具有低速高性能的电压定向V/F控制方法
2010-06-06陈伟杨荣峰于泳徐壮徐殿国
陈伟, 杨荣峰, 于泳, 徐壮, 徐殿国
(哈尔滨工业大学电气工程及自动化学院,黑龙江 哈尔滨 150001)
0 引言
开环恒压频比(V/F)控制是目前比较流行的一种调速方式,其控制算法简单且不依赖于电机参数,从而在交流调速领域得到了广泛的应用[1-3]。然而,随着矢量控制理论[4]的提出,越来越多的人开始致力于矢量控制算法的研究,很少有人对V/F控制算法做进一步的研究。实际上,由于逆变器的死区效应[5-7],感应电机定子电阻压降以及滑差的影响,在3Hz以下一般很难采用传统的V/F控制算法实现调速[8]。而且,随着负载的变化电机转速误差变化很大。因此如何提高V/F控制系统的低速性能和转速精确度仍然是一个值得研究的方向。
为提高系统的低速性能,在低速时需要进行电压提升以补偿电机的定子电阻压降。文献[9]提出了一种简单的标量补偿方法,根据定子电流与定子电阻的乘积IR对电压进行提升。工程实践表明这种补偿方法容易使得电机磁通Φm饱和,导致过补偿[10]。文献[11]提出了一种矢量补偿方法,但需要电压和电流传感器并且依赖于电机参数。在文献[12]中,通过电流观测推导出电机磁链,并保持其恒定来提高系统的低速性能。文献[13]则通过检测母线电压和电流,引入磁链和转矩环。这些方法低速性能的提高在于磁链观测的准确程度,他们低速性能的提高是以增加系统复杂性和降低V/F控制鲁棒性为代价的。在文献[14]中,利用定子电压和电流的夹角,从幅值和相位两方面来对定子电阻压降补偿,文中还提出了一种滑差补偿方法。但其计算非常复杂且不易实现。
本文提出了一种新型的基于定子电压定向的V/F控制策略。通过定子电压定向进行同步坐标变换,分解出电机的有功和无功电流。由有功电流对定子电阻压降进行补偿使得系统的低速性能得到了明显的提高。并根据感应电机的非对称T型等效电路推导出了一种简便的滑差补偿方法。最后通过实验对本方法的可靠性和有效性进行了验证。
1 电压定向V/F控制算法原理
1.1 定子电阻压降补偿方法
V/F控制在低频段时,定子端电压主要消耗在定子电阻上,使得励磁绕组两端电压相对减小从而导致气隙磁链幅值变小。电压提升主要是为了补偿电机定子电阻压降,从而在低速时仍能保持电机磁链恒定并等于其额定值。
根据图1感应电机非对称T型等效电路,空载时励磁绕组两端的电压

其中,isd0和isq0分别为空载时的有功和无功电流。

图1 感应电机非对称T型等效电路Fig.1 Unsymmetrical equivalent circuit of induction motor
在空载时,有功电流isd0很小近似于0,无功电流电流isq0则近似于空载电流。因此式(1)可写为

当负载加重时,转差率s增大,电机有功电流isd增大,而无功电流isq保持不变。此时励磁绕组两端电压变为

根据上面的分析可知,随着负载的增加励磁绕组两端电压减小了(Rs+jωeL1δ)isd。所以,当电压提升量取

即可使电机磁链保持恒定。在实际应用中,由于L1δ非常小,以至于可忽略不计。
通过上面的分析可知,根据有功电流来对定子电阻压降进行补偿可以使得电机的磁链在低速时仍能保持恒定并等于其额定值,不受负载大小的影响。
1.2 滑差补偿方法
感应电机的定子磁链与转子磁链只有相差一个角度时,才能在电机轴上产生一定的电磁转矩。也就是说感应电机必须产生滑差才能输出电磁转矩。滑差频率随着负载的增大而增大。在空载时,滑差频率很小可忽略不计。在满载情况下,滑差一般为额定频率的1%~5%。因此在调速精确度要求比较高的场合,必须对电机滑差进行补偿。且在低速时,滑差频率跟同步频率相比不能被忽略,必须进行补偿,否则电机带载起动时会发生堵转。
根据图1感应电机的等效电路,可推导出滑差频率计算公式

其中,iT和iM分别为转矩电流和励磁电流。他们的计算需要通过磁链定向来获得,这样无疑将增加系统的复杂度降低系统的鲁棒性。因此有必要寻求一种更简单可行的方法来计算电机的滑差频率。在本系统中,可用有功电流和无功电流分别代替式(5)中的转矩电流和励磁电流,来计算滑差频率,即

实验证明在不同负载情况下,采用这种方法都能将电机转速误差控制在0.5%以内,能很好的满足工程要求。
1.3 定子电压定向
以上的分析均是基于电机的有功和无功电流进行的,而通过定子电压矢量定向可以很方便的获得电机的有功、无功电流。由于V/F控制算法中,定子电压矢量的同步旋转频率f1是给定的。通过积分可得到同步坐标系的旋转矢量角θ1=∫2πf1dt,同时根据定子电压矢量与d轴之间的夹角θv可得到电压矢量角

