星敏感器低频误差分析*
2014-04-17武延鹏钟红军李春艳
卢 欣,武延鹏,钟红军,李春艳,郑 然
(北京控制工程研究所,北京 100190)
O 引言
随着高精度星敏感器应用领域的不断拓展,对姿态精度的要求逐渐提高,与星敏感器温度和视场相关的低频误差(LFE)已经成为制约星敏感器研制的一个重要因素.低频误差的成因分析及测试已引起用户的高度重视,并提出明确需求,尤其是高精度对地观测卫星和高轨道卫星对星敏感器的低频误差要求越来越明确[1-3].本文主要介绍了星敏感器误差分类、低频误差的定义、误差产生原因及其测试标定方法.
1 星敏感器误差综述
1.1 误差指标体系
近年来,国际上出现了不同的星敏感器误差源分类,其中20世纪90年代初日本按照误差来源对星敏感器误差种类进行了划分,如图1所示.
根据2008年德国JENA公司与ESA星敏感器研制标准[1-3],其定义的星敏感器误差树主要包括时间误差(TE)、高空间频率误差(HSFE)、低空间频率误差(LSFE)、偏置稳定性误差(BS)和偏置误差(BE),如图2所示.
1.2 典型星敏感器低频误差指标
国外主流星敏感器产品中,德国JENA公司的ASTRO10星敏感器低频误差幅值约为7.6″,法国SODERN公司SED26星敏感器低频误差幅值约为3″,表1为国外典型星敏感器低频误差指标[4-7].
2 星敏感器误差分析
2.1 定义与成因
按照ESA标准[1],星敏感器测量误差包括如下几个部分.
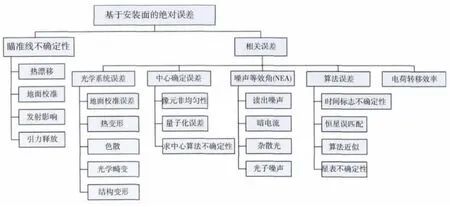
图1 星敏感器误差树(日本)Fig.1 Star sensor error tree(Japan)
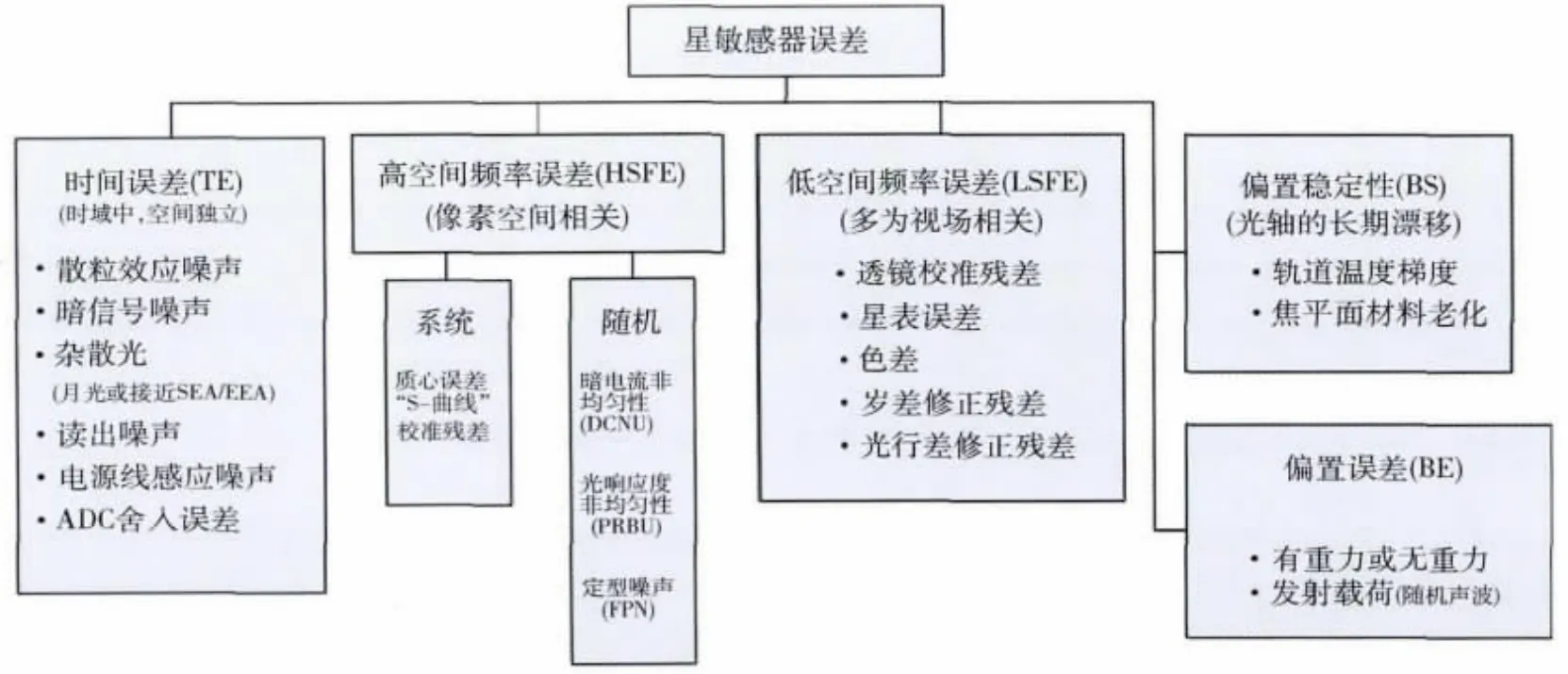
图2 星敏感器误差树(德国)Fig.2 Star sensor error tree(Germany)

表1 国外典型星敏感器低频误差指标Tab.1 Low frequency error of typical star sensor
(1)偏置
测量坐标系相对于机械安装坐标系之间的偏差,其成因包括光学基准测量误差和基准稳定性误差,在轨后保持不变.
(2)视场空间误差
