波浪情况下民机水上迫降性能数值分析
2024-03-01李勐陈星伊陈吉昌吴彬童明波
李勐,陈星伊,陈吉昌,吴彬,3,童明波,*
1.中国航空研究院,北京 100012
2.南京航空航天大学 航空学院,南京 210016
3.中国特种飞行器研究所,荆门 448001
民机水上迫降指民用客机紧急降落于水面的过程[1]。与撞击地面不同,飞机水上迫降过程中,自由变化的水面使得水动力作用面积较大,传统的吸能结构无法吸收大部分冲击能量,从而更加考验飞机整体结构的强度性能。随着民用航空业的高速发展,民机水上迫降事故经常出现。据统计,1938—2009 年,飞机水上迫降事故共发生219 起,其中不乏损失惨重的重大事故[2]。作为民机水上迫降成功案例,哈德逊奇迹家喻户晓,1459 号班机成功迫降于水面,得益于欧美对民机水上迫降问题的多年研究。
自20 世纪60 年代以来,在制定适航规章时,各国均编入了水上迫降的相关内容。中国民用航空规章第25 部对水上迫降的结构、设备要求与迫降计划有明确规定[3]。基于美国联邦航空规章,美国联邦航空管理局和交通部发布了《运输机着水和水上迫降性能报告》,报告对计划性水上迫降过程给出了以下建议[4]:对于计划性水上迫降,应尽可能减少飞机重量,将襟翼置于最低位置,起落架尽可能收起;着水前,尽可能降低着水速度,且下沉速度不得高于1.524 m/s;飞机俯仰 角 保 持 在10°~14°,滚 转 角 和 偏 航 角 应 低于10°。
根据飞机是否受控,可将飞机水上迫降分为计划性水上迫降和非计划性水上迫降[4]。计划性水上迫降过程中,可以通过优化迫降计划来降低伤亡率,这一过程属于可控范畴,目前这方面的研究更加集中。随着计算机科学与数值仿真技术的突飞猛进,研究人员和相关学者逐渐选择成本更低、效率更高的数值仿真方法来研究飞行器水上迫降问题,以辅助甚至替代相关试验。基于CAST 项目,英国克兰菲尔德大学、CIRA、DLR等研究机构以全尺寸韦斯特兰WG30 直升机为研究对象,分别通过试验和数值模拟方法研究了水面坠撞和水上迫降过程。结果表明,撞击阶段初期,数值仿真与试验结果较为吻合,但没有考虑气动力的影响,整体机体加速度数值仿真结果相比于试验结果偏高[5]。德国学者Bensch 等[6]基于KRASH 软件提出了数值仿真结合理论方法的混合求解思路:通过水动力、结构响应和机体表面压力分布分开求解再耦合;对荷兰福克VFW614 客机计划性水上迫降问题进行了研究,并与试验测试结果进行了对比。克兰菲尔德大学联合欧洲多国高校、公司和研究机构,开启SMAES 项目[7],该项目以空客CN235 军用运输机为研究对象,解决了SPH 计算水上迫降时不能模 拟 尾 部 吸 力 的 问 题。 Gomes[8]、Groenen⁃boom[9]、Climent[10]等以刚体和弹性 体CN235 飞机为研究对象,基于ALE-FEM 和SPH-FEM 算法,通过修正罚函数接触算法中的SEPTHK 厚度因子,数值模拟了水上迫降过程,发现尾部吸力影响显著。基于CRAHVI 项目,法宇航学者Ortiz 等[11]使用RADIOSS 软件中的ALE-FEM/SPH-FEM 方法,分析了全尺寸空客A321 飞机迫降时机身的变形和压力情况,验证了ALE/SPH-FEM 方法研究弹性体飞机水上迫降问题的可 行 性。 Woodgate 等[12]基 于SPH 方 法,以AW159 直升机为研究对象,仿真分析了四级波浪下该直升机水上迫降过程,所得结果与试验结果进行了对比分析。欧盟启动SARAH 项目,Climent 等[13]通 过SPH-FEM 和CFD 方 法 研 究了飞行器水上迫降时机身结构响应和吸能效率,结果表明:SPH 方法模拟垂向水面撞击时结果吻合较好,但是在计算气动力时不能完全保证守恒,在模拟有前飞速度的飞行器水上迫降时有较大缺陷,CFD 方法能很好地计算流体特性,但无法研究弹性体飞机模型水上迫降时结构响应对流体产生的影响。因此,现有的数值计算方法还不能全面分析民机水上迫降问题,对应的流固耦合软件仍在完善中。
近年来国内诸多高校及科研院所都在关注飞行器高速着水问题。刘沛清课题组[14-18]基于RANS 求解器和二次开发算法,以SAX-40、ARJ-21、AG600 为研究对象,分析了飞行器水上迫降力学特性。张韬等[19]以某型支线客机缩比模型为研究对象,进行了水上迫降缩比试验,研究了水上迫降性能,并使用MSC.Dytran 进行了数值仿真分析,结果表明:尾部吸力影响较大,在研究飞机水上迫降问题时应予以考虑。张苏[1]基于ALE-FEM 算法,分别以刚性体和弹性体民机模型为研究对象,通过气动力加载至飞机结构的方法建立了弹性体民机水上迫降模型,分析了刚性体与弹性体模型水上迫降运动特性的差异。童 明 波 课 题 组[20]基 于ALE-FEM 和SPH-FEM算法,分析了飞行参数对直升机水上迫降的影响。孙建红团队[21]基于ALE-FEM 算法,以带气囊直升机为研究对象,分析了飞行参数及气囊安装位置对直升机水上迫降的影响。
