空间电压矢量下SRM转矩脉动最小化
2010-06-06许爱德樊印海李自强
许爱德, 樊印海, 李自强
(大连海事大学信息科学技术学院,辽宁 大连 116026)
0 引言
开关磁阻电动机(switched reluctance motor,SRM)具有结构简单、制造成本低、性能可靠、效率高等一系列优点,但由于电机本身固有的双凸极结构和供电电流的非正弦性,使得电机转矩脉动较大,影响和制约了开关磁阻电机在伺服等要求转矩脉动较小领域的应用,降低SR电机的转矩脉动是电气传动领域和电机控制界的热点问题[1-2]。
目前,减小开关磁阻电机转矩脉动的研究主要从两个方面入手:一方面在电机设计时合理地设置电机参数,从而达到减小转矩脉动的目的[3];另一方面优化控制策略,探索减小电机转矩脉动的控制方法。文献[4]对近年来国内外学者对减小SRM转矩脉动的控制策略进行了综述,此文献中涉及到的控制策略主要是从间接转矩控制方面研究的,控制变量是电流或者磁链,通过相电流或者磁链的跟踪控制实现对转矩的间接控制。直接瞬时转矩控制(direct instantaneous torque control,DITC)是近年来有关SRM的几篇文献中提到的控制策略,其控制变量是瞬时合成转矩,根据反馈转矩与给定转矩的误差值,得到合适的换相逻辑,直接产生各相的开关信号[5-6,13-14]。
在DITC中,如何由转矩误差信号产生开关信号是减小转矩脉动的关键。文献[7]和文献[8]分别采用两步和三步换相法来实现转矩的在线分配,开关信号由此产生。文献[9]采用感应电机的空间电压矢量控制方法,根据转矩滞环控制器和磁链滞环控制器的误差信号,由开关表的选择来产生相应的开关信号。本文主要通过对开关表和转矩滞环的优化,结合两步和三步换相法的思想,讨论如何产生合适的开关信号,从而实现转矩脉动的最小化。
1 SRM转矩数学模型
磁路非线性、磁通分布复杂及相间非线性耦合等因素,致使建立SR电机精确的非线性转矩模型很困难。从理论性和实用性方面加以折中考虑,在一定的假设条件下[10],SRM的运行机理可以看做是一对电端口对机械端口的二端口装置,如图1所示。
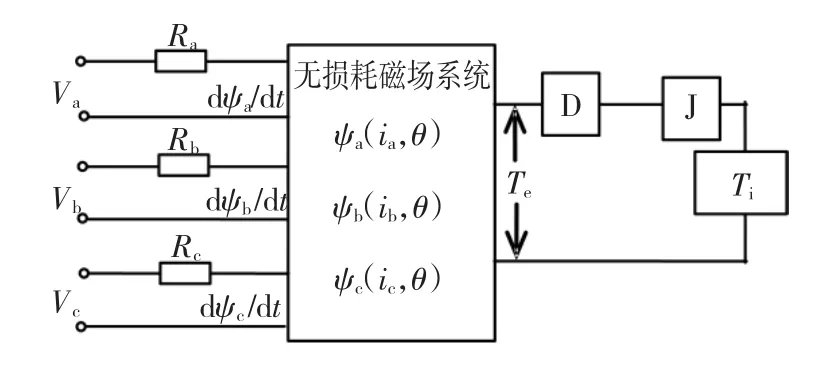
图1 SR电机系统示意Fig.1 Sketch of SRM system
根据基尔霍夫电压定律,SRM的一相电路方程为式中一相绕组的磁链ψ(i,θ)为该相绕组电流i和转子位置角θ的函数。根据式(1),文献[9]进行了详细的推导,得出开关磁阻电机近似的转矩数学模型为

同时由式(1)可知

式中e=v-iR,并且转子转速ω=dθ/dt,增量电感l=∂ψ/∂i,将电流在频域的等式(3)转换到s域的等式为

由此可知电流与磁链有一个一阶延迟环节,同时由式(2)知,转矩与电流和磁链有关,因此,完全可以通过控制磁链来控制SR电机的转矩。
2 空间电压矢量的构建及优化
2.1 磁链和电压的关系
根据式(1),在忽略电阻压降的情况下,一相电压和磁链的关系近似为v≈dψ/dt,即

