模糊控制调节电压矢量占空比的永磁同步电机直接转控制系统
2020-04-20李耀华秦玉贵赵承辉周逸凡杨启东任佳越
李耀华,秦玉贵,赵承辉,周逸凡,杨启东,任佳越
(长安大学汽车学院,西安 710064)
0 引 言
直接转矩控制采用滞环控制器对电机的磁链和转矩进行砰-砰控制,系统响应速度快,在永磁同步电机领域得到广泛应用[1]。直接转矩控制转矩和磁链调节采用滞环控制器定性控制,使得转矩和磁链误差较大和较小时,一个采样周期内直接转控制输出电压矢量占空比均为1,产生较大的磁链和转矩脉动。因此,电压矢量的占空比应根据系统状态实时调节。模糊控制适用于较难精确量化控制的领域,设计简单,鲁棒性强,可用于解决永磁同步电机传统直接转矩控制较为粗糙的问题。文献[2-3]采用模糊控制器替代直接转矩控制传统开关表,取得较好的控制效果。文献[4-5]将零电压矢量引入至模糊控制来抑制转矩脉动。文献[6]将转矩角也作为模糊控制器输入变量,抑制转矩角较大时的转矩脉动。文献[7-8]设计了变论域的模糊控制器,提高了系统控制性能。文献[9-12]在开关表控制基础上引入模糊控制调节电压矢量实际作用时间,取得了较好的效果。
本文研究了永磁同步电机直接转矩控制、永磁同步电机传统模糊直接转矩控制,设计了模糊控制调节电压矢量占空比的永磁同步电机直接转矩控制系统,采用开关表选择电压矢量角度,采用模糊控制器调节电压矢量的占空比,仿真验证了模糊控制调节电压矢量占空比永磁同步电机直接转矩控制的可行性。仿真结果表明:基于模糊控制调节电压矢量占空比的永磁同步电机直接转矩控制系统运行良好,可实现四象限运行。与直接转矩控制和传统模糊直接转矩控制相比,模糊控制调节电压矢量占空比的直接转矩控制系统可有效减小磁链和转矩脉动,降低电流谐波含量,但由于每个采样周期要施加两个电压矢量,平均开关频率有所增大。
1 永磁同步电机直接转矩控制系统
永磁同步电机直接转矩控制系统如图1所示。
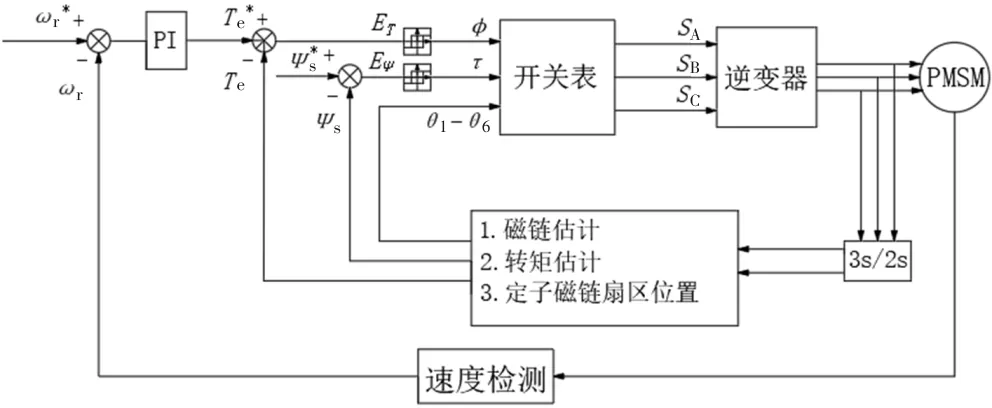
图1 永磁同步电机直接转矩控制系统
由图1可知,永磁同步电机直接转矩控制系统采用开关表对磁链和转矩进行控制,开关表如表1所示,其中φ和是定子磁链幅值和转矩滞环比较器输出结果,θ1-θ6为定子磁链扇区信号,V1-V6为逆变器输出的6个非零电压矢量[1]。

