电磁散射测试的可重构绳系并联支撑机构
2024-03-01柳汀林麒刘震王晓光吴惠松许勇刚
柳汀,林麒,*,刘震,王晓光,吴惠松,许勇刚
1.厦门大学 航空航天学院,厦门 361102
2.电磁散射国家重点实验室,上海 200438
在微波暗室测试目标物电磁散射特性时,目标支撑机构作为一种姿态控制机构,既要能将被测目标物架设在空间的静区内,又要能根据不同测试要求调节目标物姿态[1]。
为获得准确可靠的测试数据,人们设计和开发了不同的目标支撑机构,并对其机械性能和电磁散射特性做了大量研究工作。目前广泛使用的传统支架为低散射金属支架或泡沫转台支架。Berrie 等[2]、Dallmann 等[3]和Baggett 等[4]分别对泡沫转台支架进行了有关分析和优化设计。Jiao等[5]则设计了一种基于仿生结构的轻型化金属支架,用于支撑飞行器目标,并分析验证了其静态和动态下的力学性能以及电磁散射特性。安大卫等[6]通过分析和参数优化,设计了一种非对称截面的低散射金属支架。唐海正等[7]提出了一种卵形结构的金属支架设计方案。
由于目标物空中飞行姿态千变万化,电磁散射测试时需利用机构支撑被测目标物模拟其真实飞行姿态。现有传统的目标支撑机构能够实现目标物的全偏航角扫描,但实现俯仰角变化能力有限,滚转角暂未涉及。依靠现有目标支撑机构很难同时满足被测目标物各种姿态下(如全滚转姿态等)电磁散射特性测试需求。
近半个世纪以来,绳系并联支撑机构以其优异的性能受到广泛关注[8-9],在众多领域得到应用[10-23]。但是受机构构型影响,动平台姿态难以实现大角度旋转变化,尤其是全角度旋转。为克服这一困难,扩展工程应用范围,很多学者开展了可重构绳系并联支撑机构设计和应用研究[24-26]。但是,有关于采用绳系并联支撑机构作为电磁散射测试目标支撑的研究报道较少。
本文提出一种双回转机构的重构策略,构建了8 根绳索驱动的可重构绳系并联支撑机构,以实现目标物全滚转和其他姿态耦合等运动控制,并分析和论证了绳系的力学性能和低散射特性以及绳系支撑下目标物的电磁散射特性。
1 电磁散射测试系统
电磁散射测试系统主要由测试天线、矢量网络分析仪、目标物、支撑机构及其控制系统等组成。进行电磁散射测试时,被测目标物由支撑机构架设于静区内(见图1)。静区是微波暗室内一个接近“自由空间”的无回波区,测试时通过改变目标物的方位以适应天线发出的电磁波的扫描,为二维成像、扫频测试提供条件。

图1 电磁散射测试系统示意图Fig.1 Schematic diagram of electromagnetic scattering test system
如图1 所示,本文电磁散射测试的目标物做全滚转运动,其轴线方向为OX方向,目标物绕OX轴旋转,其俯仰和偏航运动分别绕OY轴和OZ轴旋转。观测方向(天线的发射和接收方向)则是沿OY方向,即从模型侧向进行观测。根据电磁散射测试需求,只须改变目标物在静区内的3 个姿态角,不需改变目标物位置。
传统的目标支撑机构调整姿态的能力不同,具体见表1。