因此,根据电压矢量角θ通过坐标变换即可得到电机的有功和无功电流,即

其中:isd为有功电流;isq为无功电流。
2 定子电压定向V/f控制算法实现
提出的算法原理框图如图2所示,主要分为3个部分:定子电阻压降补偿,滑差补偿和定子电压定向。
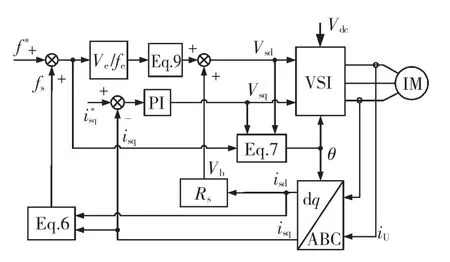
图2 改进型电压定向V/F控制原理Fig.2 Block diagram of improved stator voltage oriented V/F control
无功电流PI控制器的输出Vsq作为SVPWM的q轴分量。而SVPWM的d轴分量则根据V/F比计算出,仍然满足电机的定子电压与频率比为一常数这个原则。计算公式为
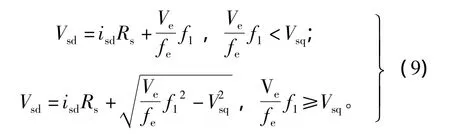
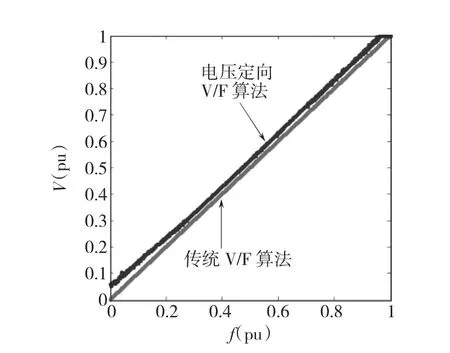
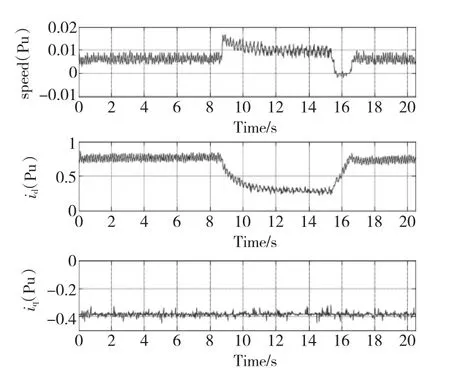
其中:Ve、fe分别为电机的额定电压与频率;isd为电机的有功电流。在频率比较低时(即f1 由此可知,电机的定子电压在低频段明显大于V/F曲线的给定电压,呈上扬的趋势,如图3所示。此即为低频段的电压提升。 图3 采用改进型电压定向V/F控制算法时的V/F曲线Fig.3 The V/f curve of the improved stator voltage oriented V/f control algorithm 通过7.5 kW的实验平台对本文所提出的定子电压定向V/f控制方法进行了验证。实验所用感应电机额定参数为:Pe=7.5 kW,Ve=380 V,fe=50 Hz,Ie=15.6 A,ne=1440 r/min。电机参数为:Rs=0.7006 Ω,Rr=0.6012 Ω,Lm=122.11 mH,Ls=Lr=125.7 mH控制芯片采用TMS320F2812,PWM开关频率为10kHz,死区时间为6.4 μs。本文中的实验波形一部分是示波器波形。另一部分则是通过在DSP中开辟一段缓冲区将实验数据采样储存起来,然后再传给PC机,利用Matlab画出。 图4为带满载起动时电流波形,在第二个周波电流就达到稳态,带载起动响应非常快。图5为25 Hz下突减负载和突加负载时的电流波形,图6为突减和突加负载时的电机转速、有功电流和无功电流波形,其中各变量均为标么值,转速通过2000 P/R的增量编码器测得。从图中可看出在突减和突加负载时,电机转速的变化很小。无功电流基本保持不变,有功电流跟随负载的变化而变化,系统具有较好的动态响应能力。 图4 电机满载起动电流波形Fig.4 Motor starting current waveform with full load 图6 25 Hz加、减负载时电机转速、有功电流isd以及无功电流isq波形Fig.6 Dynamics response at 25 Hz with torque changing.From top:speed,active current isdand active current isq 图7给出了0.3 Hz满载时的电机电流波形,电流波形具有较好的正弦度且很平稳。在0.3 Hz加、减负载时的电流波形如图8所示,图9给出了相应的电机转速、有功电流和无功电流波形。从图中可看出,在0.3 Hz突减负载时电机转速会增加8 r/min左右。在突加负载时有功电流根据负载大小逐渐建立起来。只有当有功电流达到一定值时电机才能再次带动负载转动起来,此过程大概需要1s左右。根据测得的电机转速信号可看出,无论是在空载还是满载情况下电机运行都很平稳,没有步进现象。 图7 0.3 Hz满载电流波形Fig.7 Motor starting current waveform from 0 to 0.3 Hz with full load 图8 0.3 Hz加、减负载时的电流波形Fig.8 Dynamics response at 0.3 Hz with torque changing 图9 0.3 Hz加、减负载时电机转速、有功电流isd以及无功电流isq波形Fig.9 Dynamics response at 0.3 Hz with torque changing.From top:speed,active current isdand active current isq 电机在稳态时的转速精度如表1所示。其中分别给出了在空载、50%额定负载和满载情况下各频率点所对应的电机平均转速。从表中测得的数据可知,在低频段,满载时电机转速精度较高,随着负载的减小转速误差越来越大,最大达到了9r/min。在中高频段转速误差平均在正负7r/min以内波动。由此可见,采用本文提出的滑差补偿方法,电机转速精度平均在5%倍额定转速以内,完全能满足工程应用要求。 表1 不同负载情况下各频率点转速值Table 1 Measured steady speed at different frequency with different load 本文主要是针对传统的V/F控制算法低速性能差且转速精确度低的问题,提出了一种新型的基于定子电压定向的V/F控制算法。该算法在传统V/F控制算法的基础上融合了矢量控制理论的思想,它通过定子电压矢量角对电机电流进行解耦,分解出电机的有功和无功电流并分别对其控制使得系统性能得到明显提升。由于不需要对电机磁链进行观测,该算法仍保留了V/F算法的高鲁棒性。通过实验验证了此方法的有效性,在0.3 Hz满载情况下电机能平稳运行。 值得注意的是,此方法是针对电机的稳态模型推导出来的,在快速性方面与矢量控制算法相比还存在一定差距。因此提高传统V/F控制系统的响应速度将是另一个有待突破的研究点。 [1]HAMILTON R A,LEZAN G R.Thyristor adjustable frequency power supplies for hot strip mill run-out tables[J].IEEE Transactions on Industry and General Application,1967,IGA-3:168-175. [2]SLABIAK W,LAWSON L.Precise control of a three-phase squirrel-cage induction motor using a practical cyclconverter[J].IEEE Transactions on Industry and General Application,1966,IGA-2:274-280. [3]SHEPHERD W,STANWAY J.An experimental closed-loop variable speed drive incorporating a thyristor driven induction motor[J].IEEE Transactions on Industry and General Application,1967,IGA-3:559-565. [4]BLASCHKE F.The principle of field orientation as applied to the new transvector closed loop control system for rotating-field machines[J].Siemens Review,1972,34(5):217-220. [5]吴茂刚,赵荣祥,汤新舟.正弦和空间矢量PWM逆变器死区效应分析与补偿[J].中国电机工程学报,2006,26(12):101-105.WU Maogang,ZHAO Rongxiang,TANG Xinzhou.Dead-time effects analysis and compensation of SPWM and SVPWM inverter[J].Proceedings of the CSEE,2006,26(12):101-105. [6]胡庆波,吕征宇.一种新颖的基于空间矢量PWM的死区补偿方法[J].中国电机工程学报,2005,25(3):13-17.HU Qingbo,LV Zhengyu.A novel method for dead-time compensation based on SVPWM[J].Proceedings of the CSEE,2005,25(3):13-17. [7]王君瑞,马宏兴,郭冀岭,等.异步电机矢量控制中死区补偿的仿真研究[J].电机与控制学报,2006,10(2):164-170.WANG Junrui,MA Hongxing,GUO Jiling,et al.Simulation of the dead-time compensation in vector-controlled induction motor[J].Electric Machines and Control,2006,10(2):164 -170. [8]KOGA K,UEDA R,SONODA T,Achievement of high performances for general purpose inverter drive induction motor system[J].IEEE Proceeding of IAS,1989,1:415 -425. [9]STICH F A.Transistor inverter motor drive having voltage boost at low speeds[P].U.S:3971972,1976-07-27. [10]罗慧,王庆义,尹泉,等.基于电流解耦的异步电机V/f控制补偿方法[J].华中科技大学学报,2007,35(10):60-63.LUO Hui,WANG Qinyi,YIN Quan,et al.A study on compensation of the V/F controlled induction motor drives based on decoupled stator current[J].Journal of Huazhong University of Science and Technology:Nature Science,2007,35(10):60-63. [11]ABBONDANTI A.Flux control system for controlled induction motors[P].U.S:3909687,1975-09-30. [12]GREEN T C,WILLIAMS B W.Control of induction motor using phase current feedback derived from the DC link [J].IEEE Proceeding of EPE,1989,3:1391-1396. [13]XUE Y,XU X,HABETLER T G,et al.A low cost stator flux oriented voltage source variable speed drive[J].IEEE Proceeding of IAS,1990:410-415. [14]GARCIA A Munoz,LIPO T A,NOVOTNY D W.A new induction motor V/f control method capable of high-performance regulation at low speeds[J].IEEE Transactions on Industry Applications,1998,34(4):813 -821.
3 实验结果与分析

4 结语
