基于松弛极线约束的月面复杂仿射变换图像匹配方法
2024-03-01刘传凯王沼翔雷俊雄张作宇樊宽刚张济韬王晓雪潘海朗刘建国
刘传凯,王沼翔,雷俊雄,张作宇,樊宽刚,张济韬,王晓雪,潘海朗,刘建国
1.江西理工大学 电气工程与自动化学院,赣州 341000
2.北京航天飞行控制中心,北京 100194
3.航天飞行动力学技术重点实验室,北京 100194
4.南京理工大学 电子工程与光电技术学院,南京 210094
5.帝国理工学院 地球科学工程系,伦敦 SW7 2AZ
中国的玉兔月球车采用大间距移动模式进行巡视探测任务,在相邻导航站点间以倾斜视角拍摄月面(如图1 所示),站点间所拍摄的月面图像重叠区域较小,并且在尺度、旋转上具有较大的差异;此外,由于光照条件的影响,月面图像局部会存在明暗差异,从而使得站点间月面图像的匹配具有难度[1]。主要困难体现在以下3 个方面:一是倾斜视角下大距离的转变使图像同区域像素的尺度与旋转发生较大改变,同一点采用周围区域像素计算描述子存在较大差别,特征描述子的相似度降低;二是由于光照变化的影响使得图像同名特征点的梯度方向发生变化,使得特征描述子各分量发生变化,容易造成与不同名特征点之间互相错误匹配;三是站点间月面图像重叠区域较少,并且图像纹理的相似结构较多,若仅利用特征点邻域局部信息对图像进行匹配,则极易产生歧义并造成错误匹配。从而使得现有的基于特征表观描述子的配准方法配准率不高,且极易发生错配现象[2]。
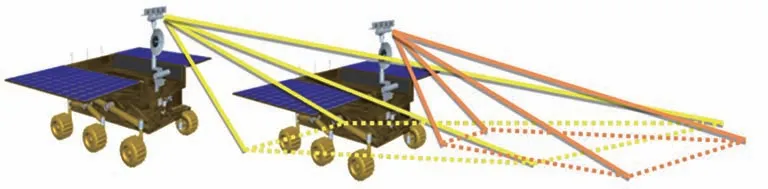
图1 月球车在相邻站点间所拍摄月面示意图Fig.1 Schematic diagram of lunar surface taken by lunar rover between adjacent stations
目前,基于特征表观描述子对尺度、旋转变换较大图像进行配准的算法中,效果较好的有Lowe 于2004 年提出的尺度不变性特征(SIFT)匹配方法[3]以及其他后续发展的变种匹配算法,包 括ASIFT、ORB、KAZE、AKAZE、SURF、BRISK 等[4-9]。SIFT 算法的基本思想是首先寻找图像中的灰度变换梯度的极值点,再以极值点为中心在其周围选择一定范围的区域对该点进行描述,通过定义不同的表征方法形成各类特征的描述子;通过描述子之间的相似关系判别2 个特征点是否为正确匹配点[10-11]。在SIFT 算法的基础上,文献[4]融合图像的仿射变换,提出了ASIFT 算法,该算法先将图像在不同的尺度空间中进行仿射变换,然后再提取SIFT 特征点进行匹配,匹配效果相比SIFT 算法有所改善,特别是处理拍摄视角变化较大的图像,效果提升较为明显。但在应对纹理单一的月面图像时,会经常出现错配率较高的情况,甚至正确匹配点远少于错配点。常用的剔除错配点的方法是RANSAC 算法[12-13],通过从匹配点中随机抽取具有最大一致性投影变换关系的匹配特征点,求解2 幅图像投影变换的基础矩阵F,过滤掉变换关系不一致的特征点,将保留匹配点对作为正确匹配点。然而对于月面图像纹理相似度高、匹配中大量错配点存在的情况,少量正确匹配点很可能淹没其中,无法求出正确的基础矩阵变换,出现正确匹配点对被剔除、保留特征点多数为错配点的情形。
期望找到一种能够辅助提升配准效果的约束,减小匹配候选点的数量,从而使得错配点大量减少。如同在双目立体视觉匹配中,利用2 个相机的相对位姿标定关系,可以求得左目图像特征点在右目图像中对应的极线,根据匹配点落在对应极线上的特点,可以将二维图像的匹配问题转化为在极线上搜索相似度最高匹配点的问题,从而实现高效匹配[14-16]。然而该方法要求预先标定2 个相机的相对位姿关系,且一般选用模板匹配等相似度比对算法寻找特征匹配关系,对于尺度和旋转变换较大的图像难以直接适用。近年来,利用深度学习进行图像匹配的算法得到快速发展,其思想是通过学习实现对图像特征的自动选择与特征对应关系的确定。其中最为典型的方法有D2Net、D2D、SuperGlue 等[17-20],但是这些方法需要利用同一站点的大量图像进行深度学习训练,因此在月面图像有限且匹配关系标定难度大的情况下,难以直接应用到相邻站点间的2 张图像匹配任务中,并且对于月面纹理较为单一的图像,且伴随复杂仿射变换情况,也很难取得好的匹配效果。
最新的传统图像配准方法主要集中在多种特征组合及引入特征周围信息约束以增强匹配效果方面,如任晶秋等[21]组合运用Harris 角点和SIFT 特征,选用Harris 算法检测出的角点邻域范围内的SIFT 特征点作为特征进行匹配,有效提高了特征点的稳定性;姜帅[22]在SURF 特征的基础上,通过分析特征点周围的灰度直方图特性将灰度信息融入到特征点匹配中,从而提高了匹配准确率;Liu 等[23]设计了多种特征组合的混合特征匹配方法,将FAST 角点和Harris 角点分别应用于无方向性区域和边缘突出区域中,提取更多有效特征,然后利用BRIEF 描述子进行相似度匹配,提高了特征点数量和匹配鲁棒性;Tang 等[24]基于分区对应的思想,先使用AKAZE 从图像中提取特征点,并使用BRIEF 计算描述符,最后利用高斯混合模型对图像进行分割,将对应匹配的特征点保留在同一分割区域中,去除不在同一区域中的错误匹配点,从而提高了匹配的准确率。上述各类方法在应对重叠区域小且尺度变换较大的图像匹配问题时,仍存在稳定性不高、适应能力不足、匹配正确率低的问题。
本文针对大尺度、旋转变换图像匹配这一难题,采用特征表观与分布相融合的思想,提出松弛极线约束的概念,基于前后站点相机的近似位姿初值和成像投影变换关系计算一个站点图像特征点在另一站点图像中近似对应的极线,将极线约束按照一定范围松弛,形成对正确特征点分布关系的约束,引入到表观描述子匹配算法中,实现基于双向松弛极线约束的图像匹配。该方法能够极大减少无效匹配点的数量和ASIFT 匹配错误的概率,避免了正确匹配点淹没在错配点中。再结合RANSAC 算法进一步消除误匹配,从而得到更精确的匹配结果。实验表明,引入松弛极线约束的仿射尺度不变性(ASIFT)匹配算法在应对大尺度、旋转变换且纹理相近图像的匹配问题中,在错配点大量存在的情况下能够极大程度上剔除错配点并且保留正确匹配点,从而使得匹配算法的正确率和有效性得到极大提升,实现匹配结果更加精准。
1 引入双向松弛极线约束的图像匹配方法
月球车在月面大间距行驶形成宽基线倾斜摄影特性,导致前后站点图像存在大尺度、旋转变化,匹配对应非常困难[25]。本节首先从尺度空间角度分析宽基线倾斜摄影的特征匹配困难,然后针对月面纹理单一引起的误匹配大量存在问题,设计了基于双向松弛极线约束的特征匹配模型。在前后站点的月面图像匹配过程中,通过成像光束投影变换计算前站点拍摄图像的特征点在后站点拍摄图像中对应的极线方程,构建双向松弛极线约束优化特征点的匹配区域,并依据约束区域构建出对应候选匹配点的KD(K-Dimension)树集合;再利用双向FLANN(Fast Library for Ap⁃proximate Nearest Neighbors)算法选取同时满足双向松弛极线约束的特征点对,从而得到初匹配特征点对集合。本文综合考虑特征点到对应极线的约束关系和特征描述子的相似度,引入双向松弛极线约束可以较好地避免相似纹理结构所造成的误匹配,并且融入双向FLANN 匹配算法和RANSAC 算法进行优化匹配,最终形成了基于双向松弛极线约束的特征匹配模型。
1.1 宽基线倾斜摄影的尺度变换分析
月面相邻站点对前方任意点拍摄的成像关系模型描述如图2 所示。宽基线条件下,倾斜摄影获得的图像,其重叠关系及尺度对比关系受到基线长度的影响,表现为一张图像投影到另一张图像的区域很小,且尺度差别较大,旋转关系也有一定的不确定性。文献[25-26]从基本的透视投影变换关系出发,考虑观测点月面法向等因素,将像素空间分辨率‖ ‖ΔXp表达为相机高度和成像光线方向的函数