表1 典型目标支撑机构姿态调控范围Table 1 Attitude control range of typical target support mechanism
由表1 可知,3 种传统目标支撑机构均能实现被测目标偏航角0°~360°的旋转。其中,2 号低散射金属支架和3 号WH23F 测试转台还能够调整俯仰角,调整范围分别为0°~45°和−60°~60°。泡沫转台支架和金属支架等目标支撑机构经过低散射设计,可以忽略自身散射性能对测试场的影响,但目标物安放在支撑机构上后,二者的回波会发生互相干扰,影响测试工作。不仅如此,对于更加复杂的测试任务,如一些目标物的识别需采取全滚转扫描测试、全滚转和俯仰组合姿态测试以及全滚转和偏航组合姿态测试等方式时,泡沫转台支架等常规的目标支撑机构就难以完成了。因此,设计功能性更强的目标支撑机构成为研究人员关注的研究方向。
绳系并联支撑机构具有结构简单、工作空间大、刚度高等优点,可用于支撑不同尺寸和质量的缩比模型或全尺寸模型。本文采用绳系并联支撑机构作为目标支撑机构,设计了一个8 根绳索牵引的可重构绳系并联支撑机构(见图1)。图1 所示的支撑机构由2 个共轴线且转动平面平行的转盘机构、牵引绳系以及安装于转盘上的绳索驱动机构(滚珠丝杠模组)组成,见图2。左右两侧的转盘为对称结构,为方便观察,隐藏左侧转盘的回转轴,只显示右侧转盘的回转轴。两转盘相距6 m,转盘直径均为6 m,其轴线距离地面4 m。

图2 可重构绳系并联支撑机构设计图Fig.2 Design diagram of reconfigurable wire-driven parallel support mechanism
两转盘的转轴由地面支座支撑。牵引绳系分为左右2 组(每组4 根牵引绳),从两侧牵引模型。绳的一端固连于目标物,另一端分别通过安装于2 个转盘上的滑轮后再由滚珠丝杠模组改变其长度及张紧程度。支撑机构通过左右2 套回转驱动装置控制两转盘做同轴转动,实现目标物的全滚转及各种位姿的变化。
可重构机构具有多构态和多活动度变化的特点,可以满足多任务、工况与多功能的要求,达到“一机多用”、节约资源与降低能耗的目的[29]。文中的绳系并联支撑机构是一种并联机器人系统,所谓重构,是指绳牵引并联机构的机械构件,包括支架、牵引绳索的滚珠丝杠模组与滑轮等部件的运动导致绳系结构在空间的变化。图2 中,当转盘机构转动时,绳索的方位随转盘上滑轮的空间位置变化而改变,绳系的空间构型也随之变化,绳系结构实现重构。此外,可通过拉力传感器测量绳索拉力,通过编码器测量转盘回转角度,通过内置微型惯性单元或外部机器视觉测量目标姿态。
当转盘机构静止,或转盘被锁定时,调整牵引绳长度也可有限地调整被测目标物的俯仰、偏航及滚转姿态,但无法实现全滚转运动。
运动学、静力学性能和工作空间是评价绳系并联支撑机构的重要依据,也是运动控制研究的基础。为确定设计参数,验证设计方案的可行性,对所述可重构绳系并联支撑机构的运动学、静力学和工作空间进行建模和分析。
2 可重构绳系并联支撑机构理论基础
为方便建模,建立全局静坐标系OXYZ,在此基础上,再建立目标物局部动坐标系PXpYpZp和转盘机构局部动坐标系QXqYqZq。
全局静坐标系OXYZ建立在地面上,原点O设置于静区的正下方。被测目标和转盘机构如图3 所示。

图3 可重构绳系并联支撑机构示意图Fig.3 Diagram of reconfigurable wire-driven parallel support mechanism
图中转盘机构局部动坐标系QXqYqZq设置于左侧转盘上,其原点Q为左侧转盘的转动中心。右侧转盘与左侧转盘保持同步运动,故将两转盘视为一个刚体。目标物局部动坐标系PXpYpZp的原点P取为被测目标物质心。在全局静坐标系OXYZ中,当目标物各姿态角均为零时,其机身轴线(或长轴)与静坐标系的OX轴平行,也与两转盘轴线平行。
图3 中,每根牵引绳索的一端固连于被测目标物上的锚点Pi(i=1,2,…,8),另一端为转盘上导向滑轮出绳点Qi(i=1,2,…,8),转盘转动时,Qi点随之运动。当绳系结构和被测目标物与转盘无相对运动时,在绳索拉力作用下,目标物上的Pi点也随之转动相应的角度,当两转盘机构同步旋转一周时,被测目标物也完成360°全滚转运动。
与此同时,由于8 根绳的运动相对独立,均有各自的驱动组件,还可以通过改变各绳索伸长量调整被测目标物的位置和姿态,实现被测目标物6 个自由度的灵活变化。
2.1 机构运动学模型
为便于分析,基于几何学方法对运动学进行描述,如图4 所示。其中,Pi和Qi分别为动坐标系PXpYpZp和QXqYqZq中的坐标点。