表1 永磁同步电机直接转矩控制开关表
基于Matlab/Simulink建立了永磁同步电机直接转控制系统仿真模型。仿真参数如下:系统采样周期为5×10-5s,参考转速初始为50 r/min,1 s时阶跃至-50 r/min,参考转矩初始为20 Nm,0.5 s时阶跃至-20 Nm,1.5 s时阶跃至20 Nm,参考定子磁链幅值为0.3 Wb,仿真时长为2 s。仿真用永磁同步电机参数如表2所示。

表2 仿真用永磁同步电机参数
在直接转矩控制下,永磁同步电机转速、电机转矩、定子磁链幅值、定子磁链轨迹、A相定子电流和A相定子电流THD分析如图2至图7所示。仿真结果验证了基于开关表的永磁同步电机直接转矩控制可行性。

图2 直接转矩控制下的电机转速

图3 直接转矩控制下的电机转矩

图4 直接转矩控制下的定子磁链幅值

图5 直接转矩控制下的定子磁链轨迹

图6 直接转矩控制下的A相定子电流
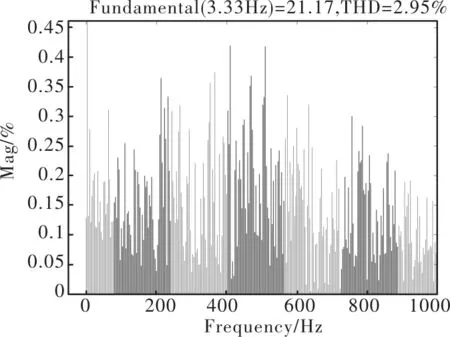
图7 直接转矩控制下的A相定子电流THD分析
2 永磁同步电机传统模糊直接转矩控制系统
永磁同步电机传统模糊直接转矩控制系统采用模糊控制器取代传统直接转矩控制中的磁链和滞环比较器及开关表输出电压矢量,如图8所示。
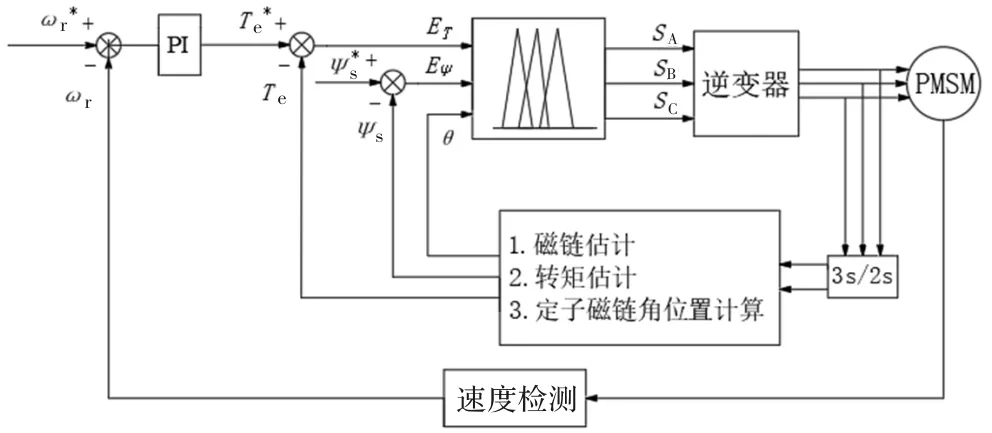
图8 永磁同步电机传统模糊直接转矩控制系统
模糊控制器输入量为定子磁链误差Eψ、转矩误差ET和定子磁链角位置θ,输出量为逆变器的7个基本电压矢量。
磁链误差模糊量Eψ论域为[-0.01 Wb,0.01 Wb],分为三个模糊子集{P,Z,N} ,隶属度函数如图9所示。

