一种晶圆自动光学检测系统的混合路径规划算法
2022-09-17肖钰坤张文涛王秀秀
肖钰坤,张文涛,杜 浩,王秀秀
(桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004)
近年来,自动光学检测(Automated Optical Inspection,AOI)系统已广泛应用于晶圆的表面质量检测中。AOI利用机器视觉模拟人类视觉对晶圆表面进行图像采集和检测,最终获取清晰的缺陷图像,供给工艺工程师进行缺陷分析。由于缺陷在晶圆上分布不规律,并且AOI系统受CCD相机视场大小和测量精度的限制,对晶圆表面的缺陷进行图像采集时,需要通过移动相机或运动台对缺陷进行多次拍照,完成图像采集工作,因此需要对拍照位置和移动的顺序进行合理规划。拍照位置的规划问题是以相机视场和晶圆表面缺陷为操作对象的视场分配问题,移动顺序问题即视场分配后的路径优化问题。在传统的工艺中多采用顺序视场分配法和顺序取像法来进行视场分配和路径优化,其优点是算法收敛速度快、操作逻辑简单,其缺点是取像次数多、移动路径长,导致AOI系统的工作效率偏低。东苗提出采用迭代自组织数据分析法(IteractiveSelforganizing Data Anaylsis,ISODATA)进行视场分配的思路,针对路径优化问题可以使用解决经典的路径规划旅行商问题(Traveling Salesman Problem,TSP)的算法进行求解。为提高AOI系统的检测效率,以最短的时间完成图像采集工作,本文结合AOI检测流程高效实时性的特点,在迭代自组织分析数据法的基础上,提出一种实时动态分配视场的算法。