四桥臂逆变器SPWM和SVPWM的归一化研究
2010-06-06王晓刚谢运祥黄少辉帅定新
王晓刚, 谢运祥, 黄少辉, 帅定新
(1.华南理工大学电力学院,广东 广州 510640;2.广州大学机械与电气工程学院,广东 广州 510006)
0 引言
在三相四线制供配电系统中,常用的逆变器拓扑有带中点形成变压器的三相三桥臂结构、分裂电容的三相三桥臂结构和三相四桥臂结构[1-6]。第一种结构的变压器随着输出基波电压频率的降低,体积和重量也随之增加,使装置笨重成本增加;第二种结构相当于三个半桥逆变器的组合,具有半桥逆变器电压利用率不高、两个电容需要平衡控制等缺点;四桥臂逆变器得到越来越广泛的认可,其第四桥臂(n桥臂)为三相不平衡负载或非线性负载提供零序分量的释放通路,且可采用多种方法实现第四桥臂和前三桥臂的解耦控制,控制较为简单和灵活。
文献[7]研究了分裂电容结构的三相三桥臂逆变器常规正弦脉宽调制(sinusoidal pulse width modulation,SPWM)与空间矢量脉宽调制(space vector pulse width modulation,SVPWM)的关系,发现两者完全等效,但SPWM更容易实现,SVPWM失去了优势。与三桥臂类似,四桥臂逆变器也有SPWM和SVPWM两种基本的调制策略,但由于第四桥臂的出现,脉宽调制的机理与普通三桥臂逆变器的二维(2D)调制空间和分裂电容结构的三维(3D)空间均大有不同,需要重新加以分析。许多文献研究了相应的3D -SPWM 和3D -SVPWM 等调制策略[8-13],以不同的方式使逆变器输出零序分量。另外,常规的3D-SVPWM需要坐标变换,但四桥臂逆变器的有些控制策略是在a-b-c坐标下设计的[3-4],坐标变换显得较为繁琐。
本文针对逆变器的数字化控制,详细地分析和比较了3D-SPWM和3D-SVPWM的数字化实现过程,推导出了一种无需坐标变换的快速3D-SVPWM算法,直接利用a-b-c坐标系变量表示的参考电压,省去了坐标变换,节约了计算时间;而传统的3DSPWM方法用于四桥臂逆变器仍有电压利用率不及3D-SVPWM的缺点,但经过改进,3D-SPWM可获得与3D-SVPWM完全相同的4个比较值;这意味着两种方法在本质上是归一化的,两者使逆变器输出电压频谱和电压利用率均完全相同。进一步分析表明二者都基于逆变器最优跟踪控制方程的解。但是,简化后的3D-SVPWM算法更简单,易于编程实现,尤其适合于在a-b-c坐标下设计的控制器,是一种值得推广的四桥臂PWM方法。
1 四桥臂3D-SVPWM的数字实现
1.1 四桥臂逆变器方程和三维空间矢量
图1为四桥臂逆变器的主电路。

图1 四桥臂逆变器的主电路Fig.1 The main circuit of four-leg inverter
