MMC-MG配电网系统动态冗余控制策略设计及仿真优化
2023-12-13张婉明席海阔白明辉李莉张新亮
张婉明, 席海阔, 白明辉, 李莉, 张新亮
(国网冀北电力有限公司承德供电公司, 河北, 承德 067000)
0 引言
随着全球能源消耗的快速增长,传统石化能源已经无法满足新的增长需求,太阳能、风电等多种可再生能源则获得了极大的应用推广,但这些不同结构的配电网都存在与整体电网系统之间的匹配问题,需要对各自的运行控制过程开展深入分析[1-4]。针对以上研究结果,有学者采用H桥微源逆变器构建了一种串联结构的配电网(SMPGs)[5],有望从结构层面克服传统配电网面临的问题。现阶段,针对MMC-MG系统开展的研究基本都是在孤岛模式下探讨系统的输出控制性能、电压稳定性以及功率协调方面的内容[6-8]。
MMC-MG是由风电、光伏共同组成的配电网,并为各微源直流链配备了储能系统,因此可以获得相近的直流链电压。为确保微源达到更高利用率,同时运用微源子模块输出功率排序以及调制载波层叠脉宽的方法来获得合适的微源冗余。但因为风电、光伏容易造成波动变化的微源出力[9],并且大部分能量都位于低频区段,此时选择原始功率条件排序并不能准确体现实际出力情况。因此需重新构建合适的信号提取算法,根据功率低频分量调节模块冗余值[10]。文献[11]设计了一种通过经验小波转换的方法来实现配电网运行保护的方案,利用提取到的零序电流最高频分量并以此组成故障特征,使配电网获得更优保护效果。
EEMD分解光伏功率信号高频分量接入储能系统以平滑光伏出力波动,具有较好的平滑效果。文献[12]则通过EEMD方法对光伏功率信号进行分解,当在储能系统中加入高频分量后可以实现平滑的光伏出力,达到理想的平滑性能。本文选择EEMD进行分解预处理信号,提取其低频分量并排序,主要研究MMC-MG系统内包含冗余微源子的组成结构,设计一种通过EEMD分解方法来实现动态冗余调节的方案。
1 MMC-MG结构及调制策略
1.1 MMC-MG结构及分析