目前,在基于国内外适航规章要求的民机水上迫降研究中,迫降环境以静水面为主,波浪水面下民机水上迫降的研究内容较少,并且不够深入。因此本文以民机刚性模型为研究对象,对比分析静水面和波浪水面下民机水上迫降性能,对有关水气混合效应的发展过程进行机理分析,评估相同迫降点下波浪要素和初始撞击速度对迫降性能的影响,希望能通过计算分析为民机水上迫降性能评估及适航条例优化提供技术参考与数据支持。
1 数值计算方法
1.1 数值计算格式
选用三维雷诺平均不可压缩Navier-Stokes(N-S)方程作为流体控制方程,选用标准k⁃ω湍流模型,壁面处选用增强壁面处理。选用SIMPLEC(Semi-Implict Method for Pressure-Linked Equations)算法以耦合压力速度,流场梯度选用格林高斯法,选用有限体积法离散控制方程,其中,压力项选用PRESTO!格式离散,体积分数项选用高分辨率交界面捕捉方法(HRIC),非定常项选用二阶隐式格式离散,其余项均采用二阶迎风格式离散。
1.2 自由液面捕捉方法
在入水砰击类问题中,不断变化的水气交界面直接影响着物体入水过程。目前,流体体积分数法(Volume of Fluid, VOF)可以实时捕捉水气交界面的变化,而且简单高效,稳定易行[22]。同时,利用自适应网格细化技术(Adap⁃tive Mesh Refinement)可以提高捕捉精度,提升计算效率。
1.2.1 流体体积分数法
VOF 方法中,唯一变量是标量函数F(流体体积函数)。函数F表示网格单元内流体的体积所占网格单元体积的相对比率:
式中:V1和Vi分别表示网格中流体1 的体积和网格i的体积。含有自由液面的计算单元中,采用线段近似逼近表示自由液面的形状,线段的数学表达式为
界面重构算法包含两部分:法向量n及常数c的求解。通常采用Youngs 算法求解法向量,该算法通过混合单元以及周围相邻单元的体积比率F来计算法向量。求出混合单元中自由液面逼近线段的法向量后,通过非线性方程(3)求得c,便可以确定自由液面的位置:
式中:函数ΔVol(c)表示给定线段法向量后,该线段和网格边界所围面积;ΔVol 表示自由液面逼近线段与网格线段及边界所围成的多边形面积。在自由液面确定以后,通过求解输运方程,体积比率可更新到下一个时间步。
1.2.2 自适应表面网格细化
自由表面网格细化准则用于控制VOF 多相流数值模拟中多相交界面的网格细化,以提高交界面分辨率。基于体积分数梯度的幅值,当网格单元满足式(4)时,识别并标定为交界面的网格单元:
式中:∇amax表示该网格单元可达到的最大体积分数梯度;ri为自定义的灵敏度参数。基于初始特征变量I0,对交界面的网格进行标定,从而估算下一步交界面的形状与位置。
时间步长Δt、自适应网格更新频率NAMR、自定义的扫描宽度上限因子CUp和扫描宽度下限因子CDown决定了下一步自适应网格细化的时刻。
为了标记初始与下一步交界面之间所有网格单元,基于显示欧拉格式,求解上限和下限的输运方程:
特征变量I=max(IDown,IUp)。最后,根据以下规则为自适应网格细化标记网格单元:如果e∈I0,表示网格仍在交界面处,则保留现有网格尺寸不变;如果e∈Ifinal且e∉I0,表示网格处于初始交界面与下一步交界面之间的位置,则网格将被细化;除此之外,网格将被粗糙化,若网格尺寸已处于原始大小,则网格将保持不变。
1.2.3 速度入口造波法
选用斯托克斯五阶波来数值模拟非线性规则波,波面方程见式(9)[23]。斯托克斯波理论假定:含小参数ε的幂级数展开式可以表示波浪运动基本方程的解,小参数ε是与波动特征值有关的无因次常数,在幂级数展开式中,级数项数越多,越接近于实际波动特性。
速度入口造波法的核心思想:在入口边界上,对水域部分施加波浪速度的解析解,使波面随时间推进而传播到流场之中。
1.3 算例验证
基 于Azcueta[24]的 楔 形 体 入 水 砰 击 试 验,对楔形体入水砰击过程进行数值仿真。通过与试验结果的误差对比,验证整体动网格法的可行性。图1 展示了楔形体入水砰击过程的初始状态,高纵横比值为0.61 m×2.44 m,底角为20°,基于质心顺时针旋转5°,下顶点距水面0.61 m。其质量为0.201 kg,转动惯量为1 111 kg ⋅m2,质心位于下顶点上方0.216 m 处。背景域宽4 m,高2.5 m。整体动网格下目标网格尺寸为0.02 m,最小网格尺寸为0.005 m。重叠网格下运动域宽1 m,高0.4 m,背景域与运动域的目标网格尺寸为0.02 m,最小网格尺寸为0.005 m。

