纳秒脉冲气动激励无人机流动控制风洞试验
2020-07-01贺启坤杨鹤森谢理科
梁 华, 贺启坤, 魏 彪, 杨鹤森, 苏 志, 谢理科
(空军工程大学航空工程学院等离子体动力学重点实验室, 西安, 710038)
增升减阻是飞行器永恒的追求[1]。当前主动流动控制技术被认为可以扩展飞行器的飞行包线,提升飞行器气动性能,并增大设计容限[2-4]。等离子体流动控制作为一种新型的主动流动控制技术,具有重量轻、尺寸小,结构简单,作用频带宽,能耗相对较低等优势[5],并得到了实验的验证[6]。
表面介质阻挡放电是等离子体流动控制中使用最广泛的等离子体气动激励方法[7]。图1是典型等离子体激励器示意图,等离子体激励器包含金属电极和绝缘介质层,裸露电极直接暴露在大气中,底层电极被绝缘介质层隔离起来。根据文献[8]可知,诱导气流最大速度约为8 m/s。
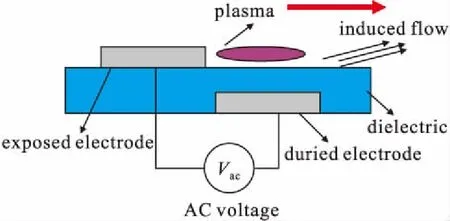
图1 典型的等离子体激励器示意图
近些年来,等离子体流动控制被应用于许多领域,例如翼型的流动分离控制[9-12],层流和紊流的转戾控制[13],涡轮叶片的流动分离抑制[14],翼型的升力提升和附面层加速[15-16]。
早期工作以毫秒表面介质阻挡放电为主。在2005年,Opaits等[17]人首次利用纳秒放电进行等离子体流动控制,揭示了来流速度为20~75 m/s时纳秒放电的流动分离控制作用,并提出了相应数值模型。纳秒脉冲激励的放电能量集中在几纳秒至几十纳秒内释放,产生温度升和压力升,并形成半圆形压缩波。这种瞬间释热效应会以横向动量的形式向附面层低能流注入能量,促进低能附面层与高能主流区掺混,增强了附面层抵抗逆压梯度的能力,使得气流在一个非常广泛的速度(Ma=0.03~0.75)和雷诺数范围内都能得到有效控制。同时纳秒滑动放电驱动的三电极结构激励器的工作也得到开展,这种新型的三电极结构激励器被认为能够显著提升等离子体流动控制能力[18-20]。此外,纳秒放电在其他领域内的作用效果已经得到验证,诸如压气机内流的流动分离控制、轴流式压气机的失速边界扩展、斜激波控制和二维翼型的流动分离控制[21-24]。
