条航路进行100次蒙特卡洛仿真, 取其平均值作为匹配结果, 如表2所示。

表2 各子区域仿真评价结果
根据数值计算和仿真可知, 两者结果一致, 各子区域的地形可导航性能力强弱排序为Ⅰ>Ⅱ>Ⅴ>Ⅲ>Ⅳ>Ⅵ,区域Ⅰ和区域Ⅵ可分别作为后续计算用的大起伏和小起伏地形信息源。
2.4 搜索区域适宜网格分辨率的确定
在地图分辨率一定的情况下, 匹配性能与算法搜索区域的网格大小有关, 理论上搜索网格越精细, 计算出的匹配误差越准确, 但计算时间也会相应增加。网格尺寸越大, 真实位置和匹配位置落在同一个网格里的概率就越大, 匹配误差被系统认定为零的几率就越大, 就会造成误差计算不精细。为确定相对适宜的搜索区域网格分辨率, 选取南海部分海域水下数字地图作为仿真基准地图。出于计算处理方便等方面的考虑, 搜索区域网格和数字地图网格均为等间隔正方形规则网格, 因此网格尺寸通常为2的指数倍数关系, 将搜索区域网格分辨率设定为地图分辨率的0.5、1、2和4倍的合理范围内, 水下地形局部放大匹配航迹如图5所示。以500次蒙特卡洛仿真的均方根误差作为匹配误差评价主指标, 误差均值作为辅指标, 仿真结果如表3及图6所示。
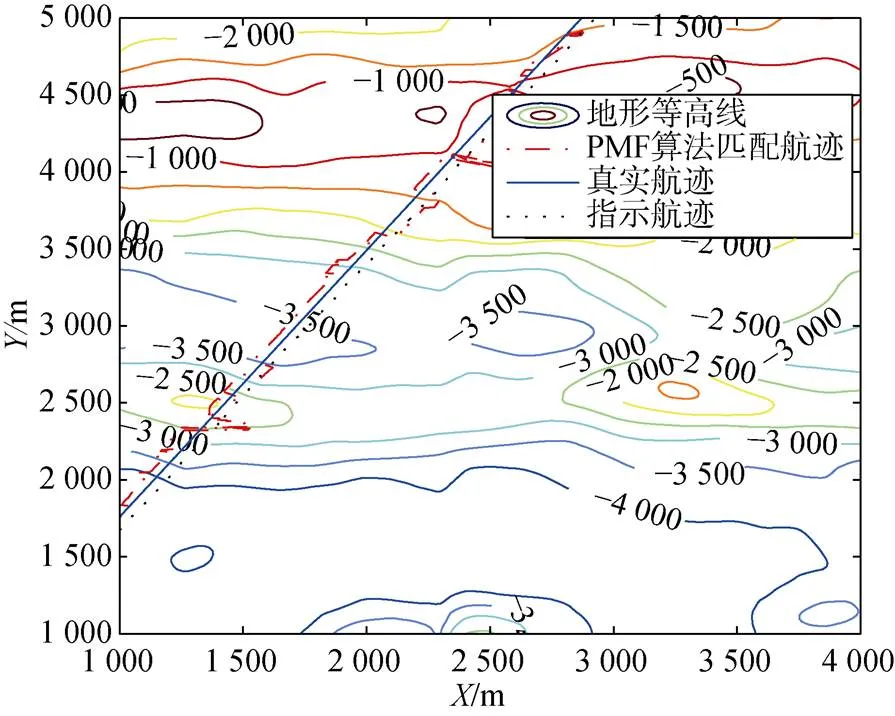
图5 水下地形匹配航迹
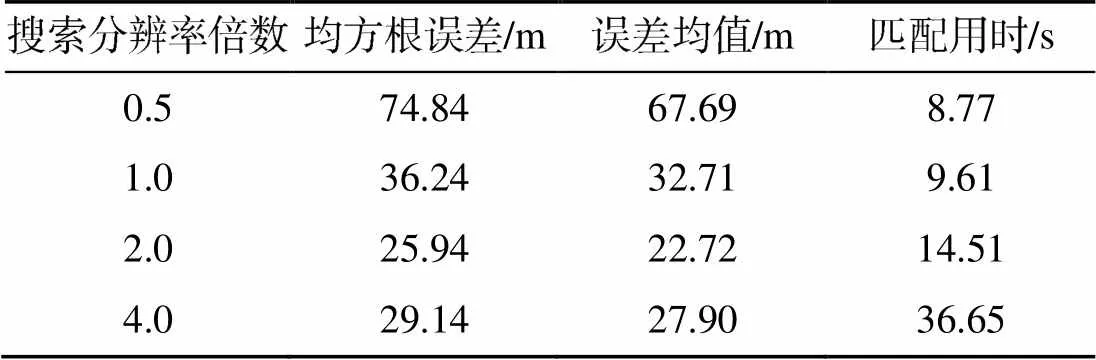
表3 不同搜索分辨率对应的匹配结果
从表3及图6可以看出, 搜索分辨率从0.5倍提高到2倍时, 匹配误差随着搜索区域网格分辨率的提高而减小, 匹配效果提升明显; 搜索分辨率从2倍提高到4倍时, 误差抑制效果不明显, 反而大大增加了计算时间。在地图分辨率一定的条件下, 由于受到地图分辨率的限制, 一味地提高搜索分辨率会大大增加计算量和匹配用时, 降低匹配效率, 而误差抑制效果却得不到明显提升,因此, 适当提高搜索分辨率有利于匹配误差的抑制, 综合考虑匹配误差和效率, 搜索区域网格分辨率为地图分辨率的2倍时, 匹配效果最佳。
