基于人工智能的智能轮椅设计
2023-12-13宋承继陈小健
宋承继, 陈小健
(陕西工业职业技术学院, 信息工程学院, 陕西, 咸阳 712000)
0 引言
针对智能轮椅的研究大多聚焦于轮椅的移动方式、运动控制、结构优化等方面,普遍存在安全性能不足、传感器模组容易受室内外复杂环境影响、功能单一等问题。基于此,本文研究一种基于人工智能技术的新型智能轮椅,该轮椅系统在保证轮椅传统功能的基础上通过语音识别完成老年或残障人士对轮椅的操作;环境监测功能能够在预设范围内设定电子围栏,通过激光测距传感器和超声波测距传感器自动识别障碍物,并对轮椅的运行状态进行报警提示或操作干预;姿态控制功能可以根据下肢康复训练的要求调整轮椅的结构,辅助患者完成康复训练动作。这款智能轮椅的设计与应用帮助腿脚不便的老龄人以及肢体残障人士解决了独自出行、康复训练等现实问题。
1 智能轮椅总体设计
按照分层思想与模块化设计理念,将系统分为“大系统+小系统”2个部分。大系统是轮椅控制系统,由代步行驶、姿态调整(姿态变换集中在站姿、平躺、坐姿方面)、下肢康复训练辅助等功能模块组成。小系统是用户交互系统,由避障检测、语音识别等功能模块组成。智能轮椅系统功能如图1所示。

图1 系统组成框图
由图1可知,智能轮椅系统结构主要包括主控制器、电源管理模块、行驶控制模块、避障检测模块、语音控制模块、姿态控制模块,其外围单元由操纵杆控制单元、摇杆信号单元、A/D转换单元、LED控制单元、按键单元、显示单元等构成。其中,因姿态控制与下肢训练功能关联所以将姿态控制模块与下肢训练模块统一为一个模块。
2 系统硬件选型
2.1 系统主控制器
系统主控采用NXP公司生产的32位处理器作为ARM Cortex-M3核心微控制器,该处理器拥有32位数据路径、32位寄存器、32位存储器接口,拥有独立的指令总线和数据总线,可以使读取指令与数据访问并行不悖。根据系统控制需求,选择了LPC17XX系列中的LPC1754型号,该芯片的集成度较高,功能较低,满足系统设计中的嵌入式应用需求,除操作频率可以达到100 MHz的技术优势外,配套的外设组件中设有CAN通道、若干接口、数据存储器、通用IO管脚等(具体以该芯片说明书为准),完全满足姿态转换及康复训练模块中传感器信号处理、6个直线电机协调控制,以及模块之间的通信[2]。
2.2 行驶控制模块
轮椅行驶按照操作可以分为4个状态,分别为匀速行驶状态、差速转向状态、锁死状态和停止非锁死状态。匀速行驶状态主要通过电机正向或反向转动带动双轮匀速行驶;差速转向状态通过差速转向模块输出电机正反转差速数据,以完成不同的转向角度;锁死状态根据控制单元实现电子的锁死状态,完成长时间停车和坡度停车的需要;停止非锁死状态主要完成轮椅处于水平坡度的临时停车,并完成电机的非控自由状态。
2.3 避障控制模块
系统设计考虑到患者不能对轮椅行驶过程中各个方位的障碍进行及时应对,所以在避障控制方面采用激光测距传感器和超声波测距传感器双结合模式。系统采用了星科创XKC-KL200型激光测距雷达,该激光测距雷达供电电源的电压范围在5 V,感应距离在0.01 m到4 m之间,感应角度为30°到40°的圆锥角,最大使用波特率为128 000 bit/s。超声波测距传感器采用电应普DYP-A19-V1.0型,工作电压为5 V,测距范围为0.28 m到4.5 m之间,相应时间小于9 ms,参考角度约为60°。通过两种测距传感器的互补使用,进一步降低光强和噪声对传感器的干扰,提高了障碍物检测的准确性,使得轮椅的避障功能有效提升[3]。
2.4 语音识别模块
语音识别模块选择了NLP-5X语音识别处理器,该处理器基于16位DSP,集成了数字和模拟处理区块,处理器包含电源、指标灯、麦克风语音处理及输入、功能按键、语音模板存储模块、信号输入/输出接口、音频输入以及各种通信接口。系统采用THCHS30数据集的训练集样本对语音识别方法的声学模型和语言模型进行训练。语言识别测试用例与测试结果如表1所示。
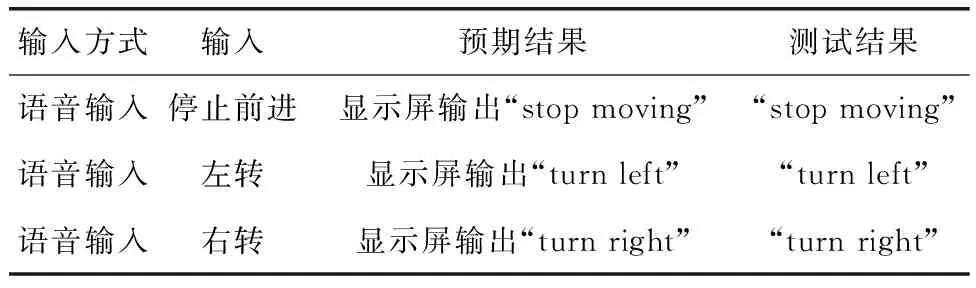
表1 语音识别模块测试用例与测试结果
语音控制功能相对复杂,考虑到使用环境与语音识别,为了确保其使用功能,先按照20~30 dB、30~40 dB、50 dB以上3个范围,划分安静环境、比较安静环境、嘈杂环境,再根据单个命令训练2次并进行存储的要求,开展语音命令训练,每种情况下测试中的控制次数以100次为准。测试结果如表2所示。