从数学的角度考虑,将上式中的磁链和电压看作矢量,即可表示为
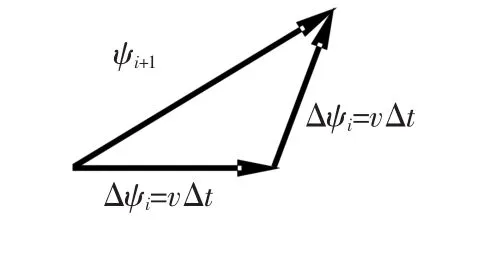
图2 磁链与电压矢量的关系Fig.2 Illustration of flux and voltage vector
如图2所示,可见在任何时刻,所产生的磁链增量Δψi的方向决定于所施加的电压矢量v,其幅值则正比于施加的时间 Δt[11]。
2.2 基本电压矢量的构建
以不对称半桥式功率转换器作为系统的功率电路,12/8极电机为研究对象,三相绕组完全独立[1]。对于每一相绕组来说,有工作状态和非工作状态的区分,非工作状态是指绕组无激励源状态,工作状态是有激励源状态,根据所加电压的不同又分为绕组施加正电压、零电压和负电压三种激励状态。具体如图3所示。

图3 绕组的三种工作状态Fig.3 SRM phase voltage states
正电压状态是指每相桥臂的两个主开关管同时开通,绕组上所加电压为+Vdc,用状态1来表示;零电压是指每相桥臂的两个主开关管一个关断,另一个开通,通过一个二极管自然续流,绕组上所加电压为零,用状态0来表示;负电压状态是指每相桥臂的两个主开关管都关断,通过两个二极管续流,绕组上所加电压为-Vdc,用状态-1来表示,此状态直至续流结束,该相绕组就进入非工作状态。
考虑到电压在绕组的空间位置,三相完全对称,相差120°。根据交流电机空间电压矢量的定义[12],可以定义SR电机的三个电压空间矢量va、vb和vc,分别对应三相绕组A、B和C的正电压即1状态,-1状态的电压矢量分别为-va、-vb和-vc,0状态的电压矢量即为 0。选取 v0(1,-1,0)、v1(1,0,-1)、v2(0,1,-1)、v3(-1,1,0)、v4(-1,0,1)和 v5(0,-1,1)六组电压矢量作为基本电压矢量,这些电压矢量定义在同一中心的六个区域N=0,…,5,每个区域60°,如图4所示。以v0为例,从图中可知,v0(1,0,-1)=1×va+0×vb+(-1)×vc。在控制过程中,矢量转换是在相邻矢量间进行,相邻矢量的转换是按照1—0—-1的顺序或者逆序转换,减小了换相期间的转矩脉动。

图4 基本空间电压矢量图Fig.4 Sketch of basic space voltage vector
将定子磁链矢量和基本电压矢量画到同一个坐标系中,根据对电压和磁链关系的分析,可以得到磁链矢量的运动轨迹和基本电压矢量的关系,如图5所示。假设定子磁链逆时针旋转,内圆表示控制磁链的最小值,外圆表示所控磁链的最大值。以N=0区域为例,若要增大电磁转矩,磁链矢量应逆时针运动,可选取电压矢量v1或v2,若要增大磁链矢量的幅值则选取v1,减小磁链矢量选取v2;若要减小电磁转矩,磁链矢量应顺时针运动,可选取电压矢量v4或v5,若要增大磁链矢量的幅值则选取v5,减小磁链矢量选取v4。在其他区域,也同样可以选取不同电压矢量来实现转矩和磁链的控制,总结如表1所示。