在视场分配后的路径优化问题上,本文选择采用了路径优化算法中收敛速度快的局部择优算法。实验结果证明,本文提出的混合算法规划的路径长度比传统算法规划的减少了50%左右,能有效提高AOI系统的工作效率。
1 AOI系统设计
1.1 AOI系统的结构
AOI系统的硬件部分主要由运动台模块、光学模块组成。运动台模块由运动轴和承载台组成,光学模块由2个CCD面阵相机、光源、镜头和轴组成。本系统使用大理石底座作为运动台的基座,运动台的运动轴采用轴堆叠方式,搭载承载台组件实现承载和移动晶圆进行水平方向移动;光学模块可实现在不同倍率镜头下获得晶圆的清晰图像,大理石横梁安装在运动台底座上部,横梁垂向轴,轴上搭载了光学模块进行向运动,完成晶圆检测过程中的光学对准等动作,其中的2个CCD相机则分别应用在检测和复检流程的图像采集工作中,其结构如图1所示。
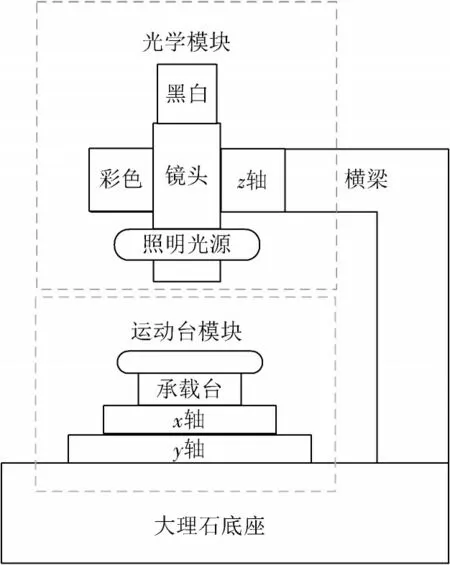
图1 系统结构图
1.2 AOI系统工作流程
AOI系统的主要工作流程有缺陷检测流程、数据处理流程和缺陷复检流程,在经过缺陷复检后便可以得到清晰的缺陷图片。缺陷检测流程需要对整个晶圆表面进行图像采集;数据处理流程根据采集到的图片进行缺陷分析,并完成视场分配和路径规划工作;缺陷复检流程则根据规划后的结果进行图像采集。在缺陷检测流程中,需要多次控制运动台和光学模块,使用黑白相机进行图像采集,完成对整个晶圆表面的取像。图像采集的同时数据处理流程将已采集到的图像进行分析,分析出图像中的缺陷大小和位置信息并记录,同时根据缺陷的信息进行视场分配,直到检测流程的取像工作完毕,所有的缺陷都被分配到了视场中,使用路径优划算法进行优化。在缺陷复检流程中,根据优化后的结果再次控制运动台和光学模块,使用彩色相机进行图像采集,获取到所有缺陷的形貌特征,其工作流程图如图2所示。