图2 月球车在相邻站点对前方任意点成像示意图[25]Fig.2 Schematic diagram of lunar rover imaging at any point in front of adjacent stations
式中:Di为相机高度,即光心到月面的距离;αi为从光心指向月面点P的方向向量与月面法向量的夹角;δ为微小角度变化量。基于此对月球车在2 个不同的位置成像的像素空间分辨率比值sΔX进行计算
式中:XP1表示O1的位置,ΔXr=[ΔXr,ΔYr,ΔZr]为O2相对 于O1的偏移矢量;XP2=XP1+ΔXr表示O2的位置。图2 中给出了‖ ‖ΔXr=7 m 条件下以O1为起点的距离坐标下的空间分辨率比值SΔX的变化情况。
由图3 中可以看出,‖ ‖Xp1=7 m 的两边,SΔX的差异性很大(超过23=8),导致基于3 层尺度空间 的 表观 描 述 匹配 方 法 失效;‖Xp1‖>12.5 m 的区域内,前后站图像尺度比例<5;实际工程中‖Xp1‖>12.5 m 的区域在图像中的占比不超过15%(约为153 行像素宽度)。因此前后站图像配准的难度主要体现在重叠区域在图像中占比小、尺度差异大,再叠加月面图像纹理较为单一等特点,使得依靠表观因子的匹配方法极易发生错配,少量正确匹配点湮没于大量错配点中。为此需要引入近似几何关系,实现对初步匹配关系的确立。