图5 磁链滞环控制图Fig.5 Illustration of flux control using hysteresis

表1 基本电压矢量选取表Table 1 Switching table for basic voltage vector
2.3 空间电压矢量的优化
根据上述基本电压矢量的选取依据,进一步分析图4所示发现,在N=1,3,5区域时,由于电压矢量变化的不对称性,会出现选取的电压矢量不能够使转矩正常增大的情形。以N=1为例,区域的电压矢量为v1(0,1,-1),当需要增大转矩且要求增大磁链时,会选取电压矢量v2(-1,1,0),A相状态0—-1变化使A相转矩减小,B相状态1—1保持不变,C相状态-1—0变化使C相转矩基本保持不变,这样三相合成瞬时转矩就会减小,显然跟增大转矩的要求不符,转矩就会超出滞环,如图6所示。
为了解决这一问题,可以考虑增加相应的电压矢量。仍以N=1区域为例,当检测到转矩超出一定的范围时,发电压矢量 v20(-1,1,1)代替 v2(-1,1,0),A相状态0—-1变化使A相转矩缓慢减小,B相状态1—1保持不变,C相状态-1—1变化使C相转矩快速增大,这样三相合成瞬时转矩就会增大,转矩得到了控制,如图7所示。

图6 转矩失控现象Fig.6 Sketch of losing control of torque

图7 转矩可控现象Fig.7 Sketch of controlled torque
同理在N=3时增加电压矢量v40(1,-1,1),N=5时增加电压矢量v00(1,1,-1),优化完的电压矢量如图8所示。控制过程中,当转矩在正常的滞环范围内时,按基本电压选取表发基本电压矢量,若转矩有超一定范围的情形,根据N=1、3和5的情况发相应增加的电压矢量。
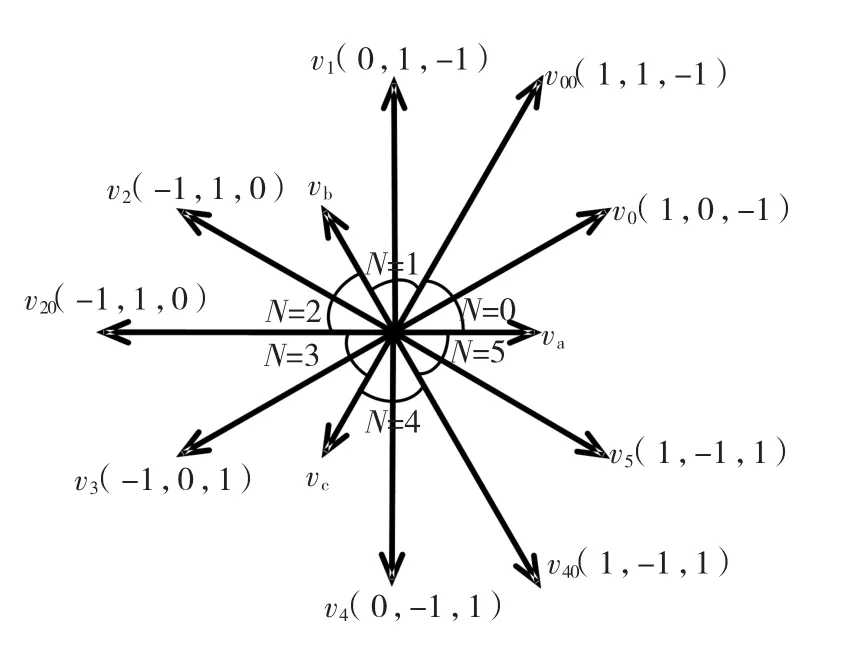
图8 优化后的电压矢量图Fig.8 Sketch of optimized space voltage vector
3 转矩滞环控制器
3.1 单滞环控制器