纳秒脉冲等离子体流动控制研究已经取得巨大进展,但之前的工作主要集中在二维翼型的流动分离控制上,且来流速度低于30 m/s;同时,其中纳秒脉冲等离子体流动控制的机制仍不清楚。本文通过实验研究了纳秒脉冲气动激励对一种三维飞翼布局无人机模型的流动分离控制效果。首先,研究了纳秒脉冲介质阻挡放电的电特性和诱导流场特性;在此基础上,通过风洞试验,对纳秒脉冲介质阻挡放电控制飞翼构型无人机流动分离的效果以及脉冲频率、激励电压等激励参数对流动控制的影响规律进行了研究。
1 实验装置
1.1 无人机测试模型和等离子体激励器
本文所用的测试模型是一个后掠角为47°的飞翼布局无人机模型。图2是用于风洞试验的无人机模型的示意图,该无人机模型的尺寸是原尺寸的3.67%,其翼根弦长为0.36 m,宽0.6 m。
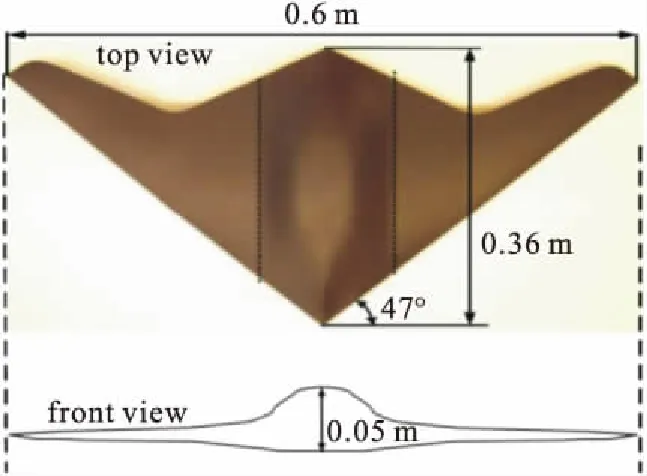
图2 风洞实验所使用的无人机模型示意图
所用的等离子体激励器包含2个厚度为0.018 mm的铜箔电极,电极间由3层厚度为0.065 mm的Kapton胶带隔开。裸露电极宽度为3 mm,底层电极宽度为5 mm,两电极长度均为0.4 m。电极非对称布置,并沿弦向布置。图3是等离子体激励器位置简图,激励器位于模型的两侧。

图3 无人机等离子体激励器布置示意图
风洞试验中采用了2种不同的电源。第1种是输出电压为0~30 kV,能够产生高振幅正弦波的毫秒放电电源,研究过程中将频率固定在22 kHz,激励频率1~10 kHz可调,占空比1%~99%可调[25]。另一种是输出电压为0~80 kV,激励频率1~5 kHz可调的纳秒放电电源,其电压波形的上升时间10~30 ns,半周期为50~300 ns。
1.2 风洞
实验采用中国航空工业总公司空气动力研究所的亚音速回流风洞,该风洞的环形测试区直径为1.5 m,长1.95 m,流速为0~53 m/s,在流速大于53 m/s时的紊流度小于0.5%,测试区流速测量精度为0.01 m/s,测试模型的迎角-5~35°可调。