图4 绳系支撑结构运动学关系示意图Fig.4 Kinematic schematic diagram of wire-driven paral⁃lel support mechanism
式中:XP=[XP,YP,ZP]T、XQ=[XQ,YQ,ZQ]T分别为静坐标系OXYZ下2 个动坐标系的原点P、原点Q的位置向量;P O R为动坐标系PXpYpZp到静坐标系OXYZ的旋转变换矩阵;ui为第i根绳的单位矢量,则Li=Liui。根据设计方案,滚转丝杠模组和滑轮组件等在转盘机构上的位置相对固定,随同转盘机构一起绕QXq轴旋转;QO R为转盘转轴绕QXq轴的定轴旋转矩阵。在全局静坐标系OXYZ中,这2 个矩阵具体可表示为
式中:θ、ψ、φ分别为被测目标物绕全局坐标系OXYZ中OX、OY、OZ3 个轴旋转的滚转角、俯仰角和偏航角;γ+、γ−分别为位于OX轴正方向和负方向的2 个转盘的旋转角度。
由式(1)可以得到式(2)所示绳长与转盘机构位置和目标物位姿之间的关系。对于8 根绳索的可重构绳系并联支撑机构,给定2 个转盘机构位置和目标物位姿,8 根绳索的长度可唯一确定,并可求得可重构绳系并联支撑机构的雅克比矩阵J,进一步,可得到绳索长度变化速度与目标物运动速度和转盘回转速度之间的映射关系为

2.2 机构静力学
由于柔性绳索只能承受拉力,不能承受压力,因此,在被测目标物工作空间内不仅要满足运动学关系,还要同时满足力平衡条件,需要对其进行静力学建模和分析。
根据虚功原理,可知文中的可重构绳系并联支撑机构的虚功方程为
式中:T为8 根绳索的拉力向量;wscr为作用在被测目标物上的力螺旋矢量;Ftor=[τ1τ2…τ8]T为驱动转盘、8 套绳索及滑轮组件旋转的转矩向量。

式 中:Jscr为6×8 的 矩 阵;Jtor为8×8 的 对 角 方阵。根据静平衡条件,对于给定的力螺旋矢量、被测目标物的位姿、被测目标物锚点位置和转盘机构出绳点初始位置,当绳拉力满足式(11)时,根据力闭合约束条件对绳拉力进行优化求解:
2.3 机构工作空间
力闭合工作空间是一种能够快速有效求解的工作空间[25]。由于绳索只可受拉不能受压,基于绳索力闭合约束条件,如果绳索的拉力能够完全支撑被测目标物保持姿态稳定,即8 根绳索的拉力均大于零,则可近似求解该工作空间。
对方程JTscrT=wscr两边同时右乘结构矩阵Jscr的伪逆矩阵J+sec,并引入单位矩阵I和绳系内力系数λ,可得
在全局静坐标系下,当式(16)成立时,每根绳索的拉力必定为正值,满足力闭合工作空间的存在条件。对于本文提出的8绳牵引6自由度冗余约束绳系并联机器人而言,所求解的工作空间还需要考虑目标物的外形特点,可参考文献[23],根据目标物信息进一步判断。
蒙特卡罗方法是计算机器人工作空间常用的简单有效的数值计算方法,属于概率统计的范畴,是一种比较实用的工作空间分析方法。蒙特卡罗法特别适用于计算受复杂约束的复杂机器人的工作空间,这些机器人具有许多自由度,在运动学上甚至是冗余的,采用蒙特卡罗方法计算本文所述绳牵引并联机器人的工作空间,可以有效降低求解难度[30-31]。
本文基于蒙特卡罗法求解策略,对该绳系并联支撑机构的力闭合工作空间进行求解。流程如图5 所示。