单星定位误差产生的姿态测量误差,主要来源是镜头畸变残差.具有空间周期性,通过星敏感器角速度的作用,视场空间误差转化为时域误差.根据角速度的大小,转化后时域误差周期性差别较大.当角速度为0时,表现为偏置误差.当高角速度时,表现为时域高频随机误差.对于低地球轨道(LEO),卫星角速度约为0.06(°)/s,视场空间误差是时域低频误差的重要来源.
(3)像素空间误差
由探测器空间不均匀性及星点定位算法带来的测量误差.探测器空间不均匀性包括PRNU、DSNU、暗电流尖峰、FPN等.通过星敏感器角速度的作用,像素空间误差也转化为时域误差.对于高等级CCD探测器而言,不均匀性表现为空间白噪声特性.CMOS器件由于成像机制的原因,可能产生FPN噪声,即系统性的不均匀性,在采取明场/暗场校正措施后也基本表现为空间白噪声特性.对于LEO卫星星敏感器而言,探测器空间不均匀性一般表现为0.1~0.5s周期的时域高频白噪声.
星点定位算法误差是指采用的亚像元定位算法带来的误差.其空间周期为1像素.对于LEO卫星星敏感器而言,通过角速度转化后表现为0.1~0.5s周期的时域高频误差.
(4)时域误差
由硬件噪声产生的测量误差,与空间无关,属于时域白噪声随机误差.来源包括散粒噪声、读出噪声、量化噪声及星时误差.
(5)热弹性变形误差
由于在轨的热变形导致测量系相对于机械系发生的慢变漂移误差.其主要影响因素有轨道热环境、安装面热边界条件、整机温度梯度.对于LEO卫星,一般表现为轨道周期特性的规律变化,属时域低频非随机误差.
(6)光行差
由于星敏感器在惯性系的运动速度导致的观测误差.该项误差有系统性的校正手段,可在姿态层面或者星点层面进行不同程度的补偿.
2.2 误差分析
综合分析,偏置和光行差可采取系统性校正手段弥补,影响可以忽略.视场空间误差、像素空间误差、时域误差及热弹性变形误差项是星敏感器输出姿态具有的主要误差特性.
就LEO卫星应用而言,像素空间误差和时域误差两项为时域高频白噪声,在星敏感器或者AOCS的Kalman滤波器中可以有效地抑制.视场空间误差项表现为时域低频有色噪声,热弹性变形误差项是时域非随机噪声.二者使用Kalman滤波不能有效滤除.
因此视场空间误差项和热弹性变形误差项是星敏感器输出姿态呈现周期性波动的主要原因,即所谓的“短周期项误差”,如图3所示.因此需对其成因进行深入分析,方可确定改进的技术途径.