用于测试的无人机模型通过一个六维力平衡的支杆固定在风洞上,支杆利用六维测力天平可以得到无人机模型的升力系数、阻力系数和力矩系数。图4显示的是无人机模型在风洞测试区的固定情况。
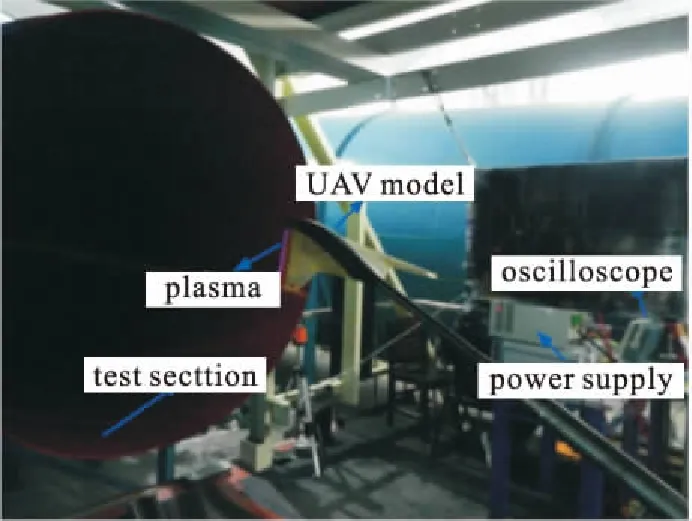
图4 无人机模型固定在风洞的测试系统
1.3 测试系统
激励电压和放电电流分别通过电压探针(Tektronix P6015A)和电流探针测量(Tektronix TCP312+TCPA300),利用示波器(Tektronix DP04104)记录下电压、电流信号。
等离子体气动激励产生的诱导速度和涡度通过离子图像测速仪(Lavision)测量,利用一个高重复双脉冲Nd:YAG激光器(135 Mj/pulse)作为光源,激光脉冲的时间间隔是120 ns,激光的重复频率是5 kHz,相机的分辨率是1 600 pix×1 200 pix,空气中散布着矿物油气化形成的大小约为30 μm的微粒。
通过高速纹影技术测量由纳秒放电产生的冲击波。纹影系统包含光源、凹透镜和电荷耦合摄像机,其中高速电荷耦合摄像机以35 714.3 Hz的成帧速率捕获瞬时的冲击波。放电电流的第一个脉冲信号被选作触发信号,触发信号被输入同步控制器DG535,随即高速电荷耦合相机开始记录纳秒放电产生的冲击波的形成和发展。
2 实验结果
2.1 激励参数测试结果
2.1.1 电参数
图5是毫秒脉冲气动激励和纳秒脉冲气动激励的激励电压和放电电流随时间变化的图表。从图5看出:毫秒脉冲激励和纳秒脉冲激励的激励电压变化范围分别为-6~6 kV和0~12 kV,后者可以产生更强的放电现象和更大的放电电流。纳秒脉冲气动激励的放电电流为30 A,远大于毫秒脉冲气动激励的放电电流0.1 A。通过对放电电流和激励电压进行积分可以得到电源消耗的功率,毫秒脉冲气动激励每次脉冲注入的能量为7.4 mJ,纳秒脉冲气动激励每次脉冲注入的能量为12.8 mJ。纳秒脉冲气动激励最大的瞬时功率为0.3 MW,毫秒脉冲气动激励最大的瞬时功率仅为600 W,这个功率在某种程度上可以反映放电的强烈程度,即纳秒脉冲气动激励的瞬时激励强度要大于毫秒脉冲气动激励。