图1 初始状态示意图Fig.1 Initial state diagram
初始阶段,楔形体做自由落体运动,0.35 s楔形体开始砰击水面,此时下沉速度达到11.25 m/s。图2 所示为冲击加速度对比,整体动网格法与重叠网格法下其变化趋势与试验结果吻合。 整体动网格法下,其最大值为12.62 m/s2,与试验值相比,误差为1.4%;重叠网格法下,其最大值为11.28 m/s2,与试验值相比,误差为9.3%。结果表明,整体动网格法和重叠网格法下数值解与试验值变化趋势吻合较好,由于数值仿真中未能考虑三维效应的影响,导致仿真结果存在误差,误差在可接受范围之内。但整体动网格法误差更小,更适用于模拟入水冲击问题。

图2 冲击加速度对比Fig.2 Impact acceleration comparison
为了验证VOF 法和自适应网格技术的有效性与准确性,基于Iafrati 等[25]的平板高速定向着水试验,使用STAR-CCM+商业软件,对平板高速定向着水过程进行数值仿真。研究对象为平板,长1 m,宽0.5 m,厚15 mm。试验中,平板定向着水过程为,通过加速系统的作用,平板达到指定速度,即前飞速度为40 m/s,下沉速度为1.5 m/s,并沿指定方向(仰角为4°或10°)冲击水面。
基于试验结果,本算例数值模拟了相应平板高速着水过程,重点验证VOF 法和自适应网格技术的可行性。图3 展示了计算域规格、网格及边界条件,选用整体动网格法进行建模,计算域长6 m,宽2 m,高2 m。目标网格尺寸为0.032 m,最小网格尺寸为0.01 m。初始状态下,平板紧邻水平面,俯仰角为10°。运动过程中,前飞速度保持40 m/s,下沉速度保持1.5 m/s。

图3 计算域规格、网格及边界条件Fig.3 Computational domain specifications, meshes and boundary conditions
图4 所示为试验与数值仿真算法下法向力数值对比,平板入水砰击过程持续了0.035 s,其法向力一直呈现上升趋势,并且试验与仿真算法下数值变化趋势吻合,误差在可接受范围之内。试验中平板不能保持匀速运动,0.035 s 后速度下降了约2 m/s,这可能是导致试验值与仿真值存在误差的主要原因。总体而言,VOF 法和自适应网格技术可以有效模拟入水冲击过程并且提升水气交界面的捕捉精度,从而提高计算结果的准确性与稳定性。

图4 试验与数值仿真算法下法向力数值对比Fig.4 Comparison of normal force values between ex⁃perimental and numerical simulation algorithms
2 计算结果及分析
以空客A320-200 为研究对象,通过分析载荷特性和运动特性,进而评估和分析民机水上迫降性能。
2.1 民机几何模型和计算工况
空客A320-200 的基本参数详见表1,不考虑飞机结构的吸能效率和传力路径,重点分析水上迫降过程的载荷特性与运动特性,故采取如下简化策略:省略翼梢小翼及其他细小结构,保留飞机气动外形,发动机处于关闭状态,飞机总质量及转动惯量设置于飞机质心处。 其中,S1(X,Y,Z)为地面坐标系,S2(x,y,z)为机体坐标系。