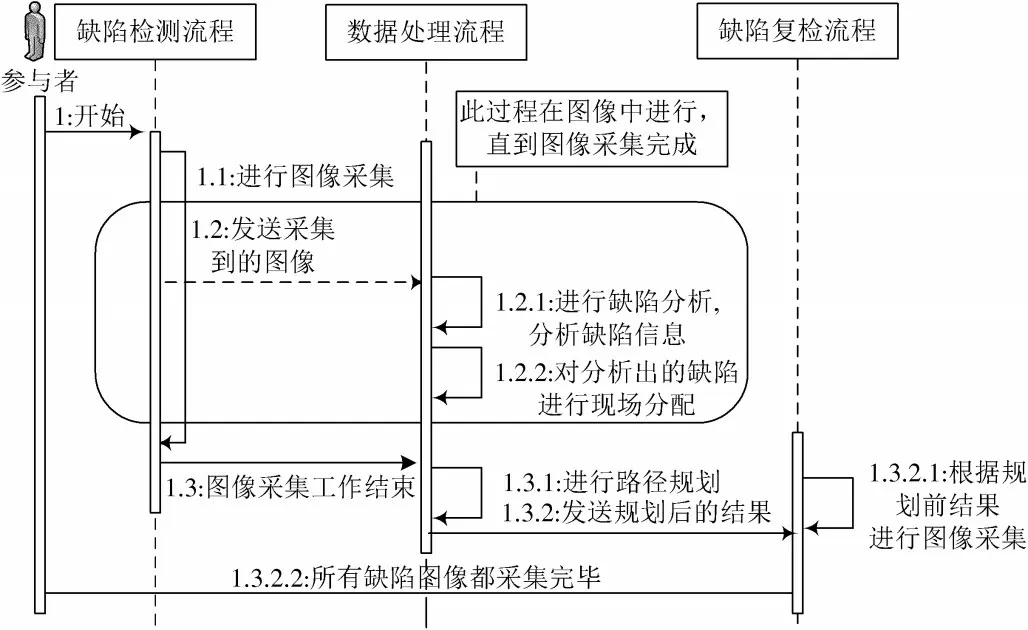
图2 工作流程图
2 混合路径规划算法设计
2.1 视场分配
视场分配是AOI的路径规划的关键步骤,在进行视场分配时需要满足以下要求:实时接收缺陷的同时进行视场分配;每个视场尽可能覆盖更多的缺陷;所有缺陷都被分配到了视场中;视场的个数要尽可能的少。
传统工艺中使用顺序分配法进行视场分配,其工作原理是先为首个缺陷分配一个视场,分配视场时以缺陷中心为视场中心,如图3所示。
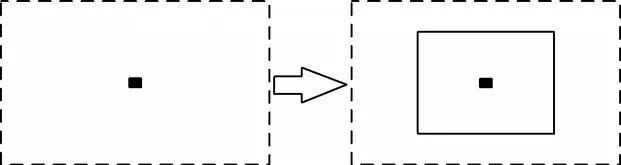
图3 分配视场
分析出新的缺陷后,根据缺陷的大小和位置,判断该缺陷是否可以添加到在已分配的视场中,如图4所示。
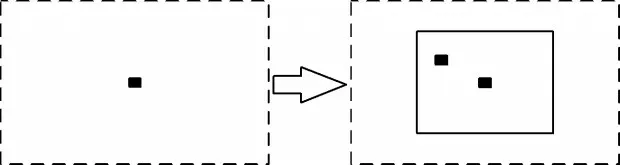
图4 添加到视场
若新的缺陷无法添加到视场中,则以缺陷中心为视场中心再分配一个视场,如图5所示。
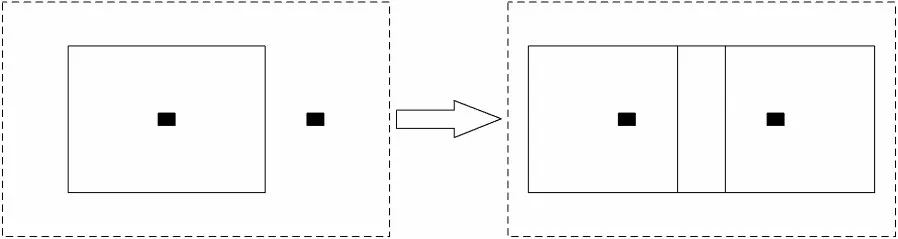
图5 再分配视场
传统算法操作简单、收敛速度快,但是算法固定了视场的位置,若缺陷距离视场很近也无法被该视场覆盖,只能新开再分配一个视场来覆盖该缺陷,最终导致视场数量过多、工作效率偏低。迭代自组织分析数据法是解决典型聚类问题的最常用的一种算法。