图1给出了MMC-MG系统的具体拓扑结构。可以看出,此系统通过模块化多电平变换器(MMC)相连,之后利用滤波器、交流负载与母线、开关将其连到外电网系统中。该系统由上部与下部的桥臂构成,各桥臂分别包含了N个常规GM与K个冗余GM,并跟电抗器L相连,在三相中总共存在6(N+K)个GM。
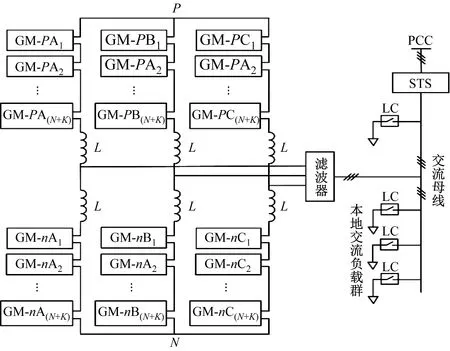
图1 MMC-MG拓扑结构
图2给出了微源子模块(GM)的具体拓扑结构。GM通过风电、光伏微源的整流转换处理后再与储能系统(ES)与半桥变流器(HC)相连;HC中包含了1个电容器、旁路开关Si与2个带反并联二极管IGBT。利用V1、V2通断调节的方式使GM完成投入与切除模式的相互转换。在GM发生故障的情况下,关闭旁路开关Si,同时从系统中切除故障GM。
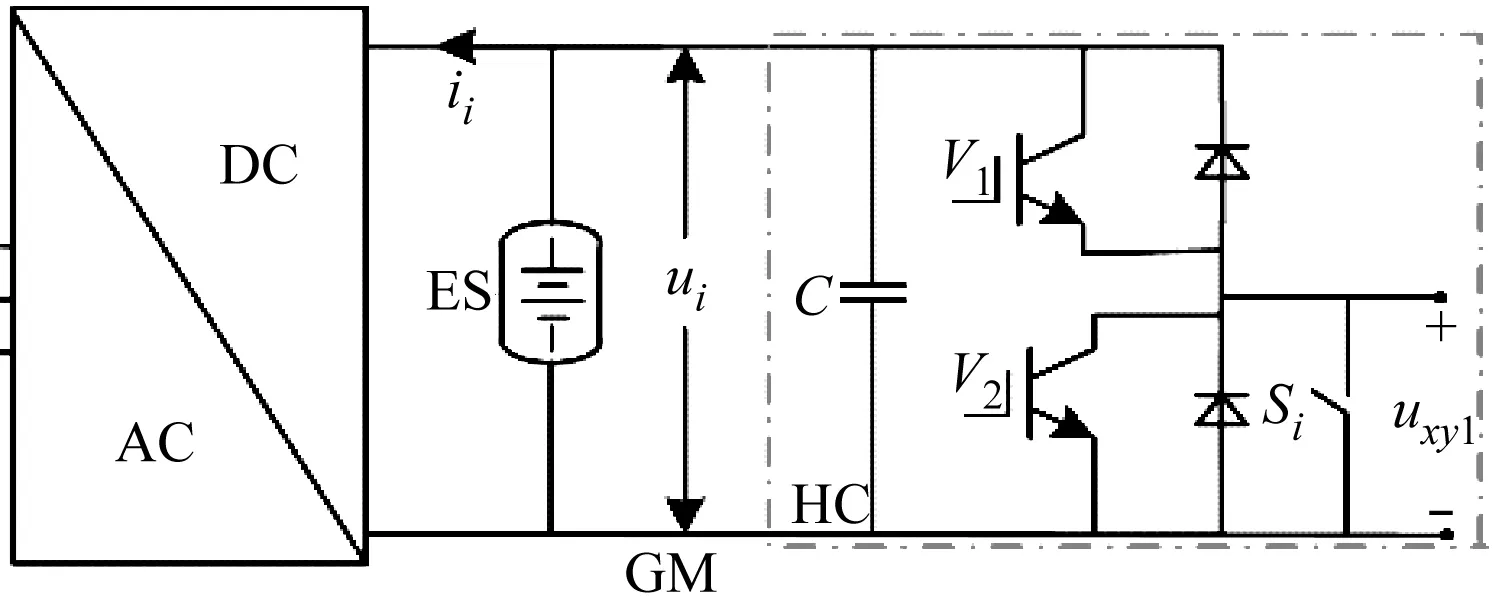
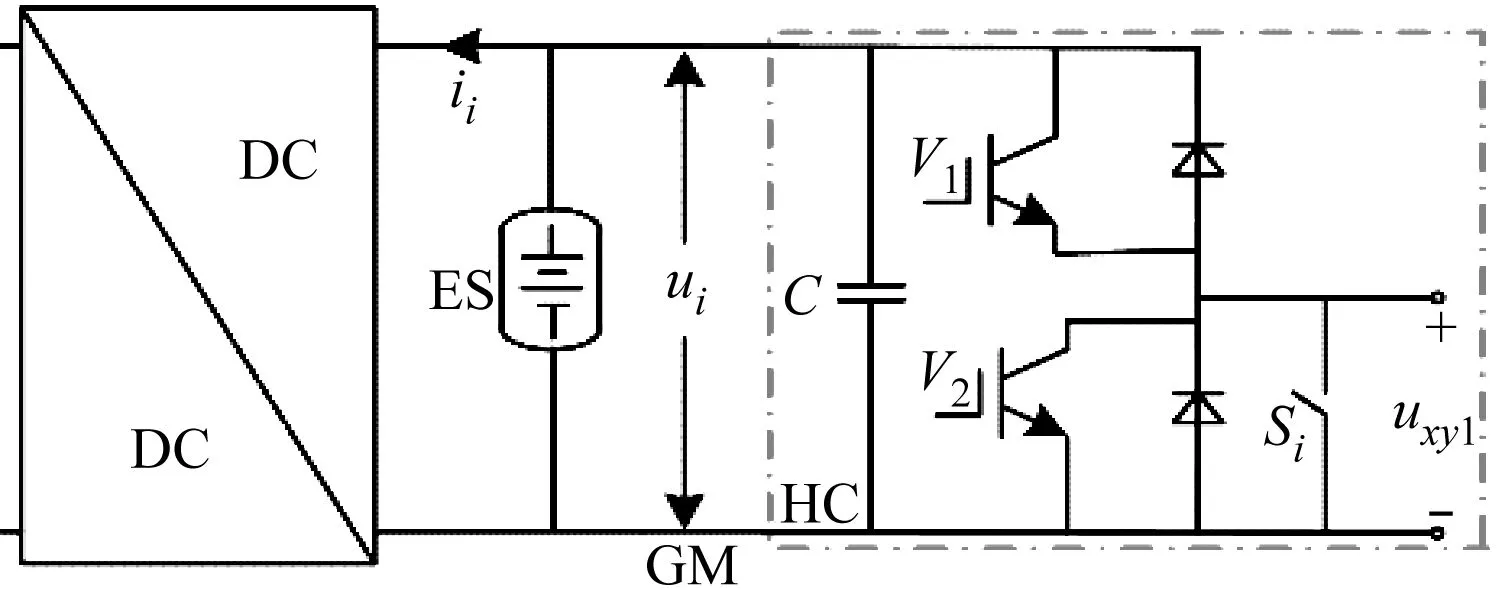
图2 GM拓扑结构
1.2 调制策略
