一种无线定位非视距误差消除算法研究
2012-06-06邹强
邹 强
(中国民航飞行学院航空工程学院,四川广汉 618307)
0 引言
随着数字电视广播等技术的发展,以及对移动定位和基于位置的服务需求增多,无线定位技术在近些年日益受到关注。无线定位技术在紧急治疗、紧急报警、犯罪侦查、位置敏感付费以及导航和智能交通系统等诸多方面都有着广泛的应用。尤其是在美国联邦通信委员会(federal communications commission,FCC)提出了 E-911[1]对于定位精度的要求(误差低于100 m的情况要占到67%,低于300 m的情况要占到95%)以后,越来越多的旨在提高定位精度的算法被提出来。
总的来说,无线定位方法[2]主要有:信号到达角度(angle of arrival,AOA)、信号到达时间(time of arrival,TOA)、信号到达时间差(time difference of arrival,TDOA)、信号到达能量测量以及这些方法的混合使用。但是,在实际无线传播环境中,不可避免地会受到散射物质和障碍物的影响,从而传播信号会发生反射、折射、衍射等现象,这就使得在接收端测量得到的时间数据和角度信息产生了偏差,严重影响了定位精度,称之为非视距(non line of sight,NLOS)误差。正是由于NLOS误差以及测量误差,使实测距离比真实值要大得多,传统的算法只考虑热噪声的算法就不再实用。本文正是基于TOA方法,研究了一种消除NLOS误差的基于分布式多天线算法,该算法主要分为2步:①估计出散射体的位置信息;②将散射体看作“虚拟基站”,利用TOA方法测量出移动台的方位。仿真表明,新算法在定位精度上比传统的Chan算法和泰勒算法显著提高。
1 散射体模型分析研究
文献[3-4]提出,根据移动台所处环境和附近地形的不同,可以模拟出移动台周围散射体的分布模型,利用该模型可以推导出TOA的概率密度函数,从而得到TOA的统计特性。本文算法也需要根据这个环境的统计特性来产生散射体的分布情况。DOS(disk of scatterers model)模型和ROS(ring of scatterersmodel)模型都假设所有的散射都来自于移动台周围,散射区为一个半径为R的圆,以移动台为中心,且R<D(D是基站与移动台之间的视距),所有散射点都均匀分布在这个圆中(DOS模型,见图1)或者都均匀分布在这个圆环上(ROS模型,见图2)。而截断高斯散射体(clipped gaussian scatterersmodel,CGS)模型(见图3),则将高斯分布截断,满足截断高斯分布概率密度函数的散射体形成一个以Rc为半径、以移动台为中心的圆域,其中,σg为该高斯分布的均方根。
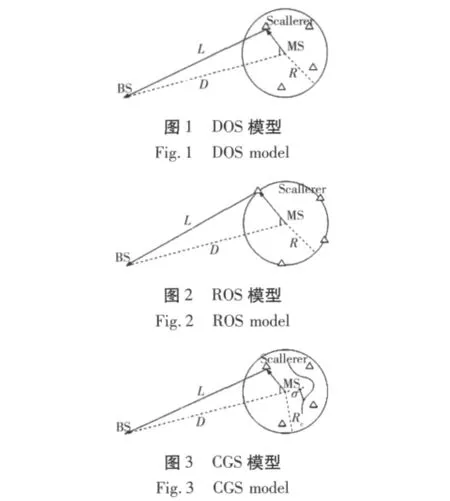
本文算法将借助散射体模型来仿真移动台附近的散射体分布情况。
2 基于分布式多天线的NLOS误差消除算法
文献[5]提出一种消除NLOS[5]误差的新算法。借助TOA技术,分步计算出散射体的方位以及散射体与移动台的距离。
在算法中,一个基站对应控制着一个天线组发射信号,如图4所示,这个天线组包含5个特殊放置的天线A1,A2,A3,A4,A5,其坐标分别为 (x1,y1),(x2,y2),(x3,y3),(x4,y4),(x5,y5),这 5个天线形成一个交叉垂直轴,其中,A1,A2,A3放置在同一水平线上,间距为d,A4,A2,A5放置在同一竖直线上,间距也为d,则如下关系式成立


图4 算法中基站与天线关系Fig.4 Algorithm relationship between base stations and antennas