图5 绳系支撑工作空间求解流程图Fig.5 Flow chart of workspace solution of wire-driven parallel support mechanism
蒙特卡罗法求解绳牵引并联机构工作空间的基本思想可以描述为:在一定范围内随机挑选大量的动平台参考点的位姿,对这些位姿进行逐一判断,最后得到符合判定条件的全部参考点的集合。这里的判定条件即为考虑绳索是否与被测模型发生干涉的力闭合条件,待全部判定完毕后,输出工作空间即可。
3 理论计算与分析
3.1 模型悬挂方案
根据电磁散射测试验证需要,且不失一般性,本文选择的测试目标物为飞机模型。根据某单位研究实际需求,设置模型质量为50 kg。图6为目标物的悬挂示意图,θ、ψ和φ分别为飞机模型的滚转、俯仰和偏航3 个姿态角。

图6 目标物飞机模型悬挂点示意图Fig.6 Schematic diagram of suspension point of target airplane model
定义模型的零姿态为:机身轴线与OX轴平行,各姿态角均为0°,且质心位于图3 的两转盘公共轴线中央位置(亦即暗室静区中心),在静坐标系里的坐标值为(0,0,−4)。
表2 为本文设计的一种绳系结构方案。参考图3 和图4,在静坐标系OXYZ里,当模型处于零姿态时,2 个动坐标系的原点Q和P分别设为XP=(0,0,−4)和XQ=(3,0,−4),各Pi点和Qi点的坐标参数分别如表2 所示(坐标值单位:m)。本文将针对该方案进行研究。
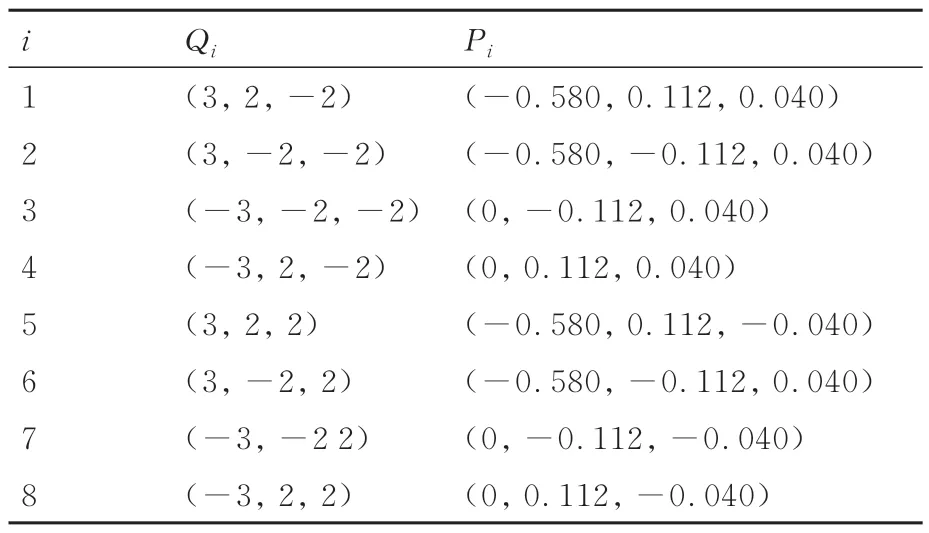
表2 目标物绳系支撑结构方案设计参数Table 2 Design parameters of wire⁃driven parallel support mechanism
根据设计方案,在回转驱动装置驱动下,2 个转盘机构同步转动,能够实现被测目标物滚转姿态角在360°内连续变化。在此基础上,依据绳系并联支撑机构特点,调节8 根绳的绳长,还可以同时实现被测目标物俯仰、偏航2 个姿态角的连续变化。
在被测目标物做全滚转运动的测量过程中,主要存在2 种组合姿态,第1 种是被测目标物的偏航角(或俯仰角)保持为0°,改变俯仰角(或偏航角);第2 种是保持被测目标物的俯仰角(或偏航角)为某一不为零的角度不变,改变偏航角(或俯仰角)。本文重点关注被测目标物在这2 种组合姿态改变过程中绳长和绳拉力的变化。
3.2 工作空间分析
根据电磁散射测试对目标物支撑机构的要求,其工作空间主要指被测目标物3 个姿态角的变化范围,无需考虑其位移变化。本文的可重构绳系并联支撑机构在转盘机构锁定时,仅控制绳长和绳拉力,即能够实现目标物俯仰、偏航、滚转姿态在一定角度范围内的连续变化;若仅驱动转盘机构转动,滚转姿态角运动范围可达0°~360°。
下面假定转盘机构锁定,仅对绳系机构驱动下目标物3 个姿态角的变化范围进行分析。为减少计算量,仅计算图3 的绳系结构下目标物3 个姿态角在0°~90°范围内的工作空间。其他绳系结构方案的工作空间同理计算即可。
采用第2.3 节所述工作空间求解方法,得到该机构的工作空间,如图7 所示。其中,图7(a)为绳系并联支撑机构三维工作空间,图7 (b)、图7 (c)和图7(d)分别表示图7(a)在不同方向的二维投影。
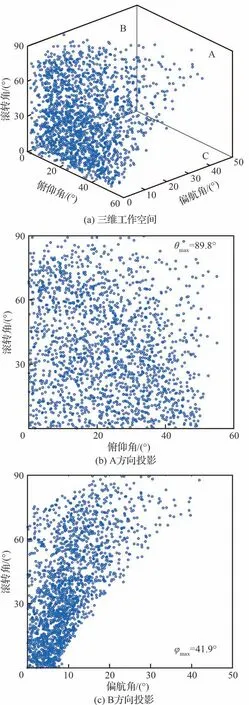

