基于盲源分离的脊柱波提取方法
2014-10-21汪云甲张俪文曹新运
汪云甲,张俪文,曹新运
(中国矿业大学 环境与测绘学院,徐州 221116)
基于盲源分离的脊柱波提取方法
汪云甲,张俪文,曹新运
(中国矿业大学 环境与测绘学院,徐州 221116)
传感器的位置和方向对行人惯性导航的定位算法选择和定位结果有重要的影响。针对传感器位置和轴向不固定引起的步伐探测失真,引入重力轴拟合和盲源分离算法,提取出行走过程中反应脊柱运动的脊柱波。实验表明,在四种常见姿态下,以脊柱波代替单轴向加速度波进行步伐探测,可将错误率稳定在5%以下。
重力轴;行人惯性导航;脊柱波;盲源分离
移动测量技术是近些年快速兴起的面向信息化服务的测绘技术[1],移动测量利用智能终端中的多元传感器,实时感知环境与人体状态,获取各种观测数据。行人惯性导航作为辅助定位导航技术,在GPS和泛在信号定位盲区[2-3]中起着重要的作用。
行走是由身体各部分协调配合产生[4-5],使用传统的车载和机载惯导方法会引入大量误差。针对手机中的低精度惯性传感器,行人惯导采用 SHS(Step and Heading System)方法代替 INS(Inertial Navigation System)实现距离和轨迹的估计。SHS是对行走采集的加速度波[6-8]进行步伐探测和划分,再对划分单元进行步长或速度估计,从而估计距离。其中步伐探测和划分对定位的结果有重要的影响。
文献[9]使用峰值检测的方法对加速度的峰值和谷值以及时间设定阈值来标记有效步,该方法模型简单,计算快,模型仅限于腰部采集数据,且不同实验者需要设定不同的阈值;文献[10]是利用步伐之间的相关性来标识有效步[11],文献[12]使用相似方法研究上衣口袋和前裤口袋采集数据,这两种方法考虑到加速度波的周期变化,计算结果更准确,但模型不适用四肢部位采集的数据;文献[13]是利用脚跟落地时加速度形成的过零特征[14-16],进行有效步识别,充分地分析了以双步周期为信号周期的情况,但仅适用脚部测量。