表1 空客A320-200 的基本参数Table 1 Basic parameters of Airbus A320-200
参照国内外民机水上迫降适航验证程序的研究内容,模拟的波浪条件应不大于四级海况,海况等级对应参数为波高,波长应不大于机身长度的2 倍[26-28]。为了对比分析波浪水面与静水面下民机水上迫降性能差异、研究不同波长和波高对民机水上迫降过程的影响,设置计算工况如表2 所示。

表2 计算工况汇总Table 2 Summary of calculation conditions
2.2 边界条件和运动域网格划分策略
图5 所示为初始状态示意图。飞机初始俯仰角为12°,最低点位于平衡位置并且紧靠自由液面,该点到自由液面的最小距离小于0.002 m。水上迫降过程中,飞机做三自由度运动(俯仰、前飞和下沉运动)。

图5 初始状态示意图Fig.5 Initial state diagram
选用整体动网格法以构建仿真模型的运动域。图6 展示了整体动网格法下计算域规格、网格及边界条件,该计算域长140 m,宽25 m,高35 m。为了减少网格量,提高计算效率,采用对称模型,图中绿色端面为对称面,蓝色端面为压力出口,其余端面为速度入口。
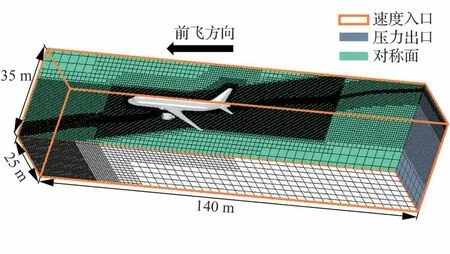
图6 整体动网格法下计算域规格、网格及边界条件Fig.6 Computational domain specifications, meshes and boundary conditions under global moving mesh method
选用切割体网格对计算域进行网格划分。图7 展示了计算域网格划分策略,加密区分别为造波区、遭遇区和消波区。造波区中,目标网格尺寸为0.4 m,最小网格尺寸为0.2 m;遭遇区中,目标网格尺寸为0.2 m,最小网格尺寸为0.1 m;消波区中,目标网格尺寸为0.8 m,最小网格尺寸为0.4 m。对于飞机表面网格,目标表面网格尺寸为0.4 m,与此同时,对重要部位(如机底、机翼前缘、吊舱底部等)进行了加密,最小表面网格尺寸为0.1 m。

图7 计算域网格划分策略Fig.7 Computational domain meshing strategy

图8 静水面下飞机水上迫降运动过程Fig.8 Process of aircraft ditching in calm water condition
2.3 静水面与波浪水面下水上迫降性能对比
大值,达到2.23g;垂向过载在0.66 s 升至最大值,达到1.71g,之后趋于1g。
如图9(b)所示,在水平载荷作用下,前飞速度(方向与X轴正方向相反的水平速度)整体呈下降趋势,2.5 s 降至12.09 m/s,与初始前飞速度相比,下降了27.91 m/s。0.48 s 下沉速度(方向与Z轴正方向相反的垂向速度)升至最大值,达到3.05 m/s,是初始下沉速度的2.14 倍。在垂向载荷的作用下,下沉速度随后下降。如图9(c)所示,在水平和垂向载荷共同作用下,飞机受到低头力矩,俯仰角整体呈下降趋势,2.5 s 降至7.41°;质心下沉位移(方向与Z轴正方向相反的质心垂向位移)整体呈上升趋势,可见2.5 s 内没有出现跳跃现象。如图9(d)所示,0.31 s 浸没面积开始增大,2.5 s 达到202.4 m2,下沉深度整体呈上升趋势,2.5 s 达到1.98 m。