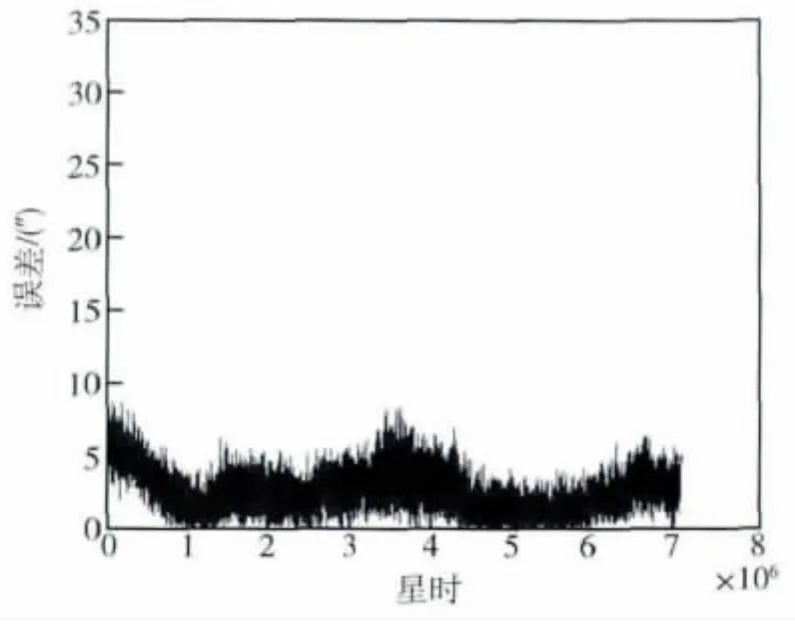
图3 星敏感器地面观星的典型测量误差曲线图Fig.3 Typical error of star sensor according to the ground observing data
星敏感器地面观星的典型测量误差曲线如图3所示,高频随机误差和低频误差叠加在一起,共同影响星敏感器的测量精度.
2.3 低频误差成因及控制措施
2.3.1 视场空间误差成因
(1)点扩散函数随视场位置的变化
越接近边缘视场,像差越大,星点扩散函数越偏离理想形状,引入星点定位误差.
(2)镜头焦距和畸变标定后的残余误差
镜头焦距在标定后的残余误差包括热变形引起的焦距变化,畸变标定后的残差包括不同光谱型恒星导致的色差定位误差.
(3)光行差修正残差
仅在姿态层面修正时会产生修正残差,逐个星点修正时,该项误差可消除.
(4)星表误差
导航星表导出所依据的天文星表的测量精度、恒星自行及视差修正后的残差.
2.3.2 热弹性变形误差成因
在星敏感器受到周期性的热输入时,整机的温度场会发生周期性变化,产生周期性的结构热变形.当热变形影响到光学系统与像面的对准关系时,将产生热弹性误差.
热弹性误差成因较为单一,在轨热环境较为复杂,包括:
1)阳照和阴影影响;
2)致冷器开关引起的功耗变化;
3)安装面温度及温度梯度;
4)热控系统的热控动作;
5)地球返照.
阳照区星敏感器安装底板温度升高,阴影区温度降低,长期趋势是温度不断降低,温度低到限值时,加热器启动,将温度提高.
以上输入条件综合作用,结合热滞后作用,产生了周期性的温度变化,进而影响到星敏感器的指向.
2.3.3 减小视场空间误差技术途径
视场空间误差影响每颗观测星的星点定位精度.
(1)点扩散函数影响
减小视场,优化光学系统设计,使点扩散函数随视场变化最小.以10°视场缩小到5°视场为例,该项误差可由3~5″减小至1″左右.
(2)标定残差
采取细分标定技术减小畸变残差.采用分区标定后的畸变残差由3.8″减小至0.9″,如图4 ~5 所示.
