基于Rostock运动结构的钻井工具偏置机构研究与设计①
2020-05-18李俊阳
李俊阳
(铜陵职业技术学院机械工程系,安徽 铜陵 244000)
0 引 言
随着国内的油气田开发项目进入中后期阶段,海洋石油钻井也逐渐从浅水钻井走向深水钻井乃至超深水钻井,特殊油气井的数量越来越多,井的结构也越来越复杂。然而,目前国内所使用的大部分钻具属于螺杆钻具[1],在进行定向钻进作业时无法旋转,导致岩屑排除困难,极易发生粘连、卡滞等井下事故,很难满足复杂结构井的钻井需求。
旋转导向钻具能够很好地解决定向钻进作业的旋转问题,而且钻井速度快、效率高,井眼清洁光滑,井身质量也很高[2]。美中不足的是,现有的旋转导向钻具在进行定向钻进作业时,依靠其内部的偏心凸轮挤压芯轴,使芯轴发生强制变形,从而达到定向钻进的造斜效果[3]。这种使芯轴强制变形的偏置机构会持续给芯轴偏置力矩,导致芯轴长时间受交变应力作用极易发生疲劳破坏。为此,芯轴不得不采用强度高而弹性系数低的材料制造,比如高强度钛合金等,制造成本极高[4]。基于Rostock运动结构的偏置机构采用了独特的控制方法,使芯轴无需被强制变形,大大地改善了芯轴的受力情况,降低了芯轴的制造成本并提高了使用寿命[5]。
1 Rostock运动结构设计方案
Rostock运动结构是一种基于笛卡尔坐标系的结构,但与笛卡尔坐标系又略又不同,在熔融堆积成型(FDM)3D打印机领域应用比较广泛。如图1所示,A、B、C、O四个点位于同一平面内,O点为圆心,A、B、C三个点为连杆的固定点,在圆周方向均匀分布,即OA、OB、OC三条虚线的夹角均为120°。D点为目标点位,与三根连杆的另一端固定,假设D点只能在与A、B、C三点构成的平面平行的平面内移动,即D点与A、B、C三点构成的平面的垂直高度H为固定值,则D点的空间位置将由L1、L2、L3三根连杆的长度决定。
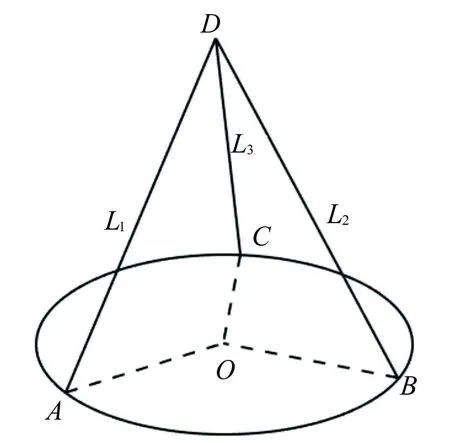
图 1 Rostock运动结构原理
若将D点垂直投影到A、B、C三点构成的平面内,可以得出如图2所示的投影图:
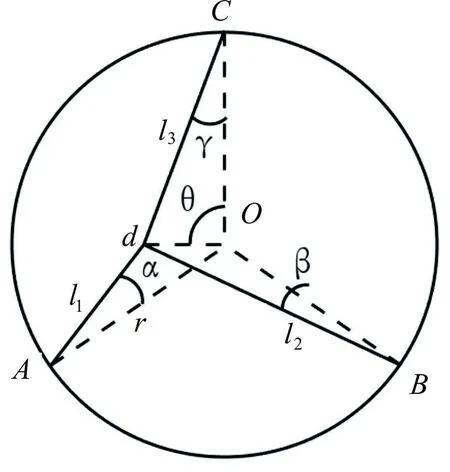
图2 Rostock运动结构投影图
图2中,r为圆的半径,即r=OA=OB=OC,d点即为D点的投影点,l1、l2、l3分别为L1、L2、L3三根连杆的投影长度,根据投影关系可得:
l1·sinα=s·sin(120-θ)
(1)
r=l1·cosα+s·cos(120-θ)
(2)
l2·sinβ=s·sin(θ-60)
(3)
l2=r·cosβ+s·cos(θ-β-60)
(4)
l3·sinγ=s·sin(180-θ)