图3 前方不同区域点对应图像像素的空间分辨率差异2D 侧视图[25]Fig.3 2D projection of ratio of pixel spatial resolution for points in different areas ahead
1.2 特征点近似投影与极线变换建模
本文拟采用基于特征点投影的极线约束进行错配特征点的滤除,本节对特征点投影与极线变换关系进行建模。依据2 个摄像机相对位姿的标定参数,可以较准确地估计极线,并利用极线约束进行特征匹配[27-28]。月面图像的获取是通过相机在不同站点下拍摄,行驶距离不固定且无法获取真值,因此只能求解一个站点图像中特征点在另一站点图像中的近似极线投影,以及图像中特征点与该极线的距离。本节首先推导了单摄像机模型中不同位置下拍摄2 个图像间的极线约束关系方程,然后给出了特征点到极线距离的计算方法,具体过程详述如下。

式(7)中:i1Tw∈R3×4,用i1-Tw表示其齐次坐标;K=diag(fu,fv,1)表示较正后的相机内参矩阵;fu和fv表示以像素为单位的相机焦距,令从世界坐标系到I1图像像素坐标系的变换矩阵为wTi1,则wTi1可计算为

同理,可以求出从I2图像像素坐标系到世界坐标系的变换矩阵i2Tw和从世界坐标系到I2图像像素坐标系的变换矩阵wTi2。
1.3 基于双向松弛极线约束的特征匹配模型
本节在近似极线的基础上引入一定的松弛约束限定匹配候选点的候选范围,对满足松弛极线约束的ASIFT 特征点采用描述子的相似性关系来选取匹配点对。ASIFT 特征是在SIFT 的128 维梯度极值特征的基础上引入了俯仰和偏航2 个维度的仿射变换,实现了原始图像与仿射变换图像特征匹配能力的增强[4]。本节将极线约束与仿射变换结合,进一步增强特征准确匹配能力。相应的匹配模型框架设计如下。
令待匹配的2 幅月面图像为月面图像I1和月面图像I2,月面图像I1中有Na个特征点,月面图像I2中有Nb个特征点,特征点集合分别为

