一种基于大力矩飞轮的敏捷卫星路径规划的姿态机动控制方法
2014-04-17周伟敏祖立业朱庆华
周伟敏,祖立业,朱庆华
(1.上海航天技术研究院,上海 201109;2.国防科技大学航天工程学院,长沙 410073;3.上海航天控制技术研究所,上海 200233)
O 引言
随着卫星遥感技术应用的不断深入,对遥感数据实时性要求的不断提高,在较短时间内获得一个或多个地面目标的高分辨率观测数据需要卫星平台具备较强的姿态机动能力.美国和欧洲目前敏捷姿态机动控制技术已广泛应用于高分辨率对地遥感卫星,对于控制系统而言,必须首先解决以下两个问题:一是作为卫星快速机动控制的执行机构,不仅需要具备较大输出力矩的能力,同时需要有较高的控制精度和良好的振动特性,从而保证卫星姿态控制的稳定度;二是姿态快速机动及快速稳定控制能力,这是敏捷卫星提高遥感时间分辨率的必要条件[1-2].
由于控制力矩陀螺具有显著的力矩放大特性而得到了广泛的研究.目前,由于受到制造业的约束,控制力矩陀螺在控制精度、机械振动等多方面还存在一定的问题[3],而动量飞轮或反作用飞轮则因为其高可靠性还始终得到航天专家的重视.
Lee等[4]用动量轮和喷气控制相结合研究了挠性卫星姿态快速机动问题,Steyn等[5]提出了使用反作用飞轮的近最小时间特征轴旋转姿态机动方案,两种方案都是基于反馈控制,具有显著的应用价值.在机动规划方面,Bilimoria等[6]于1993年首次研究了刚体航天器的时间最优姿态机动控制问题,基于数值优化给出了多个时间最优姿态机动结果.Fleming[7]深入研究了实时最优姿态机动策略,提出了基于优化软件实时获取卫星机动姿态的方案,不过其闭环性能尚有待验证.
本文针对高精度对地遥感敏捷卫星的姿态控制要求,一方面通过设计一种基于路径规划的卫星姿态快速机动控制方法,解决姿态快速机动、快速稳定控制问题;另一方面针对中小型对地遥感敏捷平台,提出利用大力矩飞轮作为执行机构的方法,并给出所研制的大力矩飞轮工程样机主要指标,通过转速闭环实现飞轮高精度角动量控制的同时,使飞轮具备较好的过零特性,使卫星稳态控制期间飞轮可以工作在较低转速,避免飞轮动静不平衡对卫星稳定度的影响.相比于控制力矩陀螺作为执行机构,大力矩飞轮可以通过更小的技术代价实现高稳定度的敏捷机动控制.
1 敏捷卫星姿态控制模型
敏捷卫星动力学方程包括卫星主体动力学方程和帆板振动动力学方程,由大力矩飞轮作为执行机提供控制力矩,如下所示

式中,Is∈R3×3为卫星转动惯量矩阵,ωs∈R3×1是卫星本体相对惯性坐标系的转动角速度在卫星本体系投影,hw∈R3×1为飞轮的角动量,Td∈R3×1是作用在星体的外干扰力矩在卫星本体坐系的投影,η为卫星挠性附件的前n阶模态坐标矢量在卫星本体系下的投影,ε和Ω分别是挠性附件振动阻尼比矩阵和频率矩阵,Fs为挠性附件和星体的耦合系数矩阵;具有ωs×形式的矩阵为斜对称矩阵.
采用欧拉轴/角方式描述卫星姿态运动,由刚体复合运动关系,可得
式中,ωo为期望角速度在控制基准坐标系(可以为轨道坐标系或其他坐标系)的投影,Cbr为卫星本体相对于控制基准的坐标转换矩阵,ωbr为卫星本体相对于控制基准的角速度在本体系投影,ωri为控制基准坐标系相对惯性坐标系的牵连角速度.
采用1-2-3转序欧拉轴/角方式将式(2)展开