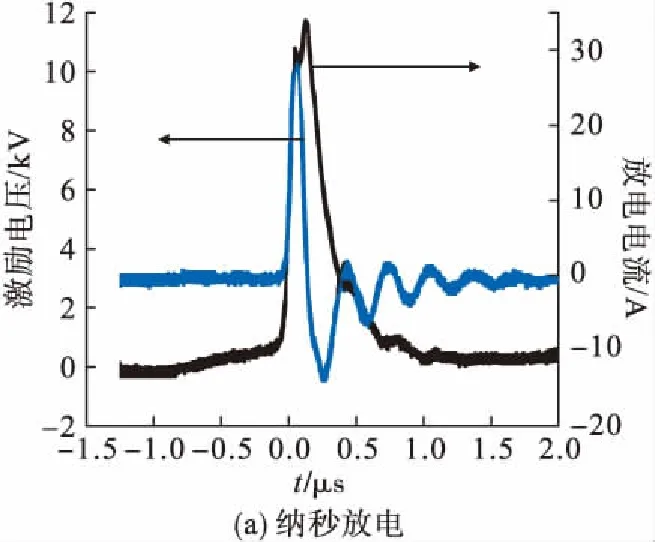
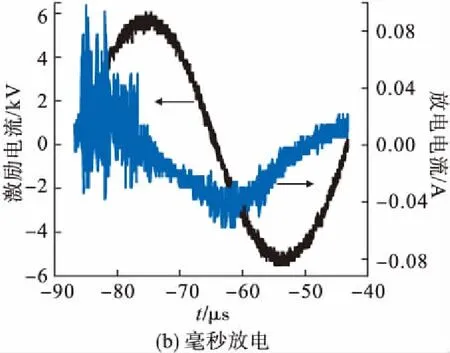
图5 放电电压和放电电流随时间的曲线图
2.1.2 纳秒脉冲气动激励的PIV测试结果
图6显示的是纳秒脉冲气动激励产生的诱导气流的测试结果,其激励电压为13 kV,脉冲频率为230 Hz。激励器被布置在x=35 mm处,x为横轴坐标。
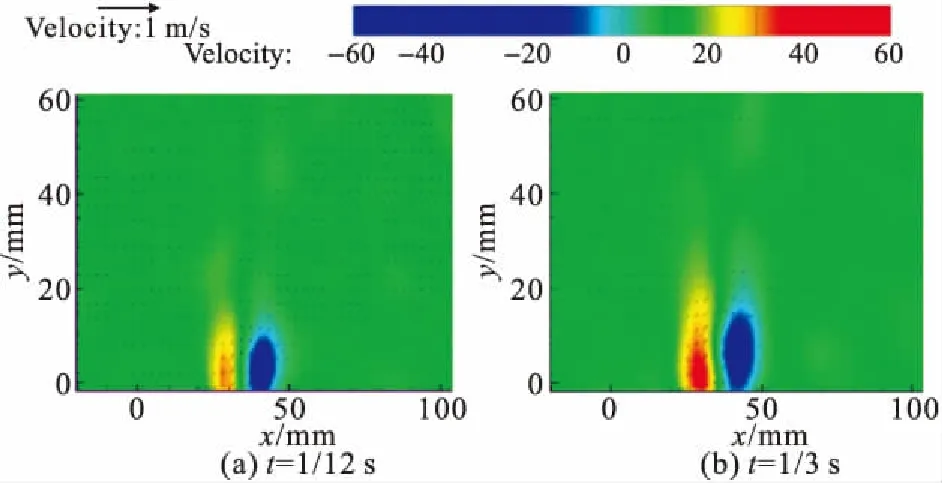
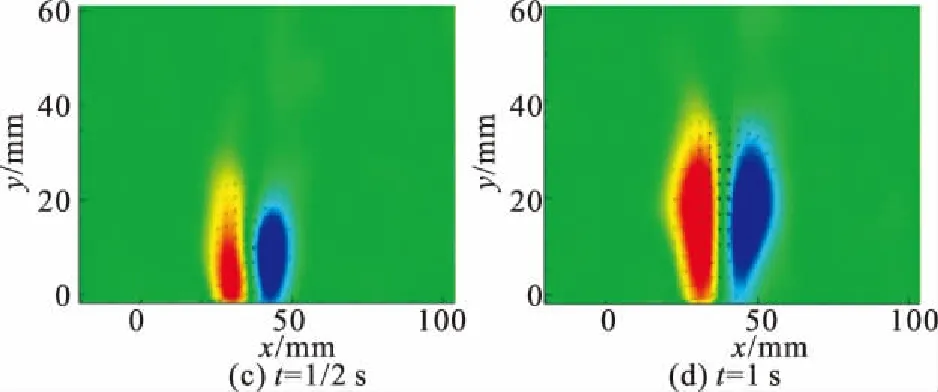

图6 不同时间NDPAA诱导的速度和涡量PIV试验结果
从图6看出,首先,纳秒脉冲气动激励产生的最大诱导速度不超过0.5 m/s,远小于毫秒激励;其次,纳秒脉冲气动激励产生的诱导气流发展缓慢,其形成稳定壁面射流用了10 s;纳秒脉冲气动激励产生的诱导气流类似于向上的冲击波,而不像毫秒激励产生的诱导气流是以启动涡或壁面射流的形式出现;最后,纳秒放电产生的诱导气流方向近似于垂直绝缘介质层,而毫秒激励产生的诱导气流方向平行于绝缘介质层。
2.1.3 纳秒放电诱导产生的冲击波参数
图7是不同时间尺度下该冲击波传播过程的纹影测试结果,等离子体激励器被布置在图片的底部,蓝色虚线表示纳秒脉冲激励诱导产生的冲击波前沿。
纹影测试结果表明纳秒放电在静止空气中诱导产生冲击波。放电时间10~28 μs,冲击波向外传播6.9 mm,通过间隔和传播距离计算出冲击波的传播速度约为380 m/s(Ma=1.2),略大于音速。随着冲击波向外传播,其轮廓变得难以辨认,冲击波的强度减弱,在每个脉冲放电周期内冲击波可以持续观察的时间约为80 μs。在诸如500 μs、1 350 μs和2 700 μs等大于80 μs的放电时间上,冲击波减弱为弱扰动。


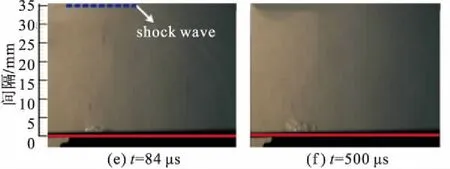