图7 工作空间分析Fig.7 Workspace analysis result
由图7 可以看出,目标物的3 个姿态角最大值分 别 为θmax=89.8°,ψmax=55.1°,φmax=41.9°。对比表1 可知,泡沫转台支架、低散射金属支架、WH23F 测试转台均不能改变滚转姿态,而可重构绳系并联支撑机构不依靠转盘旋转,仅在绳系结构驱动下,即可实现滚转角0°~89.8°扫描,若由转盘驱动,则能实现滚转角0°~360°扫描。不仅如此,绳系支撑机构还能同时改变俯仰姿态和偏航姿态。
泡沫转台支架不具备俯仰姿态扫描能力。与低散射金属支架相比,本文的绳系支撑机构使得对目标物俯仰姿态扫描范围提高了22%;在0°~90°扫描范围内,相较WH23F 测试转台,本文机构对目标物的俯仰姿态扫描范围仅降低了8%。若将被测目标物机身轴线设置为与静坐标系的OX轴垂直,并改变牵引绳在模型上的锚点,本文的机构便具备实现全俯仰角旋转,即俯仰姿态角在0°~360°范围内变化的能力。这时,再将被测目标物绕机身轴线旋转90°,并改变牵引绳在模型上的锚点,本文的机构还可实现偏航角0°~360°扫描。篇幅所限,本文仅针对能满足全滚转扫描测试要求的可重构绳系并联支撑机构进行讨论。
综上所述,从工作空间能力方面可以验证,图3 的设计方案具备三维转动自由度的调整能力,具有作为一种电磁散射测试目标物支撑机构的可行性。
3.3 绳长变化分析
对于绳系并联支撑机构,运动学正解求解困难,逆解求解较为容易。所谓求逆解即已知被测目标物的位姿求解所有绳长。
根据第3.2 小节分析得到设计方案的力闭合工作空间,采用逆运动学求解方法,分析工作空间内,即最大俯仰角和偏航角范围内(取俯仰角55°、偏航角40°),回转驱动装置驱动下,转盘做360°全滚转运动时上述2 种组合姿态下的绳长变化。其中分别是4 个不同的俯仰角与0°偏航角的组合,以及55°俯仰角与4 个不同的偏航角的组合。根据式(2)计算得到目标物在上述2 种姿态组合下的绳长变化分别如图8、图9 所示。

图8 φ=0° (ψ=10°, 25°, 40°, 55°)绳长随滚转角变化Fig.8 Variation of wire lengths with roll changing at φ=0° (ψ=10°, 25°, 40°, 55°)