依据式(12),对图像I1中的每个特征点u1i计算其相应极线;然后依据式(13),计算图像I2中每个特征点偏离对应极线的距离,并搜寻小于极线阈值di的特征点作为对应u1i待匹配的特征点集合{U2j},松弛极线约束区域如图5 所示,2 条虚线之间形成的条状区域即为极线约束区域,所有的红色特征点即为对应的待匹配特征点。di的取值可通过设置不同方向上具有一定误差范围的wTc2求得不同的极线偏移量,再根据偏移量近似估计得到。

图5 松弛极线约束区域示意图Fig.5 Schematic diagram of relaxation epipolar constraint area
当构建单向松弛极线约束时,可能存在I1图中A1点在I2图中B2点对应的极线约束区域,但I2图中B2点并不在A1点对应的极线约束区域的情况,如图6 所示,因此构造更加严格的双向极线约束,即I1图中特征点和I2图中特征点互相满足对应松弛极线约束的情况,从而增强匹配特征点间的约束力,如图6 中的C1点和C2点所示。

图6 单向与双向松弛极线约束示意图Fig.6 Schematic diagram of one-way relaxation epipolar constraint and two-way relaxation epipolar constraint
结合双向松弛极线约束和ASIFT 表观描述子相似度,构建新的图像特征匹配模型,将特征的相似度度量函数定义为:

分别表示双向松弛极线对特征有效性形成的范围约束,只有在界限以内的特征点为有效候选点。ε表示特征描述子相似性阈值,一般取0.6~0.8。μ为特征描述子的最近邻距离与次近邻距离的比值,计算图像I1中每个特征点u1i与集合{U2j}中每个特征点的ASIFT 特征描述子相似性度量,最近邻距离记为minDs,次近邻距离记为sec minDs,则μ表 示 为设定特征描述子相似性阈值ε进行筛选匹配特征点,当μ<ε时,H(u1j,u2j)>0,对应特征点对作为候选匹配特征点对。
根据上述匹配模型获得的匹配结果将能够滤除大量的无效错配点,再进一步应用基于随机抽样(RANSAC)的粗差剔除算法,从而得到优选的匹配特征点对集合。
2 基于双向松弛极线约束匹配的算法策略
基于双向松弛极线约束匹配的算法策略(Bi⁃lateral Relaxation Epipolar Constrained Match⁃ing Algorithm, BREMA)。首先通过ASIFT 算法对待匹配的2 幅月面图像分别提取特征点,其次基于双向松弛极线约束,优化特征匹配点的匹配区域,并构建基于KD 树的匹配点集合,然后使用双向FLANN 算法搜寻满足双向松弛极线约束的特征点对,从而得到初匹配特征点对集合;对于初匹配特征点对集合,再利用RANSAC 算法进一步消除误匹配,从而得到更精确的匹配结果,具体步骤如算法1 所示。
上述算法主要包含3 个关键环节,第1 个是步骤2 和步骤4,构建了双向松弛极线约束,将每个特征点对应的匹配点限定在松弛约束范围内,其中使用KD 树算法可以较好地搜索并构建出每个特征点对应的特征点集合;第2 个是步骤6,基于FLANN 算法选取满足双向松弛极线约束的特征点对,其中使用FLANN 算法可以提高匹配速度;第3 个是步骤7,基于初匹配集合,运用RANSAC 算法拟合最优基础矩阵,剔除错误匹配特征点对,从而得到最终匹配结果。该算法通过将松弛极线约束与ASIFT 匹配相结合,实现了特征匹配点的高度提纯,进一步结合RANSAC 算法实现了月球车大跨度行驶条件下对大尺度、旋转变换图像的最佳匹配效果。