图7 不同时间NDPAA诱导的冲击波纹影试验结果
2.2 风洞测试结果
本文中进口自由流的速度设置为20~75 m/s,自由流速度记为V∞,迎角记为α,脉冲频率记为f,激励电压记为U。
2.2.1 不同迎角的实验结果
图8显示的是V∞=30 m/s下无人机模型在不同迎角的升、阻力系数测试结果,纳秒放电的激励电压设置为11 kV,脉冲频率为200 Hz。
我们可以从风洞试验结果中看出:在迎角小于10°时,无人机模型上表面的气流始终附着在模型表面,此时施加纳秒放电的影响可以忽略不计;在迎角超过10°时,气流由于逆压梯度的作用,在无人机模型飞翼布局的翼尖部分最先开始分离,随着迎角的增大,流动分离从模型的翼尖部分向翼根扩展;在迎角超过临界失速迎角20°时,模型的升力系数减小;在施加激励后,纳秒激励能够有效抑制流动分离,相比于无激励状态,升力系数得到显著增大。计算不同迎角下模型升力系数的增大量,迎角为20°时模型的升力系数增大了2.24%;在迎角超过20°时,纳秒脉冲气动激励仍能有效抑制流动分离;在迎角为27°时施加激励使得模型的升力系数提高了23.75%,最大升力系数从0.89增大到0.99,增大了11.24%,模型的临界失速迎角从20°增大到27°。
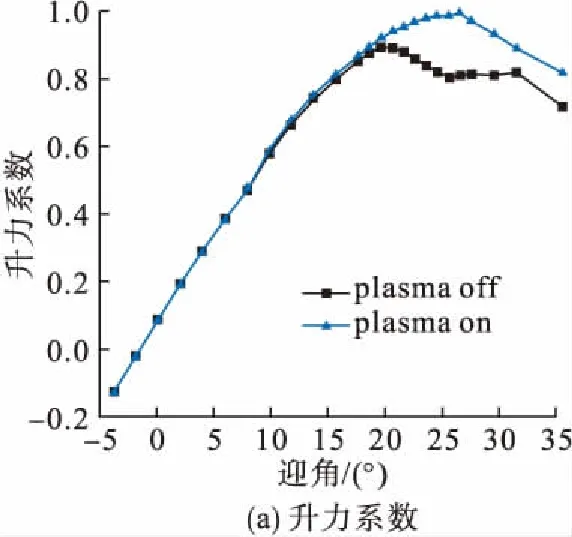

图8 不同迎角下的实验结果
2.2.2 放电频率的影响
本文研究了脉冲频率的影响,图9显示的是在激励电压设置为12 kV,V∞=50 m/s时,脉冲频率变化范围为58~920 Hz下的风洞试验结果。
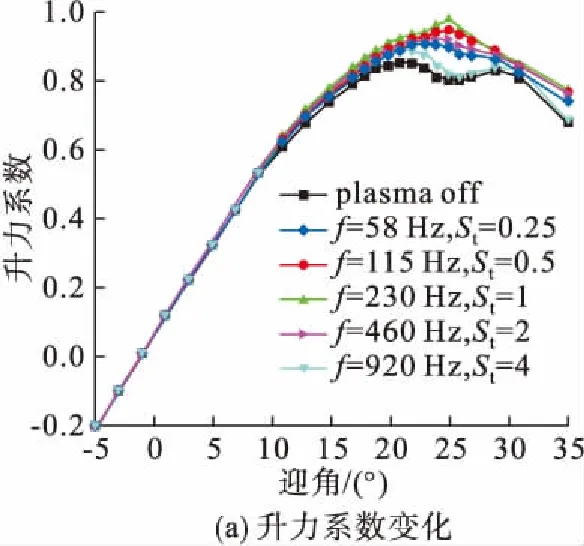
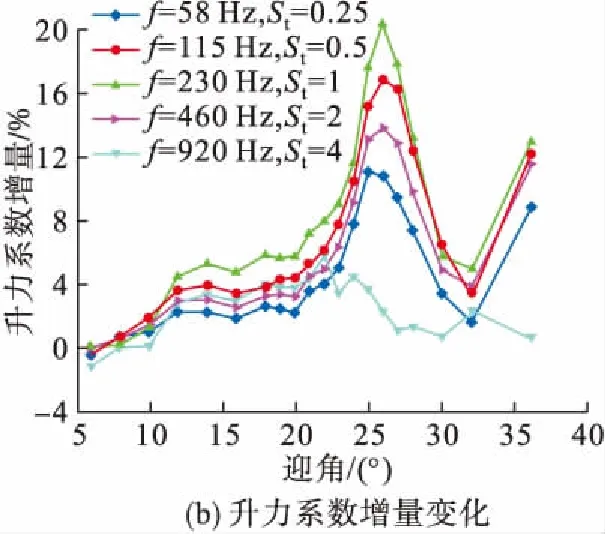
图9 不同脉冲频率下的测量结果