图9 静水面下载荷特性和运动特性变化历程Fig.9 History of load and motion characteristics in calm water condition
图10 所示为撞击阶段飞机底部水气两相及压力云图。撞击阶段中,机身底部压缩水面附近的空气,进而产生空气垫效应。由于机身具有一定的横向曲率,空气垫上凸且向机身两侧逐渐减弱。撞击初期,机身底部形成的空气垫会对水面产生挤压作用,进而形成射流。当机身底部着水撞击后,撞击区域的水加速飞溅,随着撞击过程的发展,形成大量射流。在不考虑空化的前提下,空气此时涌入机身底部的撞击区域,形成水气混合区域。飞机继续撞击机身底部的水气混合区域,射流形成时,机身底部也会压缩该区域内的空气,使其加速向外排出,所以水气混合区域的机身底部受到吸力作用(图10 中0.2、0.4、0.6 s 机身底部有明显的负压区),但是该工况下吸力并没有对运动特性产生明显影响。吊舱外形也具有一定的横向曲率,所以吊舱底部也可以观察到空气垫效应,并且也会形成水气混合区域,相比于机身,吊舱的纵向长度小,经历短暂的撞击后,便开始潜入水中,所以其空气垫效应和水气混合区域的持续时间更短。如图8 所示,潜入水中的吊舱会激起大量射流。相比于撞击阶段,在滑行阶段中,空气垫效应明显减弱,机身底部几乎不受吸力作用。

图10 静水面下撞击阶段飞机底部水气两相及压力云图Fig.10 Water vapor phase and pressure cloud images of aircraft bottom during impact in calm water condition
图11 所示为撞击阶段受力示意图。飞机受气动升力、气动阻力、气动力矩、水动力、静水压力和重力的作用。其中,水动力主要由冲击压力和黏性阻力组成,在水上迫降过程中起主要作用。

图11 撞击阶段受力示意图Fig.11 Schematic diagram of force during impact
最大水平过载是最大垂向过载的1.3 倍,主要原因是飞机在撞击阶段遭遇下潜现象。0~0.64 s 内,飞机后机身底部率先着水撞击,随着质心下沉位移不断增长,下沉深度和浸没面积不断增长,黏性阻力随之上升;浸没面积沿水平方向的投影面积也持续上升,使得水平冲击压力上升,所以水平过载在该时间段内呈上升趋势;0.64 s 吊舱底部开始着水撞击,随着吊舱不断下沉,飞机部分后机身段、水平尾翼和吊舱相继潜入水中,下沉位移和浸没面积继续增长,浸没面积沿水平方向的投影面积也继续上升,所以水平过载继续呈上升趋势,并在0.97 s 升至最大值,达到2.33g。吊舱完全潜入水中后,虽然下沉深度还在增长,但是浸没面积由上升变为停滞状态,浸没面积沿水平方向的投影面积也出现停滞。1.2 s 后机身底部的浸没面积持续上升,与此同时,机身和吊舱底部激起的射流覆盖了机身和机翼上表面的部分区域,因此浸没面积在1.2 s后呈上升趋势,但是浸没面积沿水平方向的投影面积上升幅度有限。与此同时,前飞速度不断下降,水平冲击压力随之下降,因此水平过载呈下降趋势。
图12 展示了2.5 s 内波浪水面下飞机水上迫降运动过程,飞机部分后机身段、水平尾翼和吊舱相继潜入水中。0.9 s 时飞机部分后机身段和水平尾翼几乎完全潜入水中,1.7、2.5 s 时潜入水中的吊舱激起明显的射流。

图12 波浪水面下飞机水上迫降运动过程Fig.12 Process of aircraft ditching in wave condition
图13 分别展示了该工况下民机水上迫降过程中水平过载、垂向过载、水平速度、垂向速度、俯仰角、质心垂向位移、浸没面积和下沉深度的变化历程。根据载荷特性和运动特性的变化特点,2.5 s 内波浪水面下飞机水上迫降过程可以分为3 个阶段:首次撞击阶段、波峰撞击阶段和波谷滑行阶段。首次撞击阶段中,最低点位于平衡位置附近,飞机与波峰发生第1 次撞击,且垂向过载存在明显的上升、下降或振荡的过程。波峰撞击阶段中,最低点低于平衡位置,飞机与波峰正面相撞,载荷特性趋势变化明显,具有上升、下降或振荡的过程;受载荷特性的影响,运动特性变化明显,也具有上升、下降或振荡的过程。波谷滑行阶段是相邻波峰撞击阶段的过渡阶段,该时间段内飞机正在经过波谷,飞向下一个波峰,垂向过载小于或等于1g,垂向运动存在下沉趋势。首次撞击阶段中,由于初始碰撞位置位于平衡位置附近且浸没面积相对较小,飞机主要受气动力和气动力矩作用。首次碰撞阶段后,随着下沉深度和浸没面积不断上升,水动力逐渐起主要作用。