算法1 BREMA 流程输入步骤1步骤2步骤3步骤4步骤5步骤6步骤7输出待匹配的2 幅月面图像对月面图像I1 和月面图像I2 分别提取图像中的ASIFT 特征点。对于图像I1 中每个特征点u1i,计算其在月面图像I2 中相对应的极线;并构建阈值为d 的松弛极线约束区域,依据式(14)计算dij,并依据KD 树算法搜寻满足dij <d 的特征点作为对应u1i 待匹配的特征点集合{U2i}。依据式(17)计算图像I1 中每个特征点u1i 与集合{U2i}中每个特征点的SIFT 特征描述子相似性度量。对于图像I2 中每个特征点u2j, 计算其在月面图像I1 中相对应的极线;并构建阈值为d 的松弛极线约束区域,依据式(15)计算dji,并依据KD 树算法搜寻满足dji <d 的特征点作为对应u2j 待匹配的特征点集合{U1j}。依据式(14)计算图像I2 中每个特征点u2j 与集合{U1j}中每个特征点的SIFT 特征描述子相似性度量。依据式(15)利用双向FLANN 算法求取满足H(u1i,u2j)>0 对应的匹配特征点对,按照上述步骤不断迭代,将得到的所有匹配特征点对作为初匹配特征点集合。运用RANSAC 算法拟合最优基础矩阵,剔除初匹配特征点集合中的错误匹配特征点对。月面图像I1 和月面图像I2 所有对应匹配特征点对
3 基于双向松弛极线约束匹配算法的优越性分析
为了从机理上说明本文算法的优越性,本节根据图7 给出的一对前后站点的月面图像匹配的典型事例,图7 的正确匹配参照图为图8,后续各个匹配结果图中绿色连线表示正确匹配点对,红色连线表示错误匹配点对。下面从4 个方面进行分析:一是分析不同阈值ε下的ASIFT 特征匹配差异性;二是分析引入RANSAC 与ASIFT 算法结合的匹配效果;三是分析双向松弛极线约束与ASIFT 算法结合的匹配效果;四是分析本文提出的BREMA 算法的匹配效果。
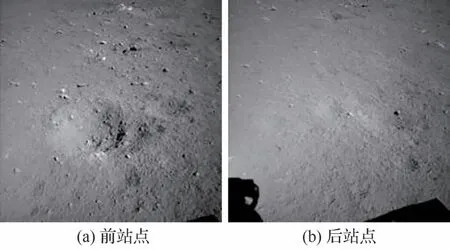
图7 实验月面图Fig.7 Experimental lunar chart
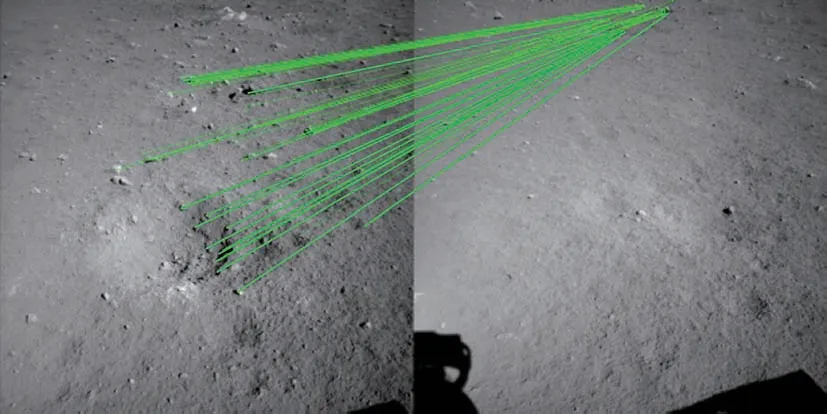
图8 正确匹配参照图Fig.8 Reference figure of correct match
情况1 不同阈值ε下的ASIFT 特征匹配差异性。设定不同的阈值ε进行筛选匹配特征点,得到匹配效果如图9 所示。从图中可以看出ε取值越大,匹配点对越多。直接使用ASIFT 匹配时,匹配结果中的正确匹配点几乎完全淹没在错配点中。

图9 情况1 匹配结果图Fig.9 Matching results in Case 1
情况2 分析引入RANSAC 的ASIFT 匹配效果。采用ASIFT 与RANSAC 算法结合并对相邻站点间月面图像进行匹配。
将RANSAC 算法分别与阈值为ε=0.8 和阈值为ε=0.9 的ASIFT 特征匹配算法结合进行分析,匹配结果如图10 所示。