图9 磁链误差隶属度函数
转矩误差模糊量ET论域为[-2 Nm,2 Nm],分为5个模糊子集{PL,PS,Z,NS,NL},隶属度函数如图10所示。

图10 转矩误差隶属度函数
定子磁链角度模糊量θ论域为[-π,π],分为6个模糊子集{θ1,θ2,θ3,θ4,θ5,θ6},隶属度函数如图11所示。
先天性上睑下垂是指上睑部分或全部不能提起所造成的下垂状态,即注视前方时上睑缘遮盖角膜上部超过1/5,视物受到阻挡[3]。其病因复杂,主要分为肌肉源或神经源性。其中,肌肉源性为提睑肌发育不全或残缺,神经源性包括中枢性和周围神经发育障碍。先天性上睑下垂发病率为0.12%[4]。患儿因代偿而养成视物时仰头、皱额、耸肩等行为习惯,影响美观,且会影响颈椎的正常发育,引起废用性弱视、近视、散光等。目前先天性上睑下垂最有效的治疗方法为手术[5]。
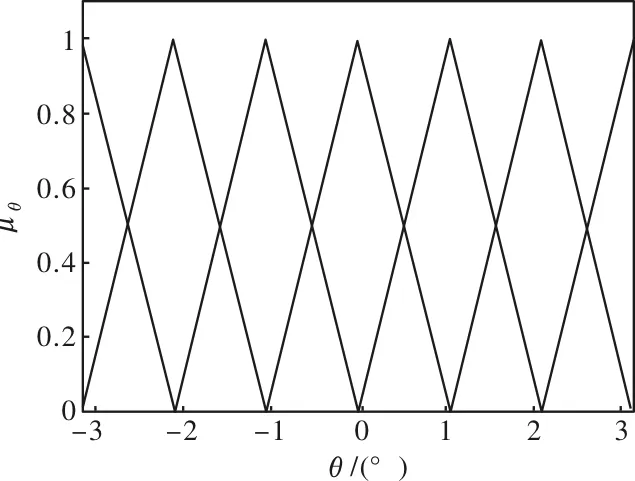
图11 定子磁链角位置隶属度函数
模糊控制器输出为逆变器离散的7个电压矢量{V0,V1,V2…V6},采用连续隶属度函数取代离散点集,隶属度函数如图12所示。
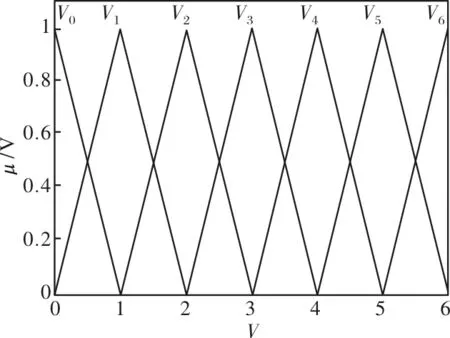
图12 电压矢量隶属度函数
模糊控制规则基于直接转矩控制系统已有的控制经验确定,如表3所示,共包含90条规则。由于零电压矢量可由两个开关状态(000或111)生成,具体选择以开关次数最小为原则[13-15]。
表3中模糊控制中的第i条控制规则如式(1)所示,其中Ai、Bj、Ck、Vn分别属于EΨ、ET、θ、V论域中的一个模糊变量,i=1-3,j=1-5,k=1-6,n=0-6。

Ri:if Eψ=Ai and ET=Bj θ=Ck then V=Vn (1)
模糊推理采用Mamdani型推理,解模糊采用max-min法,取最大隶属度对应的输出量为输出电压矢量。
相同仿真条件下,永磁同步电机传统模糊直接转控制系统的电机转速、电机转矩、定子磁链幅值、定子磁链轨迹、A相定子电流和A相定子电流THD分析如图13~图18所示。
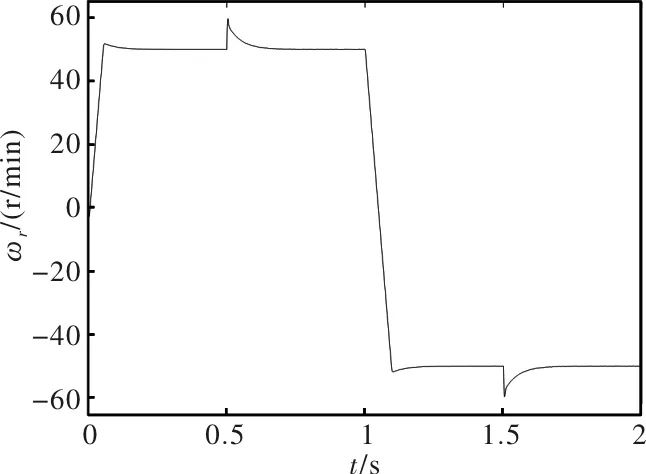
图13 传统模糊直接转矩控制下的电机转速