在DITC系统中,转矩滞环的工作过程如图9所示,转矩偏差 ΔT=Tref-Tfact,ΔTmin为滞环宽度。当实际瞬时转矩Tfact减小,ΔT增大,直到ΔT>ΔTmin即图中上升沿处,发转矩增大信号1;当实际瞬时转矩 Tfact增大,ΔT减小,直到 ΔT<ΔTmin,即图中下降沿处,发转矩减小信号-1。
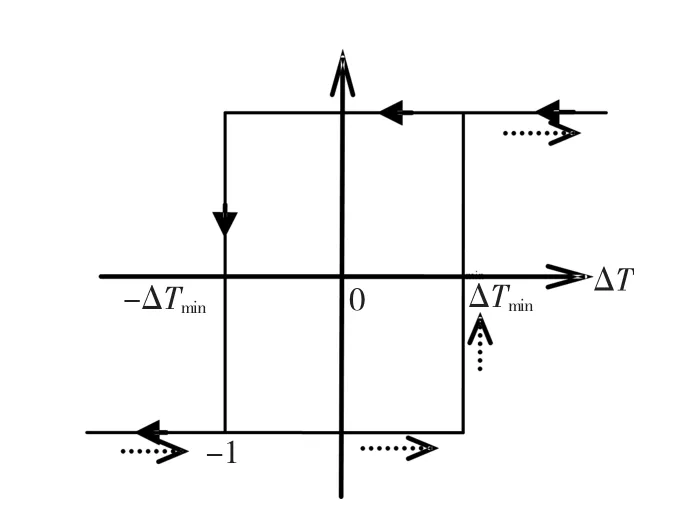
图9 单滞环Fig.9 Single hysteresis-controller
3.2 双滞环控制器
在SRM转矩单滞环控制的过程中,由于电压矢量的非对称性及电机转矩还受电流等因素的影响,如果仅单滞环控制,将会出现超滞环转矩失控的现象。为此采用双滞环控制,如图10所示,内滞环的宽度为ΔTmin,外滞环的宽度为ΔTmax。ΔT在内滞环时,采用基本的电压矢量控制,超过外滞环,则发1(+)和-1(+)标志,通过发优化的电压矢量来实现转矩的控制。
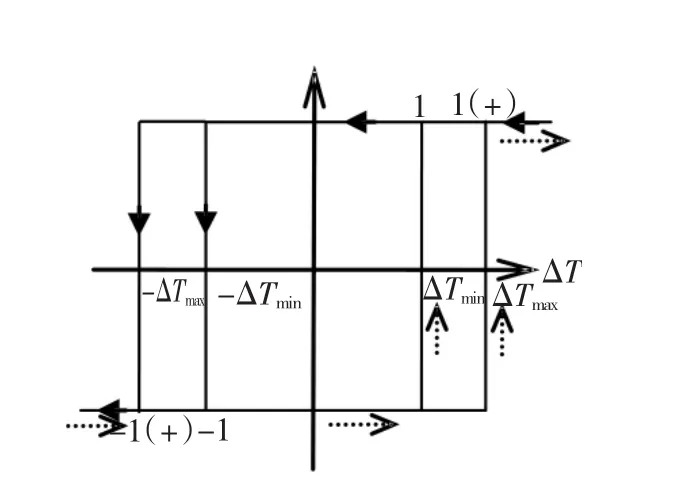
图10 双滞环Fig.10 Double hysteresis-controller
在实际的数字控制系统中,开关频率允许的情况下,为了实现转矩脉动的最小化,将内滞环宽度ΔTmin减小到0。这样内滞环的工作过程将变成ΔT>0发转矩增大信号1,ΔT<0发转矩减小信号-1,并且外滞环的宽度选取尽量小。
4 系统构成
SRM的DITC系统主要包括速度调节器、转矩滞环、磁链滞环、开关表、扇区判断和功率变换器等,系统框图如图11所示。速度调节器采用PID控制器,通过PID参数的合理配置来得到更好的转速特性,并且速度调节器输出的误差信号作为转矩的给定,与转矩传感器测得的瞬时转矩进行比较,以实现转速的快速调节。扇区是由空间电压矢量所划分的几个区域,扇区的判断可通过磁链的坐标变换,计算出瞬时合成磁链的空间位置角,从而判断出磁链所处的区域[15]。磁链滞环控制是通过矢量电压选取来直接控制合成磁链,只要开关频率足够,完全可将磁链控制在要求的滞环内。功率变换器采用不对称半桥式功率变换器。在以转矩为直接被控量的DITC系统中,其核心部分是开关表的构建和转矩滞环的控制。