由此可见,以上算法仅适用一种或两种传感器放置位置(传感器姿态),对于位置随意变换的移动终端并不适用。本文对四种常见的传感器姿态的加速度信息进行研究,提取不同姿态中的共同特征信息,以提高步伐探测算法的适用性和精度。
1 重力轴加速度拟合
人体在行走过程中会产生各方向的加速度,步伐探测通常选择与运动平面垂直的加速度波作为检测源[5,7-9]。但在加速度计姿态未知的情况下,很难确定三轴之中与垂直方向接近的一轴,即使选择接近垂直方向的轴,也会包含其他方向的分量信息。
由于重力方向与人体竖直运动方向一致,本文选择重力方向作为监测方向。利用低通滤波去除重力加速度影响,得到重力加速度在各个方向的分量,重新拟合重力方向的加速度。
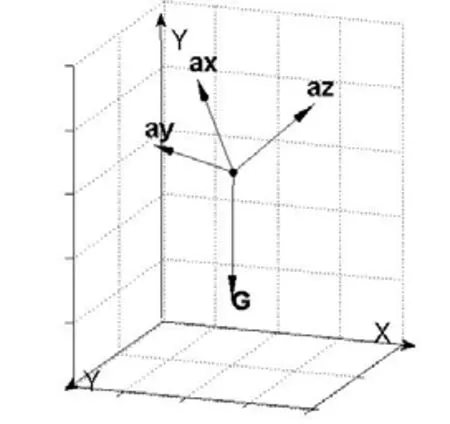
图 1 t时刻加速度计姿态Fig.1 Instantaneous coordinates of acceleration at time t
假设图1是加速度计在t时刻a点的姿态,其中ax、ay、az是加速度计的三轴,X、Y、Z是空间的三轴,G轴为重力轴。已知加速度计三轴上的数值分别为ax(t)、ay(t)、az(t),重力加速度在三轴上的分量为Gx(t)、Gy(t)、Gz(t),则此时的重力加速度G(t)为:

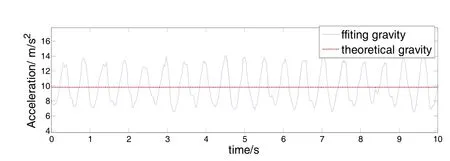
图 2 重力拟合值与重力理论值Fig.2 Gravity’s theoretical values and fitted ones
G(t)理论上为恒定值,但实际中会随运动而变化,如图2所示。这是由于G(t)中包含了一部分人体在重力方向产生的加速度而造成的。
设在t时刻ax、ay、az与重力轴G的夹角分别为α(t)、β(t)、γ(t),