该算法在计算的过程中不断地对聚类进行合并和分割,而且移动聚类的中心来自我调整,直至相邻两次迭代的聚类中心不再变化为止,该方法的适应性和求解的效率得到显著提高。东苗基于迭代自组织分析数据法提出以视场网格为操作对象,通过缩小网格的大小进行网格合并,改变了网格的中心位置,形成新的网格,最终达到减少视场数量的目的;但是由于应用场景不同,该方法无法满足实时分配视场的要求。为解决传统算法因视场固定而导致工作效率偏低的问题,本文基于迭代自组织分析数据法提出了一种实时动态分配视场的算法,根据视场大小和视场所含的缺陷大小提出了增益视场的概念,利用增益视场扩大了视场的有效范围,使视场能够覆盖更多的缺陷。在实时接收新缺陷的同时,不断调整增益视场的大小和中心位置即改变了聚类的大小和中心位置,其主要的操作流程如图6所示。
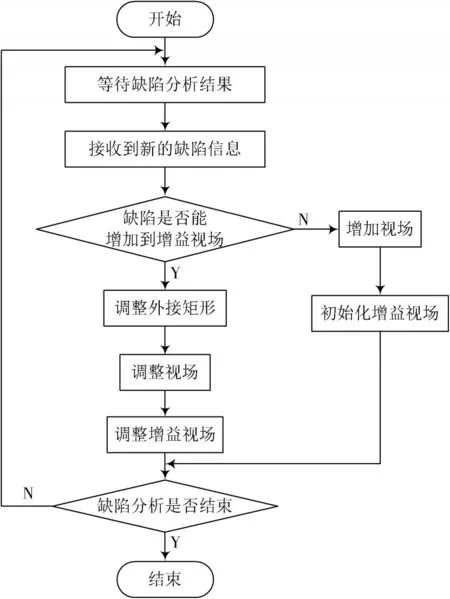
图6 算法操作流程
1)算法在缺陷检测流程开始时便已启动,在实时拍照的同时进行缺陷分析,每当有新的缺陷被分析出就会触发一次视场分配。
2)判断缺陷是否可以添加到增益视场中,根据缺陷的大小和位置信息,判断缺陷能否添加到增益视场中。
3)若缺陷无法增加到增益视场中,为缺陷增加一个视场,计算出初始增益视场。
4)若缺陷可以增加到增益视场中,将缺陷添加到增益视场中,移动视场的中心位置,使视场能够覆盖新的缺陷,重新计算增益视场。
5)视场位置调整后,判断缺陷分析流程是否结束,若未结束等待新的图像分析结果;若已结束则记录视场分配结果,退出视场分配算法。
2.2 增加视场
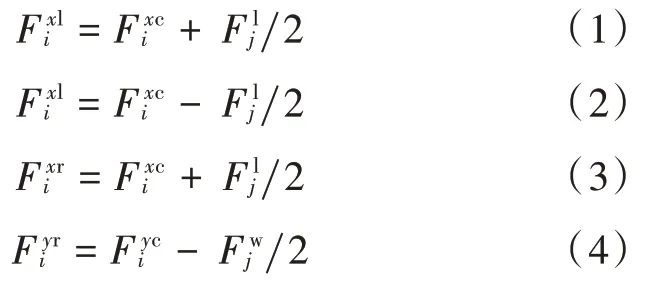