图11 基于空间电压矢量的SRM直接转矩控制框图Fig.11 Block diagram of SRM system based on DITC with space voltage vector
5 仿真结果分析
根据本文所述的基于空间电压矢量的控制算法,采用Matlab仿真软件,对一台三相12/8极电机进行了基于DITC系统的SRM的转矩脉动最小化的仿真研究,选取参考磁链为0.3 Wb。
图12是基本电压矢量控制的直接瞬时转矩波形图,转速为950 r/min,由图12(a)可以看出,无论是电机由启动到速度达到稳定过程中,还是稳速运行过程中,由于电压矢量的不对称性,转矩存在较大的脉动现象。图12(b)是一个周期内对应各扇区的转矩仿真放大图,由图知转矩脉动是发生在1、3、5扇区内。
图13是采用优化电压矢量后的转矩波形图,转速为950 r/min,从图13(a)可以看出,无论是启动过程还是平稳运行过程中,转矩都得到了很好的控制,脉动明显减小。从图13(b)的局部放大仿真图知,采用优化电压矢量后,1、3、5扇区的转矩脉动被消除,从而使整个扇区内转矩比较平稳。

图12 基本电压矢量仿真波形Fig.12 Simulated waveform with basic voltage vector
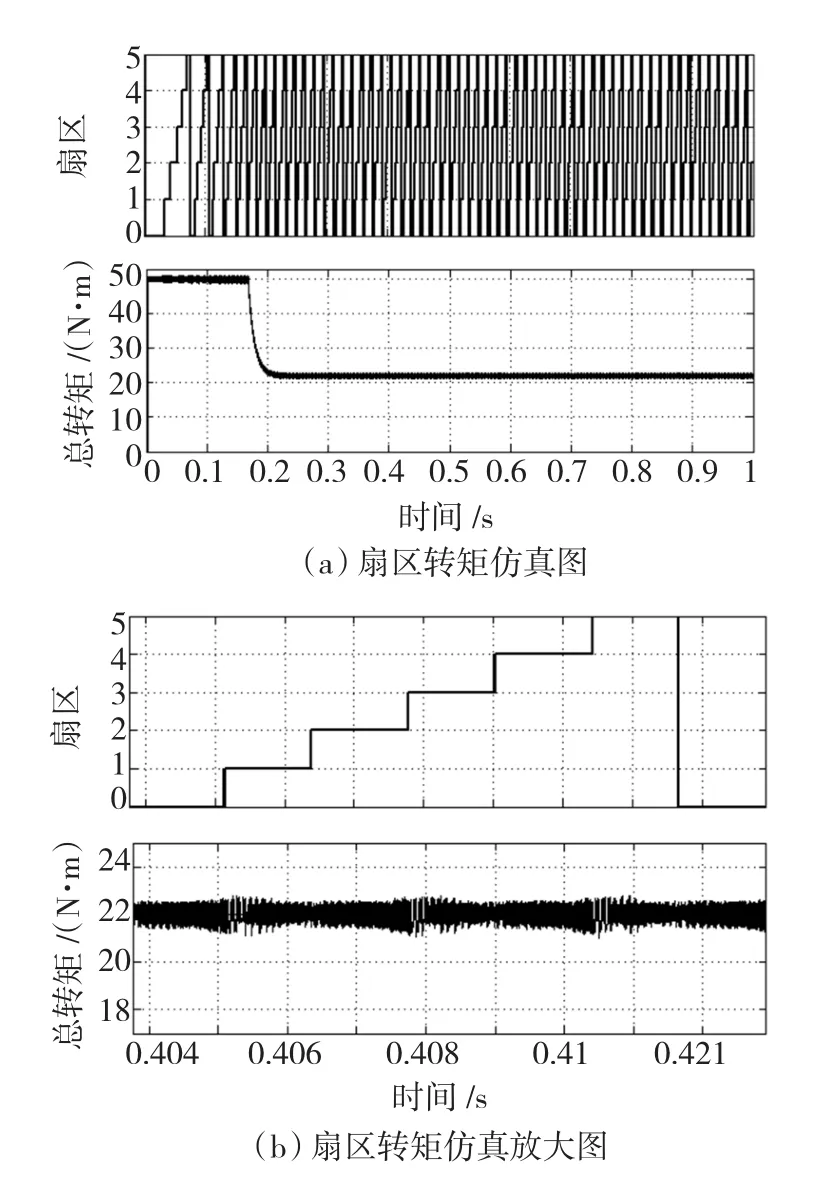
图13 优化电压矢量后仿真波形Fig.13 Simulated waveform with optimized voltage vector
图14是采用优化电压矢量控制后的磁链波形,图14(a)可知磁链轨迹是一圆形,图14(b)可知磁链幅值变化被限定在滞环宽度内,从而降低转矩脉动及电机的损害。