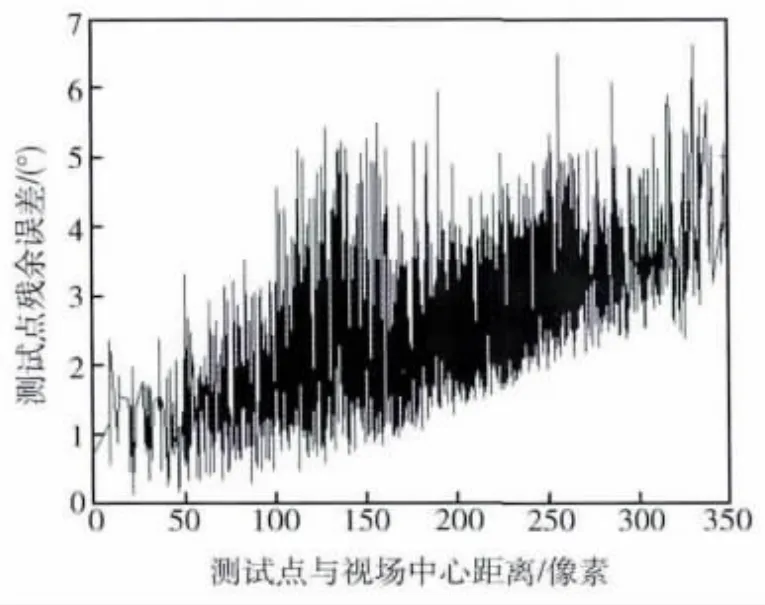
图4 整体标定后畸变残差Fig.4 Distortion error after calibration
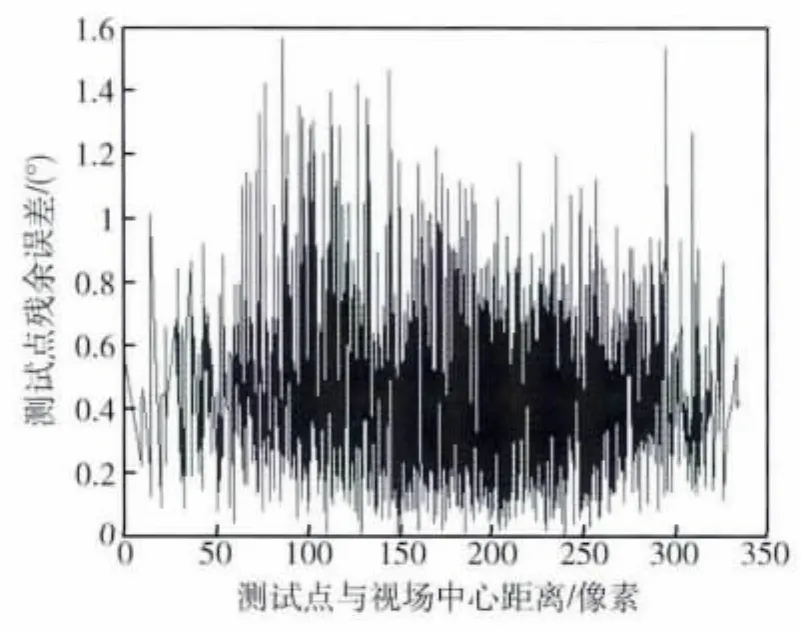
图5 细分标定后畸变残差Fig.5 Distortion error after partition calibration
采用像方远心光路可大幅度抑制由温度引起的焦距漂移.残余变化可使用高低温标定设备标校,配合多光谱型恒星模拟器,对不同光谱型恒星标定产生相应的校正公式,可标校补偿色差影响.预计该项误差可由3~4″减小至1″左右.
(3)光行差修正误差
采用星点修正,校正后误差可忽略.
(4)星表误差
采用基于ICRS(国际天球参考坐标系)的天文星表,修正自行和视差,该项误差可降至0.1″以下.
综合上述结果,预期单星视场空间误差可减小至角秒极.以5°视场内平均16颗导航星计算,光轴测量误差可减小至亚角秒级.
2.3.4 减小热弹性变形误差技术途径
以热-光-机多学科交叉设计为依托,进行光机结构优化设计(包括分体式结构、钛和AlSiC应用),提高整机热稳定性,使热学环境对星敏感器姿态测量精度的影响降至最低.以2℃温度变化范围为例,可将该项误差控制在0.4″以内.
2.3.5 减小低频误差的预期效果
表2为减小低频误差的预期效果(短周期项).