图9 ψ=55° (φ=10°, 20°, 30°, 40°)绳长随滚转角变化Fig.9 Variation of wire lengths with roll changing at ψ=55° (φ=10°, 20°, 30°, 40°)
图8 为目标物做第1 种组合姿态运动时的绳长变化规律,即各小图对应目标物偏航角保持φ=0°,俯仰角ψ分别为10°、25°、40°、55°,滚转角从0°~360°时各绳长的变化情况。
由图8 可知,当俯仰角改变时,目标物在全滚转运动过程中牵引绳的绳长将发生改变,且绳长变化随俯仰角增大而增大。其中绳1、绳2、绳5 和绳6 的绳长变化较大。俯仰角ψ=55°时,这4 根绳长最大变化接近0.8 m,ψ=10°时,最大变化约0.2 m;相对而言,绳3、绳4、绳7 和绳8 的绳长变化较小,ψ=55°时,这4 根绳长最大变化接近0.2 m,ψ=10°时,它们的最大变化不足0.1 m。
图9 为目标物做全滚转结合第2 种组合姿态运动时的绳长变化规律,即各小图表示目标物保持ψ=55°不变、偏航角φ分别为10°、20°、30°、40°,滚转角从0°~360°时绳长的变化规律。
图9 为保持最大俯仰角和某一偏航角,目标物在全滚转运动过程中牵引绳绳长的变化情况。绳1、绳2、绳5 和绳6 的绳长变化最大约0.9 m,绳3、绳4、绳7 和绳8 的绳长变化最大约0.2 m。单根绳来看,偏航角φ=10°逐渐增大到φ=40°时绳长变化较小,绳1 和绳6 最大绳长变化约0.2 m,绳2 和绳5 最大绳长变化约0.1 m,其他4 根绳最大绳长变化不足0.1 m。
本文研究的是目标物全滚转的情况,如上所述,如果改变悬挂方式,可以进行目标物全俯仰或全偏航运动的测试。即可根据实际测试需求设计被测目标物的绳系悬挂结构方案,在测试过程中利用绳牵引并联机器人技术调整绳长来改变被测物的姿态,以达到测试要求。
3.4 绳拉力变化分析
本文的可重构绳系并联支撑机构作为微波暗室的被测目标物悬挂支撑,不仅需要对其设计绳系结构方案,还需要考核其机构的结构强度,根据机构的力学性能要求选择牵引绳。其中,机构在工作状态下各牵引绳的受力情况是最重要的。针对上述目标物姿态运动情况对牵引绳的拉力进行分析,即在目标物做360°全滚转运动时的2 种组合姿态(第1 种为偏航角φ=0°时,俯仰角ψ=10°、25°、40°、55°,和第2 种为俯仰角ψ=55°时,偏航角φ=10°、20°、30°、40°)下,各绳的受力情况。
在满足静力平衡条件前提下求解绳拉力。根据式(13),得到2 种组合姿态变化下的绳拉力计算结果。其中,图10 为与图8 相对应的第1 种组合姿态变化时的绳拉力变化,图11 为与图9 相对应的第2 种组合姿态变化时的绳拉力变化。