载波层叠脉宽调制(PD-PWM)是一种输入、输出呈现线性变化规律的调制技术,具备优异谐波性能,也较易达到冗余控制的效果[13-14]。以下给出了上述过程的控制原理:不考虑冗余因素影响的情况下,各桥臂包含了N个GM,因此需要设置N个载波。当调制波超过三角载波时,输出结果“1”;当调制波比三角载波低时,输出结果“0”,具体见图3。假定上、下桥臂的调制电压如下:
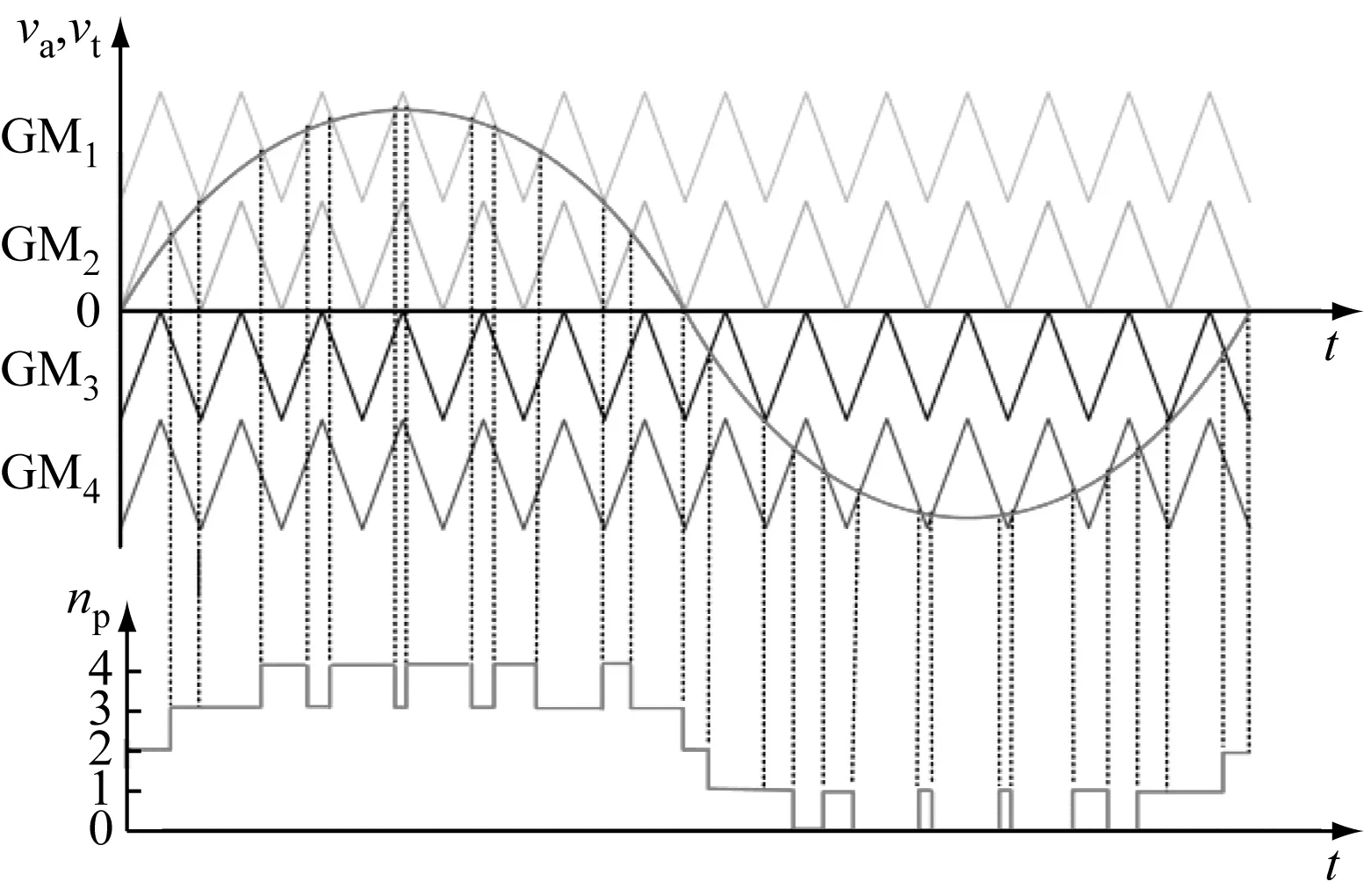
图3 PD-PWM调制原理
(1)
(2)
2 动态冗余控制策略
2.1 控制方案
当系统处于正常运行状态时,所有GM都能发挥作用,实现动态冗余的控制效果。本文采用EEMD分解方法来实现动态冗余调节。采用上述策略进行调节的具体步骤:假定由N+1个电平组成的MMC-MG系统中各桥臂GM的数量是J=N+Z,其中,Z表示故障子模块数量。通过EEMD分解技术提取到功率的低频分量(EEMD分解方法参考文献[13]),经过分解后的模态需在0.02 s内完成分辨,确认功率排序所需的GM。图4给出了GM动态冗余控制的具体框图。

图4 GM动态冗余控制框图