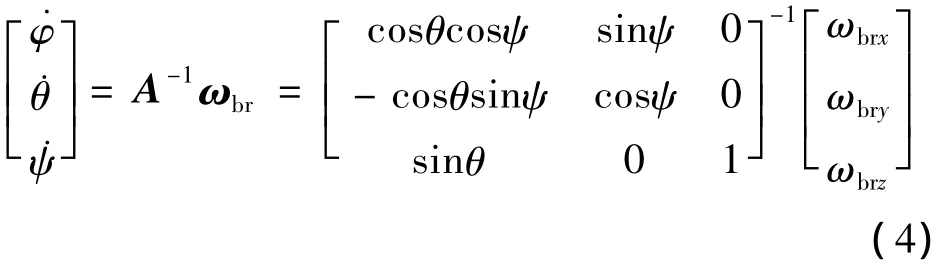
式中 ωbr=[ωbrxωbryωbrz]T,即本体相对于基准的姿态角速度在3个本体轴上的分量.
2 基于路径规划姿态快速机动控制算法
2.1 机动路径规划
影响卫星姿态机动速度的主要因素之一是卫星姿态机动过程的稳定时间,在实际工程应用中,考虑卫星挠性附件谐振以及卫星作为被控对象的模型不确定性,控制系统的带宽不能过大,在一定带宽约束条件下,姿态稳定的过程也受到制约.但通过合理的路径规划方式,可以在控制系统带宽约束范围内,兼顾系统响应能力前提下控制卫星姿态按照既定路径稳定,这样不仅可以较大程度减少卫星姿态稳定时间,同时具有工程使用、鲁棒性强的特点.
路径规划姿态机动控制的核心是如何选择机动的路径,由于卫星快速姿态机动的最终目标是卫星姿态机动到既定目标时姿态角速度收敛为零,因此,本文采用“加速+减速+稳定”的方式作为规划姿态机动路径,加速、减速和稳定3个阶段的姿态角和姿态角速度路径如图1所示.
如图1所示的路径规划方式,卫星姿态机动期间首先利用执行机构最大输出力矩加速、减速,加速和减速期间的指令姿态角、指令姿态角速度、控制时间分别如下:

图1 姿态角和姿态角速度规划路径曲线Fig.1 Path planning curve of attitude angle and attitude angular velocity


2.2 动力学不确定性建模及机动路径在轨修正方式
为确保姿态按上述规划路径机动,还需考虑动力学模型不确定性、加减速不对称性等,以下主要针对动力学的不确定性进行建模,为数学仿真提供被控对象,以便地面验证在轨修正方式的正确性.由于卫星在轨期间转动惯量会发生一定程度的变化,而且这种现象比较普遍,因此,以惯量摄动为例考虑不确定性进行动力学建模.
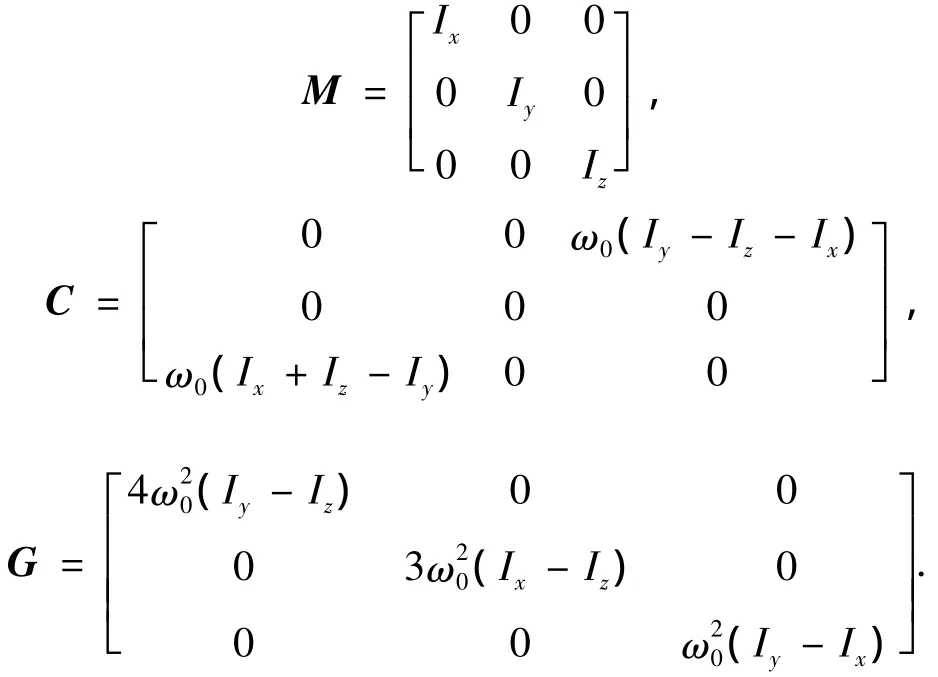
取状态向量为q=[ φ θ ψ]T,又另d=[TdxTdyTdz]T为干扰力矩,在此处控制器设计时可将外干扰力矩和挠性耦合力矩视为广义干扰,u= [TcxTcyTcz]T为控制力矩输入,则卫星姿态动力学方程可以转化为如下的二阶系统:

式中,N1=N2=I3×3,
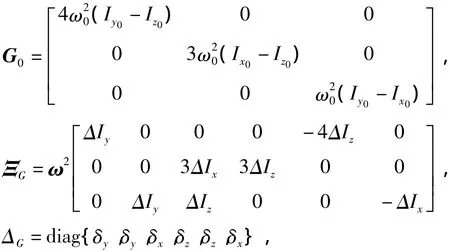
引入惯量的摄动,令

则式(8)中的系数矩阵变为

式中,ΠM=I3×3,ΞM=diag{ΔIx,ΔIy,ΔIz},ΔM=diag{δx,δy,δz},ΔC=diag{δx,δx,δz,δz,δy,δy},


可得

由式(11)可见,通过变换,将转动惯量的不确性转化成为系统的扰动输入
在基于路径规划的姿态机动过程中,分为加速、减速、稳定3个阶段,由于加减速过程的不对称性、测量环节引入的误差,使得加速和减速过程与规划值存在偏差,如果仅仅采用图1所示的姿态机动开环规划方案,必然存在姿态控制偏差.
为了削弱系统不确定性等对姿态机动性能的影响,本文分别研究了闭环控制和引入修正角度两种方法,即通过反馈卫星姿态角确定控制力矩.为使姿态机动加速、减速、稳定之间的衔接更平滑,以减少姿态稳定时间,提出在加速段到减速段转折点处引入修正角度、修正时间的方法.本文算例给出了应用闭环控制和修正角度两种方法的仿真结果.
修正角度和修正时间可以等价转化,其基本原理一致.下面给出修正角度的数学描述.
姿态机动过程中,加速段到减速段转折点对应的修正角度为