图10 情况2 匹配结果图Fig.10 Matching results in Case 2
由图10 可知,由于错配点数量太多,正确匹配点数量有限且被完全淹没在错配点中,采用随机抽样难以找到正确的最大一致性拟合变换关系(基础矩阵投影变换),受大量错配点影响使得正确的匹配点几乎没法保留。
情况3 分析双向松弛极线约束与ASIFT算法结合的匹配效果。将双向松弛极线约束与ASIFT 算法结合并对相邻站点间月面图像进行匹配。
将双向松弛极线约束分别与阈值为ε=0.8和阈值为ε=0.9 的ASIFT 特征匹配算法结合进行分析,匹配结果如图11 所示。
由图11 可知,引入双向松弛极线约束后,尽管错配点未能全部剔除,但是正确匹配点被大量保留,从而使得匹配结果的进一步提纯工作成为可能。由此可见,双向松弛极线约束在剔除错配点和尽可能保留正确匹配点的效果方面取得了很大改善。
另外需要说明:松弛极线约束的阈值设置在一定程度上影响着匹配效果的好坏,由于月球车本身位置信息有一定的误差,特征点往往不在对应的极线上,因此需要设置极线阈值形成松弛极线约束。在不同位置误差条件下,设置不同的极线阈值往往导致匹配准确率的变化。为了进一步分析不同松弛阈值的设置对但匹配效果的影响,对不同阈值下的匹配正确率进行仿真如图12 所示。以图7 中(a)、(b)组图为例,基于前后站站点的位置信息,设定不同的位置误差(位置误差一般在0%~10%)和不同的极线阈值(0~100 pixel),计算不同极线阈值随位置误差变化情况下图像特征匹配的正确率变化结果。

图12 不同极线阈值在位置误差变化下对应匹配准确率结果图Fig.12 Matching accuracy corresponding to different pole-line thresholds when position error changes
由图12 可以看出,极线阈值设置为0 pixel时,无论位置误差变化多少,该条件下月面图像匹配正确率始终为0%,这是因为前后站点的位置信息原本就有一定的偏差,特征点几乎都不在对应的极线上,极线阈值设置为0 pixel 几乎得不到正确匹配点。当极线阈值从0 pixel 逐渐增大时,匹配正确率也逐渐增大,极线阈值设置到10~20 pixel 之间时,正确率达到峰值;随后当极线阈值再增大,正确率呈现高台缓降的坡面趋势;后续阈值增大到接近100 pixel 时,曲面逐渐平坦,但对应匹配正确率较低,说明极线阈值不宜过大,否则导致松弛约束无效。其次,相同极线阈值条件下,不同的位置误差会对匹配正确率产生波动影响,极线阈值设置到大概80 pixel 以上的时候,正确率随位置误差变化的波动较为平缓,但正确率整体均较低;另外,虽然极线阈值设置到10~20 pixel 时,正确率随位置误差变化的波动较为明显,但整体匹配正确率值相对较高。因此,极线阈值设置在10~20 pixel 之间,可以获得相对较好的匹配效果。
情况4 分析BREMA 算法的匹配效果。在情况4 的对站点间月面图像进行双向松弛极线约束匹配后,再进一步使用RANSAC 算法剔除错误匹配特征点对,得到最终匹配效果如图13所示。

图13 情况4 匹配结果图Fig.13 Matching results in Case 4
从图13 可以看出,基于双向松弛极线约束利用FLANN 算法进行ASIFT 特征匹配,剔除大量错配点后再应用RANSAC 算法进行匹配结果提纯,能够得到更优的匹配结果,一方面保留了淹没在错配点中的正确匹配点,另一方面也实现了对大量无效错配点的逐步剔除,保证了匹配的正确率和精确度。
4 仿真校验
本节采用玉兔二号月球车在多个导航站点拍摄的20 组(40 张)前后站点的月面图像进行匹配比对实验。利用不同的特征匹配算法对这些图像进行匹配,通过本文方法与现有方法的匹配结果比对,验证本文算法在大尺度、旋转变换月面图像匹配中的优越性。
对月面图像分别采用ASIFT 结合RANSAC算 法、改 进 的ORB 算 法[23]、改 进 的AKAZE 算法[24]、以及本文提出的BREMA 算法进行实验比较,图14 中给出5 组比对结果。

图14 匹配结果对比Fig.14 Comparison of matching results
从上述5组结果可以看出,ASIFT+RANSAC算法在处理月面纹理相近且大量错配点存在的情况时,很难从大量错配点中找出和保留正确的匹配点;改进的ORB 算法[23]和改进的AKAZE 算法[24]总体匹配效果有所改进,但依然存在较多错误匹配特征点对;本文提出的BREMA 匹配算法可以借助于双向松弛极线的约束剔除大量错配点,再结合RANSAC 算法显然实现了准确率更高的匹配效果。
对20 组(40 张)月面图像分别采用ASIFT 算法、ASIFT-RANSAC 算 法、BREMA 匹 配 算 法进行对比实验,各个算法的匹配准确率和正确匹配点对的数量比对结果如图15 所示。本文的正确匹配点对的数量是在计算机估计的基础上,通过人工校核得到。

