基于模式互信息的大气湍流畸变波前重构
2020-07-01徐晨露郝士琦赵青松刘玉洁
徐晨露, 郝士琦, 王 勇, 赵青松, 刘玉洁
(1.国防科技大学脉冲功率激光技术国家重点实验室,合肥,230037; 2.32032部队,北京,100193;3.94654部队,南京,210046)
自由空间光通信由于其通信容量大、保密性好等优点已经得到越来越广泛的应用。然而激光光束在大气信道中传播,会不可避免地受到大气湍流的影响,导致接收到的光束产生波前畸变、光强闪烁[1-3]等现象,影响通信质量。为了克服大气湍流带来的问题,提高通信质量,通常在接收端通过自适应光学系统对接收到的激光光束进行校正[4-5],自适应光学系统通过对接收到的光束进行波前探测,重构出激光光束的波前相位信息,然后通过变形镜对其进行校正。波前重构的算法主要有直接斜率法和模式法。直接斜率法[6-8]直接通过波前探测器探测到的斜率进行重构,将波前传感器的测量量与变形镜的响应特性建立起对应关系,通过算法直接计算出控制电压信号。利用模式法[9-11]进行波前重构时,需将波前相位畸变展开成不同的正交多项式组合,不同的正交基分别代表由大气湍流引起的波前相位畸变的不同模式,比如倾斜、平移、离焦、像散、球差和彗差等,每一项都有相对应的物理意义。因此模式法可以为分析不同的模式畸变提供一定的参考,故本文利用模式法来对大气湍流引起的激光光束波前相位畸变进行重构。
由于大气湍流是不稳定的,随机变化的,且变化速度较快,因此波前重构的实时性要求很高,需要在达到精度要求的基础上,尽可能地提高波前重构的速度[12-14]。波前重构的速度和精度主要取决于用于重构的模式数量,模式数越多,重构的波前越准确,但模式数的增加同时也会导致重构速度降低。在大气湍流影响下,激光光束的倾斜、平移、像散、球差、彗差等因素共同造成了接收端的波前相位畸变,因此各个模式都对波前畸变有贡献,但不同模式的影响程度不同。因此,本文通过计算大气湍流引起的波前畸变与各个模式的互信息,分析不同模式对波前畸变的影响程度,选择互信息大的模式用于重构,从而可以在不影响重构精度的条件下降低重构的模式数,提高波前重构效率。
1 基本模型与原理
1.1 自适应光学系统模型
典型的自适应光学系统(Adaptive Optics, AO)[15]主要由波前探测器、波前控制器和波前校正器构成,见图1。其中,波前探测器实时测量接收光的波前畸变;波前控制器将波前探测器测量得到的波前畸变转化为波前校正器的控制电压信号;波前校正器则根据波前控制器提供的控制电压重构波前,以校正接收光的波前畸变。通过以上3个基本组成器件的协同工作,形成了AO系统的控制环路。