令G轴上的加速度为g(t),则:

2 基于时域预测的盲源分离
设s (t) =[s1(t),s2(t) ,… ,sn(t )]T为n个源信号构成的n维向量,M个传感器测量到的数据为m维的向量x(t) =[x1(t),x2(t) ,… ,xm(t )]T,A是m×n维的混合矩阵,A、s(t)和x(t)之间关系如式(4)所示:

盲源分离的任务是在A和s(t)未知的情况下,得到分离矩阵W,使得

其中y(t)为s(t)的估计或拷贝[17-18]。
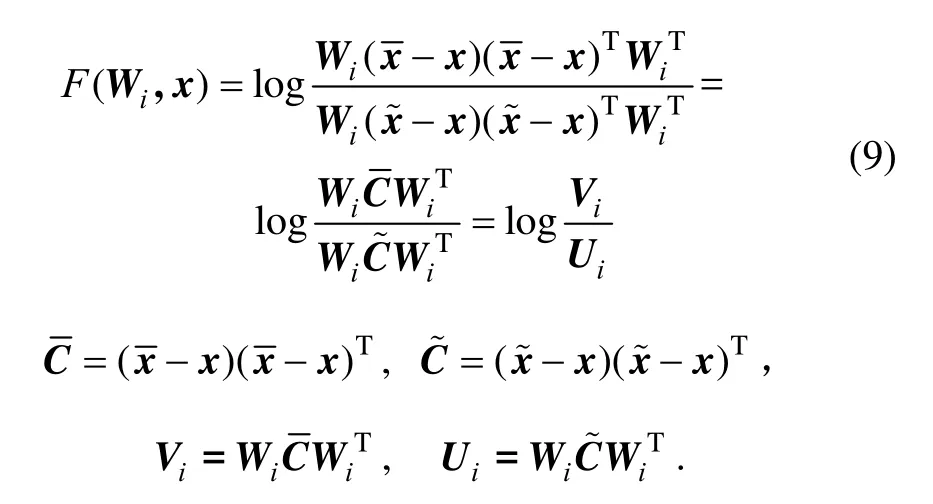
由于混合信号的可预测性小于或等于其中任意分量的可预测性[19],定义度量可预测性的函数 F(Wi,x):
式中, yτ= Wi·xt,yτ为信号y在τ时刻的测量值,xτ是m个传感器在τ时刻测得的m维向量。
式中, λS,L= 2-1/hS,L,hs和hL是设定的滤波特征值,hL至少为hs的100倍[19]。
对公式(9)两边求梯度得到公式(10):
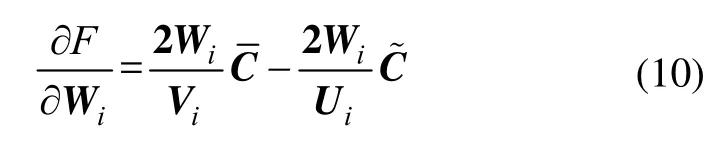
令公式(10)等于零,即为 F (Wi,x)的极值点:

通过求解,即可得到分离矩阵W。
3 盲源分离数据验证
3.1 数据说明
实验使用的加速度计为手机中内置的三轴加速度计,选择四种常见传感器姿态(见表 1)进行短距离和长距离步行的数据采集。实验场地为运动场跑道,地形平坦,无障碍物。
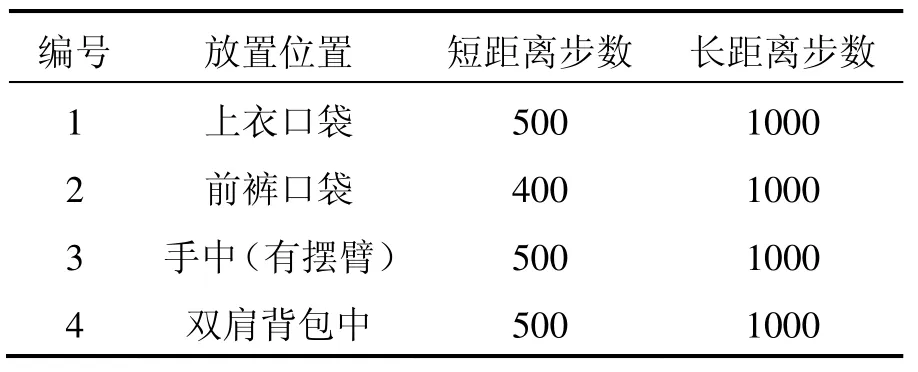
表 1 实验四种传感器姿态Tab.1 Four displacements of acceleration in experiments
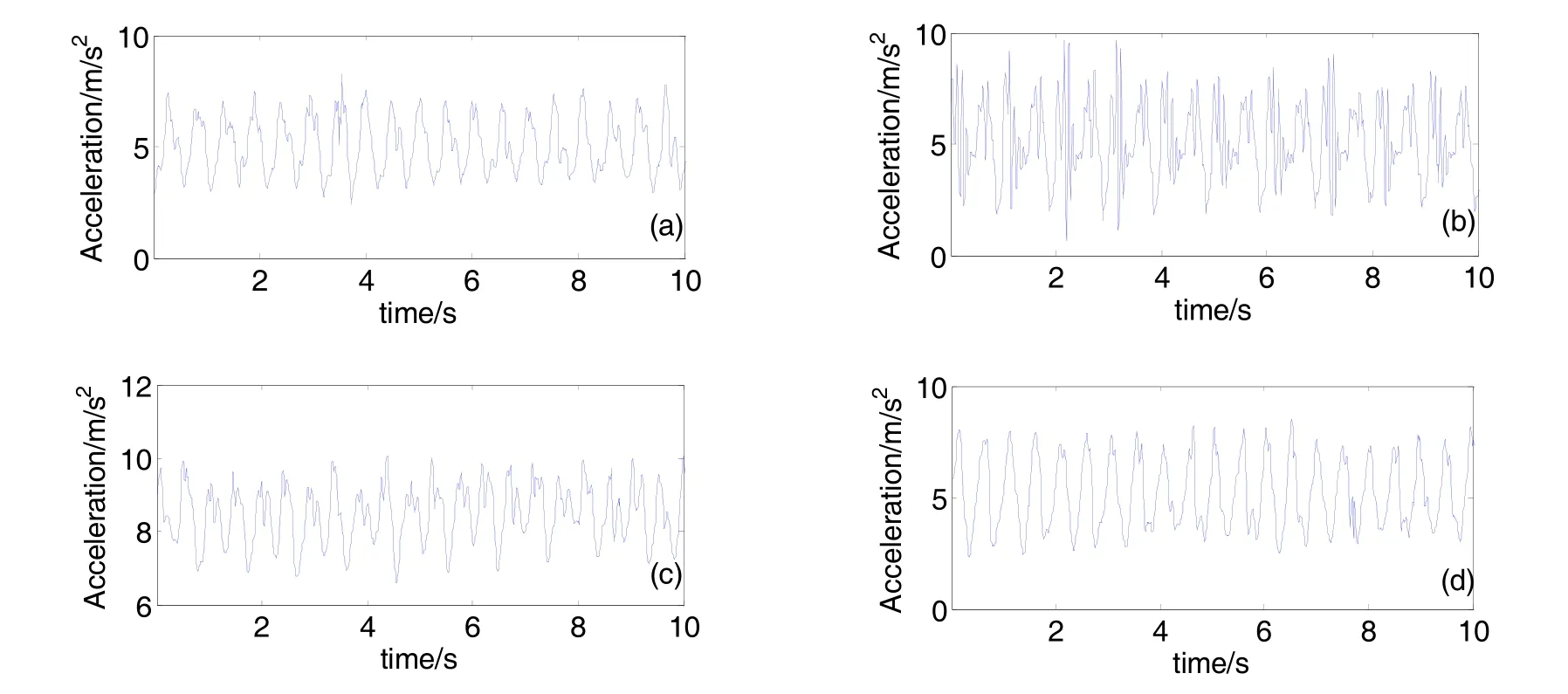