当脉冲频率为920 Hz时,模型升力系数的变化很小,在迎角为22°下最大升力系数增大了5.87%;当脉冲频率为460 Hz时,流动控制效果较920 Hz时更好,纳秒脉冲气动激励可以在局部抑制无人机模型的流动分离,在迎角为26°下最大升力系数增大了10.90%;当脉冲频率为230 Hz时,流动控制效果是所有测试频率中最好的,纳秒脉冲气动激励可以有效抑制流动分离,在迎角为26°下最大升力系数增大了20.45%;当脉冲频率为115 Hz和58 Hz时,流动控制效果较230 Hz时更差,在迎角为26°下最大升力系数分别增大了16.94%和13.92%。总而言之,等离子体流动控制存在一个最优频率,这个最优频率取决于施特劳哈尔数(St),St为1时的流动控制效果最好。St的定义式为St=fc/V∞,其中c是分离区长度,其值与这个无人机模型的平均气动弦长相等(0.22 m),St与fc具有换算关系。最优脉冲频率为230 Hz,其相应的St为1,这与风洞试验结果相吻合。
2.2.3 纳秒激励和毫秒激励的流动控制效果比较
进行风洞试验以对比纳秒脉冲气动激励和毫秒脉冲气动激励的流动控制能力,图10显示的是纳秒脉冲气动激励和毫秒脉冲气动激励在自由流速度为50 m/s,激励电压为12 kV,脉冲频率为230 Hz时,有激励和无激励情况下无人机模型的升力系数。

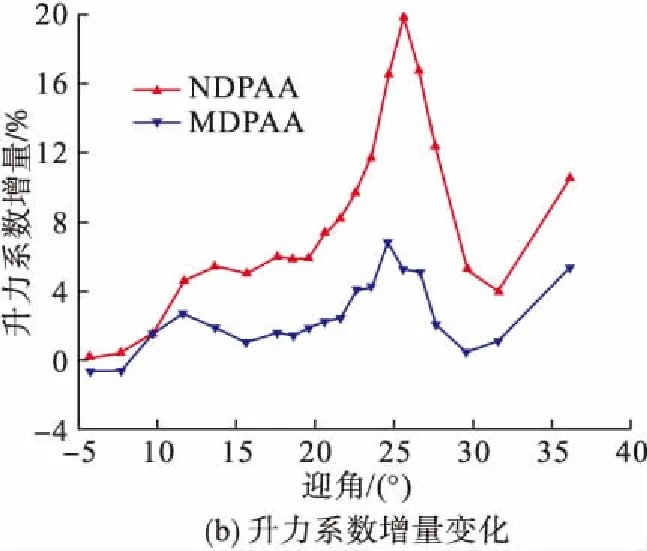
图10 MDPAA和NDPAA升力系数和升力系数增量与迎角比较
从图10可以发现:纳秒脉冲气动激励的流动控制效果比毫秒脉冲气动激励的流动控制效果好得多;毫秒脉冲气动激励只能在局部抑制无人机模型的流动分离,在迎角为25°时,最大升力系数增大了6.86%;纳秒脉冲气动激励能够有效抑制无人机模型的流动分离,在迎角为26°时,最大升力系数增大了20.45%。
2.3 讨论
等离子体流动控制有动力效应、冲击效应和化学效应3种机制。动力效应产生诱导气流;冲击效应在电极附近产生温度升和压力升;化学效应引入离子、电子、激发态粒子等粒子到流场中[26]。以上研究发现,冲击效应和动力效应可能同时为等离子体流动控制起作用。毫秒脉冲气动激励中动力效应是主导机制,其诱导激励器表面附面层加速,注入动力和能量,增强附面层抵抗逆压梯度的能力。但是毫秒脉冲气动激励的最大诱导速度不超过10 m/s,给附面层注入的动力很有限。只有当自由流速度为几十米每秒时,毫秒脉冲气动激励才能有效工作。