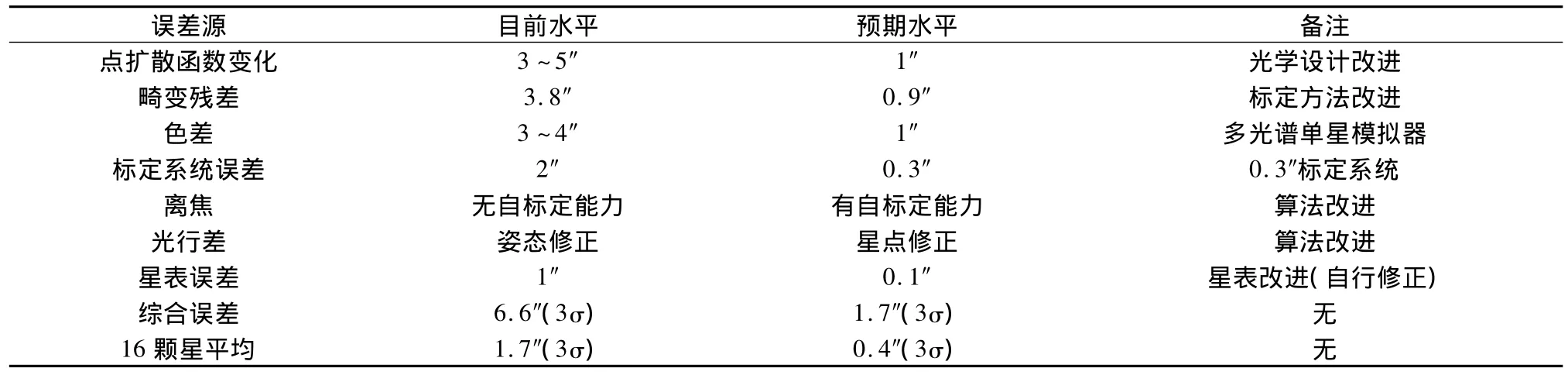
表2 减小低频误差预期效果(短周期项)Tab.2 Low frequency error budget assessment(short periodical term)
表3为减小低频误差的预期效果(长周期项).

表3 减小低频误差预期效果(长周期项)Tab.3 Low frequency error budget assessment(long periodical term)
3 星敏感器低频误差控制实例
法国SODERN公司开发的SED36星敏感器继承了一体化SED26星敏感器的探测器、线路及软件设计,采用分体式结构,包括光学探头(直接安装于载荷)、线路盒及遮光罩3个部分,如图6所示.表4为SED36及SED16/26典型单星误差预估值[8-11],低频误差细分为随轨道时间变化的轨道误差及取决于视场中被跟踪的星位置的视场误差.
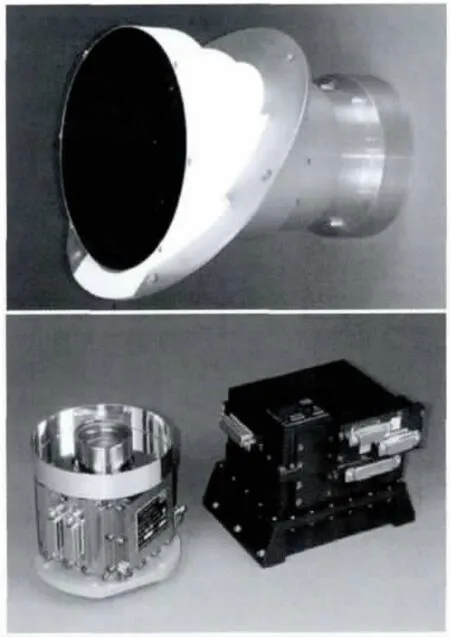
图6 SED36星敏感器Fig.6 SED36 star sensor
3.1 结构优化
(1)最大程度降低热影响,减小姿态的低频误差.光轴的热漂移对所有被跟踪的恒星在量级和方向上是一致的,不是星数的平均值.大约此误差的一半来自于受太阳照射的遮光罩的热扩散.SED36星敏感器结构分为3部分,能最大限度减小热耦合,降低热影响,减小姿态的低频误差(LFE).如光学探头安装于昴星团卫星载荷,避免额外的结构变形,以获得最佳精度,遮光罩安装在卫星结构上.