图 3 四种姿态的重力轴加速度:(a) 姿态1;(b) 姿态2;(c) 姿态3;(d)姿态4Fig.3 Fitting gravity of 4 displacements: (a) displacement1; (b) displacement2; (c) displacement3; (d) displacement4
3.2 时域分析
图 3所示是四种姿态行走十步的重力轴加速度波,根据波形特征,可以将上述四种姿态分为两类:第一类包括姿态1和4,该类波以单步为周期;第二类包括姿态2和3,以两步为周期。
关于国调直调电厂“两个细则”的讨论//王轶禹,马世俊,皮俊波,王春明,张健,李文锋//(16):174
产生分类的原因在于传感器放置的位置不同。在躯干上的传感器反映了脊柱垂直方向运动的加速度,即脊柱的重力轴加速度,称为脊柱波;而四肢上的传感器反映了脊柱与四肢运动的数据叠加,四肢上产生的数据成为扰动波。
图4所示为人行走的分步图,由于扰动波和脊柱波的周期不同,脊柱波以一步为周期,扰动波以两步为周期,并在两步之后恢复起始状态,因此四肢上获取重力轴的数据是以两步为周期。
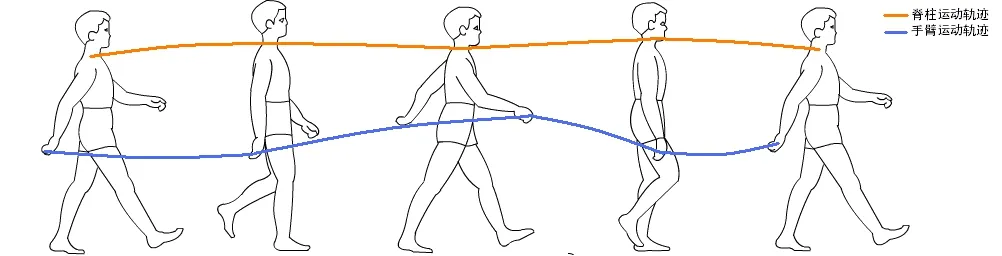
图 4 人体行走分步Fig.4 Gait phase
为了准确测得行走步数而不受姿态限制,需要将脊柱波从原有的波形中分离出来。
3.3 频域分析
图5所示为姿态3和4行走1000步的频谱图。姿态4为单峰分布,最高峰对应频率与步频相同;姿态3为双峰分布,双峰对应步频和步频的一半。频谱图证明了时域分析的结论:在四肢上放置的传感器获取的数据包括了以一步为周期的脊柱波和以两步为周期的干扰波。由于有四肢干扰波,无法判断步频所在的频率。图 6为一次行走过程中姿势3和4测得的重力轴波形,姿势3的波周期有一部分与步频相同,另一部分为步频的一半。因此,频率振幅最高峰不一定对应步频,但步频存在于最高峰频率f、f/2和2f之间,将这三种频率称为目标频率。