根据图1,以直流母线中点O为参考点,定义Sa,Sb,Sc,Sn∈{-1,1}为 4 个桥臂的开关函数,可以列出方程

开关状态(SaSbScSn)共有16种,对应着16个电压矢量,包括14个非零矢量和2个零矢量,它们在αβγ三维空间的分布如图2所示,相邻的3个电压矢量可构成一个四面体,一共24个,分别记为A1~A24,在以下分析中,构成任何四面体的标准矢量均用 u1,u2,u3表示,零矢量用 u0和u15表示。
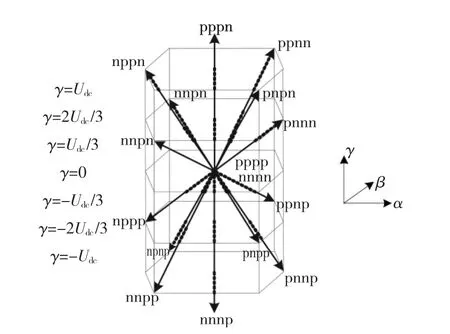
图2 三维空间中的四桥臂逆变器电压矢量Fig.2 Voltage vectors of four-leg inverter in three-dimensional space
与2D-SVPWM相比,调制空间变成了以六边形为底,2Udc/3为高的六棱柱(pppn和nnnp长度为Udc,穿出六棱柱),所以逆变器输出三相平衡电压时,调制空间为半径为Udc/的内切圆,输出的三相平衡电压幅值与三桥臂的2D-SVPWM相同,电压利用率高。
1.2 3D-SVPWM的数字实现
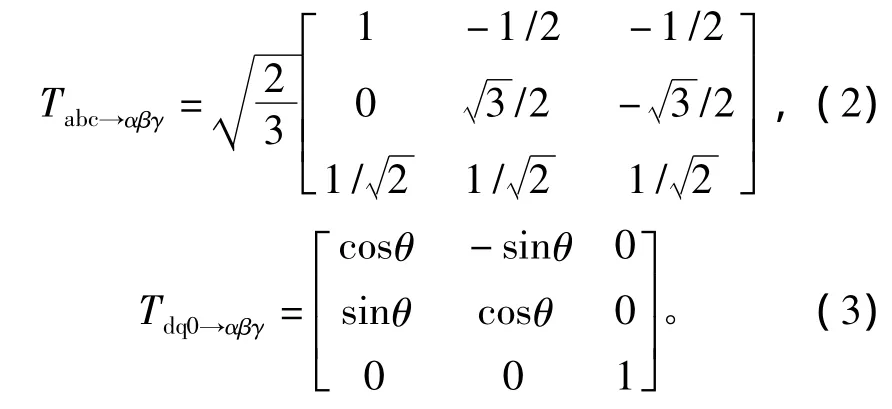
常用DSP的PWM发生器连续增/减计数模式产生载波,载波周期为Ts,定时器的计数频率为fc,定时器计数的周期值P=Tsfc/2。每个Ts开始前用调制波的大小来装载比较寄存器,用ca,cb,cc,cn表示并简称为比较值。逆变器经各种控制算法得到参考电压,分为abc、αβγ、dq0坐标系表示的三种情况,按照传统的空间矢量算法,abc和dq0坐标下的参考电压均应变换到αβγ坐标下方可进行空间矢量算法的运算,相应的变换矩阵为
限于篇幅,仅分析参考电压矢量Uref在αβ平面的投影位于第I扇区的情况,满足条件的四面体有A5,A6,A17,A18,表1 列出了 Uref位于以上4 个四面体的判据和非零合成矢量。

表1 各四面体的判据及其非零合成矢量Table 1 The criterions and non-zero space vectors of each tetrahedron
当Uref位于A5内时,合成 Uref的标准矢量为u1(pnnn),u2(pnnp),u3(ppnp)。根据伏秒平衡的合成原则计算5个矢量的作用时间为

将标准矢量代入式(4),并在αβγ三个方向进行分解,共3个方程,解出3个未知数t1,t2,t3,一个周期Ts内的剩余时间由t0和t15补充。A5内的作用时间为
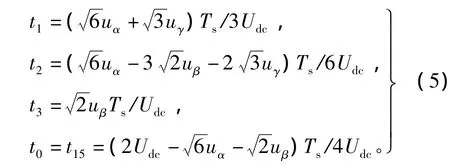
根据转换矩阵(2),可将式(5)变换为

每个周期应装载的比较值为

式中 K=P/2Udc。表2列出了 A5,A6,A17,A18中的矢量作用时间,表3列出了每个周期装载的比较值。