2.5 适宜地图分辨率的确定
2.2节给出了定位误差计算模型, 确定了定位误差与地图搜索区域网格分辨率的数学关系, 根据2.4节讨论分析, 当搜索区域网格分辨率设为地图分辨率的2倍时, 匹配效果相对较好。根据2.3节分析结果, 选取适宜匹配区的地形高程作为计算数据源, 其他可控条件设定为相对理想状态。具体计算步骤如下:
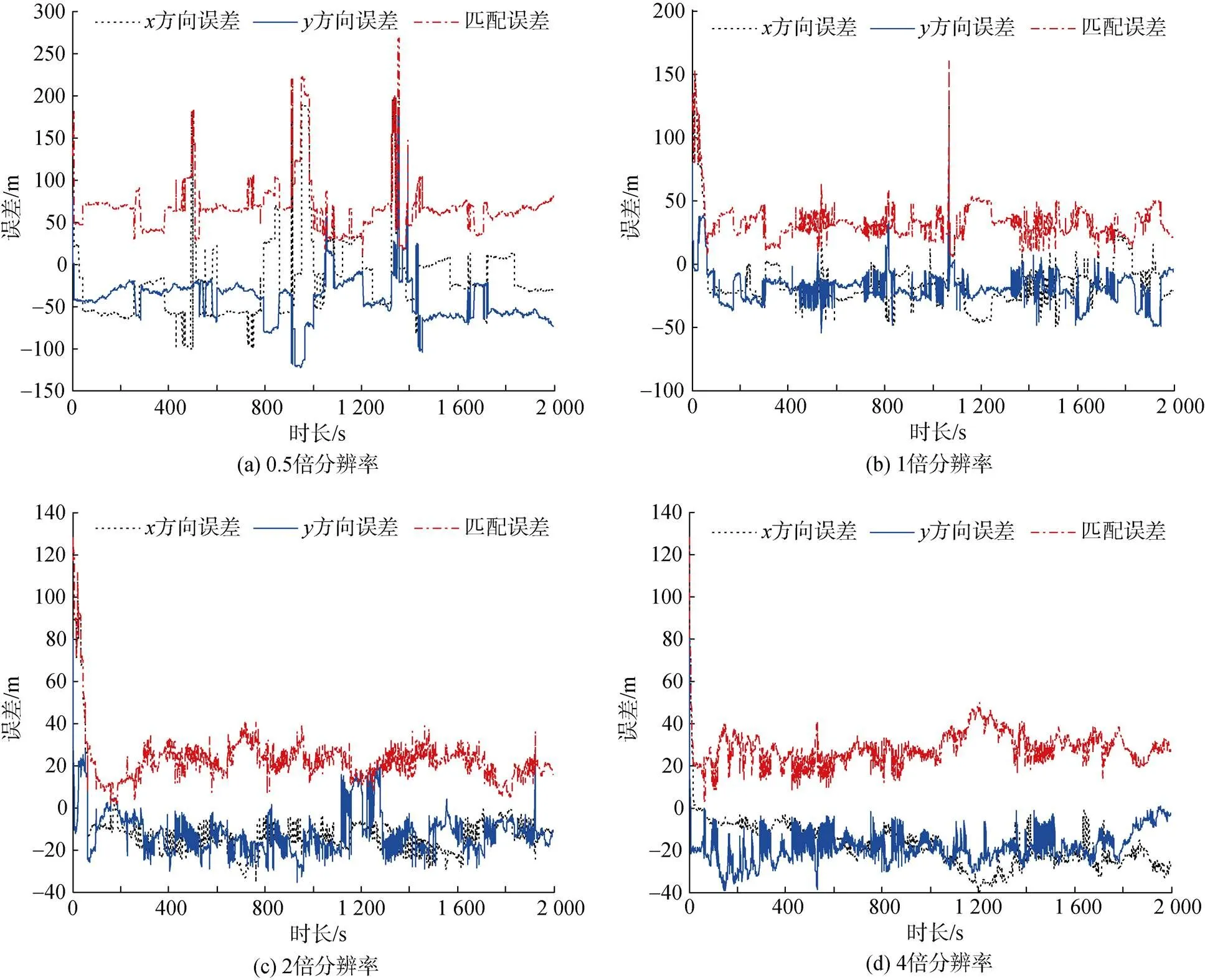
图6 不同搜索分辨率对应的匹配误差

8) 返回第2步, 直至全部值计算完毕, 分析匹配点定位误差的均方根误差值, 找到最小误差值对应的适宜地图分辨率。
通过计算得知, 2种典型地形下存在一个相对适宜的分辨率, 并非地图分辨率越高越好。地图分辨率过高, 极易造成数据冗余和地形相似, 不利于匹配效果的最佳发挥; 分辨率过低, 导航可用的地形信息不足, 更加不利于匹配性能的发挥。地形丰富的匹配区, 地图分辨率在22~34 m范围内时, 定位误差相对较小; 地形起伏较小的匹配区, 地图分辨率在12~20 m范围内时, 定位误差相对较小, 小起伏地形区和大起伏地形区数字地图分辨率大致分别在16 m和32 m时的匹配误差最小。
3 数值仿真分析
从仿真角度探究适宜地图分辨率, 以佐证第2章研究结果的合理性。均方根误差反映了匹配航迹偏离真实航迹的程度, 能够较好地反映匹配效果, 以500次蒙特卡洛仿真的均方根误差作为匹配误差评价主指标, 误差均值作为辅指标, 如无特别说明, 其他仿真条件设定如表4所示。

表4 仿真参数设定
3.1 地图分辨率对匹配性能影响的定性分析