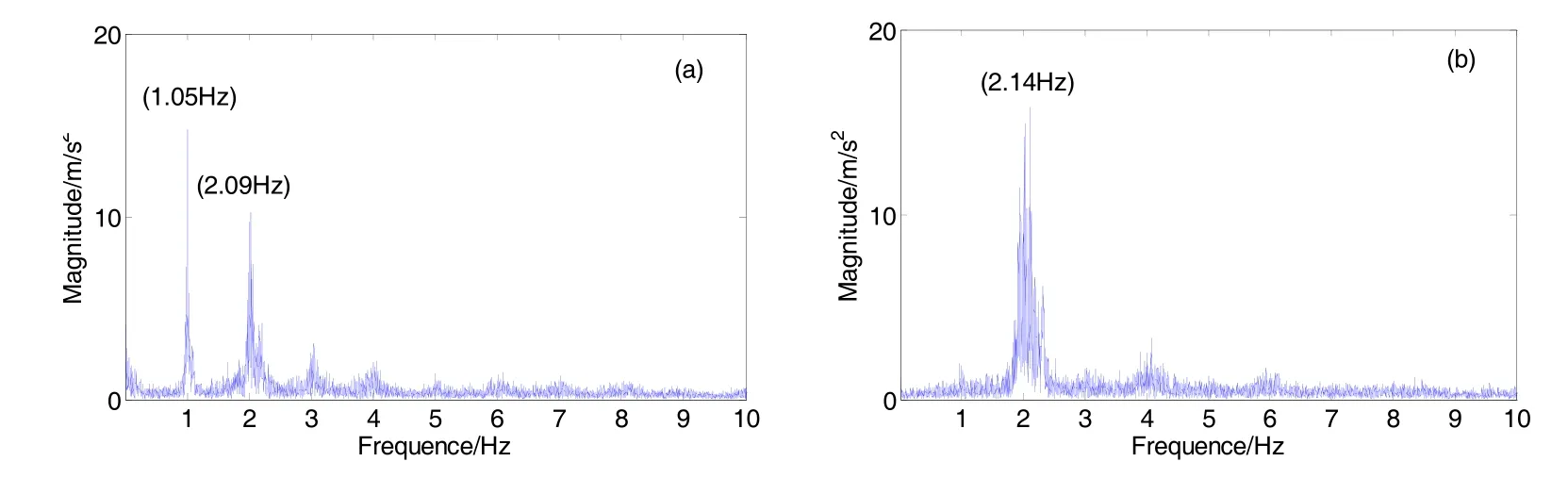
图 5 姿态3和姿态4频谱图:(a) 姿态3;(b) 姿态4Fig.5 Spectrum of walking: (a) displacement 3; (b) displacement 4
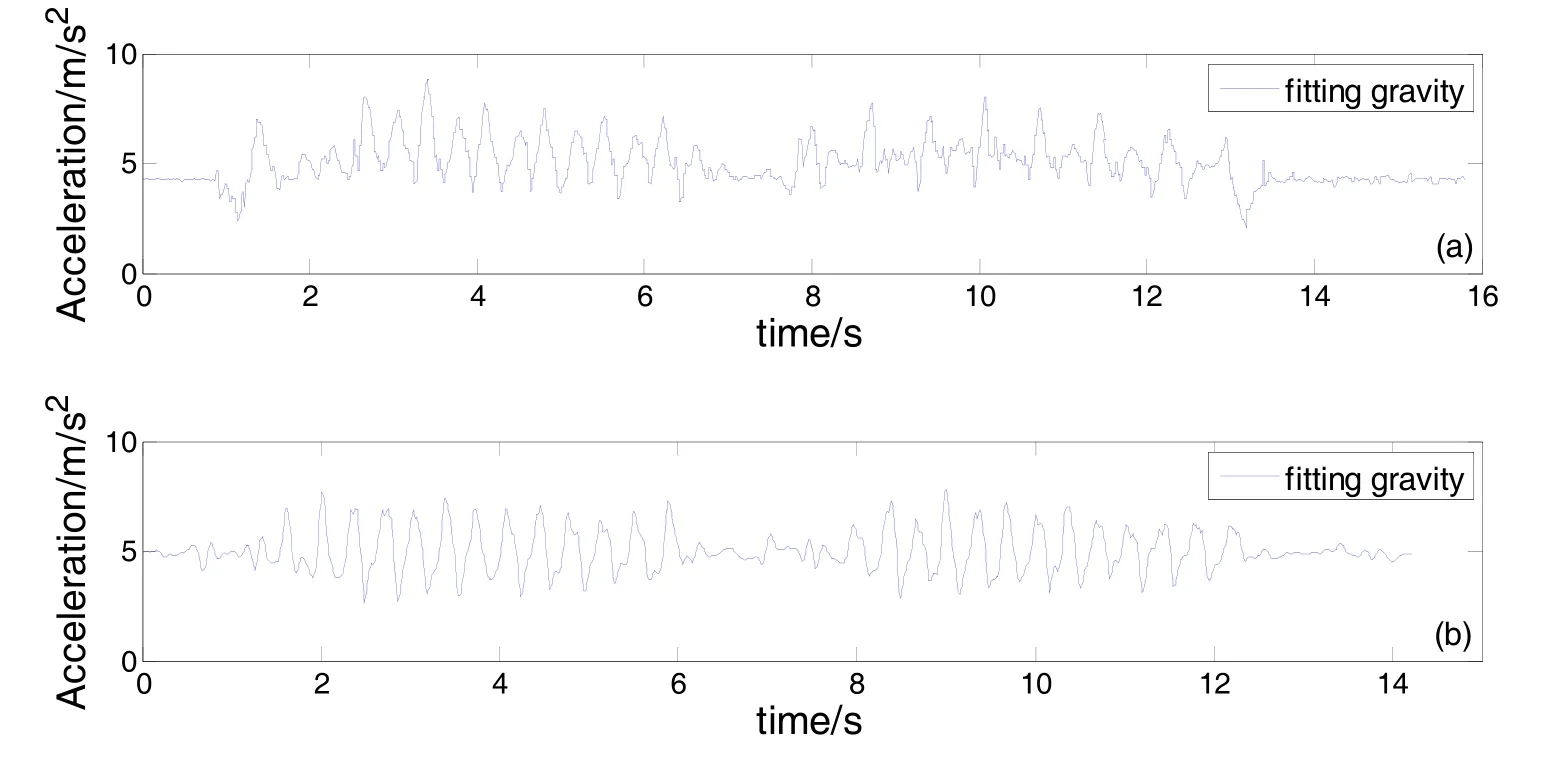
图 6 同时测量的姿态3和姿态4的时序数据:(a) 姿态3;(b) 姿态4Fig.6 Simultaneous acceleration readings of displacement 3 and 4: (a) displacement 3; (b) displacement 4
3.4 盲源分离结果
为了将脊柱波与干扰波进行分离,首先将 x、y、z和g轴中的目标频率分量进行放大,得到各轴新的波形作为线性组合,代入基于时域预测的盲源分离方法。实验以姿态3的数据为例,进行盲源分离结果的时域和频域分析。
图7所示为数据分离前后的时域结果,分离的脊柱波将姿态3中频率为步频一半的波恢复到步频。
图8所示为盲源分离前拟合重力g轴频谱图,频谱呈现多峰分布,波形中包括多种分量:直流分量,目标频率分量和高频分量。
图9所示为盲源分离后各个分量频谱图,9-a中波的强度不高,各个频率都有分布,此分量主要为噪声;9-b中2 Hz附近有明显波峰,此分量主要为脊柱波;9-c中1 Hz附近有明显的波峰,这部分分量是由手部摆臂运动产生,为干扰波;9-d中主要包括直流分量,是重力加速度在运动中的分量。脊柱波所在分量为9-b,即步频所在分量。由此可见,通过盲源分离的方法,可以准确地将拟合重力轴中的脊柱波提出,去除其余分量的干扰。
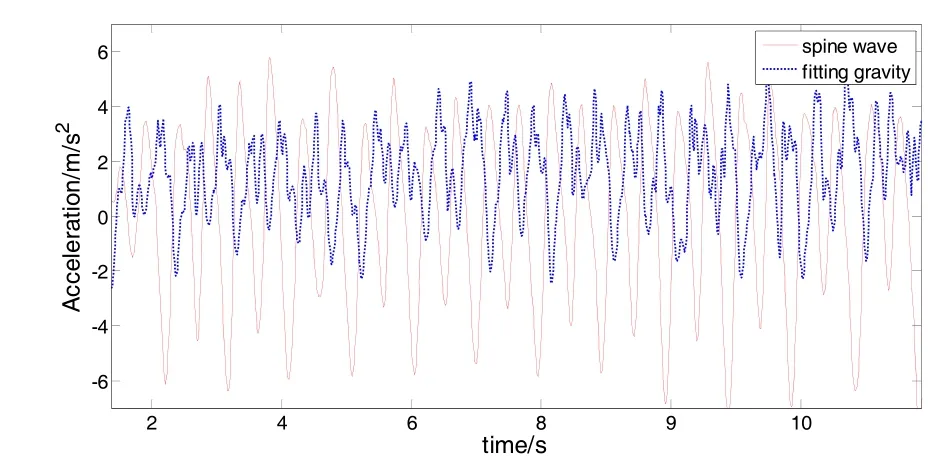