由图4可见,上述控制策略包括以下4个步骤:先完成故障GM信号获取,再对功率进行EEMD分解,选择合适的GM,延伸系统调控信号并完成参数分配。先判断桥臂有无故障GM,当不存在故障GM时,Z取值为0,则对微源输出功率通过EEMD分解的方式完成排序;接着设置GM选择逻辑,利用合适的桥臂电流与调整策略确定n个GM,当系统内含有故障模块时(Z不等于0),首先采用预处理的方式构建得到故障子模块,再分解计算剩余微源的初始功率。最终按照确定后的GM拓展控制信号把所得结果分配至MMC-MG系统子模块中。
2.2 故障GM处理
GM规则流程如图5所示。其中,工频周期设定在0.02 s,T表示累积时间,t是运行过程的对应时刻。在t与T不相等的情况下,无须选择GM,此时可以根据之前时刻的GM进一步运行;t上升到T时,重新设置运行状态下的GM。
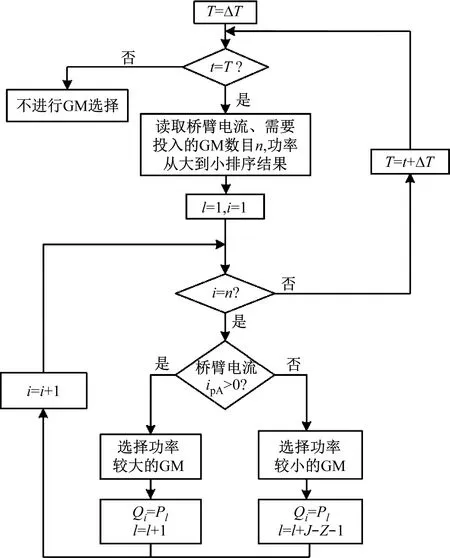
图5 GM规则流程图