为定性分析地图分辨率对匹配性能的影响, 选取图2(a)所示南海某部分海域作为匹配区, 该区域地形起伏较大, 信息差异性明显, 便于分析。采用PMF算法, 分别选取分辨率为20、30、40 m的数字地图进行仿真分析, 匹配航迹如图7所示, 对应匹配误差如图8所示, 均方根误差分别为34.529 0、28.073 1、67.473 9 m, 误差均值分别为54.8836、32.7960、99.0785 m。
从图8及匹配误差可以看出, 系统在不同的地图分辨率下表现出不同的匹配性能, 不同分辨率下的匹配误差排序为30 m分辨率<20 m分辨率<40 m分辨率, 30 m分辨率下的误差收敛速度最快且趋于稳定, 20 m次之, 40 m收敛最慢。综合分析, 30 m分辨率下的匹配效果优于20 m, 20 m优于40 m, 可以看出并非地图分辨率越高, 匹配误差越低, 打破了人们对分辨率与匹配误差关系的传统预期和认识,所以, 并不能机械地认为数字地图分辨率越高导航效果越好, 这就需要对数字地图分辨率进行研究。另外, 选取的分辨率较少, 仅能定性地说明匹配性能好坏与分辨率密切相关, 要想较为确切地找到其间的某种关系, 还需要做进一步的分析。
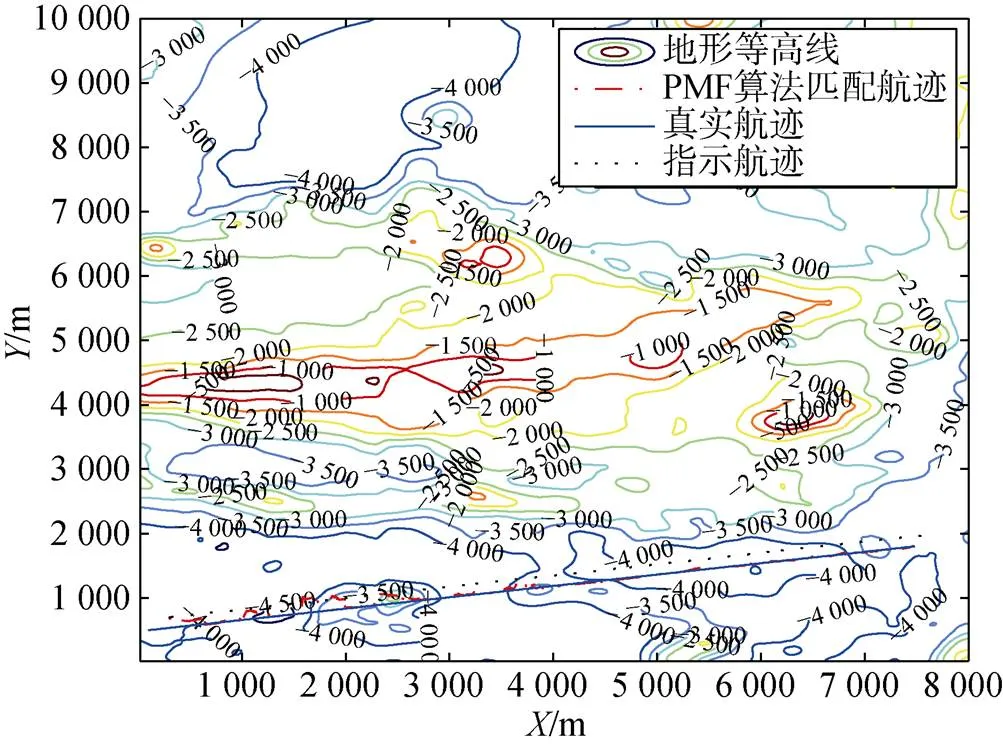
图7 大起伏水下地形匹配航迹
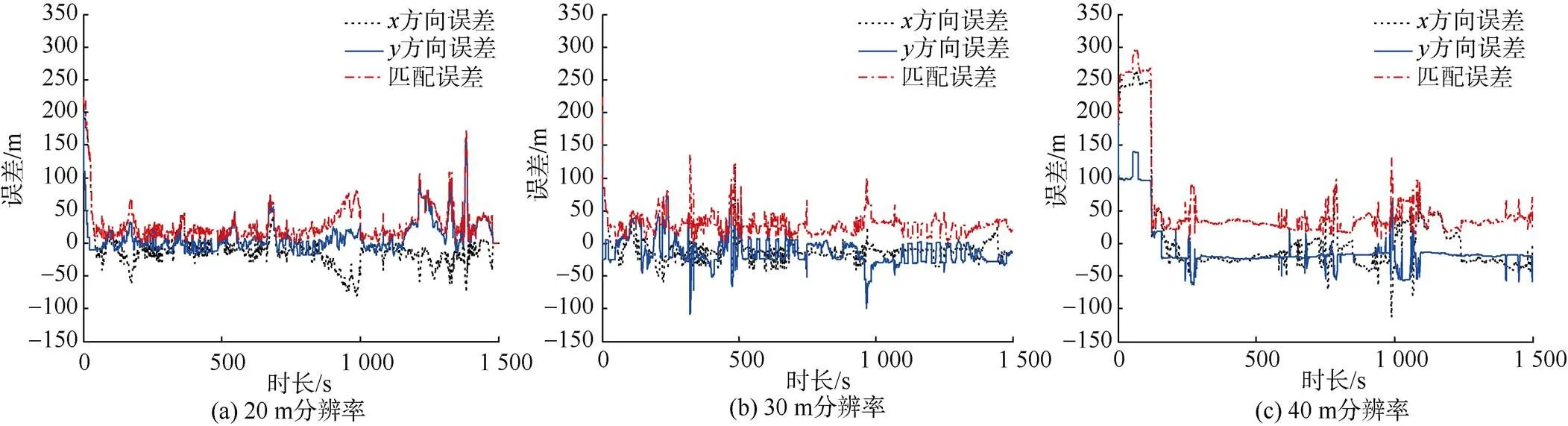
图8 不同地图分辨率下的匹配结果
3.2 地图分辨率与导航精度关系
为了进一步分析数字地图分辨率与导航精度间的内在关系, 采用经典、成熟的TERCOM算法对台湾海峡附近部分水域的真实水深数据进行仿真佐证分析。