图 7 脊柱波与重力轴加速度Fig.7 Comparison of spine wave and fitting gravity
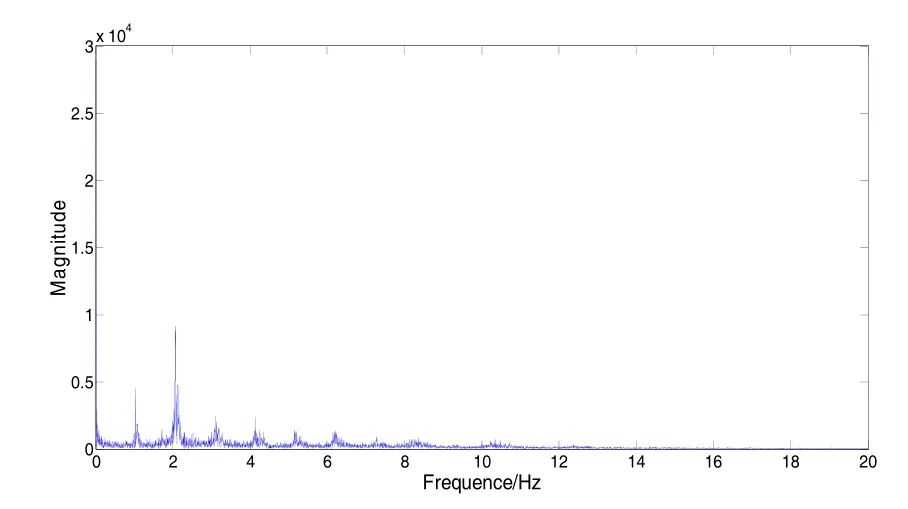
图8 拟合重力轴加速度频谱图Fig.8 Spectrum of fitting gravity
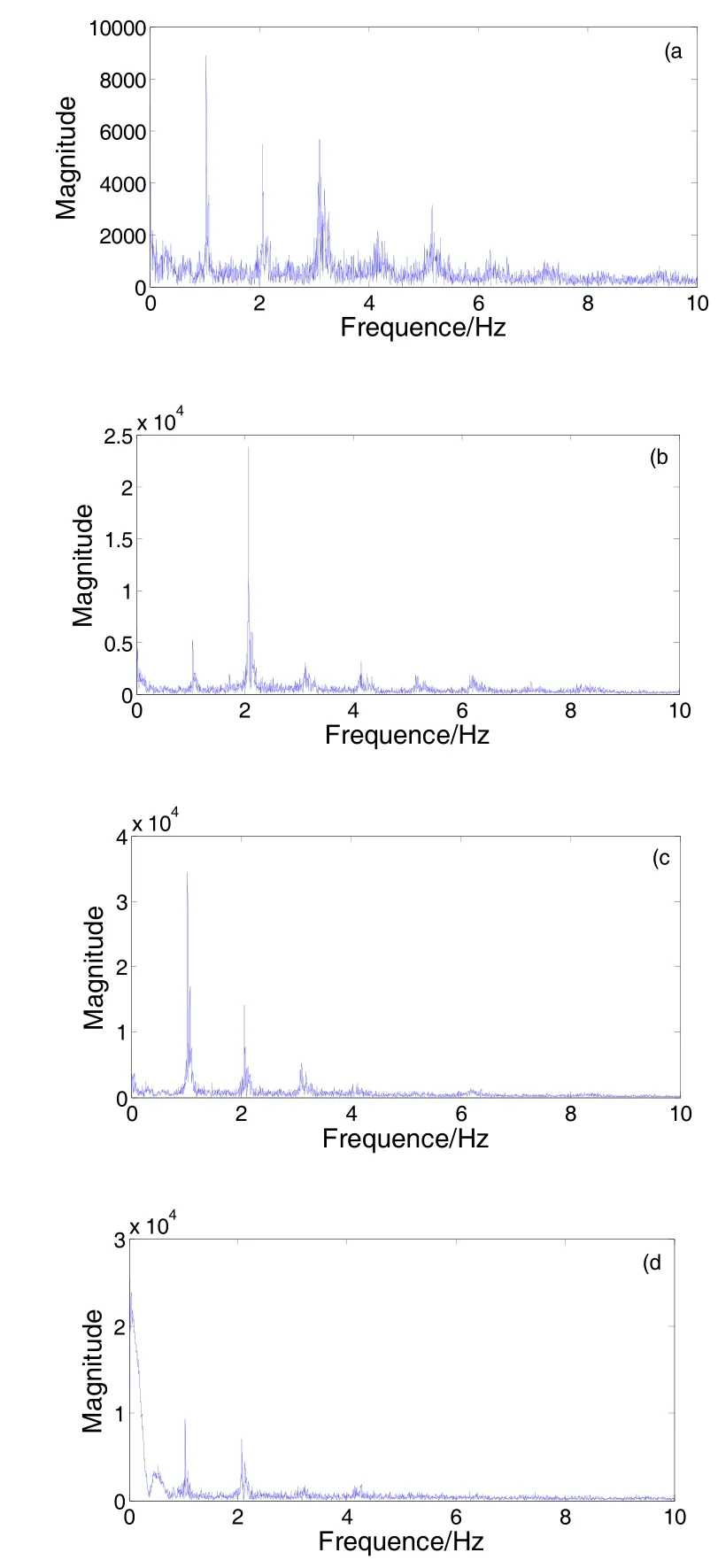
图9 盲源分离各分量频谱图Fig.9 Spectrum of each source signal from blind source separation
4 脊柱波在步伐探测中的应用
实验选择文献[9,10,12]中的方法进行测试,分别对三种方法标记为方法一、方法二和方法三。通过四种姿态的长短距离步伐探测实验,实验结果如表2所示。
第一种算法在使用垂直轴作为检测源结果很不稳定,错误率最高可以达到91.7%,最低降到5%,平均错误率为 54.7%;使用脊柱波可以使错误率稳定在4%~0.5%之间,平均错误率仅为1.7%,其中对第四类姿态有较大提高,平均错误率从92.1%降低至3.8%。
第一种算法使用原始数据错误率较高的原因在于运算和模型较为简单,假设单步波形为单峰结构,仅使用波峰、波谷和时间三方面的阈值作为限制,但原始数据中的扰动信息较多,会出现多峰和高频毛刺,造成匹配错误;通过盲源分离,数据更好地接近单峰模型,大幅度提高了匹配的准确率。
相对第一种算法,使用垂直轴数据,第二种和第三种方法的计步结果要精确一些,平均错误率为11.5%和9.6%,最大错误率不超过30%,尤其是第一、二姿态错误率仅为0.3%和4%。使用脊柱波后,计步结果除了在第一、二姿态的错误率保持较低水平,在第三、四姿态的错误率下降到5%以下。
第二种和第三种算法是基于周期自相关匹配,搜索临近的波形周期,因此准确率较高,但在姿势3和4中,由于波形中存在肢体末端(四肢和背包)的运动干扰,会出现较高的错误率;使用盲源分离提取行走信号,可以很好地剔除这种低频干扰,提高步伐探测精度。