图10 φ=0° (ψ=10°, 25°, 40°, 55°)绳拉力随滚转角变化Fig.10 Variation of wire tensions with roll changing at φ=0° (ψ=10°, 25°, 40°, 55°)
整体来看,第1 种组合姿态运动过程中,每根绳的最大拉力均不足900 N(约为目标物重力的1.8 倍);第2 种组合姿态运动过程中,绳1、绳2、绳5 和绳6 的最大绳拉力接近900 N,而绳3、绳4、绳7 和绳8 的最大绳拉力不足600 N(约为重力的1.2 倍)。从物理意义上理解,忽略可重构过程的能量消耗,绳拉力是绳系并联支撑机构能量消耗的一个指标,牵引绳克服重力做功越多,能量消耗越大,绳拉力变化越大。以单根绳拉力水平接近900 N(即1.8 倍重力)为目标,安全系数可取3,绳破断拉力应为2 700 N,可将此数值作为依据选取牵引绳。
综上所述,当绳系结构给定,被测目标物质量已知,可根据静力学分析结果得到绳系的受力分布与变化规律,确定牵引绳自身参数,选择合适的牵引绳。其他绳系支撑方案可参照设计。
4 电磁散射测试验证分析
本文电磁散射测试工作在厦门大学航空航天学院的微波暗室进行。该微波暗室在本试验的测试频段内满足近似远场的测量要求。微波暗室长高宽分别为6 m×6 m×6 m,静区位于暗室的正中央,大小约为0.6 m×0.6 m×0.6 m。为尽量降低绳系对被测目标物电磁特性测量的影响,转盘机构架设在左右墙体上,可重构绳系并联支撑机构除8 根牵引绳的绳系结构外,其他机构或组件均设置在远离静区的暗室两侧。根据电磁散射测试验证需要,且不失一般性,采用3D 打印成型并在表面喷涂一层金属漆的ABS 塑料作为测试对象。图12 为所制作的图6 所示飞机模型的缩比模型示意图。

图12 目标物飞机缩比模型示意图Fig.12 Schematic diagram of the scaled model of the target airplane
鉴于电磁散射试验对支撑的要求,绳系的影响应尽可能地低。显然,金属绳是不能用的。综合考虑电磁性能和力学性能,本文选用芳纶纤维的凯夫拉(Kevlar)绳。凯夫拉芳纶纤维是一种高科技合成纤维,具有超高强度、高模量和耐高温、耐酸耐碱、重量轻等优良性能,其比强度是钢丝的5~6 倍。凯夫拉芳纶纤维本身不导电,在1~10 GHz范围内,当纤维方向垂直排列时,介电常数ε=3.3,损耗正切角tanδ=0.010;当纤维方向水平排列时,介电常数ε=3.7,损耗正切角tanδ=0.013,均具有优异的雷达透波性能[32]。并且经编织后的凯夫拉绳的力学性能也很好,因此用途广泛。
综上,本文选择12 股编织的直径2 mm 的凯夫拉绳作为牵引绳,对其作为目标物支撑的电磁特性进行专门研究。
4.1 目标物支撑的低散射特性测试
电磁散射测试时,目标物支撑机构的回波水平是重要影响因素之一。为降低可重构绳系并联支撑机构的回波水平,可通过涂覆吸波涂层、利用吸波尖劈和设置吸波挡板消除支撑支架部件对电磁散射的影响。除此之外,凯夫拉绳构成的绳系将出现在静区中,必须考虑其电磁散射特性。
采用矢量网络分析仪Agilent N5224A 测试电磁散射特性,收发天线为标准增益角锥喇叭天线,工作频率为8~12 GHz。通过在静区布置8 绳绳系,采用扫频测试方法,分别测试该微波暗室的目标物支撑(包括有绳系与泡沫转台、无绳系与泡沫转台)的电磁散射特性,结果如图13 所示。
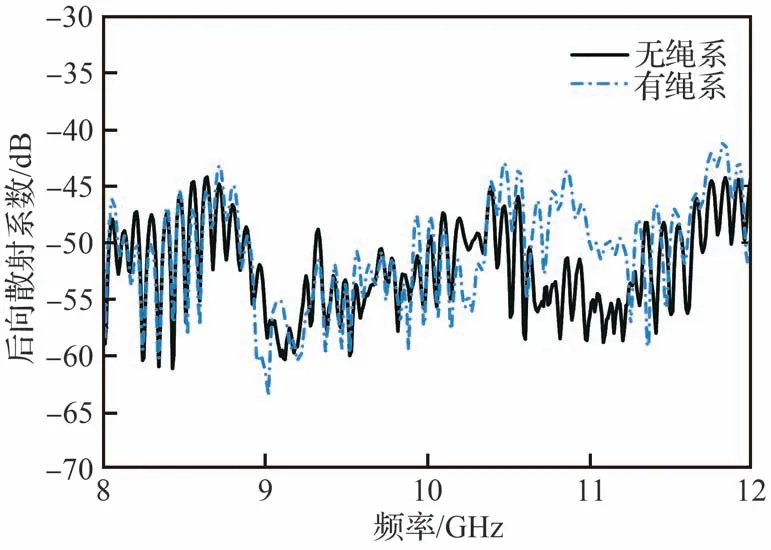
图13 绳系对泡沫转台电磁散射特性的影响Fig.13 Influence of wire on electromagnetic scattering characteristics of foam turntable
对于低散射特性的泡沫转台支架和金属支架,其后向散射系数为−25~−45 dB[27],一般情况下,测试场后向散射系数优于−40 dB 时,最低工作频率即可达1 GHz。图13表明,在没有目标物的空暗室情况下,无论静区有没有绳系,8~12 GHz 频段内的测试值均低于−40 dB,且在大部分频段内低于−45 dB。在高频段,虽然绳系的存在使后向散射系数有所升高,但幅度不大,最高值未超过−40 dB。这说明凯夫拉绳的电磁散射特性很低,适用于作为支撑目标物的绳牵引并联机构牵引绳,能够保证电磁散射测试所需测量精度[33]。
图13 中,牵引绳为凯夫拉绳的可重构绳牵引并联支撑机构和该微波暗室泡沫转台支架均呈现出很好的低散射特性,能够满足目标测试支架的电磁性能要求。
4.2 飞机目标的雷达散射截面
选择金属飞机模型作为被测目标物,分别采用绳系牵引机构和泡沫转台作为支撑,测试2 种支撑方式下飞机模型处于相同位姿时的雷达散射截面,并对照试验结果,如图14 所示。图中试验曲线表明,飞机模型在2 种支撑方式下的雷达散射截面测试结果趋势一致,在低于8~9.5 GHz频率范围内泡沫转台的雷达散射截面略高,在9.5~12 GHz 频率范围内则较低。2 种支撑方式目标雷达散射截面测试误差幅值不到1 dB,相对误差不超过±10%。