表2 各四面体内的矢量作用时间Tabel 2 The effective time of vectors in each tetrahedron
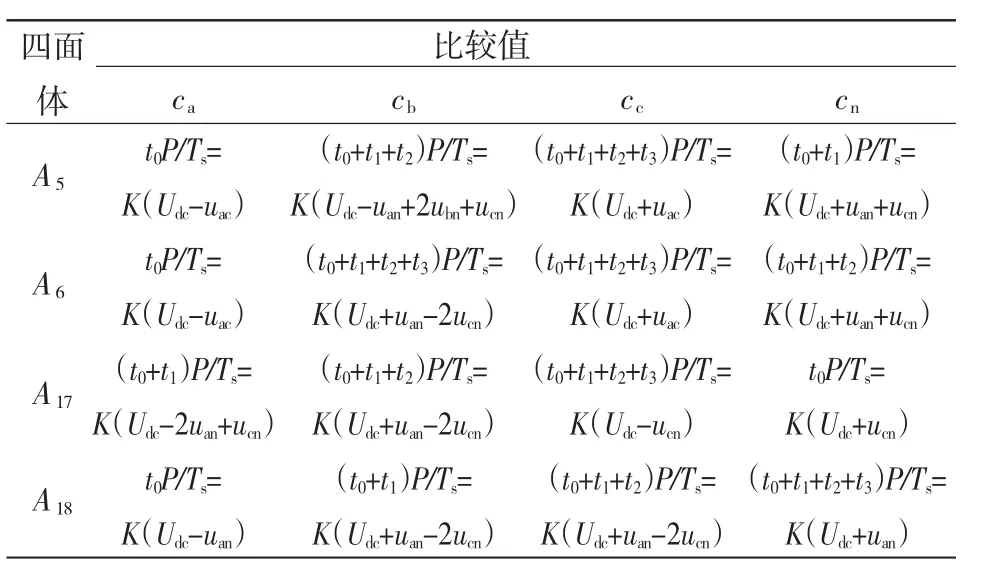
表3 各四面体内每个周期的比较值Tabel 3 The comparative values in each tetrahedron
由表2和表3可见比较值的获得可以直接利用abc坐标下的参考电压,无需变换至αβγ坐标下,这对于在abc坐标下设计的控制器,如预测电流控制等,在很大程度上减少了计算次数,节约了DSP的资源。
2 四桥臂3D-SPWM的数字实现
2.1 常规3D-SPWM的数字实现
采用常规的双极性SPWM,利用式(1)将得到的参考电压 uan,ubn,ucn变为uao,ubo,uco,uno,即4 个桥臂输出的电压信号,其中前3个电压包含正负序分量,uno仅包含零序分量,这4个电压作为4个调制波与同一三角载波进行比较。每个周期装载的比较值为
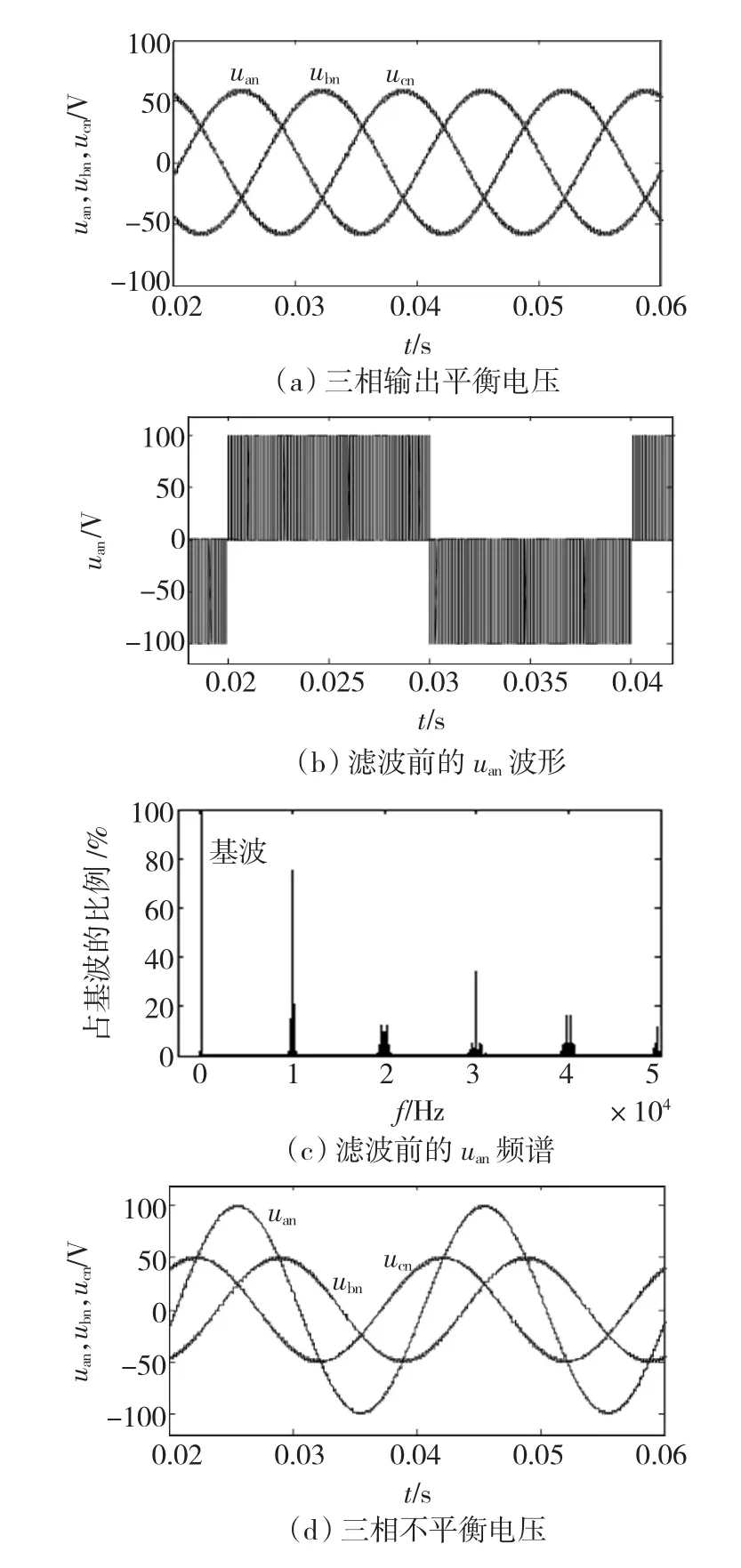
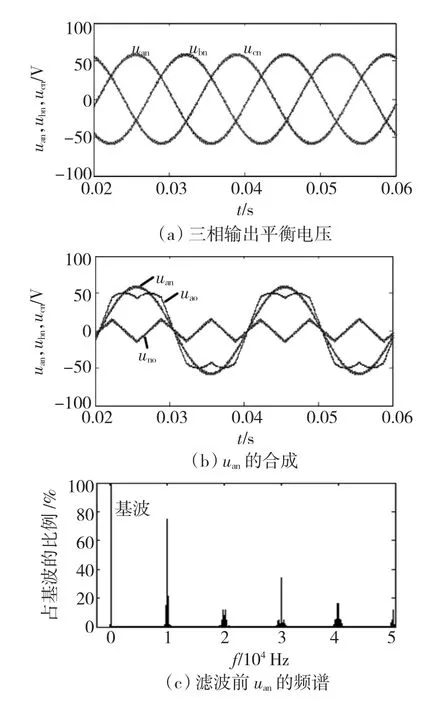
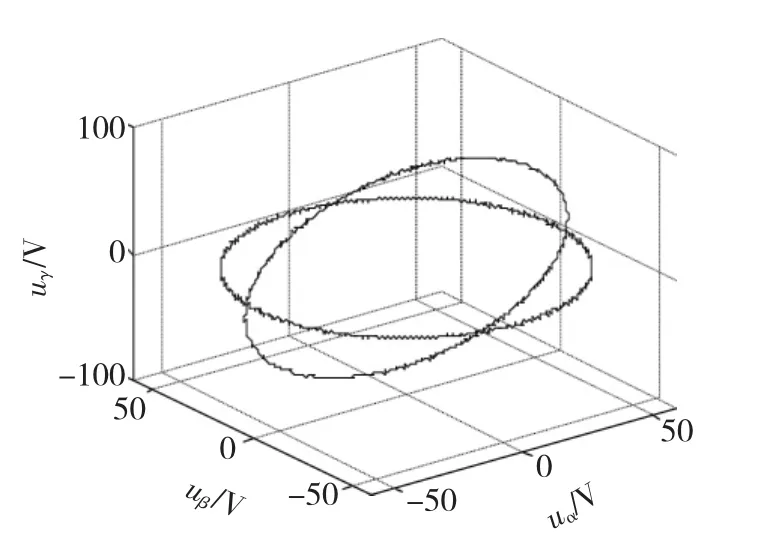
式中K=P/2Udc。在三相电压uan,ubn,ucn平衡时,uno=0,cn=P/2,ca=cb=cc 常规SPWM用于四桥臂逆变器仍具备不足是由于未能充分利用第四桥臂,实际上,第四桥臂大大增强了控制的灵活性,考虑将uno选为[14] 其中 Vmin=min(uan,ubn,ucn),Vmax=max(uan,ubn,ucn),分别表示取三相参考电压的瞬时最小值和最大值,‘mid’表示取中位数。 此时,比较值的形式与式(8)相同,但其中的4个桥臂输出电压发生了变化。为了和3D-SVPWM的分析相对应,也考虑Uref位于四面体A5中,经过分析,有 前三桥臂的调制波为 将式(10)、(11)代入式(8),得到改进后的比较值为 式(12)与式(7)完全相同,同理,分别计算Uref位于其余23个四面体的比较值,均可得到SPWM的比较值与SVPWM比较值相同的结论。 经过以上分析,可以发现对于四桥臂逆变器,对3D-SPWM进行改进,可得到与3D-SVPWM完全相同的效果,即两者在满足一定条件下是归一化的。两种PWM方法均直接利用abc坐标的参考电压,无须坐标转换,编程简单;但改进的3D-SPWM要进行式(9)的计算,相比而言,3D-SVPWM概念更清晰,更容易编程实现,是四桥臂逆变器首选的 PWM方法。 当Uref位于四面体A5内时,归一化算法在一个周期内的装载值如图3所示,此时cc>cn>cb>ca。 