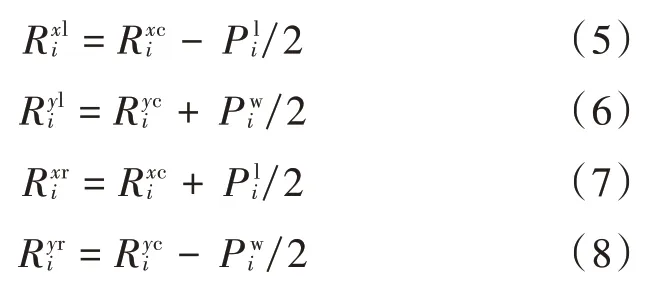
当首个缺陷被分析出或缺陷无法增加到增益视场时,以缺陷中心坐标为视场中心坐标增加一个视场。视场的左上角坐标用(F,F)来表示,右下角的坐标用(F,F)来表示,视场的中心坐标用(F,F)来表示,视场的长度用F表示,视场的宽度用F表示,则可以计算出视场的坐标信息:
计算增益视场,增益视场的概念是视场根据其内部的所有缺陷的物理大小所计算出的最大可移动范围,由视场上下左右4个方向最大移动范围组成的网格便是增益视场,如图7所示。
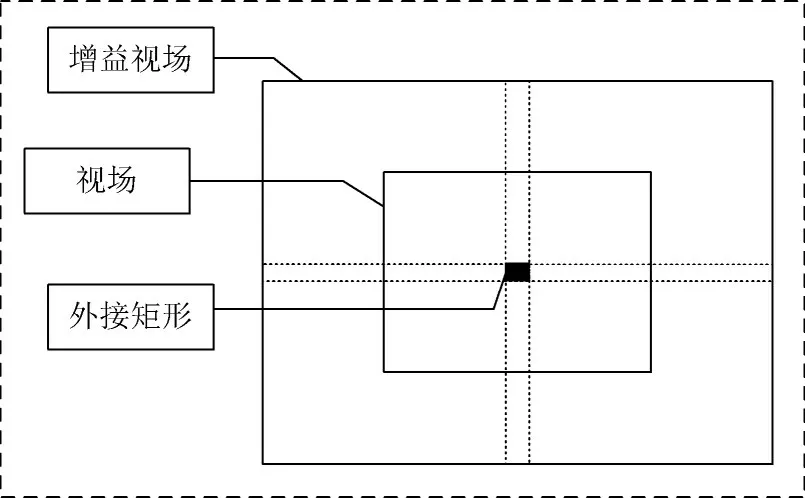
图7 计算增益视场
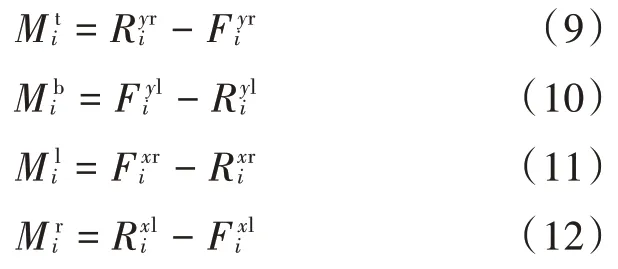
首先计算出由缺陷组成的外接矩形,P表示缺陷的长度,P表示缺陷的宽度。(R,R)表示外接矩形的中心点坐标,(R,R)表示矩形的左上角坐标,(R,R)表示矩形右下角的坐标,则可以计算出:
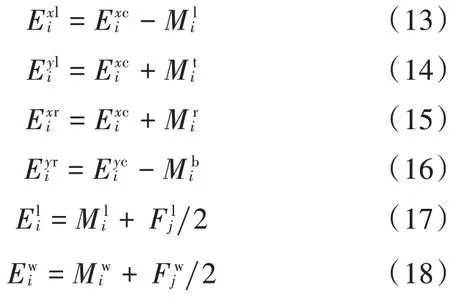
之后,根据视场和外接矩形计算出视场可移动范围。视场向上下左右可移动的范围分别由,,和来表示,则可以计算出:
(E,E)表示增益视场的中心坐标,(E,E)和(E,E)表示增益视场的左上角和右下角坐标,和表示增益视场的长度和宽度,根据以上信息可以得出:
2.3 添加到增益视场
判断是否可以添加到增益视场中,需先判断缺陷的中心坐标位置是否在增益视场内。缺陷中心的坐标由(P,P)表示,能添加到视场的第一个条件是:
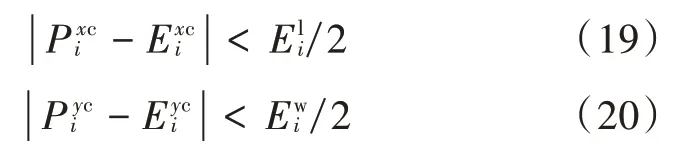
之后,根据缺陷的大小判断增益视场能否完全覆盖该缺陷,能添加到视场的第二个条件是:
同时满足以上条件则可以添加到增益视场中,如图8所示。
图8 添加到增益视场
调整外接矩形,首先需要根据新缺陷P和视场内部缺陷矩形R计算出新外接矩形R的信息,用R来表示由缺陷P组成的外接矩形,则新的外接矩形R的坐标信息可以计算出:
调整视场,通过调整视场的中心位置,视场能覆盖缺陷P,移动视场中心到由所有缺陷组成的新矩形的中心,如图9所示。
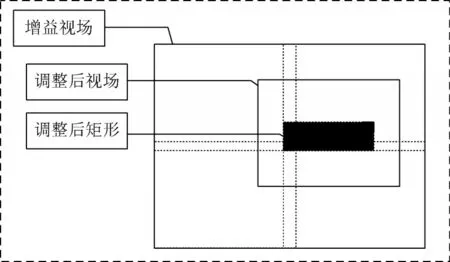
图9 调整视场
调整增益视场,使用上述计算出的矩形R代入式(9)~式(18)便可计算出调整后增益视场E的大小和坐标信息,调整后如图10所示。
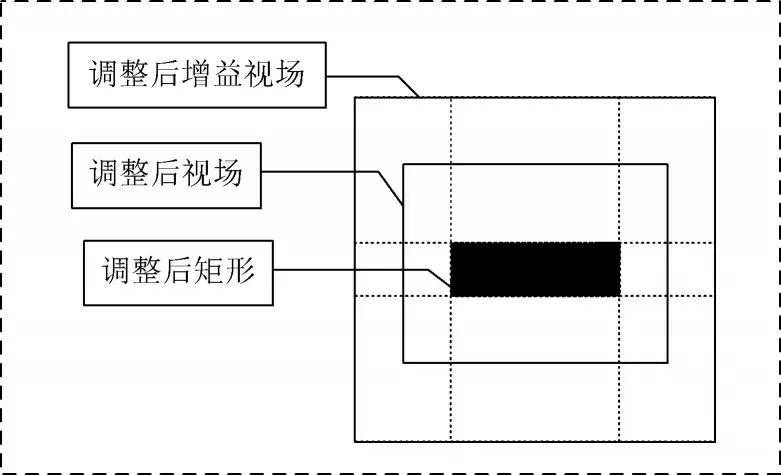
图10 调整增益视场
按照上述操作进行视场分配,不再固定视场的位置,在实时接收到新的缺陷信息的同时,不断调整增益视场和视场去覆盖更多的缺陷,尽可能少地开辟新的视场,减少视场分配的数量,直到缺陷分析流程结束,不会再有新的缺陷。所有的缺陷都被覆盖在了视场后,退出算法。
2.4 路径优化
在视场分配后就生成了一系列的视场,缺陷复检时就会控制运动台移动到不同的视场进行图像采集。为提高检测效率,需要对移动的路径进行合理的优化,在最短的时间内完成图像采集工作。传统工艺的路径优化采用了顺序取像法,按照视场生成到次序对视场进行排序,这种方法操作简单、收敛速度快,但是会导致移动路径过长,最终导致检测的效率偏低。本文将各个视场中心点作为路径节点,采用局部择优算法进行路径优化。该算法会从当前路径节点的临近节点中选择一个最优解当作下一个当前路径节点,该算法易于实现并且收敛速度快,完全满足AOI系统的高效实时性。该算法的基本步骤如下所示。