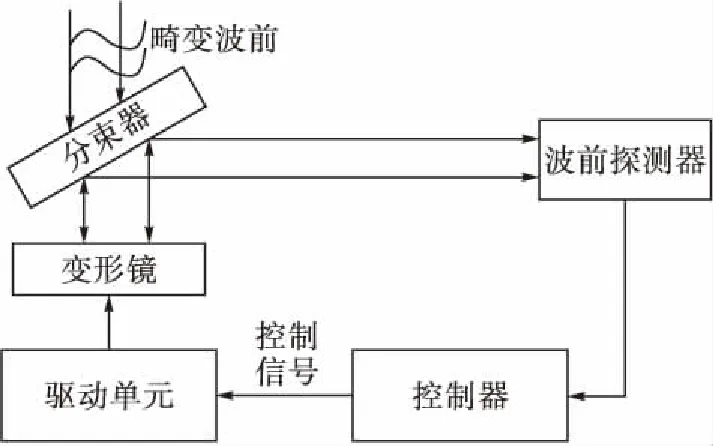
图1 典型的自适应光学系统结构示意图
1.2 波前探测器原理
波前探测器是AO系统的重要组成部分,其对波前畸变的实时监测是在接收端实施准确波前校正的前提。目前在波前传感器的选择上主要采用夏克·哈特曼波前探测器(Shack Hartmann wavefront Sensor, SH WFS),该类波前探测器在实际应用中相比其他波前探测器具有光能利用率高、结构简单且可同时测量2个方向波前斜率的优势。一个典型的SH WFS主要由微透镜阵列、CCD传感器和数据处理系统组成,其处理过程见图2。
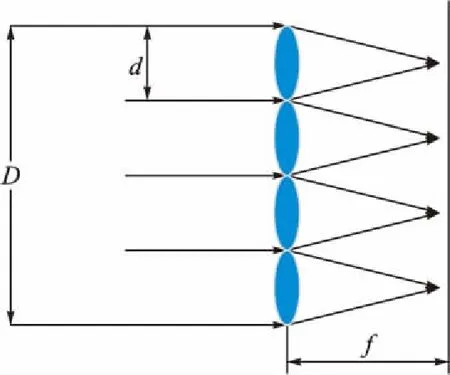
图2 SH WFS工作原理示意图
SH WFS的核心部件为微透镜阵列,其中的每个子透镜可作为子孔径将接收光束聚焦成一个光斑阵列。随后,通过在聚焦平面上放置高灵敏度的光电探测器对聚焦光斑进行探测,可得到每个子孔径光斑的中心坐标。在此基础上,结合各子孔径区域的坐标中心,可得到第i个子孔径对应的相对偏移坐标为(Xi,Yi),其与相对波前斜率之间的关系可表示为:
(1)
式中:(gXi,gYi)为第i个子孔径的波前斜率;S为子孔径面积;Ai为第i个子孔径区域;λ为入射光波长;f为阵列透镜到波前探测器内位敏探测器的距离。得到子孔径的斜率之后,再通过相应的波前重构算法就可以得到波前相位畸变,进而实现波前校正。
本文采用有效子孔径为48的SH WFS,其子孔径分布[9]见图3,图中“+”表示子孔径的定标点。
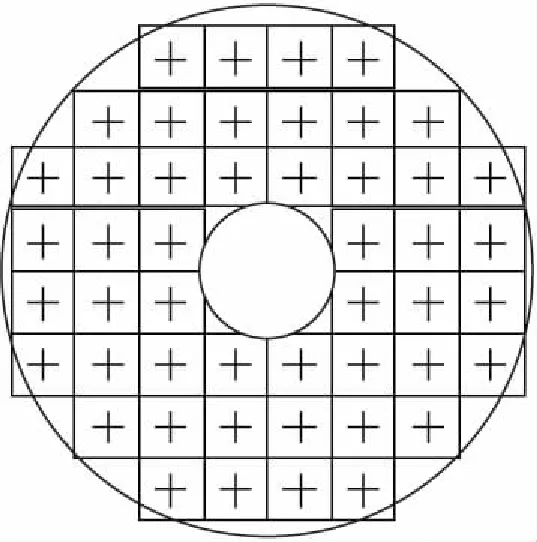
图3 48单元的SH WFS的子孔径分布
2 波前重构
2.1 模式法波前重构原理
一个完整的波前相位函数可展开成正交的Zernike多项式组合形式如下:
(2)
式中:l表示为模式数;ak为第k阶Zernike多项式系数;Zk(x,y)为第k阶Zernike多项式,其极坐标表达式为:
(3)
式中:
(4)
根据第1.2节中介绍的SH WFS测量原理,其所测量得到的波前斜率与Zernike多项式组合之间有如下关系成立:
(5)
根据探测器测量得到的各子孔径内的波前斜率数值,求解各模式对应的多项式系数,进而求得完整的波前相位展开式,即可重构出波前畸变。假设传感器中子孔径的数目为m,基于模式法重构波前相位时选取的Zernike多项式组合最高阶数为N,则其构造过程为:
(6)
式中:
(7)
(8)
将式(6)写成矩阵形式为:
G=ZA
(9)