图3 Uref位于A5时的装载值Fig.3 Loading values when Urefwithin A5 逆变器的开关状态共有16种,用ki(i=0,…,15)表示,每一种开关状态对应的控制电压向量U(i)=[UA(i),UB(i),UC(i)]T可由式(1)得到。设在数字控制的一个周期Ts中,开关状态ki对应的时间为ti,则逆变器的控制方程为 式中:U=[U(0),U(1),…,U(15)],t=[t0,t1,…,t15]。 以uab≥0,ubc≥0,uca<0 且 uan>0,ubn<0,ucn<0的情况为例(即Uref位于A5中),此时满足条件的开关状态量只能从 k1(pnnn)、k2(pnnp)、k3(ppnp)中选择,才能保证对参考电压的最优跟踪,从时域方程式(1)可得 上式也是逆变器此周期内的最优跟踪控制方程。解得 在Ts内剩余的时间仍由u0和u15补充,作用时间与式(6)相同。可见,快速3D-SVPWM和改进的3DSPWM在本质上均为逆变器控制方程的解,换句话说,它们是产生PWM信号的一种最佳方案,这也解释了为什么它们可获得最大的直流电压利用率。 在Matlab 7.1环境下进行了仿真研究,采用SIMULINK与s函数相结合的方式。逆变器直流侧电压Udc=100 V,输出滤波电感5mH,电容10μF,三相负载均为10 Ω电阻,开关频率为10kHz。 首先对快速3D-SVPWM仿真。给定三相平衡、幅值为57.74 V(1 00/V)的参考电压,滤波后输出波形如图4(a)所示,此时电压利用率达到最大;滤波前a相电压及其频谱如图4(b)和4(c)所示。参考电压为三相平衡、幅值50 V+幅值50 V的零序分量时,滤波后的三相不平衡电压如图4(d)所示,此时a相达到最大输出(幅值100 V)。 图4 3D-SVPWM的仿真结果Fig.4 Simulation results of 3D-SVPWM 然后对改进的3D-SPWM进行仿真。依然给定幅值为57.74 V的三相平衡参考电压,滤波后三相电压如图5(a)所示,其幅值由于滤波器压降略低于给定值,但已经证明其输出波形和电压利用率与采用3D-SVPWM时完全相同;图5(b)为a相电压uan及其两个分量 uao和 uno,uan是由 uao、uno与三角载波比较得到的电压相减并滤波得到的。滤波前uan的频谱如图5(c)所示,它与图4(c)也完全相同。 图6给出了在αβγ坐标下输出电压平衡与不平衡时的轨迹,平衡时轨迹为与αβ平面平行的圆,不平衡时为倾斜的椭圆。 图5 3D-SPWM的仿真结果Fig.5 Simulation results of 3D-SPWM 图6 采用归一化算法时输出电压的矢量轨迹Fig.6 Output trajectories when using unified algorithms 在一台四桥臂实验样机上对文中的3D-SVPWM和3D-SPWM方法进行了实验。