2.1 散射体坐标求取
设移动台的坐标为 (x,y),散射体的坐标为(xs,ys),假设在NLOS情况下没有视距信号的传播,而且 TOA 法测得天线Ai(i=1,2,3,4,5)端信号非视距传播距离为li,再设Ai到散射体的距离为ai,散射体到移动台的距离为s,测量噪声为ni,则li=ai+s+ni。用 ΔLi,j表示用TOA 法测得的天线Ai、Aj的信号传播距离li,lj之差,即ΔLi,j=ai-aj+ni-nj。
考虑水平放置的天线A1,A2,A3,可以根据TDOA算法列写2个独立的等式分别为

如果认为测量误差相比于非视距的影响可暂时忽略不计,则上(2)-(3)式可以简化为
结合方程(4),(5)以及(1)式,可以计算出散射体的横坐标xs为
类似的考虑竖直放置的天线A4,A2,A5,可以计算出散射体的纵坐标ys为
由(6)式和(7)式就得到了散射体的具体坐标(xs,ys),这样利用任何一个天线的TOA距离减去它与散射体之间的距离,就得到了散射体与移动台的距离,如

2.2 移动台位置求取及定位算法
2.1 节利用一组天线求得了一个散射体的坐标和该散射体到移动台的距离。现将该散射体看作一个“虚拟基站”,假设信号从散射体发出,那么根据TOA定位原理,只要至少3个以上的“虚拟基站”就可以定位出移动台的二维位置信息。采取2.1节的方法,用3个基站求取3个“虚拟基站”——散射体的坐标,来完成本算法的定位功能。
设3个散射体的坐标分别为 (xs1,ys1),(xs2,ys2),(xs3,ys3),它们到移动台的距离分别为s1,s2,s3,可以列写出如下3个方程
由(9)-(11)式可以得到如下2个独立的等式
化成矩阵形式,求得移动台的坐标为
这就得到了移动台的具体位置,完成定位。
3 算法仿真与结果分析
在本文算法仿真中,基站坐标分别设为BS1(0,0),BS2(4 000,4 000),BS3(8 000,0),将每个基站对应的天线组的最中心的天线(A2)放置在上面3点处,天线组中各横竖相邻的天线之间相隔30 m。移动台初始位置设置在(1 000,1 000)处,它以一定的速度在这3个基站范围内移动。采样间隔为0.2 s,采样2 000点。散射体模型采用DOS模型,散射半径为200 m,(最大非视距误差为400 m)。测量噪声ni假设服从均值为0,标准差为50 m的高斯分布。将本文算法和 Chan 算法[1,6]、泰勒算法[7],通过跟踪移动台的运动轨迹和误差的累积分布函数来比较其性能。仿真结果如图5-6所示。
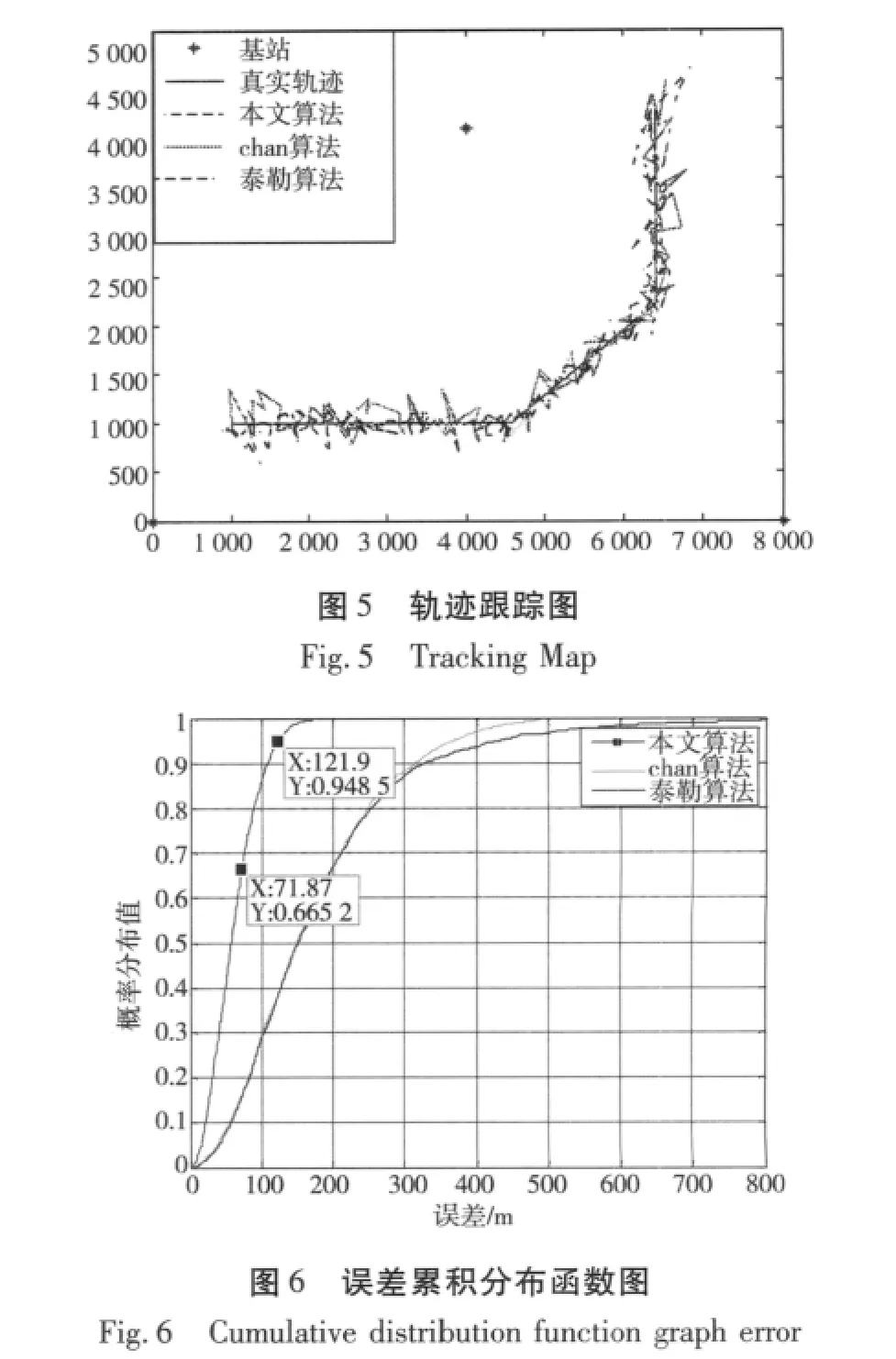
从算法仿真结果可以看出,2种传统定位方法性能相差无几,而本文算法的性能明显优于它们。图5中,横坐标表示基站跟踪区域中x轴的坐标区域,纵坐标表示基站跟踪区域中y轴的坐标区域,两者结合反应的是物体运动的二维坐标区域。图5反映了新算法有很好的跟踪性能,其轨迹在真实轨迹附近波动较小。由图6的标注可以看到,在67%的情况下误差精度约为72m,在95%的情况下定位精度能达到120m左右,远远超出了E-911的定位精度要求。
4 结束语
本文运用分布式多天线消除非视距误差的基本原理和思路,相当于将非视距定位转化为2次视距定位过程,不仅大大提高了定位精度,还能较精准地估计出散射体的位置信息,有助于非视距定位的进一步研究分析。
[1]Federal Communications Commission(FCC).Revision of the Commissions Rules to Insure Compatibility with Enhanced 911 Emergency calling Systems[R].Washington,DC:Technical Report,RM-8143,1996.