图13 波浪水面下载荷特性和运动特性变化历程Fig.13 History of load and motion characteristics in wave condition
如图13(a)所示,2.5 s 内飞机分别经历3 次波峰撞击阶段,1.32 s水平过载最大,达到2.42g,是静水面的1.09 倍;0.58 s 垂向过载最大,达到4.82g,是静水面的2.82 倍。0~0.17 s 飞机与水面发生首次撞击,水平过载变化平缓,0.01 s 垂向过载最大,达到1.26g。0.52~0.77 s 飞机经历第1 次波峰撞击阶段,0.58 s 水平过载最大,达到2.21g;0.58 s 垂向过载最大,达到4.82g,是首次撞击阶段的3.83 倍。1.07~1.53 s 飞机经历第2 次波峰撞击阶段,1.32 s 水平过载最大,达到2.42g;1.28 s 垂 向 过 载 最 大,达 到2.34g。2.32 s 后飞机经历第3 次波峰撞击阶段。波谷滑行阶段中,水平过载和垂向过载变化平缓。
如图13(b)所示,在水平载荷作用下,2.5 s内飞机的前飞速度持续减小,2.5 s 前飞速度大小为13.57 m/s,与初始前飞速度相比,下降了26.43 m/s。相比于静水面工况,波浪水面下2.5 s 前飞速度更大,二者相差1.48 m/s。0.52 s下沉速度最大,达到3.77 m/s,是初始下沉速度的4.14 倍。相比于静水面工况,波浪水面下最大下沉速度更大,二者相差0.72 m/s。与此同时,2.5 s 波浪水面工况下沉速度呈现起伏变化趋势:飞机处于波峰撞击阶段时,下沉速度呈现下降趋势;飞机处于波谷滑行阶段时,下沉速度呈现上升趋势。如图13 (c)所示,2.5 s 俯仰角降至7.43°,相比于静水面工况,波浪水面下2.5 s 俯仰角更大,二者仅差0.02°;2.5 s 波浪水面工况俯仰角呈现起伏变化趋势:飞机处于波峰撞击阶段时,俯仰角先降后升;飞机处于波谷滑行阶段时,俯仰角先升后降。1.28~2.23 s 俯仰角先升后降,1.28 s 俯仰角为8.45°,1.78 s 升至10.16°;质心下沉位移在1.36 s 升至2.54 m,1.83 s 降至2.3 m,2.23 s 再次升至2.54 m。如图13(b)所示,1.36~1.83 s 垂向速度方向为垂直向上(与Z轴正方向同向),因此,1.28~2.23 s 存在跳跃现象。由于存在下潜现象,跳跃现象并未导致飞机的运动特性变化剧烈。如图13(d)所示,随着水上迫降过程持续推进,浸没面积整体呈上升趋势,2.5 s 达到154.37 m2,是静水面的76%;下沉深度整体呈上升趋势,2.5 s 达到1.88 m,相比于静水面工况,波浪水面下2.5 s 下沉深度更小,二者相差0.1 m。根据首次撞击阶段的运动特性,飞机整体呈现下沉的运动趋势,但是俯仰角降至11°,说明飞机沿机体横轴做低头运动。与此同时,下沉深度升至0.01 m,说明飞机最低点存在垂直向上的运动趋势,所以,最大垂向过载并未出现在首次撞击阶段。
图14 展示了波浪水面下飞机底部水气两相及压力云图。0.2 s 飞机处于第1 次波谷滑行阶段,此时空气垫效应较为明显,水气混合区域已经明显形成;后机身底部存在负压区域,这说明飞机受到吸力作用。0.4 s 水平尾翼已经着水,水平尾翼底部的气垫效应较为明显。0.6 s 飞机处于第1 次波峰撞击阶段,此时吊舱底部已经着水,吊舱底部的气垫效应较为明显。0.8 s 飞机处于第2 次波谷滑行阶段,此时机翼根部已经着水。1 s 水平尾翼完全着水,空气垫效应逐渐减弱。1.53~2.5 s 飞机分别经历第3 次波谷滑行和第3 次波峰撞击阶段,空气垫效应逐渐减弱,机身底部、吊舱底部、水平尾翼和机翼大面积着水。