步骤1:将第一个生成的视场中心点定为起始路径节点。
步骤2:将邻近的视场中心点作为邻近节点,从邻近节点中选择一个距离最近的节点作为新的起始点,并记录移动路径。
步骤3:重复步骤2,直到所有的视场都被加入到移动路径中。
步骤4:输出优化后的路经。
路径优化示意图如图11所示。
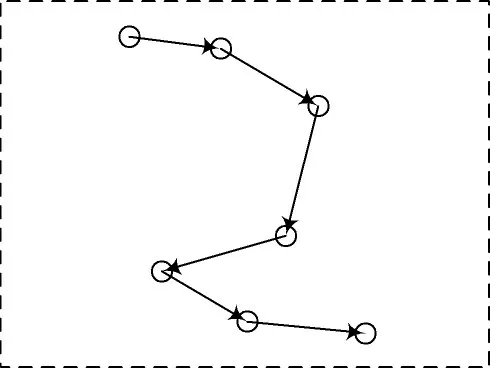
图11 路径优化示意图
3 实验结果分析
本实验的实验环境为CPU:Intel Core i3⁃10100 3.60 GHz,内存8 GB DDR3L,操作系统:Windows 10。相机的视场的大小是14 mm×18 mm,使用直径为200 mm的晶圆测试片。为验证本算法的有效性,本文使用C#代码编写了本文路径规划算法的程序,使用AOI晶圆检测机台进行实验,并对测试算法的效果进行简要的分析。首先使用传统算法进行视场分配,然后使用基于迭代自组织分析数据法改进的算法进行视场分配作对比。实验对1 636个待测对象进行视场分配,使用传统算法的视场分配后的视场数量是153个,使用本文算法视场分配后的视场数量是107个,本文算法相较于传统算法视场的数量减少了30%左右,在视场分配结果上有明显的提升,效果图如图12所示。
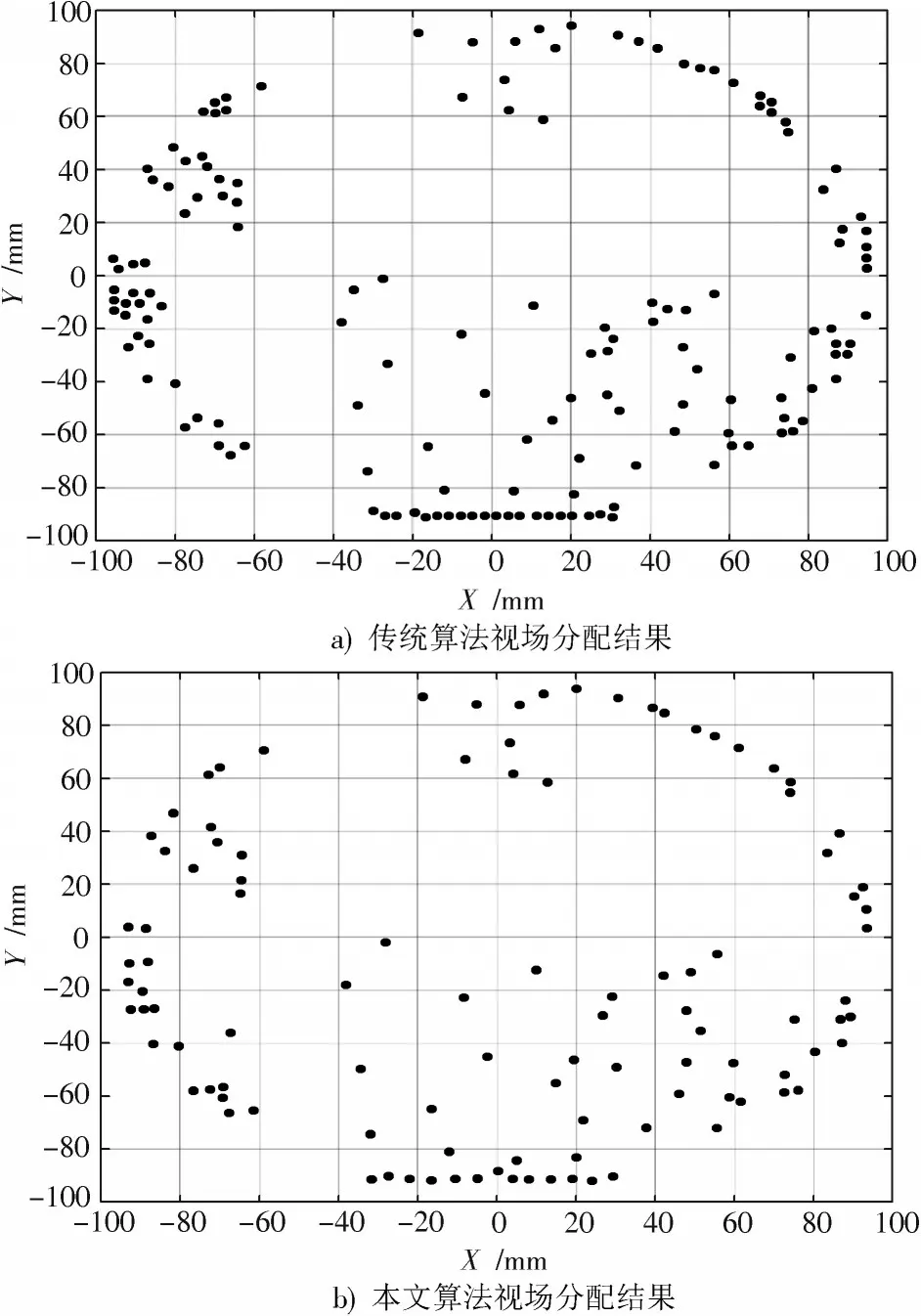
图12 视场分配效果图