不同特征的地形下可能对应不同的适宜分辨率, 文中在对适宜地图分辨率分析时将地形分为数据点平均起伏度大于50 m的大起伏地形和平均起伏度小于50 m的小起伏地形2种典型地形。选取图2(b)所示台湾海峡附近海域作为匹配区。为了进一步探究分辨率与匹配结果的内在关系, 接下来分别分析小起伏、大起伏地形区地图多分辨率对匹配误差的影响, 地图分辨率取值为8, 9, …, 15, 20, 25, …, 125 m, 不同数字地图分辨率下对应的散点匹配误差及其回归曲线关系如图9所示。
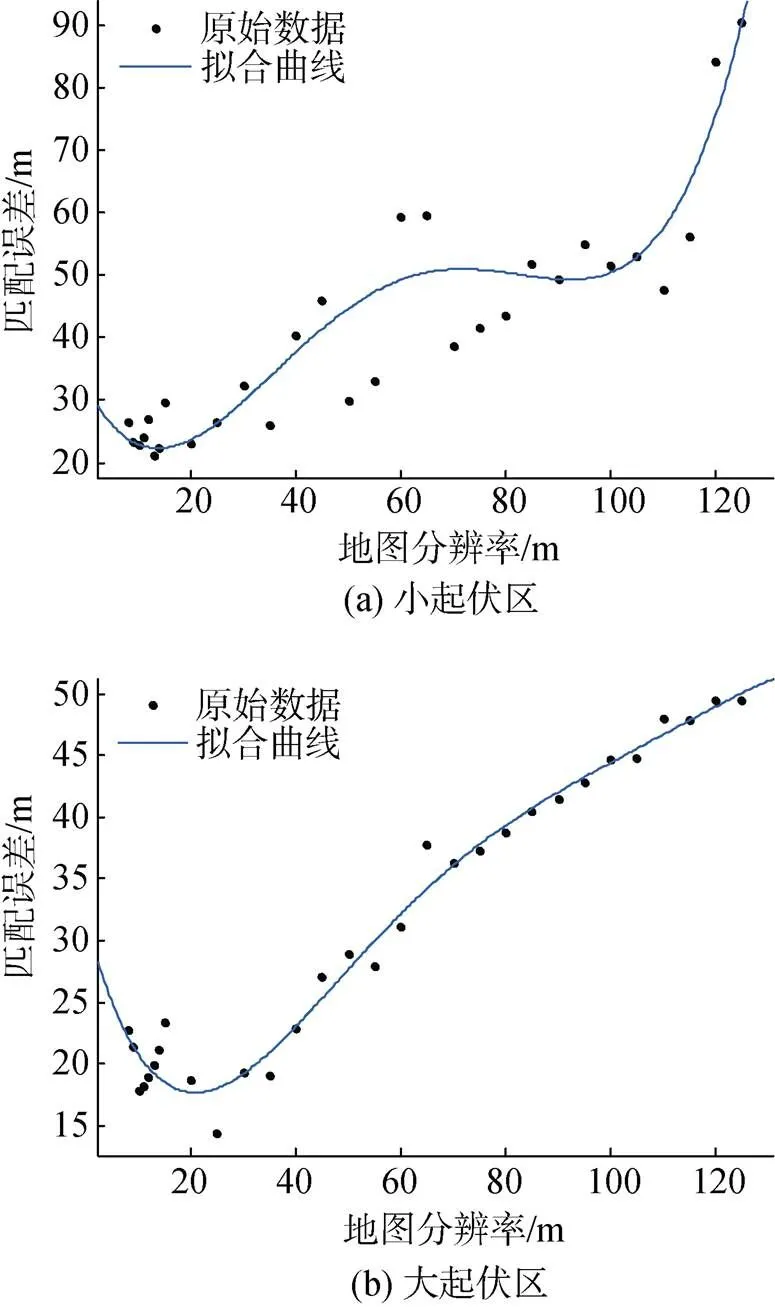
图9 地图分辨率与匹配误差曲线关系
小起伏区拟合曲线方程为

大起伏区拟合曲线方程为

式中:大()为大起伏区匹配误差;1= –1.018×10–8;2=4.517×10–6;3= –7.589×10–4;4= 5799×10–2;5= –1.579;6= 31.45。
从图9中可以看出, 地图分辨率高低直接影响了算法的匹配效果, 大起伏匹配区适宜分辨率范围大概在25 m左右, 小起伏匹配区适宜分辨率范围大概在13 m左右, 相比大起伏区, 小起伏区确定的适宜分辨率较高, 用以弥补地形信息不足带来的影响。小起伏区比大起伏区地形信息相对匮乏, 分辨率低会导致总匹配序列减小, 地形辅助导航作用不明显, 容易出现较大的误匹配, 因此匹配时需要较高的地图分辨率以满足导航需求, 便于更好地提取地形信息, 而大起伏区地形信息丰富, 匹配所需的适宜地图分辨率较小起伏区低。理论上讲, 分辨率越高, DEM就越接近于实际地形, 导航越精确, 然而对于实际应用而言, 地图分辨率过高或过低均不利于系统匹配性能的发挥, 过于追求高分辨率不仅会增加数据处理工作量, 而且在实际应用中起不到明显的改善效果。分辨率过低, 地形信息匮乏, 影响匹配效果; 而分辨率过高, 会由于地形相似性大而造成数据冗余和误匹配, 影响匹配效果, 同时也会占用较大存储空间, 造成资源的格外浪费, 降低匹配效率。