式中:G表示由传感器测量得到的波前斜率信息,其中既包括x方向的斜率信息,也包括y方向的斜率信息;Z为规格为2m×N的重构矩阵,其大小由传感器中微透镜阵列中子透镜的规格决定;A为N阶Zernike多项式系数向量。由此,波前重构的关键在于对系数向量A的求解,对此,通常采用奇异值分解法进行计算,在得到Z的广义逆矩阵Z+之后,通过式(10)即可计算出系数矩阵A:
A=Z+G
(10)
将计算得到的Zernike多项式系数代入式(2)中,即可对大气信道中的波前畸变进行重构。利用模式法进行波前重构时,其重构的精确性将直接取决于所采用的Zernike多项式阶数,阶数越高,所重构的相位更为精确。然而较高的Zernike多项式阶数又将使得在求解系数矩阵时的方程组维度增高,进而使得运算量急剧增加。
2.2 基于互信息的波前重构
互信息[16-17](Mutual Information, MI)可以用来描述2个随机变量的关系,将它看做是一个随机变量中包含的关于另一个随机变量的信息量,2个变量之间的互信息可以描述为:
I(X;Y)=H(X)+H(Y)-H(X,Y)
(11)
式中:H(X)、H(Y)分别是变量X、Y的熵,H(X,Y)是变量X、Y的联合熵,分布可以表示为:
(12)
(13)
(14)
式中:p(x)、p(y)是X和Y的概率密度函数;p(x,y)是联合概率密度函数。
由此,基于模式的互信息重新构建了重构矩阵,按照2.1节的方法求出系数矩阵,带入式(2)中,即可得到重构的波前相位。
3 数值模拟
本文利用Zernike多项式法[20]来产生相位屏模拟大气湍流引起的波前相位畸变,在大气湍流相干长度为0.2 m,采样点为255×255的条件下,利用65阶Zernike多项式模拟产生500个相位屏,分别计算不同模式与不同相位屏的互信息,不同模式与波前相位畸变的互信息统计平均结果如图4所示。从图中可以看出,第1个模式与大气湍流引起的波前相位畸变基本没有互信息,第3个模式的互信息最大,较高阶的模式互信息大小与阶数没有一个明确的关系,并不是阶数越大,互信息越小。
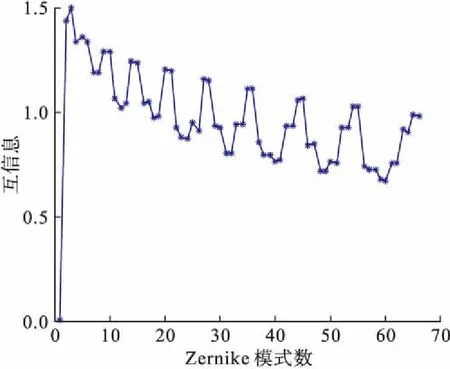
图4 不同模式与波前相位畸变的互信息
因此利用模式法进行波前重构时,在相同的模式数N下,与传统的模式法利用前N阶Zernike多项式进行重构相比,若用于波前重构的Zernike多项式正交基是互信息较大的N个模式,则重构的波前会包含更多的实际波前畸变的信息。
根据图4,本文将Zernike多项式的不同模式按互信息从大到小重新排列,对比了不同模式数下传统模式法和基于互信息的模式法的重构效果,利用均方根误差来描述波前残差的大小,其表达式为:
(17)
式中:φn(x,y)表示采用n个模式进行重构产生的波前;I、J分别是x、y方向上的采样点数;M表示多项式所包含圆域内的总采样点数。