[2] 范平志,邓平,刘林.蜂窝网无线定位[M].北京:电子工业出版社,2002.
FAN Ping-zhi,DENG Ping,LIU Lin.Cellular netswireless location[M].Beijing:Publishing house ofelectronics industry,2002.
[3] MECHITOVW K,AGHA G,NAGAYAMA T.High-frequency distributed sensing for structuremonitoring[C]//In Proc of the First International Conference on Networked Sensing Systems.Tokyo,Japan:[s.n.],2004:355-356.
[4] Al-JAZZAR S, CAFFERY J, HEUNG-RYPOL You.Scattering-Model-Based Methods for TOA Location in NLOS Environments[J].IEEE Vehicular Technology Trans,2007,56(2):583-593.
[5] XU N,RANGWALA S,CHINTALAPUDI K,et al.A Wireless Sensov Network for Structural Monitoring[C]//In Proceedings of the ACM Conference on Embedded Networked Sensor Systems.Baltimore,MD,USA:[s.n.],2004:411-415.
[6] 张倩,谢显中.多用户MIMO中基于部分信道状态信息预编码的稳健性研究[J].重庆邮电大学学报:自然科学版,2009,29(21):31-33.
ZHANG Qian, XIE Xian-zhong. Multi-user MIMO channel state information based on part of the research advance coding decision.in [J].The Journal of Chongqing University of Posts and Telecommunication:Natural Science Edition,2009,29(21):31-33.
[7]DU Juan, KANG Gui-xia, ZHANG Ping. Simplified transmitter design for MIMO systems with channel uncertainty[J].The Journal of China Universities of Posts and Telecommunicate,2006,16(2):20-23.
[8] HE Tian,HUANG Cheng-du,BLUM BM,etal.Rangefree Localization Schemes in Large Scale Sensor Networks[C]//Proceedings of the 9th Annual International Conference on Mobile Computing and Networking,MOBICOM'2003.New York(NY,USA):ACM Press,2003:81-95.