确定GM之后,再对控制信号进行扩展和分配。以下为具体处理规则:桥臂内不存在故障GM(Z=0)的情况下,共分成N组控制信号,经过扩展获得J组,此时冗余GM也开始正常运行;再对之前GM控制信号设置参数(1,0),得到剩下冗余GM,同时将(0,1)作为控制信号。系统桥臂内存在故障GM(Z≠0)的情况下,系统共包含J-Z个GM,形成J-Z组控制信号,为确保控制信号和桥臂GM形成准确对应关系,对J-Z组控制信号进行扩展得到J组结果。
对于工程使用过程来说,需要配备传感器进行控制信号采集,再利用微处理器计算各桥臂GM调节数量与时间。以下为系统的裕度极限指标:
(3)
式中,ZA表示GM中形成的故障数量。结合GM选择逻辑确定最大的工频周期功率GM进行测试,之后根据2.2节的方式把控制信号分配至GM。
3 仿真分析
为了对本文设计的动态冗余控制策略开展可靠性验证,根据图1和图2中的拓扑结构建立仿真数学模型,并按照表1内容设置仿真参数。
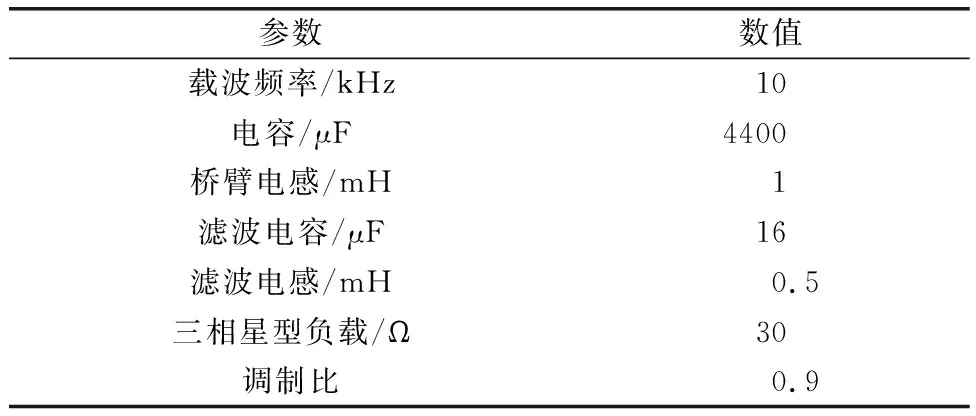
表1 MMC-MG系统仿真参数