图15 BREMA、ASIFT、ASIFT-RANSAC 算法的匹配准确率和正确匹配特征点数量对比Fig.15 Comparison of matching accuracy and number of correct matching of BREMA, ASIFT, and ASIFT combined with RANSAC
从 图15(a)中可以看出,对于20 站图像匹配,BREMA 算法的匹配准确率均在50%以上,并且均大于ASIFT-RANSAC 的匹配准确率,即使当ASIFT-RANSAC 匹配准确率很低的时候,BREMA 算法也能保持较高准确率。结合图14和图15 可以看出,BREMA 的正确匹配点数量几乎和ASIFT 原始匹配(未剔除)得到的正确匹配点数量相当,表明本文所建匹配模型确实能够很好地保留正确匹配点;而ASIFT-RANSAC 保留的正确匹配特征点数较ASIFT 匹配明显减少,这说明当大量错配点存在时,RANSAC 算法剔除错配点的同时也会剔除很多正确匹配点,从而导致正确匹配特征点数量也相应减少较多,使得正确匹配特征点数量的准确率也未能提高(与图15(a)结合分析)。
另外需要注意的是,BREMA 算法在某些图像匹配时,获得了比ASIFT 原始匹配更多的正确匹配点,如图16 中的黑圈标注的4 个站点处,出现匹配点多于ASIFT 原始匹配的情况,这是因为BREMA 利用松弛极线提供了特征匹配前的特征候选区域约束,使得之前可能匹配错误的点从候选区域中找到了正确的匹配点,从而使得正确匹配点数量增加;而在没有松弛极线约束条件下,ASIFT 在全图中搜寻匹配点,若仅依据SIFT 特征描述子相似性度量搜寻最优匹配点也容易造成误匹配。

图16 BREMA 算法匹配特征点多于ASIFT 原始匹配点数量Fig.16 BREMA algorithm matches more feature points than original ASIFT
为了验证BREMA 算法相对其他SIFT 的同类变种算法的性能优势,对20 组(40 张)月面图像分别采用BREMA 算法、AKAZE 算法、KAZE 算法、BRISK 算法、ORB 算法、SIFT 算法、改进的ORB 算法[23]、改进的AKAZE 算法[24]进行对比实验,各个算法匹配准确率结果如图17所示。

图17 BREMA 算法与其他算法匹配准确率对比Fig.17 Comparison of matching accuracy between BREMA algorithm and other algorithms
由图17 可以看出,本文提出的BREMA 算法的匹配效果远好于其他各类算法;利用20 站的图像匹配结果对算法匹配的平均准确率进行比较,结果如图18 所示。可见BREMA 算法平均准确率远高于其他几类算法。

图18 各算法总体平均匹配准确率对比图Fig.18 Comparison of average matching accuracy of algorithms
5 结 论
本文针对月球车大间距行进过程中拍摄的月面图像重叠度较低且尺度、旋转、光照等方面存在很大差异情况下的匹配难题,提出了基于双向松弛极线约束的月球表面图像特征匹配算法,将极线约束这一特性引入到大量错配关系存在的特征匹配中,极大减小了特征匹配点选择的候选区域。在此基础上结合表观相似性和松弛极线约束构造了新的特征匹配相似度度量模型,实现了先验信息的有效利用和特征匹配度的联合度量,从而极大减少因相似纹理结构引起的无效匹配特征点对,实现了有效特征点的最大程度保留和错配点的逐步剔除,解决了正确匹配点淹没于错配点中导致无法正确匹配的难题。最后通过仿真实验验证了本文所述模型的有效性,这为月球车大间距探测模式下表面图像的高准确率自动配准问题提供了新途径,极大改善了匹配效果,同时为月球车大间距行进中的自动视觉定位提供了有力支撑,也为未来月面长距离行驶中的大量图像自主匹配与定位提供了基础条件。
致 谢
论文在北京航天飞行控制中心空间遥操作团队的通力协助下得以顺利完成,在此深表感谢。