图14 磁链波形Fig.14 Flux waveform
图15是优化完的系统在给定转速突变时的波形图。可以看出在给定转速突变时,速度调节器开始会给出饱和值,致使电磁转矩突增,从而实际转速增大,进入速度调节器的线性区,给定和反馈的速度差减小,使电磁转矩逐渐减小。当速度达到给定转速时,进入转矩平衡状态。新状态下由于转速增大,由转子的机械运动方程知,需要提供的电磁转矩更大。
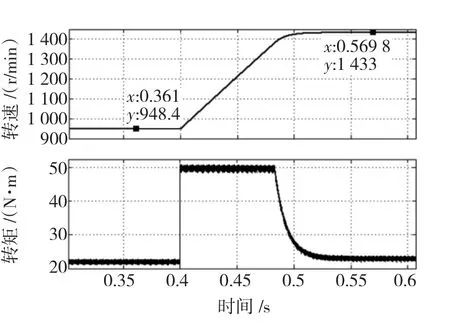
图15 转速变化时转矩变化仿真图Fig.15 Simulated waveform with changed speed
图16是优化完的系统在负载转矩突变时的波形图。无论在转矩突增还是突减过程中,转矩都能很快得到响应,转矩脉动不受影响,满足了系统对转矩的快速性要求。
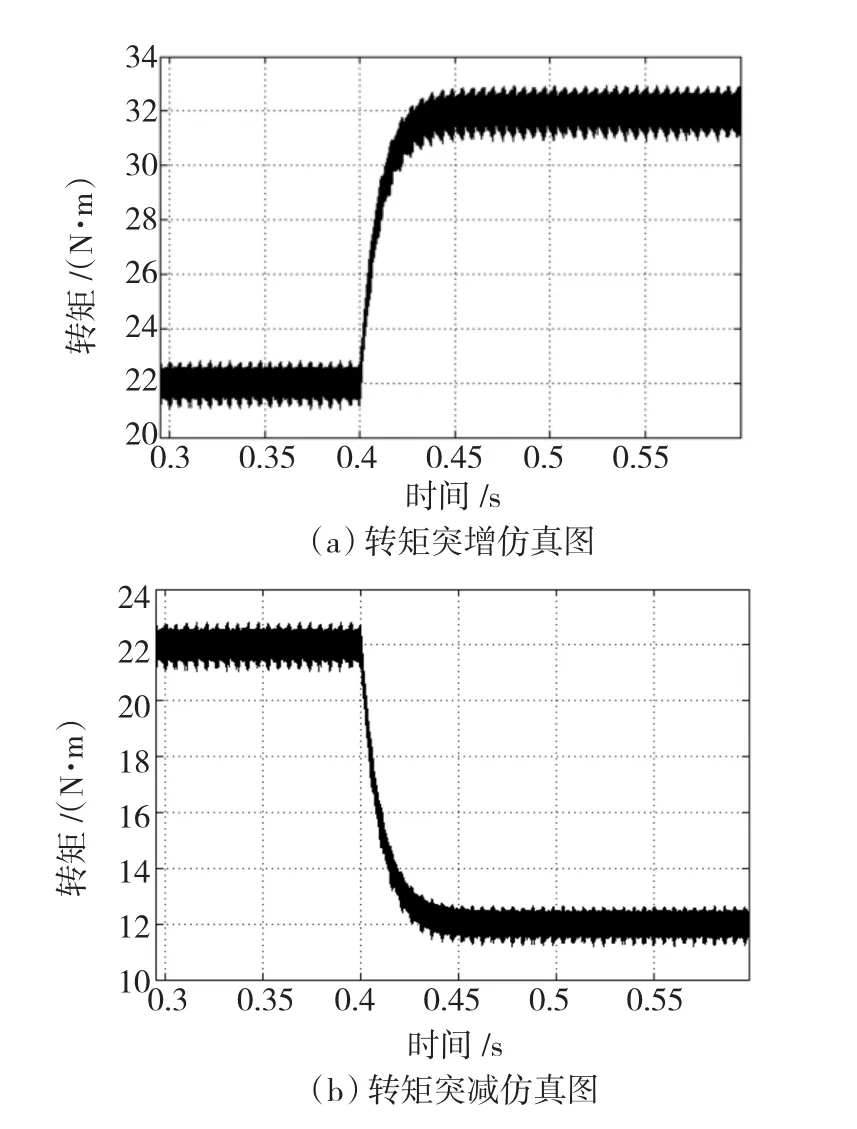
图16 转矩突变仿真图Fig.16 Simulated torque waveform with disturbing load
6 结语
采用空间电压矢量对SRM的直接瞬时转矩进行控制,通过对矢量的优化和转矩滞环的优化,在保证电机可靠运行的情况下,有效地控制了转矩和磁链,使系统的动静态性能良好,解决了传统控制方法转矩脉动大的问题,实现了转矩脉动的最小化,有效地控制了转矩脉动,并且实现方法简单。
[1]王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社,1998.
[2]吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2001.
[3]CHENADEC J L.Torque ripple minimization in switched reluctance motors by optimization of current waveforms and of tooth shape with copper losses and V.A.Silicon Constraints[C]//ICEM’94,September 5-8,1994,Paris,France.1994:559-564.
[4]周素莹,林辉.减小开关磁阻电机转矩脉动的控制策略综述[J].电气传动,2008,38(3):11 -16.ZHOU Suying,LIN Hui.Overviews of control strategies to minimize torque ripple of switched reluctance motor[J].Electric Drive,2008,3(3):11-16.
[5]INDERKA R B,DE DONCKER R W A A.DITC-direct instantaneous torque control of switched reluctance drives[J].IEEE Transactions on Industry Applications,2003, 39(4):1046-1051.