由此可以看出,对不同姿态的步态加速度波进行脊柱波提取,并将脊柱波代入不同的步伐探测算法可以大幅度地提高计算的准确度,并使计算可适用于更多的传感器姿态。
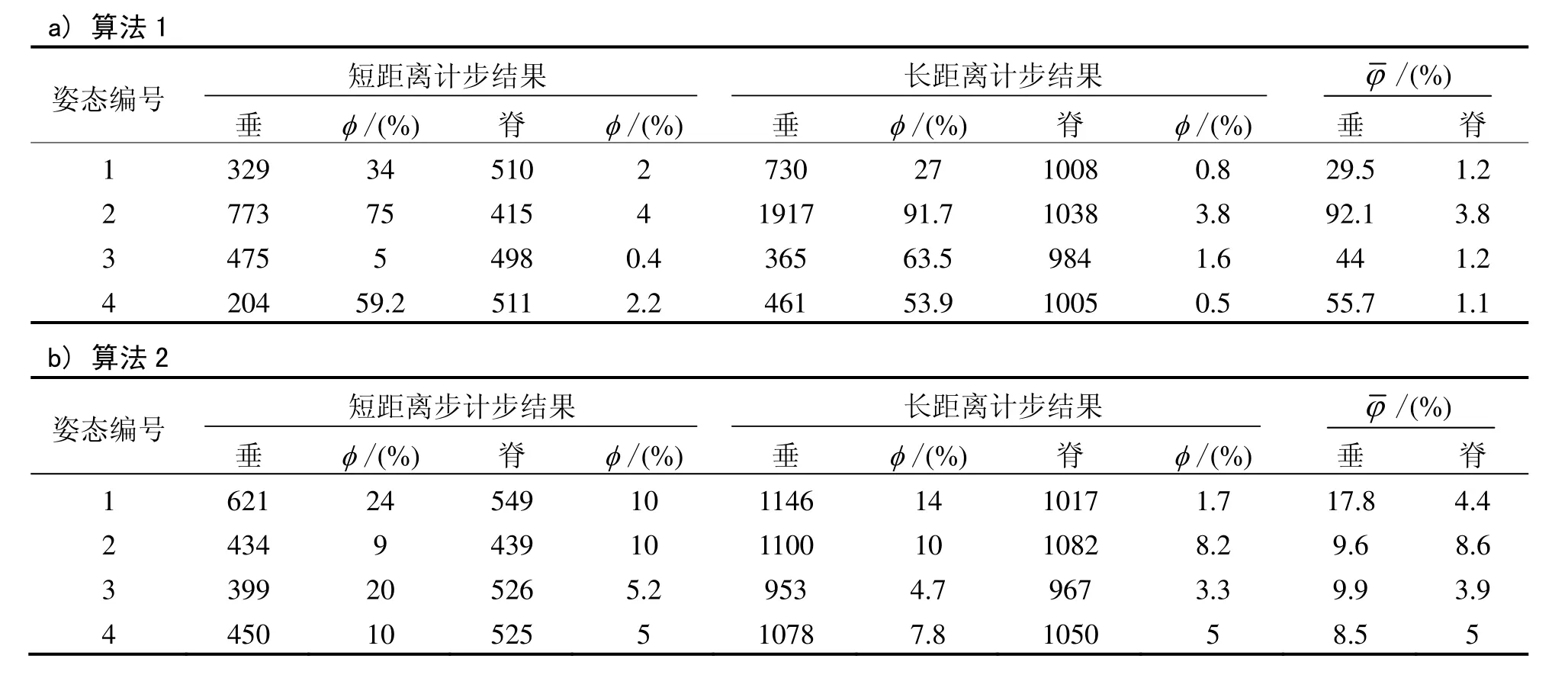
表 2 垂直轴和脊柱波计步实验结果Tab.2 Performance of each algorithm in reading from vertical axis and spine wave
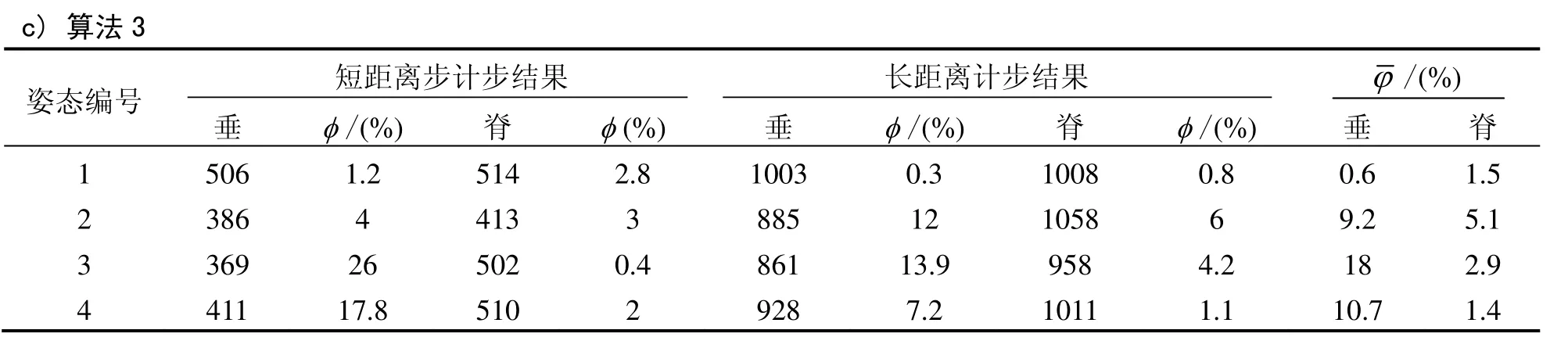
注:‘垂’- 垂直轴 ‘脊’- 脊柱波
5 结 论
1)利用重力加速度分量,对加速度计的原始数据进行重力轴拟合,解决了不同姿态垂直轴不固定的问题;
2)实验表明,盲源分离方法可以从多种姿态的拟合重力轴数据中分离出反应脊柱垂直方向运动的脊柱波,去除了由于人体四肢运动产生的干扰波;
3)步伐探测算法应用显示,脊柱波更能反映行走的步伐信息,可以有效地降低步伐探测的错误率,扩大算法的使用范围。
[1] 李德仁. 移动测量技术及其应用[J]. 地理空间信息,2006,4(4):1-5.
LI De-ren. Mobile mapping technology and its applications[J]. Geospatial Information, 2006, 4(4): 1-5.
[2] Leppäkoski H, Collin J, Takala J. Pedestrian navigation based on inertial sensors, indoor map, and WLAN signals[J]. Journal of Signal Processing Systems, 2013, 71(3): 287-296.