主开关器件采用STW7NB80 MOS管,控制芯片为TMS320F2812,编写了归一化的两种开环PWM发生程序,开关频率为10kHz。前三桥臂使用事件管理器EVA的定时器,第四桥臂使用EVB的定时器,两个定时器保持同步。滤波前和滤波后输出电压uan和ubn如图7所示,两种PWM的输出完全等效。滤波前的uan及其频谱如图8所示,由于死区等原因,频谱与仿真稍有不同。另外,两种算法均直接利用abc坐标的参考电压,DSP计算时间很短。经测定,从得到参考电压到输出PWM信号仅需约2 μs,占一个周期(100 μs)的比例很小,无需FPGA等附加可编程器件。 图8 滤波前的uan及其频谱Fig.8 uanbefore filtering and its spectrum 1)对3D-SVPWM的数字化进行了分析,结果表明算法完全没有必要在αβγ坐标下完成,仅利用abc坐标的参考电压就可以简单快速地完成,尤其适合于在abc坐标下设计的逆变器控制器。3DSVPWM继承了2D-SVPWM的优点,具有概念清晰,电压利用率高等优点。 2)常规的3D-SPWM与3D-SVPWM并不等效,电压利用率低;但经过改进,3D-SPWM与3D-SVPWM的效果完全一致,即二者是归一化的。 3)归一化算法的优点可从物理本质上得到解释。 4)相比于3D-SPWM,3D-SVPWM概念更清晰,编程更容易,应为四桥臂逆变器首选的PWM方法。 [1]王慧贞,丁勇,张方华,等.开关点预置的四桥臂三相逆变器[J]. 中国电机工程学报,2008,28(3):73-76.WANG Huizhen,DING Yong,ZHANG Fanghua,et al.Four-leg three-phase inverter based on switching-node preset[J].Proceedings of the CSEE,2008,28(3):73-76. [2]乐健,姜齐荣,韩英铎.基于统一数学模型的三相四线并联有源电力滤波器的性能分析[J].中国电机工程学报,2007,27(7):109-114.LE Jian,JIANG Qirong,HAN Yingduo.Performance analysis of three-phase four-wire shunt apf based on the unified mathematic model[J].Proceedings of the CSEE,2007,27(7):109 -114. [3]孙驰,鲁军勇,马伟明.一种新的三相四桥臂逆变器控制方法.电工技术学报,2007,22(2):57 -63.SUN Chi,LU Junyong,MA Weiming.A novel control method for three-phase four-leg inverter[J].Transactions of China Electrotechnical Society,2007,22(2):57-63. [4]陈宏志,刘秀翀.