(5)
l3=r·cosγ+s·sin(θ+γ-90)
(6)
式中,s为d点到O点的距离,即s=Od。根据公式(1)到公式(6),可以计算出s和θ的值,则确定d点的平面位置。而d点和D点的位置关系如图3所示:
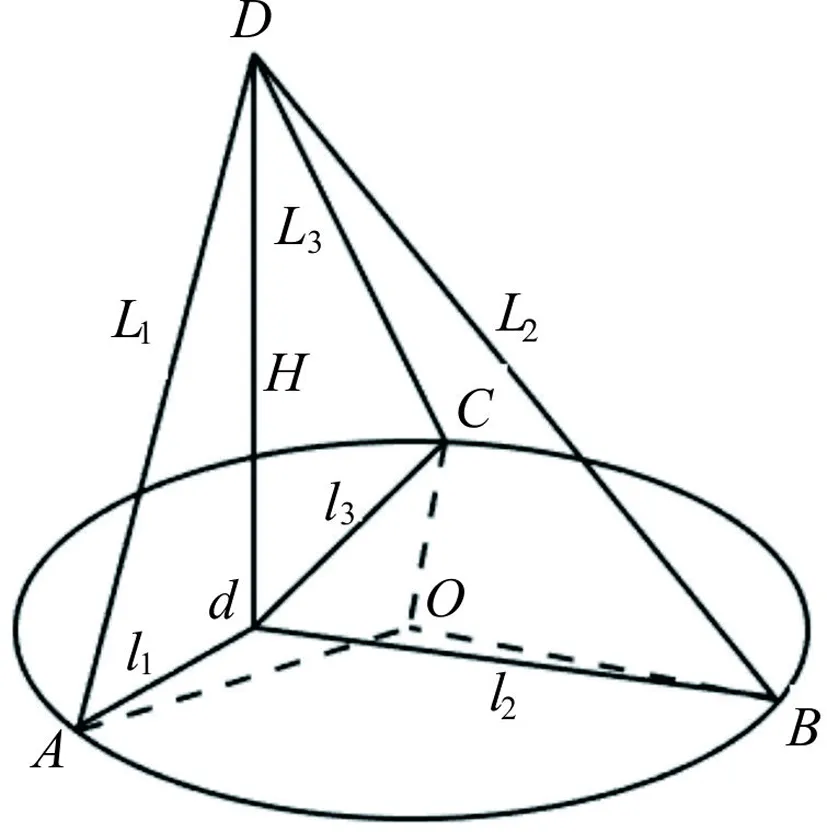
图3 各点的空间位置关系
根据图3可得:
(7)
(8)
(9)
式中,H即为D点与A、B、C三点构成的平面的垂直距离,该距离为固定值。结合公式(1)到公式(9),即可解出D点的空间位置。当L1、L2、L3三根连杆的长度尺寸发生变化时,D点的空间位置会作相应变动。同时,由于D点的高度固定,故只能在平面内进行360°范围内的运动。
2 偏置机构的结构设计
2.1 总体结构设计
钻井工具在进行定向钻进作业时,芯轴轴线与钻具轴线需要始终保持一定夹角,从而保证钻井工具的造斜效果。因此,钻具的偏置机构需要能够提供一定程度的力矩,来维持芯轴的位置稳定。油缸作为常用的执行机构之一,承载能力较强,可以稳定地维持轴瓦安装座的空间位置,使芯轴轴线与钻具轴线始终保持一定夹角。设计的钻井工具偏置机构使用了三支油缸,三支油缸的活塞杆和缸体均采用球头轴承与钻具连接,以保证芯轴轴线与钻具的轴线可以进行360°调整。根据Rostock运动结构的原理,采用液压伺服系统精确控制三支油缸的进油或出油,使三支油缸的活塞杆根据需求伸出或回缩,从而使三支油缸的总长度分别达到L1、L2、L3三根连杆的设定值,确定芯轴的具体位置。偏置机构的总体结构如图4所示:

图4 偏置机构的总体结构
2.2 偏置机构的工作原理
当钻具需要进入定向钻进作业模式时,由控制系统确定定向钻进的造斜率,并计算出芯轴轴线和钻具轴线的夹角以及芯轴的方位,从而确定轴瓦安装座的空间位置。计算机根据轴瓦安装座的空间位置计算出三支油缸的总长度,再由液压伺服系统确定三支油缸的进、出油量。偏置机构的简化示意图如图5所示:

图5 偏置机构简化图
当油缸①的无杆腔进油时,油缸①的活塞杆伸出,油缸① 的总长度增加,轴瓦安装座向下移动;当油缸① 的无杆腔出油时,油缸①的活塞杆回缩,油缸①的总长度减少,轴瓦安装座向上移动;同理,调节油缸②或油缸③的进、出油量,轴瓦安装座均会向对应方向移动;若同时调整三支油缸的进、出油量,则轴瓦安装座可移动至油缸极限尺寸范围内的任意位置。偏置机构的工作过程如图6所示:

图6 偏置机构工作过程
2.3 新型偏置机构钻具的运动学分析
现有钻井工具的偏置原理如图7所示。其偏置机构通过偏心轮强行挤压芯轴,使芯轴弯曲变形,从而实现造斜的目的。这种偏置模式不仅偏置效果差,钻具造斜率低,而且芯轴持续承受高强度的交变应力,极易发生疲劳破坏[6]。因此,现有的钻井工具大都采用高强度钛合金作为芯轴的制作材料,价格昂贵、使用寿命低。