图14 波浪水面下飞机底部水气两相及压力云图Fig.14 Water vapor phase and pressure cloud images of aircraft bottom in wave condition
2.4 波高对水上迫降性能的影响
图15(a)对比了不同波高下最大水平过载和最大垂向过载。当波高为0.5、0.75、1 m 时,最大水平过载出现在第2 次波峰撞击阶段;当波高为1.25、1.5 m 时,最大水平过载出现在第1 次波峰撞击阶段。最大垂向过载均出现在第1 次波峰撞击阶段。对比发现,同一波峰撞击阶段内,波高越高,则最大水平过载和最大垂向过载越大。
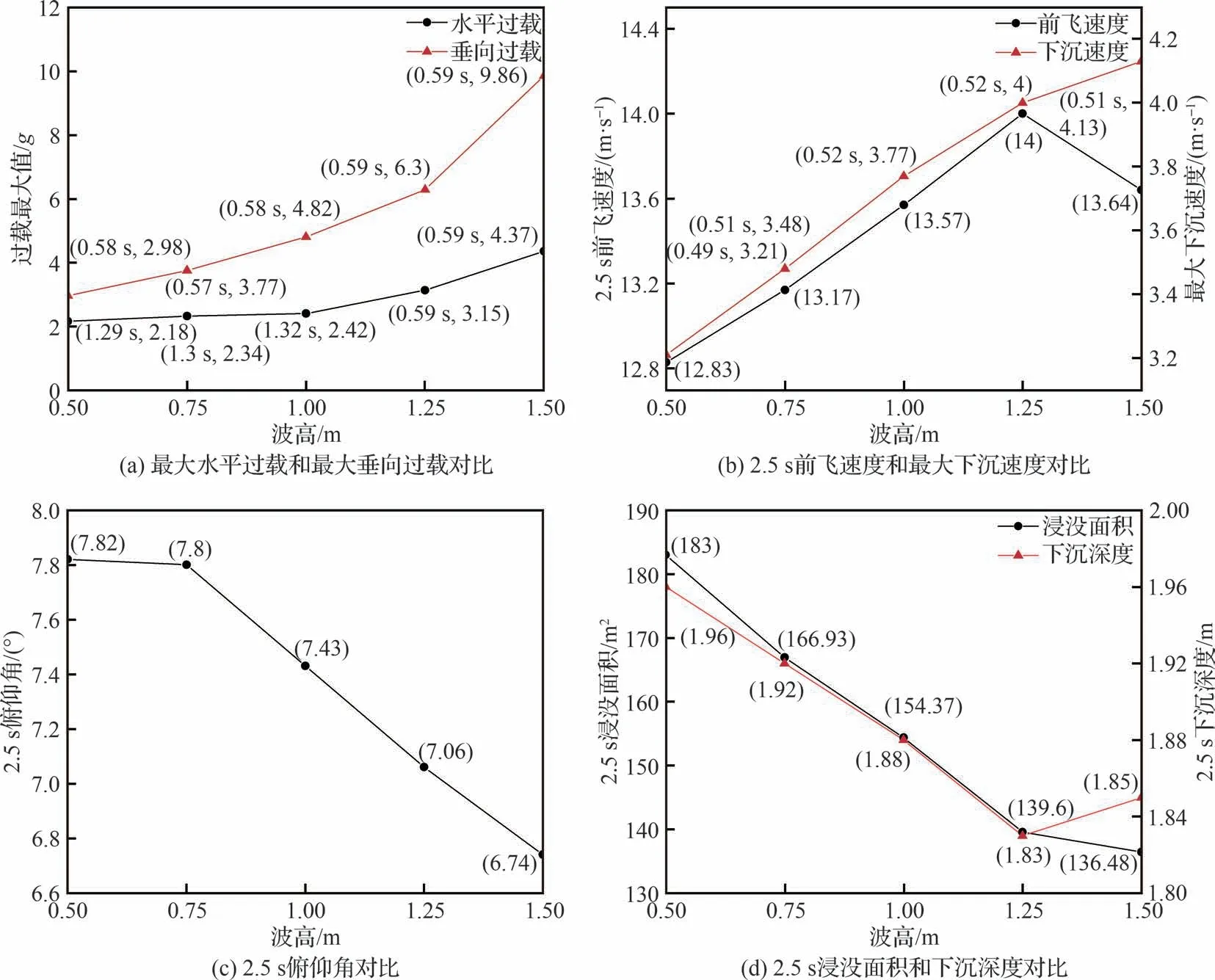
图15 不同波高下载荷特性和运动特性对比Fig.15 Comparison of load and motion characteristics in different wave height conditions
图15(b)对比了不同波高下2.5 s 前飞速度和最大下沉速度。2.5 s 前飞速度的范围在12.83~14 m/s 之间,其平均值为13.44 m/s。对比发现,波高越高,则最大下沉速度越大。图15 (c)对比了不同波高下2.5 s 俯仰角。2.5 s 俯仰角的范围在6.74°~7.82°之间,其平均值为7.37°。随着波高的增长,2.5 s 内俯仰角呈现下降趋势。
图15(d)对比了不同波高下2.5 s 内浸没面积和下沉深度。2.5 s 内浸没面积的范围在136.48~183 m2之间,其平均值为156.08 m2,且2.5 s 时飞机底部、吊舱底部、水平尾翼底部和机翼底部均着水;2.5 s 内下沉深度的范围在1.83~1.96 m 之间,其平均值为1.89 m。
就波浪要素而言,波高是垂向上的重要参数,对最大垂向过载影响显著。波高越高,波动能越大,意味着在下沉深度不断增大的过程中,飞机会承受更大的冲击能量。同时,波高越高,波陡越大,意味着同一撞击阶段中,浸没面积越大,致使飞机所受冲击压力越大。
2.5 波长对水上迫降性能的影响
图16(a)对比了不同波长下最大水平过载和最大垂向过载。当波长为25、30、35 m 时,最大水平过载出现在第2 次波峰撞击阶段;当波长为40、45 m 时,最大水平过载出现在第1 次波峰撞击阶段。当波长为25 m 时,最大垂向过载出现在第2次波峰撞击阶段,其余工况中,最大垂向过载均出现在第1 次波峰撞击阶段。最大水平过载的范围在2.42g~3.93g之间,其平均值为3.06g。对比发现,同一波峰撞击阶段内,波长越长,则最大垂向过载越小。