四桥臂三相逆变器的解耦控制[J].中国电机工程学报,2007,27(19):74 -79.CHEN Hongzhi,LIU Xiuchong.Decoupling control of three-phase four-legged inverter[J].Proceedings of the CSEE,2007,27(19):74-79. [5]刘秀翀,张化光,陈宏志.四桥臂逆变器中第四桥臂的控制策略[J]. 中国电机工程学报,2007,27(33):87-92.LIU Xiuchong,ZHANG Huaguang,CHEN Hongzhi.Control strategy of fourth leg in four-leg inverter[J].Proceedings of the CSEE,2007,27(33):87-92. [6]周林,蒋建文,周雒维,等.基于单周控制的三相四线制有源电力滤波器[J].中国电机工程学报,2003,23(3):85-88,125.ZHOU Lin,JIANG Jianwen,ZHOU Luowei,et al.Three-phase four-wire active power filter with one-cycle control[J].Proceedings of the CSEE,2003,23(3):85-88,125. [7]陈瑶,金新民,童亦斌.三相四线系统中 SPWM与 SVPWM的归一化研究[J].电工技术学报,2007,22(12):122-127.CHEN Yao,JIN Xinmin,TONG Yibin.Study of the unification of SPWM and SVPWM in three-phase four-wire systems[J].Transactions of China Electrotechnical Society,2007,22(12):122-127. [8]OLORUNFEMI OJO,PARAG M.KSHIRSAGAR.Concise modulation strategies for four-leg voltage source inverters[J].IEEE Transactions on Power Electronics,2004,19(1):46 -53. [9]ZHANG RICHARD,PRASAD V HIMAMSHU,BOROYEVICH DUSHAN,et al.Three-dimensional space vector modulation for