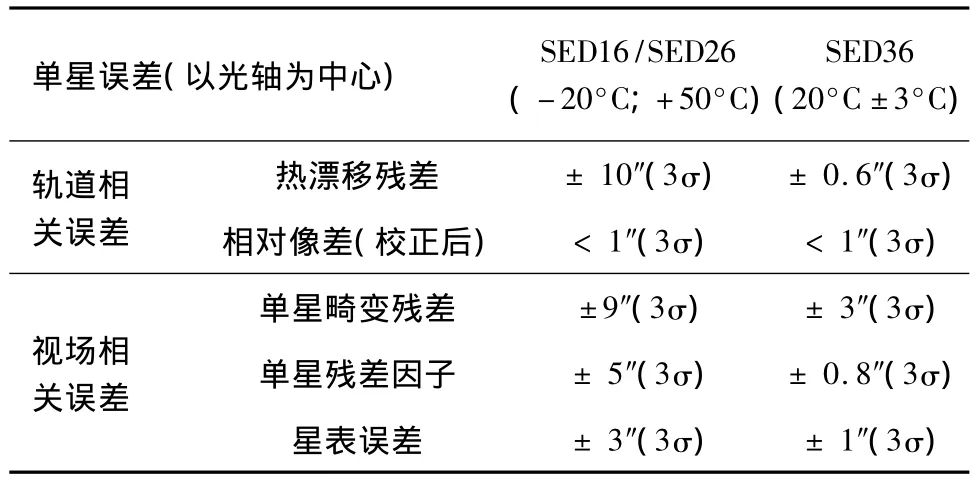
表4 SED36及SED16/26典型单星误差预估值Tab.4 Typical single star error budgets of SED 36 and SED 16/26 star sensor
(2)线路盒与光学探头分离,保证光学探头接口处的功耗最小,将与卫星接口温度控制在20°C±3°C,可获得亚角秒级光轴指向稳定性.
(3)考虑昴星团卫星接口特性(SiC),将铝主结构更换为钛和AlSiC组合体,与载荷的SiC接口形成很好的匹配并保持刚性和稳定安装.
3.2 畸变的精确校准及修正
第二类误差项为光学畸变的修正残差.在SED16/26星敏感器中,采用三阶多项式得出校正后的残差小于±9″(3σ).利用6000 K色温星模拟器,在SODERN的BCG16测试转台上完成,并采用精度更高的畸变校正方法.
(1)评估测试转台精度、现有的恒星光谱型校正灵敏度以及安装面温度变化.畸变校正测量的重复为 1″(3σ),转台的绝对角度精度为 ±1″(3σ).测试过程中测试平台的校正极限为±2″(此方法精度极限).合理布置视场中校正星位置用以平均转台周期性的误差.考虑跟踪模式所选用的星表星的光谱分布,色畸变残差可以忽略,多数被跟踪星的色温接近6000 K(模拟色温用于校准).当安装面温度在校正温度20℃ ±3°C范围变化时,所测得的性能下降 ±0.5″(3σ).
(2)比较畸变校正方法的性能,用以评估能校正性能并统一参数.评估校正方法如下:
a)高阶多项式(X/Y)(SED16/26采用三阶多项式);
b)Zernike多项式 (模拟光学像差,用于修正光学畸变影响);
c)局部修正(将视场分割为若干小视场范围).
在BCG16测试台上经4台SED16测试完成3种方法的比较,为获得准确的评估,视场中设置了1000个测试点.已在Matlab上开发专用算法用以评估相应残差.高阶X/Y多项式与Zernike多项式的校正结果近乎相同.多项式超过10阶时,每种校准方法对校准点而言近乎完美,但在测试点间存在高频变化,其他测试点的校准结果稍差.在视场中若干小区域中利用局部校正方法是有效的,区域划分越细校正残差越小,只受限于测试平台精度.
(3)评价相关约束.局部校准方法最为有效,允许的最大校正参数所能获得的性能需依据以下约束进行评估:
a)校准参数数量需与SED36星敏感器的存贮器容量相适应;
b)额外的校正时间应与工作频率相适应(此时间不是主要约束);
c)校准区域的数量应与在测试台的校准流程相适应,如果校准时间超过10 h,需考虑测试平台受室温微小变化引起的长周期漂移的影响.
校准测量的持续时间是SED36的主要约束.测试表明,当局部校准区域数量增加至测试平台精度极限时,校准时间需小于10 h.
(4)修正星敏感器地面测试软件
为获得有效校准,在采用局部校准前仍需采用三阶多项式,即两步校正.为避免被跟踪星由一个校准区域移动至相邻校准区域引起姿态变化,在相邻校准区域采取插值方法,改进测试平台软件完成用于此特殊校准的自动标定:
a)设置测试点用于平均转台的周期性误差:角度分度为周期性误差的一半;
b)测试平台软件避免在CCD有缺陷的像素或像素列上进行位置标定,防止校准偏离;
c)周期性测试CCD中心像素坐标,监视测试台的长周期漂移,一旦测出漂移,中间测量将重新进行,标定点位置将得以修正.