适当降低分辨率, 会使匹配效果提升, 主要是因为在地图分辨率降低的同时, 采样间隔也随之增加, 较大的采样间隔加大了匹配序列间的深度差异, 在提高测量信息信噪比的同时, 也有助于避免小范围相似地形对相关批处理的影响, 从而改善算法的匹配效果。因此, 根据实际需要选择适宜的地图分辨率显得尤为重要。
4 结束语
文中从提高水下地形辅助导航性能出发, 对数字地图分辨率开展了相关研究。分析并给出了水下地形辅助导航用数字地图的适宜分辨率; 基于TERCOM算法, 利用多项式回归分析法进一步确定了2类典型特征地形下数字地图分辨率与匹配误差的定量关系。分析结果表明, 不同的地图分辨率对导航性能有着不同的影响, 小起伏地形区对适宜分辨率的要求较大起伏区高, 小起伏区适宜地图分辨率在解析和仿真上大致分别为16 m和 13 m, 大起伏区适宜地图分辨率在解析和仿真上大致分别为32 m和25 m, 数字地图分辨率与匹配误差关系近似服从多次曲线变化规律, 解析分析与仿真分析结果相互佐证了分析结果的科学性。研究成果可为水下地形辅助导航用数字地图制作、分辨率尺度变换及水下测量等工作提供参考, 具有较为广泛的应用价值和现实意义。
[1] Kim Y, Park J, Bang H. Terrain-referenced Navigation Using an Interferometric Radar Altimeter[J]. Navigation, 2018, 65(2): 157-167.
[2] Claus B, Bachmayer R. Terrain-aided Navigation for an Underwater Glider[J]. Journal of Field Robotics, 2015, 32(7): 935-951.
[3] Wadhams P. The Use of Autonomous Underwater Vehicles to Map the Variability of Under-ice Topography[J]. Ocean Dynamics, 2012, 62(3): 439-447.
[4] 张静远, 谌剑, 李恒, 等. 水下地形辅助导航技术的研究与应用进展[J]. 国防科技大学学报, 2015, 37(3): 128-135.Zhang Jing-yuan, Shen Jian, Li Heng, et al. Research and Application Progress on Underwater Terrain-aided Navigation Technology[J]. Journal of National University of Defense Technology, 2015, 37(3): 128-135.
[5] Ramesh R, Jyothi V B N, Vedachalam N, et al. Development and Performance Validation of a Navigation System for an Underwater Vehicle[J]. Journal of Navigation, 2016, 69: 1097-1113.
[6] 邹炜, 孙玉臣. 水下地形匹配辅助导航技术研究[J]. 舰船电子工程, 2017, 37(8): 5-10.Zou Wei, Sun Yu-chen. Summary of Underwater Terrain Matching Aided Navigation Technology[J]. Ship Electronic Engineering, 2017, 37(8): 5-10.