在确认视场数量最少的情况下,采用传统算法进行路径优化后的路径长度为6 455 mm,采用本文算法进行路径优化后的路径长度为4 172 mm。在视场数目相等的条件下,本文算法相较于传统算法路径总长度减少了35%左右,效果图如图13所示。
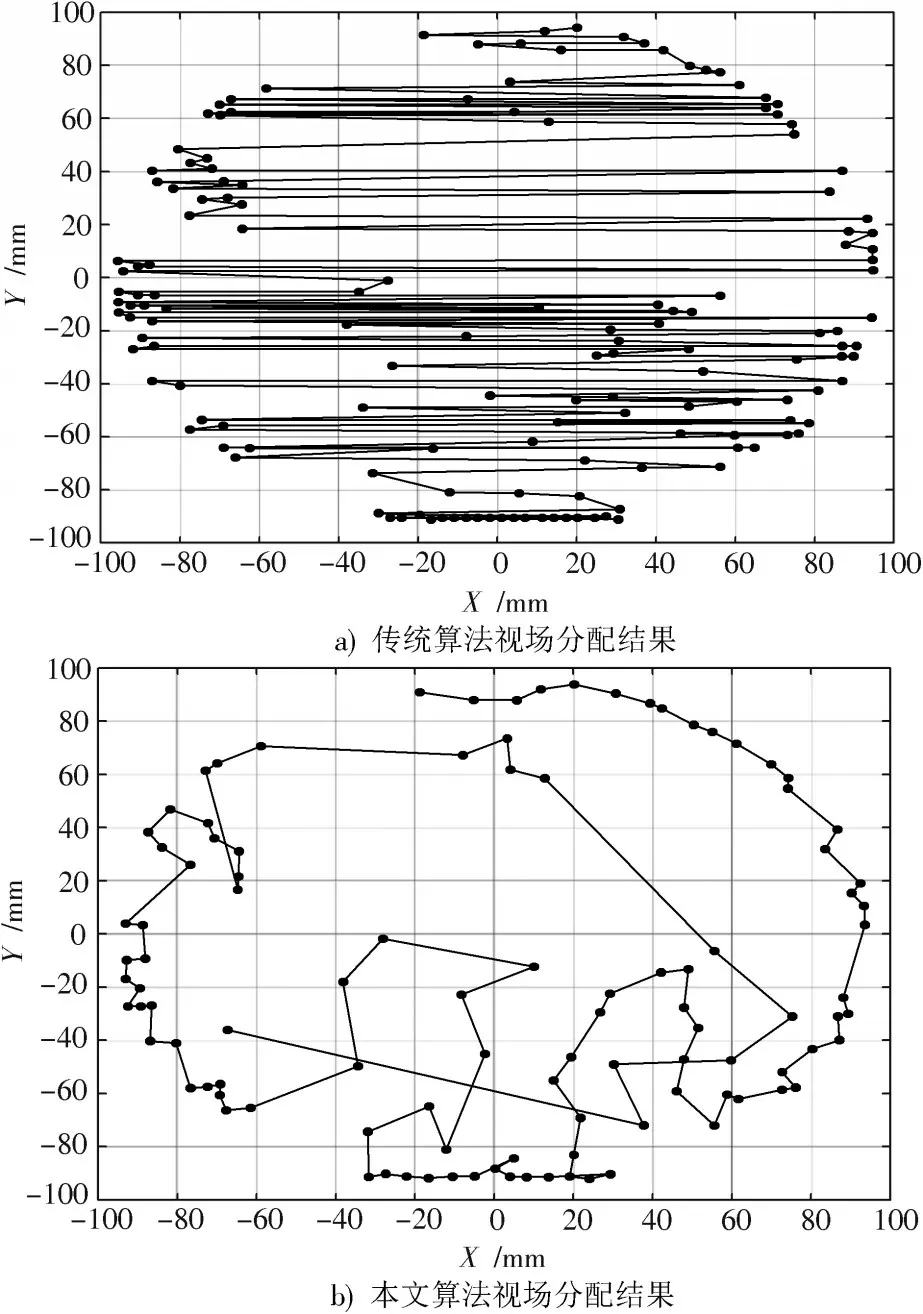
图13 路径优化效果图
为进一步验证本算法的性能,使用了3片直径为200 mm和3片直径为300 mm的晶圆测试片进行实验。实验中记录了使用传统算法和本文算法在视场分配后的视场数量和最终路径规划后的路径长度,如表1所示。表1对传统算法和本文算法在视场数量和路径长度两个方面进行比较,从中可以看出本文算法在视场分配数量上与传统算法相比有明显的减少。经过本文算法综合优化后,路径长度较于传统算法减少了50%左右。最终可以得出结论:本文算法所得路径质量更高,更加符合工业现场效率要求,能有效提高AOI的工作效率。
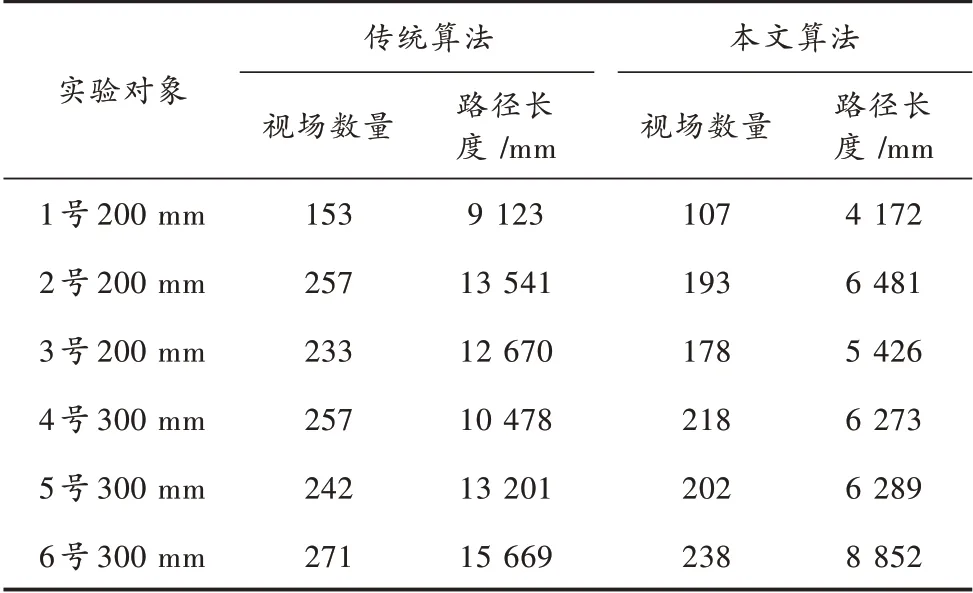
表1 混合路径规划算法和传统算法结果对比
4 结 论
本文提出一种求解晶圆自动光学检测系统路径规划问题的混合算法,结合AOI系统高效实时性的特点改进了迭代自组织数据分析法算法,在视场分配时提出了增益视场的概念,通过不断调整视场和增益视场覆盖更多的缺陷,有效地减少了视场的数量。视场分配结束后采用收敛速度快的局部择优算法进行路径优化,缩短了路径长度,实现了AOI晶圆检测系统路径规划的综合优化。最后,使用不同规格的晶圆实验证明,本文所采用的混合路径规划算法在求解性能上均优于传统算法,验证了本文算法的有效性。