[6]FUENGWARODSAKUL N H,MENNE M,INDERKA R B,et al.High-dynamic four-quadrant switched reluctance drive based on DITC[J].IEEE Transactions on Industry Applications,2005,41(5):1232-1241.
[7]WU C H,POLLOCK C.Analysis and reduction of vibration and acoustic noise in the switched reluctance drive[J].IEEE Transactions on Industry Applications,1995,31(1):91 -98.
[8]POLLOCK C,WU C H.Acousitc noise cancellation techniques for switched reluctance drives[J].IEEE Transactions on Industry Applications,1997,33(2):477 -484.
[9]CHEOK A D,FUKUDA Y.A new torque and flux control method for switched reluctance motor drives[J].IEEE Transactions on Power Electronics,2002,17(4):543 -556.
[10]孙剑波.开关磁阻电机的减振降噪和低转矩脉动研究[D].武汉:华中科技大学,2005.
[11]杨耕,罗应立,等.电机与运动控制系统[M].北京:清华大学出版社,2006.
[12]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
[13]漆汉宏,张婷婷,李珍国,等.基于DITC的开关磁阻电机转矩脉动最小化研究[J].电工技术学报,2007,22(7):136 -140.QI Hanhong,ZHANG Tingting,LI Zhenguo,et al.SRM torque ripple minimization based on direct instantaneous torque control[J].Transactions of China Electrotechnical Society,2007,22(7):136-140.
[14]CHEOK A D,HOON P H.A new torque control method for switched reluctance motor drives[C]//IEEE IECON,October 22-28,2000,Nagoya,Japan.2000:387-392.
[15]陈丽莉.开关磁阻电机直接转矩控制策略的研究[D].长沙:中南大学,2008:26-29.