[7] 高永琪, 刘洪, 张毅. 测量误差对水下地形匹配性能的影响研究[J]. 弹箭与制导学报, 2014, 34(1):180-183.Gao Yong-qi, Liu Hong, Zhang Yi. The Study on Measurement Errors about Underwater Terrain Matching Performance[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2014, 34(1): 180-183.
[8] Allotta B, Caiti A, Costanzi R, et al. A New AUV Navigation System Exploiting Unscented Kalman Filter[J]. Ocean Engineering, 2016, 113: 121-132.
[9] Wang K, Zhu T, Qin Y, et al. Matching Error of the Iterative Closest Contour Point Algorithm for Terrain-aided Navigation[J]. Aerospace Science & Technology, 2018, 73: 210-222.
[10] 王汝鹏, 李晔, 马腾, 等. AUV地形匹配导航快速收敛滤波[J]. 华中科技大学学报(自然科学版), 2018, 46(7): 99-102.Wang Ru-peng, Li Ye, Ma Teng, et al. Terrain Reference Navigation Fast Convergence Filtering of AUV[J]. Journal of Huazhong University of Science and Technology(Nature Science Edition), 2018, 46(7) : 99-102.
[11] Bishop G C. Gravitational Field Maps and Navigational Errors[J]. IEEE Journal of Oceanic Engineering, 2002, 27(3): 726-737.
[12] 谌剑, 张静远, 查峰. 变分辨率质点滤波水下地形匹配算法[J]. 中国惯性技术学报, 2012, 20(6): 694-699.Shen Jian, Zhang Jing-yuan, Zha Feng. Alterable Resolution Point-mass Filter Algorithm for Underwater Terrain Matching Method[J]. Journal of Chinese Inertial Technology, 2012, 20(6): 694-699.
[13] 张亚南, 朱长青, 杜福光. 一种基于信息盒维数的DEM适宜分辨率确定方法[J]. 地理与地理信息科学, 2014, 30(6): 17-20.Zhang Ya-nan, Zhu Chang-qing, Du Fu-guang. Optimizing DEM Resolution with Information Box Dimension[J]. Geography and Geo-Information Science, 2014, 30(6): 17-20.
[14] 朱伟, 王东华, 周晓光. 基于信息熵的DEM最佳分辨率确定方法研究[J]. GIS技术, 2008(5): 79-82. Zhu Wei, Wang Dong-hua, Zhou Xiao-guang. The Research of Optimizing DEM Resolution Based on Information Entropy[J]. Remote Sensing Information, 2008(5): 79-82.
[15] 王英钧. 地形辅助导航综述[J]. 航空电子技术, 1998(1): 24-29.
[16] 吕文涛, 王宏伦, 刘畅, 等. 无人机地形匹配辅助导航系统设计与仿真[J]. 电光与控制, 2014, 21(5): 63-68.Lü Wen-tao, Wang Hong-lun, Liu Chang, et al. Design and Simulation of Terrain Matching Aided Navigation System for UAVs[J]. Electronics Optics & Control, 2014, 21(5): 63-68.
[17] 蒋秉川, 万刚, 李锋, 等. 机器人超高分辨率立体网格导航地图建模研究[J]. 系统仿真学报, 2017, 29(11): 112-119.Jiang Bing-chuan, Wan Gang, Li Feng, et al. Robotic Navigation Map Construction with Ultra-High Resolution Volumetric Grid[J]. Journal of System Simulation, 2017, 29(11): 112-119.
[18] Liu F, Balazadegan Y, Gao Y. Tight Integration of INS/Stereo VO/Digital Map for Land Vehicle Navigation[J]. Photogrammetric Engineering & Remote Sensing, 2018, 84(1): 15-23.
[19] Zhang T, Xu X, Xu S. Method of Establishing an Underwater Digital Elevation Terrain Based on Kriging Interpolation[J]. Measurement, 2015, 63: 287-298.
[20] Karakasis E, Papakostas G, Koulouriotis D, et al. A Unified Methodology for Computing Accurate Quaternion Color Moments and Moment Invariant[J]. IEEE Transactions on Image Processing, 2014, 23(2): 596-611.
[21] Fan L, Smethurst J A, Atkinson P M, et al. Propagation of Vertical and Horizontal Source Data Errors into a TIN with Linear Interpolaton[J]. International Journal of Geographical Information Science, 2014, 28(7): 1378-1400.