利用Zernike多项式法产生的相位屏如图5所示,分别利用传统模式法和基于互信息的模式法对其进行重构,产生的波前残差如图6所示。重构出的波前和波前残差如图7所示。
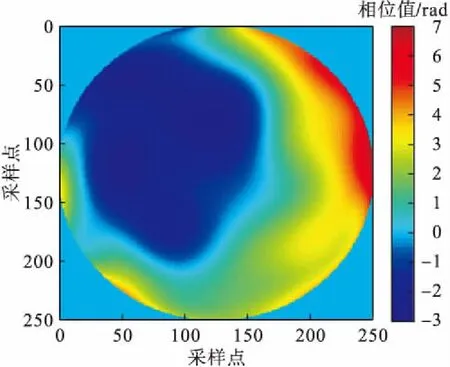
图5 大气湍流引起的波前相位畸变
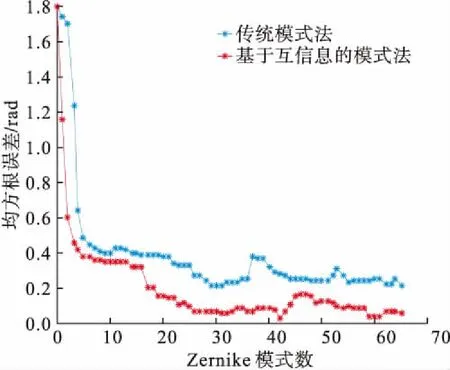
图6 传统的模式法和基于互信息的模式法在不同模式数下的重构误差
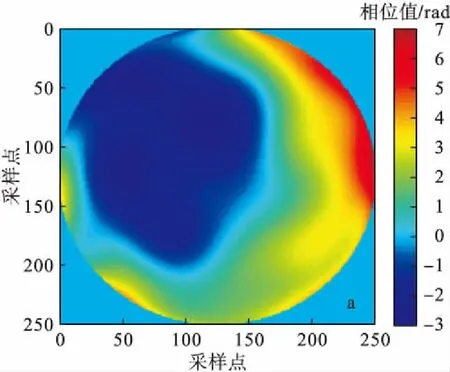
(a)重构波前
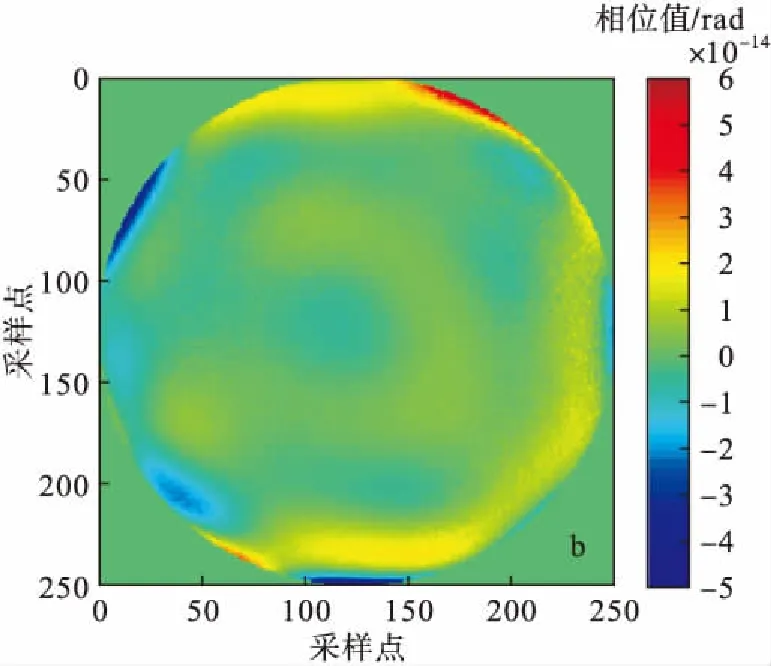
(b)重构波前与实际波前的波前残差图7 基于模式互信息的波前重构结果
图6展示了传统的模式法和基于互信息的模式法在不同模式数下的重构误差,从图中可以看出,随着模式数的增加,波前残差的均方根逐渐减小。相比较传统的模式法,采用基于互信息大小重新排列后的正交基进行波前重构的速度和效果都有明显的提升。当仅采用一种模式进行校正时,基于互信息重构的波前残差均方根从1.8 rad下降到1.15 rad,而传统模式重构法的波前残差均方根仅下降到1.74 rad,采用2种模式重构波前时,2种方法的波前残差均方根分别下降了1.2 rad和0.1 rad。当采用65个模式对波前重构时,传统模式法的波前残差为0.2 rad,而当基于互信息重构的波前残差为0.2 rad时,仅需要采用18个模式,所需的模式数大大减少,降低了重构矩阵的复杂度,提升的波前重构的速度。
从图7可以看出,重构出的波前与大气湍流引起的波前较为相似,波前残差较小。
4 结语
在利用模式法对大气湍流引起的激光光束波前相位畸变进行重构时,不同的模式都代表着不同的相位畸变因素,如倾斜、平移、像散、球差、彗差等。这些因素共同造成了接收端的波前相位畸变,各个模式都对波前畸变有贡献。利用信息论里的互信息概念,分别计算不同模式与波前畸变的互信息,得出第1个模式与大气湍流引起的波前相位畸变基本没有互信息,第3个模式的互信息最大,阶数较高的模式数互信息大小与阶数没有一个明确的关系,并不是阶数越大,互信息越小。
与传统的模式法按Zernike的阶数从小到大计算重构矩阵相比,将不同的模式按互信息从大到小重新排列后计算重构矩阵的波前重构方法能够明显的提高波前重构的精度和速度。当采用65个模式对波前重构时,传统模式法的波前残差为0.2 rad,而当基于互信息重构的波前残差为0.2 rad时,仅需要采用18个模式,所需的模式数大大减少,降低了重构矩阵的复杂度,提升的波前重构的速度。