图14 传统模糊直接转矩控制下的电机转矩
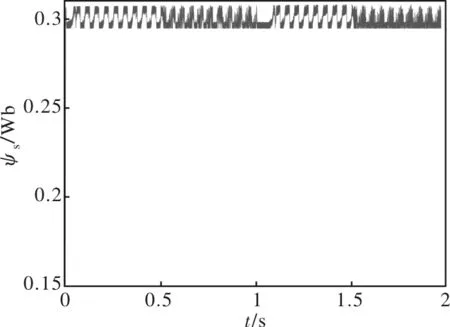
图15 传统模糊直接转矩控制下的定子磁链幅值

图16 传统模糊直接转矩控制下的定子磁链轨迹

图17 传统模糊直接转矩控制下的A相定子电流
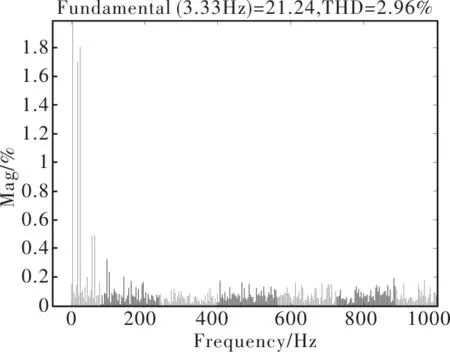
图18 传统模糊直接转矩控制下的A相定子电流THD分析
仿真结果验证了永磁同步电机传统模糊直接转矩控制可行性。与基于开关表的直接转矩控制相比,转矩脉动得到有效抑制。由于模糊控制器仅调节7个基本电压矢量,解决了磁链和转矩误差较大和较小时,开关表输出电压矢量相同,没有差异化控制的问题,但其输出电压矢量依然作用整个采样周期,转矩和磁链脉动依然有进一步优化的空间。
3 模糊控制调节电压矢量占空比永磁同步电机直接转矩控制系统
为了进一步减小磁链和转矩脉动,将电压矢量占空比作为模糊控制器输出变量,实现磁链和转矩误差较大和较小时,输出电压矢量作用占空比不同。模糊控制调节电压矢量占空比的永磁同步电机直接转矩控制系统如图19所示。由图19可知,系统采用开关表确定输出电压矢量,采用模糊控制器确定每个采样周期的输出电压矢量占空比。当占空比不为1时,采样周期内输出电压矢量作用时间以外的时间由零电压矢量填充,零电压矢量开关状态选择依然以开关次数最小为原则。

图19 模糊控制调节电压矢量占空比永磁同步电机直接转矩控制系统
模糊控制调节电压矢量占空比永磁同步电机直接转矩控制系统所用的开关表依然为永磁同步电机直接转矩控制开关表,如表1所示。调节输出电压矢量占空比的模糊控制器由模糊化、模糊推理和解模糊三部分组成,输入量为转矩误差ET、转矩误差变化率dET和定子磁链误差Eψ,输出量为电压矢量占空比δ(0≤δ≤1)。