[22] 宁永成, 侯代文. 递推的贝叶斯估计方法[J]. 兵器装备工程学报, 2013, 34(10): 130-136.Ning Yong-cheng, Hou Dai-wen. A Survey of Recursive Bayesian Estimation Methods[J]. Sichuan Ordnance Journal, 2013, 34(10): 130-136.
[23] 张堃薇, 王可东, 唐文庆. 基于非线性贝叶斯的概率地形匹配算法[C]//中国惯性技术学会高端前沿专题学术会议—钱学森讲坛: 天空海一体化水下组合导航. 北京:钱学森空间技术实验室, 2017.
[24] 陈立娟, 杜建丽, 陈俊宇. 基于有限单元的贝叶斯滤波估计算法[J]. 系统工程与电子技术, 2017, 39(10): 2305- 2311.Chen Li-juan, Du Jian-li Chen Jun-yu. Bayesian Filtering Estimation Approach Based on Finite Element Method[J]. Systems Engineering and Electronics, 2017, 39(10): 2305-2311.
[25] Yoo Y M, Chan G P. Improvement of Terrain Referenced Navigation Using a Point Mass Filter with Grid Adaptation[J]. International Journal of Control Automation & Systems, 2015, 13(5): 1173-1181.
[26] 刘洪, 高永琪, 张毅. 基于质点滤波的水下地形匹配算法分析[J]. 弹箭与制导学报, 2013, 33(3): 12-16.Liu Hong, Gao Yong-qi, Zhang Yi. The Analysis on Underwater Terrain Matching Algorithm Based on Point-mass Filter[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2013, 33(3): 12-16.
[27] Han Y, Wang B, Deng Z, et al. A Mismatch Diagnostic Method for TERCOM-based Underwater Gravity Aided Navigation[J]. IEEE Sens. J., 2017, 17(9): 2880-2888.
[28] 谌剑, 张静远, 李恒.基于灰色决策的地形辅助导航区域选取方法[J]. 海军工程大学学报, 2012, 24(5): 48-53.Shen Jian, Zhang Jing-yuan, Li Heng. Selection Criteria for Matching Area of Terrain Aided Navigation Based on Gray Decision-making[J]. Journal of Naval University of Engineering, 2012, 24(5): 48-53.
Selection of Digital Map Resolution for Underwater Terrain Aided Navigation
XU Zhen-yang1,2, WANG Peng1, ZHANG Jing-yuan1
(1. College of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China; 2. 91991thUnit, The People’s Liberation Army of China, Zhoushan 316000, China)
Aiming at the problem that the selected digital map resolution for navigation is not clear, which restricts navigation performance, an underwater digital elevation model of underwater terrain was built based on the real water depth data of the certain sea area. According to the idea of error transfer, the recursive Bayesian theory and the point mass filter theory, appropriate digital map resolution for terrain aided navigation was given via analysis and simulation for the two typical areas with small fluctuation and large fluctuation. Then, based on the terrain contour matching(TERCOM) algorithm, the polynomial regression analysis of the quantitative relationship between digital map resolution and matching error was carried out for different terrain to further determine the appropriate map resolution. The results show that the analysis results are approximately equivalent to the simulation results, which proves the reliability of the research results. The appropriate resolution ranges for small and large fluctuation areas are around 13 m and 25 m, respectively. Diverse characteristic terrains need different appropriate resolution, and large fluctuation area requires lower digital map resolution compared with small fluctuation area. The relationship between the digital map resolution of different terrain and the matching error appropriately obeys the change law of polynomial curve. This research may provide reference for making of digital map, resolution selection, and underwater measurement in underwater terrain aided navigation.
underwater terrain aided navigation; digital map resolution; point mass filter; terrain contour matching(TERCOM) algorithm; matching error
U666.1; P289
A
2096-3920(2020)04-0410-10
10.11993/j.issn.2096-3920.2020.04.009
2019-08-23;
2019-12-03.
水中兵器十三五预研项目(3020605010201).
徐振烊(1994-), 男, 在读硕士, 研究方向为武器系统运用与保障工程.
徐振烊, 王鹏, 张静远. 水下地形辅助导航适宜地图分辨率的选取[J]. 水下无人系统学报, 2020, 28(4): 410-419.
(责任编辑: 许 妍)