控制不同时间下的微源温度、光照强度、风速,选择桥臂中5个GM作为研究对象,共包含4个正常GM,剩余1个属于冗余GM,具体功率信号见图6(a)。GM1表示风力微源,处于不同工况下时发生了输出功率的明显变化;GM3、GM5都属于光伏微源,不同工况下的输出功率基本一致。

(a) 原始功率输出波形
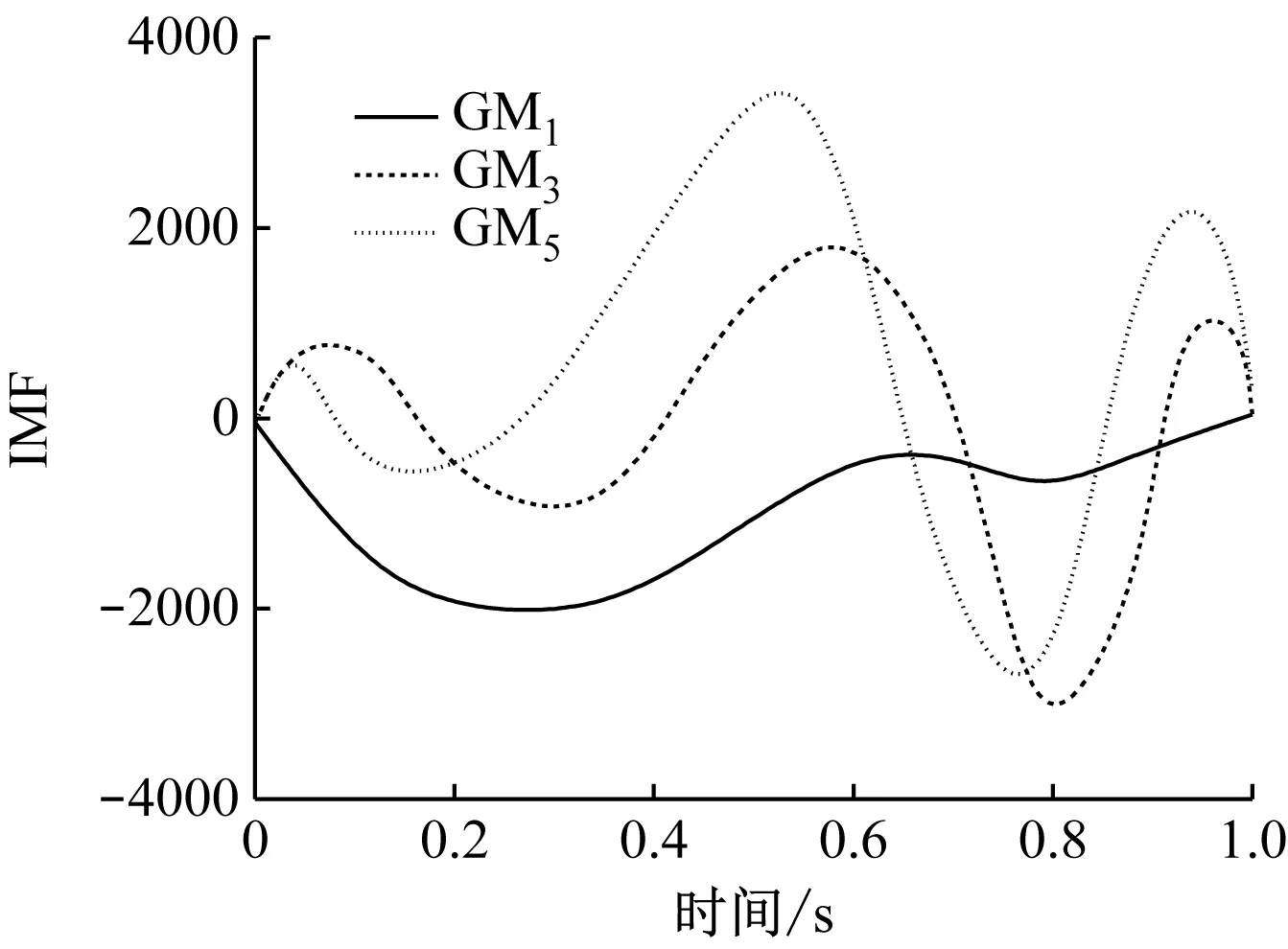
(b) 信号EEMD分解图6 原始功率输出波形和EEMD分解结果
对以上微源初始输出功率通过EEMD分解再根据低频分量完成功率的排序,图6(b)给出了EEMD分解的具体波形。结果表明,上述策略不仅能够达到动态冗余的效果,还能获得更高的微源利用率。
处于恒定的光强、温度与额定风速时,获得了160 V的直流链电压。图7给出了桥臂中无冗余GM时进行仿真得到的波形曲线。可以明显发现,当系统处于稳定运行状态时,形成了对称分布的稳定三相线电压,线电压只发生了0.35%的小幅畸变。
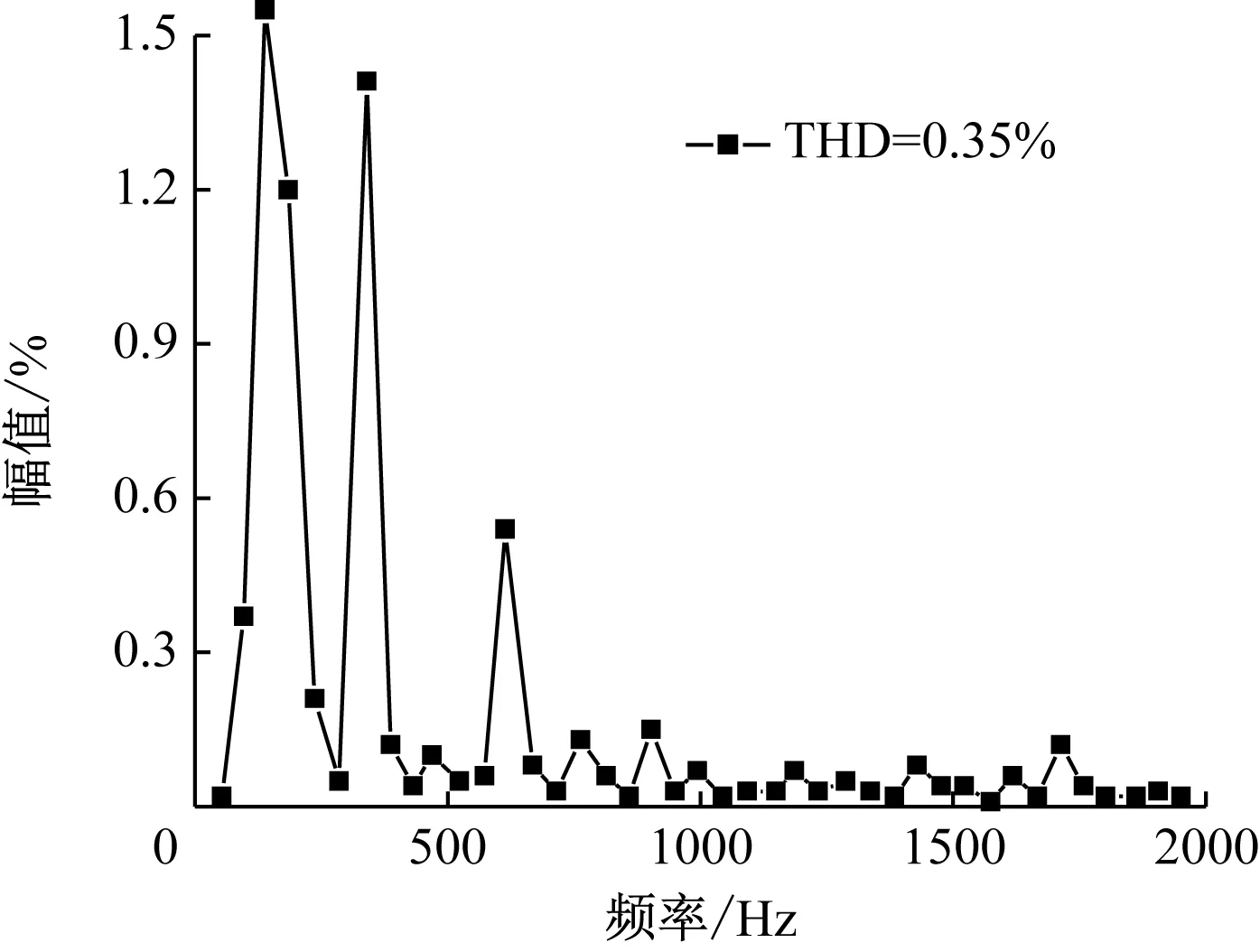
图7 系统无冗余时的仿真波形