图20 转矩误差隶属度函数
转矩误差变化率模糊量dET的论域为[-2,2],分为5个模糊子集{NB, NS, Z, PS, PB },隶属度函数如图21所示。
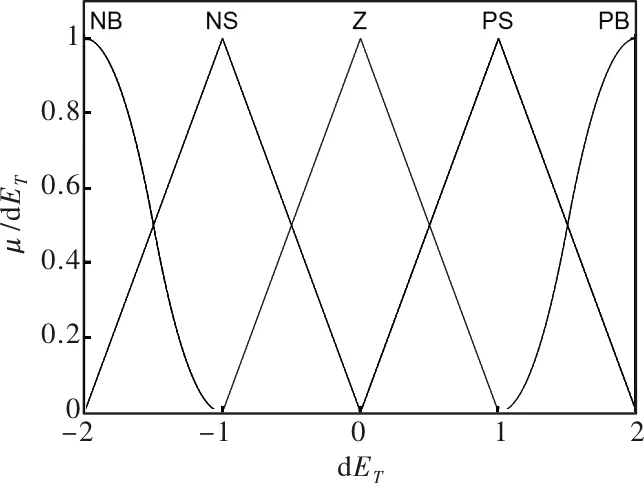
图21 转矩误差变化率隶属度函数
磁链误差模糊量Eψ论域为[-0.01Wb,0.01Wb],分为3个模糊子集{N,Z,P},其隶属度函数如图22所示。
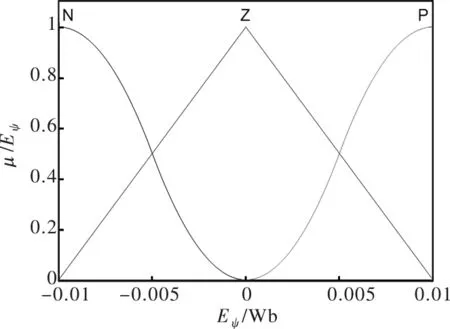
图22 磁链误差隶属度函数
电压矢量占空比模糊量δ的论域为[0, 1],分为5个模糊子集{ZL,SL,ML,RL,VL},隶属度函数如图23所示。

图23 电压矢量占空比隶属度函数
模糊控制调节电压矢量占空比的模糊控制规则制定如下:当磁链误差为Z时,表明此时磁链误差较小,不考虑磁链误差的影响,只考虑转矩误差和转矩误差变化率。转矩误差为Z时,表明要保持转矩不变,选择电压矢量占空比ZL。此时,输出占空比为零,等价于输出零电压矢量以保持转矩。转矩误差为NB,转矩误差变化率为NB时,即转矩需要较大减小,转矩误差变化率较大减小时,转矩误差与转矩误差变化率的变化方向一致,且都为NB,对转矩变化需求较大,选择最大的电压矢量占空比VL以满足需求。当转矩误差为NB,转矩误差变化率为NS时,由于转矩误差变化率较小的减小,则不需要选择最大的电压矢量占空比,选择RL即可满足需求。当转矩误差为NB,转矩误差变化率为Z时,即转矩需要较大减小,但转矩误差变化率保持不变时,减小转矩的需求更小,选择ML即可满足要求。当转矩误差为NB,转矩误差变化率为PS时,即转矩需要较大减小,转矩误差变化率较小的增大。由于转矩误差变化率会抵消一部分转矩的需求,选择ML可满足要求。当转矩误差为NB,转矩误差变化率为PB时,转矩需要较大的减小,转矩误差变化率在较大的增大,抵消了很大一部分转矩需求,因此选择SL即可满足要求。由此可得,模糊控制规则表如表4所示。