图16 不同波长下载荷特性和运动特性对比Fig.16 Comparison of load and motion characteristics in different wave length conditions
图16(b)对比了不同波长下2.5 s 前飞速度和最大下沉速度。2.5 s 前飞速度的范围在12.56~13.82 m/s 之间,其平均值为13.13 m/s。对比发现,波长越长,则最大下沉速度越大。图16(c)对比了不同波长下2.5 s 俯仰角。2.5 s俯仰角的范围在6.47°~9.53°之间,其平均值为8.29°。
图16(d)对比了不同波长下2.5 s 浸没面积和下沉深度。2.5 s 浸没面积的范围在129.43~154.37 m2之间,其平均值为143.58 m2,且2.5 s时飞机底部、吊舱底部、水平尾翼底部和机翼底部均着水;2.5 s 下沉深度的范围在1.77~1.96 m之间,其平均值为1.85 m。
波长越长,波陡越小,意味着相同时间下,撞击阶段次数越少。同时,相同撞击阶段内,波形更为平缓,浸没面积越小,使得飞机所受冲击压力越小。对于水平方向,前飞速度远大于下沉速度,水平方向的动能较大,飞机与波峰发生撞击后,形成大量飞溅的射流,射流的动能主要源于飞机水平方向上的动能。因此,相对于垂直方向,水平方向上的载荷特性及运动特性的变化较为平稳,波高及波长对最大水平过载的影响不太明显。
3 结 论
1) 静水面下,空气垫效应明显,撞击初段,机身底部受到吸力作用,随着碰撞过程的推进,潜水现象出现,飞机部分后机身段、水平尾翼和吊舱相继潜入水中;飞机在撞击阶段遭遇下潜现象,最大水平过载是最大垂向过载的1.3 倍。
2) 波浪水面下,当初始飞行参数与静水面工况保持一致时,最大水平过载为2.42g,是静水面的1.09 倍。最大垂向过载为4.82g,是静水面的2.82 倍。空气垫效应明显,碰撞初段,飞机受到吸力作用。潜水现象和跳跃现象相继出现,但并未对飞机的运动过程产生剧烈影响。
3) 不同波高下,当初始飞行参数和波长保持一致时,同一波峰撞击阶段内,波高越高,则最大水平过载和最大垂向过载越大。波高越高,则最大下沉速度越大;2.5 s 前飞速度不低于12.83 m/s,2.5 s 俯仰角不低于6.74°;2.5 s 浸没面积不超过183 m2,2.5 s 下沉深度不超过1.96 m。
4) 不同波长下,当初始飞行参数和波高保持一致时,同一波峰撞击阶段内,波长越长,则最大垂向过载越小;最大水平过载的范围不超过3.93g,其平均值为3.06g。波长越长,则最大下沉速度越大;2.5 s 前飞速度不低于12.56 m/s,2.5 s 俯仰角的范围不低于6.47°;2.5 s 浸没面积不超过154.37 m2,2.5 s 下沉深度不超过1.96 m。