从纳秒脉冲气动激励的PIV测试结果中可以看出,其诱导速度小于0.5 m/s,因此纳秒放电等离子体流动控制的主要机制不是动力效应。同时PIV测试结果显示纳秒放电诱导气流的方向并非平行于激励器,而是垂直于激励器;纹影测试结果表明,同时由于放电时间为纳秒级,将放电功率集中在很短的时间内释放,从而在电极附近产生瞬时的强温度升和压力升,加热电极周围的气体,在空气中诱导产生冲击波。综上,推测纳秒脉冲气动激励的主要机制是“冲击效应”,即纳秒放电的这种瞬时加热效应能够将放电功率集中,产生对附面层产生“冲击”式的强扰动,增强附面层与主流的动力和能量掺混,使高速流体注入附面层,从而使气流能够抵抗逆压梯度而不产生流动分离。
3 结论
本文研究了利用纳秒脉冲气动激励进行一型无人机的流动分离控制。基于对激励参数的测试可以发现:毫秒脉冲气动激励和纳秒脉冲气动激励具有大致相同的激励电压,但毫秒脉冲气动激励的最大放电电流仅为0.1 A,而纳秒脉冲气动激励的最大放电电流高达30 A。纳秒脉冲气动激励的最大诱导速度约为0.5 m/s,纳秒脉冲气动激励产生的诱导气流不是像毫秒脉冲气动激励产生的诱导气流以启动涡或壁面射流的形式存在,而是近似于向上的冲击波。纳秒脉冲气动激励产生的快速加热效应在电极附近的空气中形成快速温度升和压力升,进而诱导出一系列冲击波,冲击波的传播速度约为380 m/s,持续时间约为80 μs,在一个放电周期内超过80 μs后,冲击波衰减成弱扰动。基于风洞试验结果可以看出:在进口自由流速度为50 m/s时,纳秒脉冲气动激励能够有效抑制无人机模型的流动分离;在进口自由流速度为30 m/s时对模型施加纳秒脉冲气动激励,可以使模型的临界失速迎角从20°推迟到27°,最大升力系数增大11.24%。当激励电压大于阈值电压时,流动分离能得到抑制。纳秒脉冲气动激励的最优脉冲频率是使施特劳哈尔数为1的频率值。纳秒脉冲气动激励较毫秒脉冲气动激励对附面层流动控制更有效,纳秒脉冲流动控制主要机制时冲击效应,冲击效应较动力效应具有更强的流动控制能力。