图14 2 种机构支撑下飞机目标的雷达散射截面及其绝对误差Fig.14 Radar cross section and its error of aircraft tar⁃get supported by two mechanisms
根据电磁散射测试回波水平与测试精度的关系,如果后向散射系数比目标散射水平低20 dB,则能使测试结果不确定度达到±1 dB[1]。综合图13 结果,在8~12 GHz 频段范围内,2 种支撑方式的后向散射系数比飞机模型的雷达散射截面低25 dB 以上,测试结果不确定度能够达到1 dB,这样的误差在文献[1]所述不确定度范围之内。2 种支撑方式下被测目标物的雷达散射截面没有明显的高低之分,进一步说明了采用绳系并联支撑机构作为目标支撑机构是可行的。
5 结 论
本文设计了一种用于目标物电磁散射特性测试的可重构绳系并联支撑机构,对该机构进行了运动学、动力学和工作空间分析,对其电磁散射特性进行了试验测试,并与传统的泡沫转台进行对比,得到以下结论。
1) 通过调整绳系结构和目标物的悬挂方式,可重构绳系并联支撑机构可以实现对目标物的3 个姿态角分别进行0°~360°的全扫描。
2) 可重构机构的绳系结构和悬挂方式确定后,绳系并联支撑机构的工作空间可控。通过调整绳长和绳拉力分布,易于实现目标物全滚转与俯仰、偏航组合姿态的运动,以进行所需的各种不同姿态下电磁散射特性的测试。
3) 通过电磁散射试验验证,凯夫拉绳系在微波暗室内具有较低的回波水平;对照某飞机缩比模型在绳系并联机构和泡沫转台2 种支撑方式下测得的雷达散射截面,两者的相对误差仅为±10%,进一步证明可重构绳系并联支撑机构适用于微波暗室目标物电磁散射测试。
受测试场地条件和高精度飞机模型制造水平限制,本文仅对缩比飞机模型进行了雷达散射截面测试,但这并不妨碍上述结论的正确性。为实现可重构绳系并联支撑机构在该领域的工程实际应用,后续还将进一步针对大尺寸、低散射水平模型对机构进行优化设计,并解决目标物运动姿态的高精度控制问题。