表4 模糊控制调节电压矢量占空比的模糊控制规则表(磁链误差为Z时)
当磁链误差为N或P时,磁链误差较大,不能忽略磁链误差的影响。当转矩误差为Z时,施加电压矢量占空比为ZL,即施加零电压矢量,只满足转矩需求,不完全满足磁链需求,产生较大的磁链波动。因此,将表4中的ZL变为ML,提高电压矢量的占空比快速满足磁链的要求,使磁链误差快速变为Z,系统再施加零电压矢量。在转矩误差ET为PS或PB时,基本电压矢量模糊控制器所选择的电压矢量能够满足快速增大转矩的需求,但不能快速增加或减少磁链。因此,将表4中的SL变为ML,保证磁链能够迅速增大或减小。当转矩误差ET为NS或NB时,基本电压矢量模糊控制器所选择的电压矢量可以满足快速减小转矩和增大或减小磁链的要求,则无需对表4进行调整。由此可得,模糊控制规则表如表5所示。
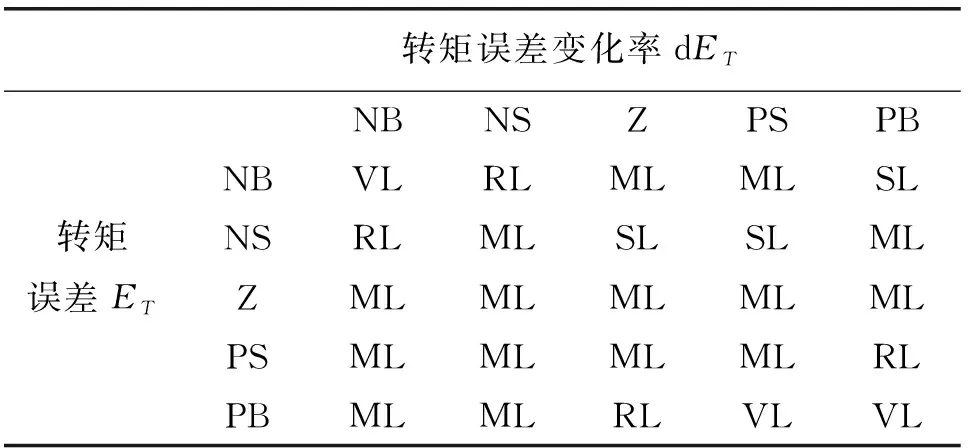
表5 模糊控制调节电压矢量占空比的模糊控制规则表(磁链误差为N或P时)
表4和表5中第i条控制规则如式(2)所示,其中Ai、Bi、δi分别属于ET、dET、δ论域中的模糊变量。
Ri:ifET=Aiand dETBithenδ=δi
(2)
模糊推理采用Mamdani型推理,输出电压矢量占空比如式(3)所示,式中uA、uB、uδ分别为转矩误差、转矩误差变化率和输出电压矢量占空比的隶属度,∩为Mamdani推理的取小算子,δ为输出电压矢量占空比。
(3)
解模糊采用max-min取小法,取最大隶属度对应的输出量为输出电压矢量占空比。
相同仿真条件下,模糊控制调节电压矢量占空比的永磁同步电机直接转控制系统的电机转速、电机转矩、定子磁链幅值、定子磁链轨迹、A相定子电流和A相定子电流THD分析如图24~图29所示。
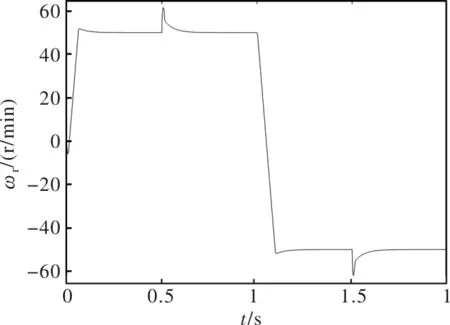
图24 模糊控制调节电压矢量占空比控制下的电机转速
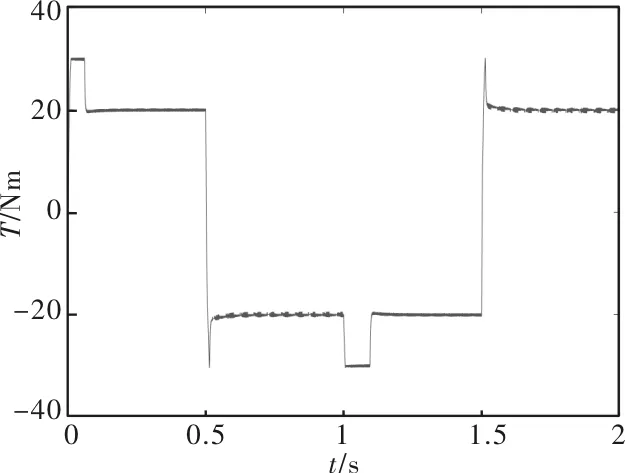
图25 模糊控制调节电压矢量占空比控制下的电机转矩