[3] Faragher R M, Sarno C, Newman M. Opportunistic radio SLAM for indoor navigation using smart phone sensors[C] //2012 IEEE/ION Position Location and Navigation Symposium. 2012: 120-128.
[4] Yang S, Li Q. Ambulatory walking speed estimation under different step lengths and frequencies[C]//2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. 2010: 658-663.
[5] Godha S, Lachapelle G, Cannon M E. Integrated GPS/ INS system for pedestrian navigation in a signal degraded environment[C]//Proceedings of the 19th International Technical Meeting of the Satellite Division of The Institute of Navigation. 2006: 2151-2164.
[6] 刘志丹. 基于手机加速度传感器的身份认证关键技术[D]. 长沙:中南大学,2013.
LIU Zhi-dan. Research on key technologies of the identity authentication basing on mobile phone acceleration sensor [D]. Changsha: Central North University, 2013.
[7] Harle R. A survey of indoor inertial positioning systems for pedestrians[J]. Communications Surveys and Tutorials, 2013, 15(3): 1281-1293.
[8] 张金亮,秦永元,梅春波 . 基于MEMS惯性技术的鞋式个人导航系统[J]. 中国惯性技术学报,2011,19(3):253-256.
ZHANG Jin-liang, QIN Yong-yuan, MEI Chun-bo. Shoe-mounted personal navigation system based on MEMS inertial technology[J]. Journal of Chinese Inertial Technology, 2011, 19(3): 253-256.
[9] Fang L, Antsaklis P J, Montestruque L A, et al. Design of a wireless assisted pedestrian dead reckoning system-the NavMote experience[J]. Instrumentation and Measurement, 2005, 54(6): 2342-2358.
[10] Ying H, Silex C, Schnitzer A, et al. Automatic step detection in the accelerometer signal[C]//4th International Workshop on Wearable and Implantable Body Sensor Networks. Springer Berlin Heidelberg, 2007: 80-85.
[11] 侯向锋,刘蓉,周兆丰. 加速度传感器MMA7260在步态特征提取中的应用[J]. 传感技术学报,2007,20(3):507-511.
HOU Xiang-feng, LIU Rong, ZHOU Zhao-feng. Application of accelerometer MMA7260 in the gait feature extraction[J]. Chinese Journal of Sensors and Actuators, 2007, 20(3): 507-511.
[12] Rai A, Chintalapudi K K, Padmanabhan V N, et al. Zee: zero-effort crowdsourcing for indoor localization[C]// Proceedings of the 18th Annual International Conference on Mobile Computing and Networking. 2012: 293-304.
[13] Kim J W, Jang H J, Hwang D H, et al. A step, stride and heading determination for the pedestrian navigation system [J]. Journal of Global Positioning Systems, 2004, 3(1-2): 273-279.
[14] Foxlin E. Pedestrian tracking with shoe-mounted inertial sensors[J]. IEEE: Computer Graphics and Applications, 2005, 25(6): 38-46.
[15] Yang S, Li Q. Ambulatory walking speed estimation under different step lengths and frequencies[C]//2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. 2010: 658-663.
[16] 谢波,江一夫,严恭敏,等. 个人导航融合建筑平面信息的粒子滤波方法[J]. 中国惯性技术学报,2013,21(1):1-6.
ZHANG Xian-da, BAO Zheng. Novel particle filter approach for fusing building plans into pedestrian navigation [J]. Journal of Chinese Inertial Technology, 2013, 21(1): 1-6.
[17] 高鹰,谢胜利. 一种线性混合信号盲提取算法[J]. 电子与信息学报,2006,28(6):999-1003.
GAO Ying, XIE Sheng-li. An algorithm for blind signal extraction of linear mixture[J]. Journal of Electronics and Information Technology, 2006, 28(6): 999-1003.
[18] Stone J V. Blind source separation using temporal predicttability [J]. Neural computation, 2001, 13(7): 1559-1574.
[19] 艾延廷,费成巍,张凤玲,等. ICA 在航空发动机振动信号盲源分离中的应用[J]. 振动测试与诊断,2010,30 (6):671-674.
AI Yan-ting, FEI Cheng-wei, ZHANG Feng-ling, et al. Blind source separation for aero-engine vibration signal by independent component analysis[J]. Journal of Vibration, Measurement and Diagnosis, 2010, 30(6): 671-674.
Extraction of spine wave from walking acceleration using blind source separation
WANG Yun-jia, ZHANG Li-wen, CAO Xin-yun
(School of Environment and Spatial Informatics, China University of Mining and Technology, Xuzhou 221116, China)
In pedestrian inertial navigation, a sensor’s position and direction have significant influence on the location algorithm’s selection and location results. In view of the pace detection distortion caused by the unfixed position and direction of the sensor, a blind source separation algorithm was investigated to extract the walking acceleration for gait detection. Firstly, the acceleration from triaxial accelerometer was processed by gravity axis fitting. Secondly, the spine wave, which reflects the acceleration of spine, was extracted by blind source separation. Experiment results show that the error rate under 5% and stronger suitability can be obtained by treating spine wave as input source of pedometer.
gravity axis; pedestrian inertial navigation spine wave; blind source separation
1005-6734(2014)04-0426-06
10.13695/j.cnki.12-1222/o3.2014.04.002
TP212.1
A
2014-05-07;
2014-07-28
国家863资助项目(2013AA12A201);江苏省高校优势学科建设工程资助项目
汪云甲(1960—),男,教授,博士生导师,研究方向为矿山测量、室内定位。Email:wyj4139@cumt.edu.cn