four-leg voltage-source converters[J].IEEE Transactions on Power Electronics,2002,17(3):314 -326. [10]SHEN D,LEHN P W.Fixed-frequency space-vector-modulation control for three-phase four-leg active power filters[J].IEE Proceedings Electric Power Application,2002,149(4):268-274. [11]龚春英,熊宇,郦鸣,等.四桥臂三相逆变电源的三维空间矢量控制技术研究[J].电工技术学报,2004,19(12):29-36.GONG Chunying,XIONG Yu,LI Ming,et al.Study of space vector modulation of Four-legged Three-phase inverter[J].Transactions of China Electrotechnical Society,2004,19(12):29-36. [12]VENKATARAMANAN G,DEEPAKRAJ M DIVAN,THOMAS M JAHNS.Discrete pulse modulation strategies for high-frequency inverter systems[J].IEEE Transactions on Power Electronics,1993,8(3):279-287. [13]杨宏,阮新波,严仰光.四桥臂三相逆变器的PWM控制[J].南京航天航空大学学报,2002,34(6):575-579.YANG Hong,RUAN Xinbo,YAN Yangguang.PWM control of a four-leg three-phase inverter[J].Journal of Nanjing University of Eronautics& Astronautics,2002,34(6):575-579. [14]KIM Janghwan,SUL Seungki.A carrier-based PWM method for three-phase four-leg voltage source converters[J].IEEE Transactions on Power Electronics,2004,19(1):66 -75.2.2 改进的3D-SPWM及其数字实现


3 3D-SPWM和3D-SVPWM的归一化及其本质
3.1 两种PWM的归一化

3.2 归一化的本质分析


4 仿真与实验
4.1 仿真
4.2 实验

5 结语