式中,X为机动路径变化长度,Y为修正角度,如图2所示,A0、A1、A2、A3为拟合系数.
如果没有在加减速转折点引入修正角度,则转折点为机动路径中点,如果引入正的修正角度,则相当于加速路径小于减速路径(提前减速),如果引入负的修正角度,则相当于加速路径大于减速路径(滞后减速).
以具体算例说明修正步骤,修正步骤:
1)初始姿态角为0°,机动目标角度为50°,机动路径长度X=50°,调整Y值进行数学仿真,使机动效果与图1所示的理想机动过程接近,机动到位后角度误差控制在 0.05°,稳定度控制在 0.001(°)/s 内,对对于本文后续给出的仿真结果,可得Y=1.06°;
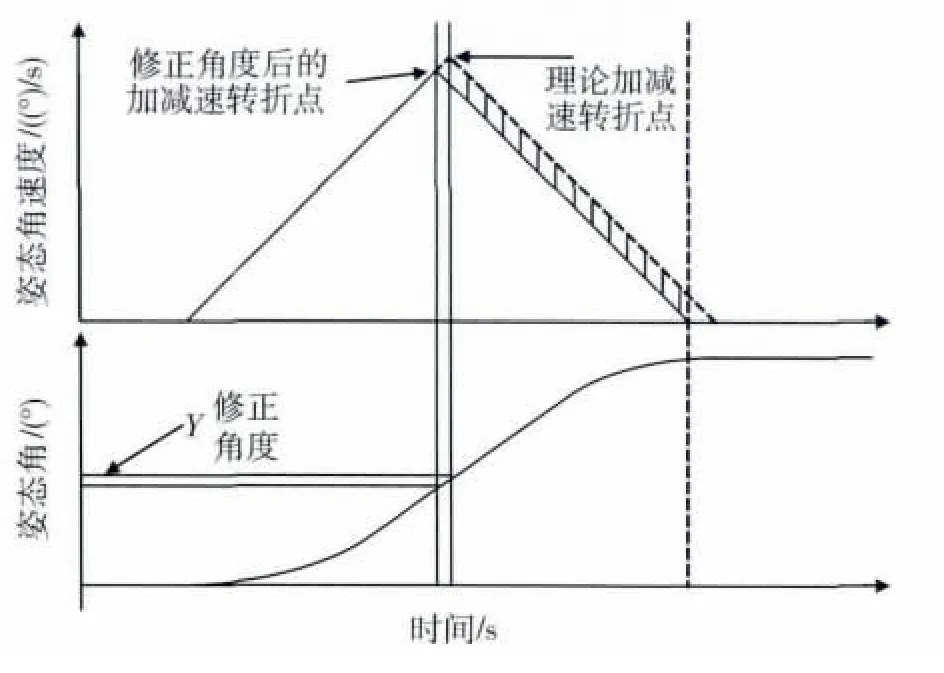
图2 修正角度示意图Fig.2 Schematic chart of angle correction
2)同理得到 X=40°、Y=0.64°,X=30°、Y=0.49°,X=20°、Y=0.44°等一系列组合;
3)利用上述4组参数拟合得到函数:

2.3 大力矩飞轮
除了规划路径提供姿态快速机动和稳定的控制算法外,控制力矩ux的大小直接制约着加速和减速段所需要的时间,为了实现敏捷平台姿态机动和高稳定度控制,利用大力矩飞轮不仅可以提供较大的机动力矩,同时,利用转速反馈控制保证飞轮较高的力矩输出精度和较好的过零特性,使得稳态控制期间飞轮可以工作在较低转速,从而避免了飞轮动静不平衡对卫星稳定度的影响.因此,利用大力矩飞轮作为敏捷平台姿态控制执行机构,可以利用较小的技术代价实现快速机动和高稳定控制.大力矩飞轮的主要指标如表1所示.
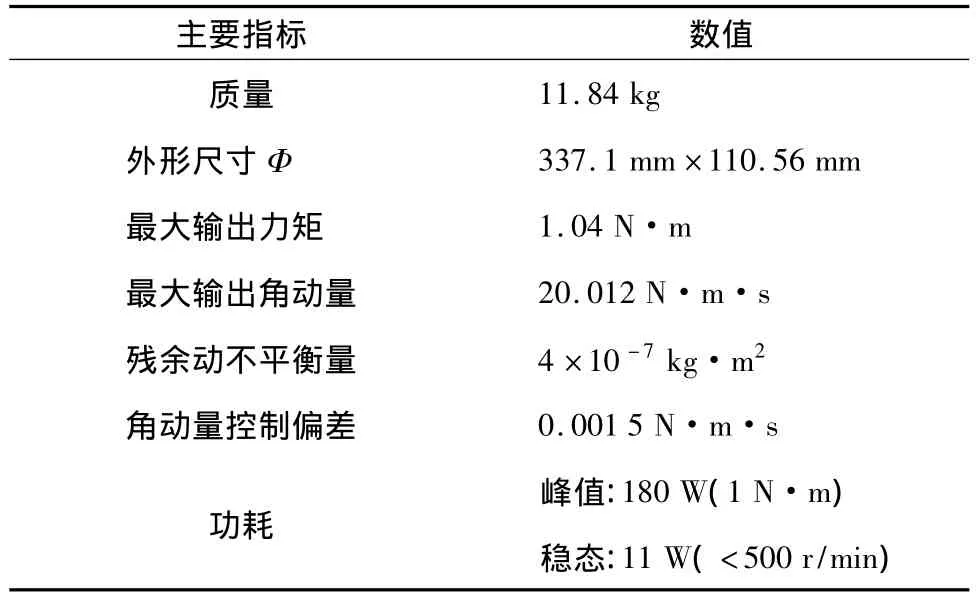
表1 大力矩飞轮主要指标Tab.1 Main indicators of large torque flywheel
3 试验验证
设卫星的转动惯量为[760400600]kg·m2,大力矩飞轮采用正交安装方式,卫星各体轴安装2台大力矩飞轮.以滚动通道机动为例,两台大力矩飞轮力矩输出限幅1.8 N·m(考虑工程应用,为转动惯量误差留有设计余量),应用本文提出的方法,给出机动目标角度为50°的数学仿真结果,如图3~图5所示.