图26 模糊控制调节电压矢量占空比控制下的定子磁链幅值

图27 模糊控制调节电压矢量占空比控制下的定子磁链轨迹

图28 模糊控制调节电压矢量占空比控制下的A相定子电流

图29 模糊控制调节电压矢量占空比控制下的A相定子电流THD分析
上文仿真条件下,直接转矩控制与模糊控制调节电压矢量占空比控制下的电机转矩和定子磁链误差如图30~图31所示。
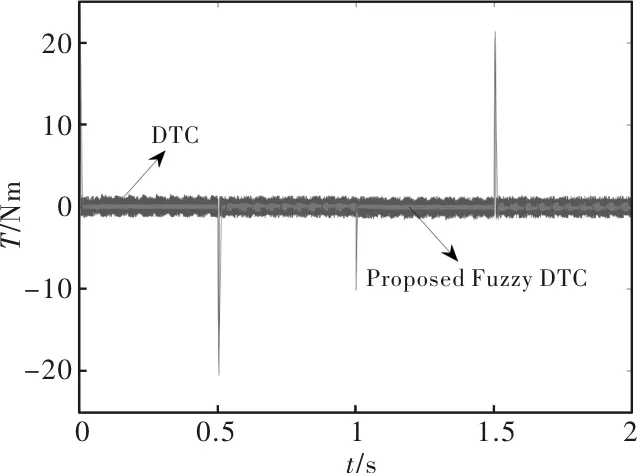
图30 直接转矩控制与模糊控制调节电压矢量占空比控制电机转矩误差

图31 直接转矩控制与模糊控制调节电压矢量占空比控制定子磁链误差
上文仿真条件下,传统模糊直接转矩控制与模糊控制调节电压矢量占空比控制下的电机转矩和定子磁链误差如图32-图33所示。

图32 传统模糊直接转矩控制与模糊控制调节电压矢量占空比控制电机转矩误差
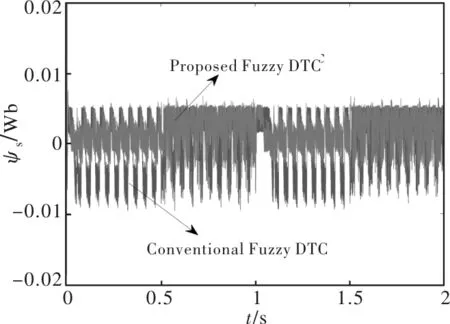
图33 传统模糊直接转矩控制与模糊控制调节电压矢量占空比控制定子磁链误差
定义转矩脉动均方根误差(Root Mean Squared Error, RMSE)、稳态磁链脉动RMSE和平均开关频率如式(4)~式(6)所示,其中n为采样个数,Nswitching为逆变器开关总次数,t为仿真总时长。
(4)
(5)
(6)
经计算,直接转矩控制、传统模糊直接转矩控制与模糊控制调节电压矢量占空比的永磁同步电机直接转矩控制系统稳态转矩脉动RMSE、稳态磁链脉动RMSE、平均开关频率及A相定子电流THD分别如表6-表8所示。

表6 直接转矩控制仿真结果

表7 传统模糊直接转矩控制仿真结果

表8 模糊控制调节电压矢量占空比控制仿真结果
由仿真波形和表6-表8可知:相比于直接转矩控制和传统模糊直接转矩控制,本文给出的模糊控制调节电压矢量占空比的直接转矩控制策略可有效减小磁链和转矩脉动,降低电流谐波含量,但由于每个采样周期内系统施加两个电压矢量,使得平均开关频率有所增大。
4 结 论
本文设计了模糊控制调节电压矢量占空比的永磁同步电机直接转矩控制系统,采用开关表选择电压矢量,采用模糊控制器调节电压矢量占空比,仿真验证了其可行性,与直接转矩控制和传统模糊直接转矩控制进行了性能对比,得出结论如下:
(1)模糊控制调节电压矢量占空比的永磁同步电机直接转矩控制系统运行良好,可实现电机系统四象限运行。
(2)相比于直接转矩控制和传统模糊直接转矩控制,模糊控制调节电压矢量占空比的直接转矩控制策略可有效减小磁链和转矩脉动,降低电流谐波含量,但平均开关频率有所增大。