设计的偏置机构通过利用万向节驱动,彻底改善了芯轴的受力情况,不再承受高强度的交变应力。钻具的结构简图如图8所示:

图7 现有钻具受力情况简图
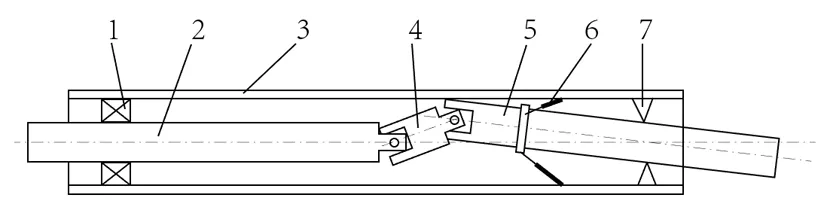
图8 钻具结构简图
5—芯轴;6—油缸;7—球头轴承
根据钻具的结构简图,同时忽略与钻具的实际运动无关的因素以及加工误差、装配误差等,建立出钻具偏置机构的运动学简化模型,如图9所示:
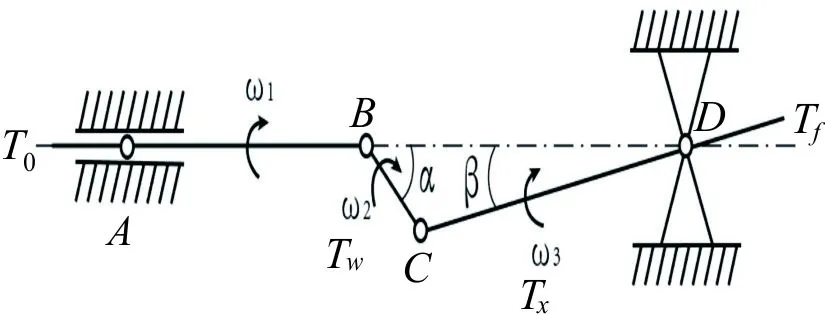
图9 钻具的简化运动学模型
在该运动学模型中,A、B、C、D为钻具的四个铰点,其中A点由轴承支撑,B、C点为十字万向节,D点为球头轴承支撑,其余各个参数的定义如下:
T0为驱动轴的输入扭矩,由驱动电机提供;TW为万向节中间轴的传递扭矩,由驱动轴通过十字万向节提供;TX为芯轴的输出扭矩,由中间轴通过十字万向节提供;Tf为钻头反馈的阻力扭矩,由钻头钻进过程中的阻力提供;ω1驱动轴的输出转速;ω2为万向节中间轴的输出转速;ω3芯轴的输出转速。
此外,由于转速和扭矩均通过十字万向节传递,存在一定程度的不均匀特性,驱动轴的输出转速ω1和万向节中间轴的输出转速ω2之间的关系可按公式(10)计算:
(10)
同理,芯轴的输出转速ω1和万向节中间轴的输出转速之间的关系可按公式(11)计算:
(11)
在正常的钻进作业过程中,若不考虑振动引起的电机转速变化,驱动轴的输入转速应为固定值,驱动轴的输出转速ω1也为常数。将公式(10)代入公式(11),可得式(12):
(12)
将公式(12)展开后,可得出万向节中间轴转速ω2的近似值,如式(13):
ω2=ω1·cosα·(1+0.5sin2α)+
0.5ω1·cosα·sin2α·cos2ω1t
(13)
同理,芯轴的输出转速ω1的近似值可按公式(14)计算:
(14)
在计算过程中,驱动轴、万向节中间轴以及芯轴均作为刚性零件计算,且忽略十字万向节内的轴承摩擦影响,根据扭矩、转速的关系,可得公式(15):
T0ω1=TWω2=TXω3
(15)
将公式(10)代入公式(15)中,可得:
(16)
同理,将公式(11)代入公式(15)中,可得:
(17)
3 结 论
设计的偏置机构通过引用Rostock运动结构的计算方法,并使用万向节作为钻井工具内驱动轴和芯轴的驱动方式,建立了新型钻井工具偏置机构的运动学模型,设计出以油缸为执行元件的偏置机构,并对其运动逻辑进行了分析,验证了该偏置机构在钻井工具中使用的可行性,可以作为钻井工具的优化改进的方向。