图3 姿态角曲线及放大图Fig.3 Time histories of attitude angle and its enlarged view
本文对两种方法进行了机动效果比较,“未修正闭环方法”和“已修正闭环方法”均为本文提出的基于路径规划的快速机动闭环控制方法,其区别在于是否引入修正角度;“开环闭环方法”为机动过程采用开环的飞轮加减速方式,机动到位后切换为闭环控制方式.
数学仿真表明,50°姿态机动及稳定所需时间为47.6 s(稳定度达到 0.001(°)/s)),以本例参数计算姿态机动50°所需的理论机动时间为37 s,与图4仿真的机动及稳定时间之差为10.6 s.在机动过程中,开环闭环衔接点误差较大,导致过渡过程较长;其他两种方法均为闭环控制方法.从图5中可以看出,以机动到位角度误差小于0.1°、稳定度小于0.001(°)/s的指标比较3种方法,应用“已修正闭环方法”进行50°姿态机动及稳定所用的时间最短.从图5放大图可以看出:应用“已修正闭环方法”比其他两种方法少用30余秒.

图4 姿态角速度及其放大曲线Fig.4 Time histories of angular velocity and its enlarged view
由此可以看出:本文提出的基于路径规划的卫星姿态快速机动控制方法有一定的优势,可以适应卫星控制系统的响应局限性,而且可以缩短采用开环闭环方法实现姿态机动及稳定的时间.
4 结论
根据遥感卫星的需求,研究解决卫星姿态快速机动、快速稳定技术依然是卫星控制系统的重要任务,以此为目标提出一种基于路径规划的卫星姿态快速机动控制方法,并进行了数学仿真验证,仿真结果表明了方法的可行性和应用价值.

图5 滚动轴姿态机动性能对比Fig.5 Comparison of attitude maneuver performance along roll axis
[1] 屠善澄.卫星姿态动力学与控制[M].北京:宇航出版社,2001:187:228.
[2] 章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,1998:270-278.
[3] LAPPAS V J,STEYN W H,UNDERWOOD C I.Attitude control for small satellite using control moment gyros[J].Acta Astronautica,2002,51(1):101-111.
[4] LEE B H,LEE B H.Time optimal attitude maneuver strategies for the agile spacecraft with reaction Wheels and thrusters[J].Journal of Mechanical Science and Technology,2005,19(9):1695-1705.
[5] STEYN W H.Near-minimum-time eigenaxis rotation maneuvers using reaction wheels[J].Journal of Guidance,Control,and Dynamics.1995,18(5):1184-1189.
[6] BILIMORIA K D,WIE B.Time-optimal three-axis reorientation of a rigid spacecraft[J].Journal of Guidance,Control,and Dynamics,1993,16(3):446-452.
[7] FLEMING A.Real-time optimal slew maneuver design and control[D].Astronautical Engineer Thesis,Naval Postgraduate School.2004.
[8] 黄圳奎.航天器姿态动力学[M].北京:国防科技大学出版社,1997:167-211.