系统经过1 s运行后,A相上桥臂形成1个GM故障时对应的输出电压与频谱见图8,可以看到此时三相线电压波形表现为明显的不对称分布状态,促使谐波畸变率提高至3.05%。
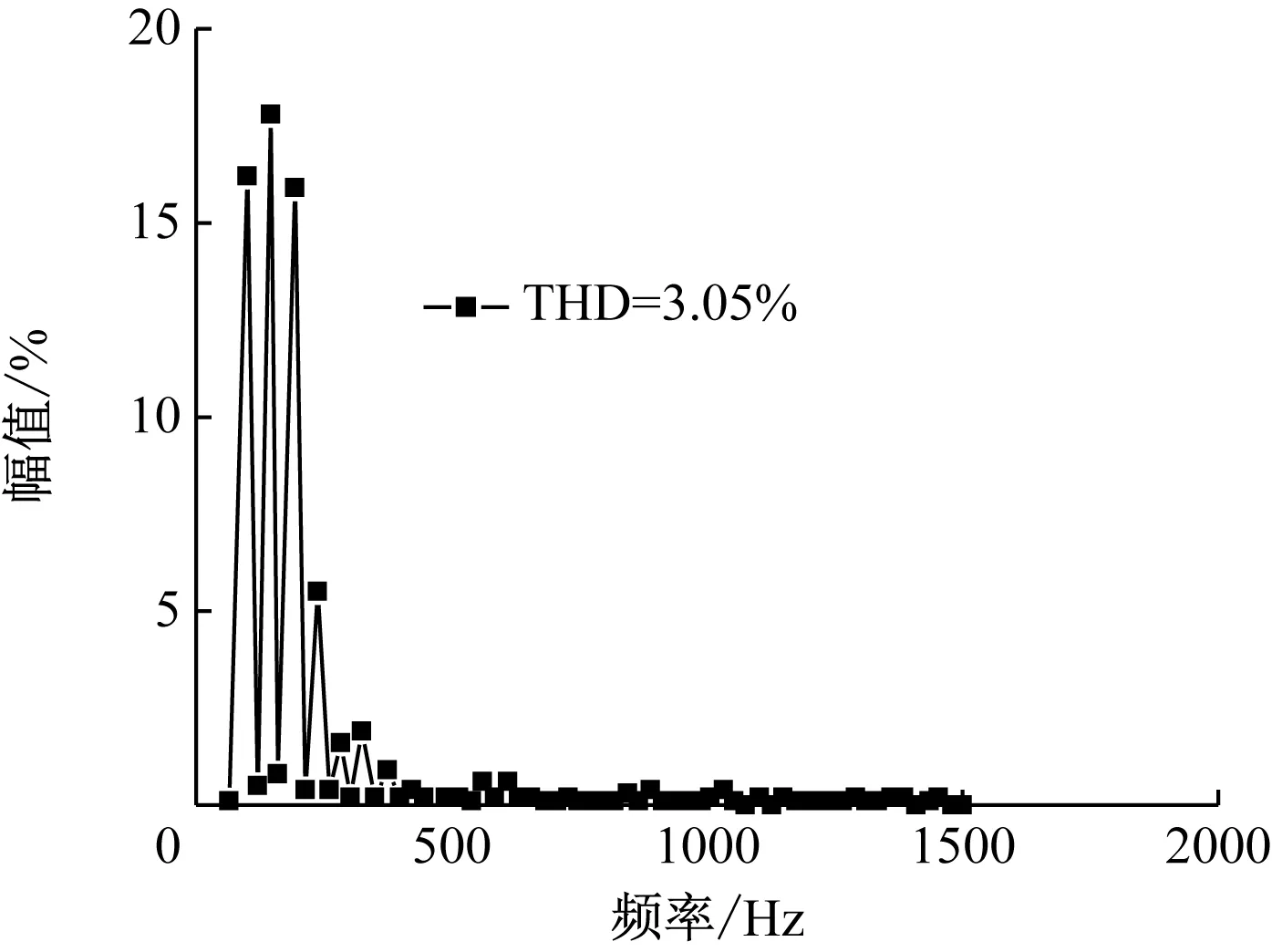
图8 系统无冗余故障时的仿真波形
根据本文动态冗余控制方式,A相上桥臂产生1个GM故障的情况下得到了图9的仿真结果。其中,三相线电压经过1 s后依然呈现对称状态,畸变率减小至0.4%。由此表明,采用本文动态冗余控制方式可以使系统达到良好的可靠性。
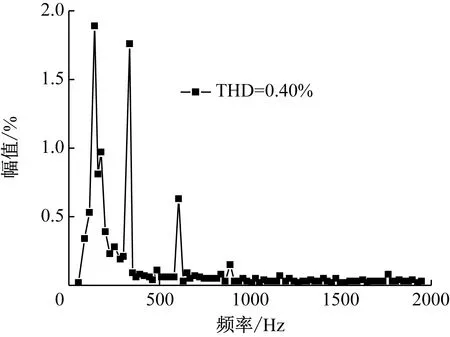
图9 动态冗余控制仿真结果
4 总结
通过EEMD分解技术提取到功率的低频分量,确认功率排序所需的GM。EEMD分解策略不仅能够达到动态冗余的效果,还能获得更高的微源利用率。当系统处于稳定运行状态下时,形成了对称分布的稳定三相线电压,线电压只发生了0.35%的小幅畸变。三相线电压波形表现为明显的不对称分布状态时,谐波畸变率提高至3.05%。采用本文动态冗余控制方式可以使系统达到良好的可靠性。