(5)利用SED36工程件,在BCG16测试平台进行确认.图7为X轴和Y轴测试误差柱状图.考虑安装面温度及测试平台精度影响,单星畸变确认测量残差为±2 ″(3σ),全天球单星畸变误差可达 ±3 ″(3σ).

图7 X和Y轴测试误差柱状图Fig.7 Error histogram for X-and Y-axis
3.3 星表更新
优化热误差及畸变残差后,星表的低频误差易于降低.此误差主要源于恒星的自行,参考星表的位置测量误差可忽略.
星表误差在15年期间为±3″(3σ),星表中恒星位置以2000-01-01给出.昴星团卫星计划2013发射,SED36导航星表位置更新至2013-01-01,恒星数量不变,只由参考星表提供的自行信息修正其位置.星表更新后,在昴星团卫星任务期间,星表误差约为±1″(3σ).
3.4 增加跟踪星数量
为更好地平均视场误差,SED36星敏感器跟踪星数量由10颗(SED16/26)增加至12颗 ,已验证SED36在8Hz数据更新率下可跟踪12颗恒星,且在跟踪模式下,视场中全天球多于12颗星的概率约为99%.此项改进容许降低姿态中视场相关误差约10%(假设恒星权重一致的条件下).
3.5 姿态确定精度
SED36星敏感器在采取本节描述的所有改进措施后,单星精度估计用以评价SED36星敏感器的低频误差.低频误差约为 ±1″(X、Y轴)、±7″(Z 轴,3σ),而 SED16 为 ±11″(X、Y 轴)、±30″(Z 轴,3σ).
改进的效果是在光学探头与卫星接口得到稳定的热调节条件下完成.
4 结论
本文系统介绍了星敏感器的误差分类、低频误差定义、误差产生原因及其测试标定方法.以法国SODERN公司开发的SED36星敏感器为例,介绍了低频误差的控制方法与效果.一般情况下,典型星敏感器采取相应的解决措施后,低频误差可控制在0.8″以内.
[1] ECSS Secretariat.ECSS-E-ST-60-20C:stars sensors terminology and performance specification[S].Noordwijk:ESA,2008.
[2] TAKANORI I,HIROKI H,Takeshi Y,et al.Precision attitude determination for the advanced land observing satellite(ALOS):design,verification,and on-orbit calibration[R].AIAA 2007-6817,2000.
[3] WINKLER S,WIEDERMANN G,GOCKEL W.Highaccuracy on-board attitude estimation for the GMES Sentinel-2 satellite:concept,design,and first results[R].AIAA 2008-7482,2008.
[4] SCHMIDT U.ASTRO APS-the next generation Hi-Rel star tracker based on active pixel sensor technology[R].AIAA 2005-5925,2005.
[5] BLARRE L,PERRIMON N.New multiple head star sensor(HYDRA)description and development status:a highly autonomous,accurate and very robust system to pave the way for gyroless very accurate AOCS systems[R].AIAA 2005-5932,2005.
[6] SCHMIDT U,ELSTNER C,MICHEL K.ASTRO15 star tracker flight experience and further improvements towards the ASTRO APS star tracker[R].AIAA 2008-6649,2008.
[7] DAVID H,THOMAS S,KEVIN A,et al.Star tracker scan mode capability for the new horizons mission[J].Acta Astronautica,2006,59:956-965.
[8] BLARRE L,OUAKNINE J,ODDOS-MARCEL L.High accuracy Sodern star trackers:recent improvements proposed on SED36 and HYDRA star trackers[R].AIAA 2006-6046,2006.
[9] BLARRE L,PIOT D,JACOB P,et al.SED16 autonomous star sensor product line in flight results,new developments and improvements in progress[R].AIAA 2005-5930,2005.
[10] POCHARD M,BLARRE L,VILAIRE D,et al.New inflight results of SED16 autonomous star sensor[R].IAC-03-A.5.01,2003.
[11] BLARRE L,VILAIRE D,PIRIOU V,et al.Qualification of the autonomous SED16 star tracker[R].IAF-00-A.2.09,2000.