表2 语音识别成功率
2.5 姿态控制模块
患者下肢康复训练主要通过智能轮椅的姿态转换完成,所以系统将姿态转换与康复训练合成为一个独立模块,该模块主要包含压力传感器、控制电路、无线通信模块、直线电机等组成。主要实现原理是当用户使用智能轮椅时,无论坐起、平躺、站立,还是进行训练,都是通过传感器采集相关数据,再通过通信信号的传输与控制实现一系列训练活动[4]。以压力传感器为例,智能轮椅中的左右踏脚位置所设置的压力传感器为JHBM-100 kg型号,当用户使用智能轮椅进行站立模式下的训练时,能够改变用户身体重心,屏显处有一图标用来表示轮椅姿态调整时的角度,通过控制屏显中的图案显示整个移动过程。用户左右脚下的压力传感器若感知到重心位移,如左右脚一侧压力增大,另一侧压力减小,那么压力增大的一侧会同步增加传感器输出电压,压力减小的一侧则减少输出电压,通过压力传感器滤波放大电路与A/D转换后,所有信息被发送到主控制器中的单片机完成数据存储与数据分析等。
3 系统关键模块实现
3.1 系统主程序模块实现
主程序是整个控制程序的框架。智能轮椅主程序的功能主要包含系统初始化、看门狗初始化、开/关终端和各子函数。启动智能轮椅控制系统后,初始化系统,其次初始化看门狗,开启终端,进入循环后首先调用信号采集子程序,包括激光测距雷达信号、超声波测距传感器数据、姿态传感器数据等,然后调用各子程序。图2为主控模块主程序流程图。
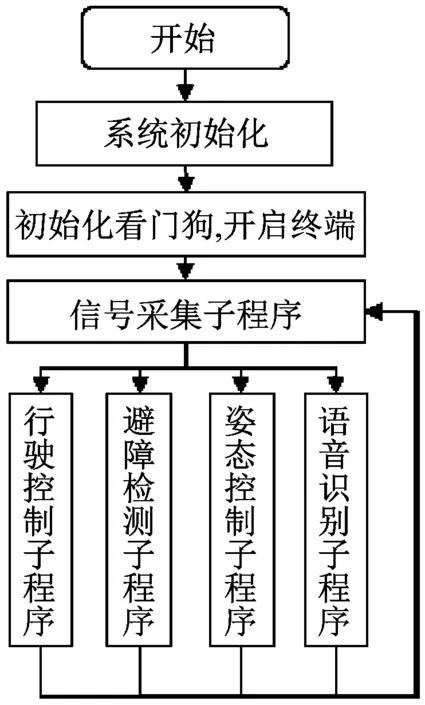
图2 主程序流程图
3.2 避障测控子程序实现
轮椅行驶过程中,当路面检测模块检测到行驶前方存在障碍物时,避障传感器通过信号反馈时长计算前轮与路面障碍的距离,通过转向角度算法得到路面障碍的最小转向角度,再调用速度控制子程序和差速转向子程序,通过2个驱动轮各自需要的转速避开路面障碍[5]。在程序设计中将转向角度计算模型设定为独立功能模块,通过避障判断子程序进行调用,具体代码[6]如下。
void Obstacle_Avoid(){
RandomFactorBuf=RandomFactor;
while(!(RightSenser||LeftSenser)){
if(RandomFactorBuf){
BTurnLeft_1();
delay(300);
}
if(!RandomFactorBuf){
BTurnRight_1();
delay(300);
}
}
if(!PWM){
LeftStop;
RightStop;
}
}
3.3 语音识别模块程序实现
语音识别程序在系统启动初始化中自动加载语音识别模型,完成语音识别训练数据部署,系统自动完成麦克风及识别功能自检。在轮椅系统处于工作状态时,语音识别功能工作流程为:初始化;检测是否存在语音模块;存在(若“否”提示训练/若“是”调用识别提示音);输入触发命令;与语音模板匹配;获取识别结果;成功触发(若“否”返回/若“是”执行对应操作);结束。语音识别功能默认状态随轮椅主控系统自动启动,在获取识别结果后向主控模块发送控制信号,调用相应功能模块实现动作,在不需要语音识别时通过控制面板进行关闭。语音识别调研代码如下。
while(1){
RunASR();∥启动识别
LD_AsrStart();
LD_Init_ASR();
LD_AsrAddFixed();∥向LD模块添加关键词
LD_AsrRun();∥运行ASR 启动ASR运算(“开始识别”)
ProcessInt0();∥判断识别是否有结果
}
3.4 系统实验结果
工作环境感知是智能轮椅实现主动安全性能的重要保障。在轮椅移动过程中,利用安装在轮椅前方的摄像头和激光雷达传感器及时感知到障碍物,评测轮椅能否按照预定避障策略完成避障操作。系统目标检测采用YOLOv5,数据集的制作主要包括图片收集和图片标注。图3分别显示了实际工作环境和物体的识别结果。

(a) 汽车

(b) 行人

(c) 电动自行车图3 工作环境障碍物识别
通过对道路场景中的汽车、电动自行车、行人等单元的检测识别(见表3),主控制器可以通过显示、语音及行驶模块准确提示障碍物类型及避障操作指令。
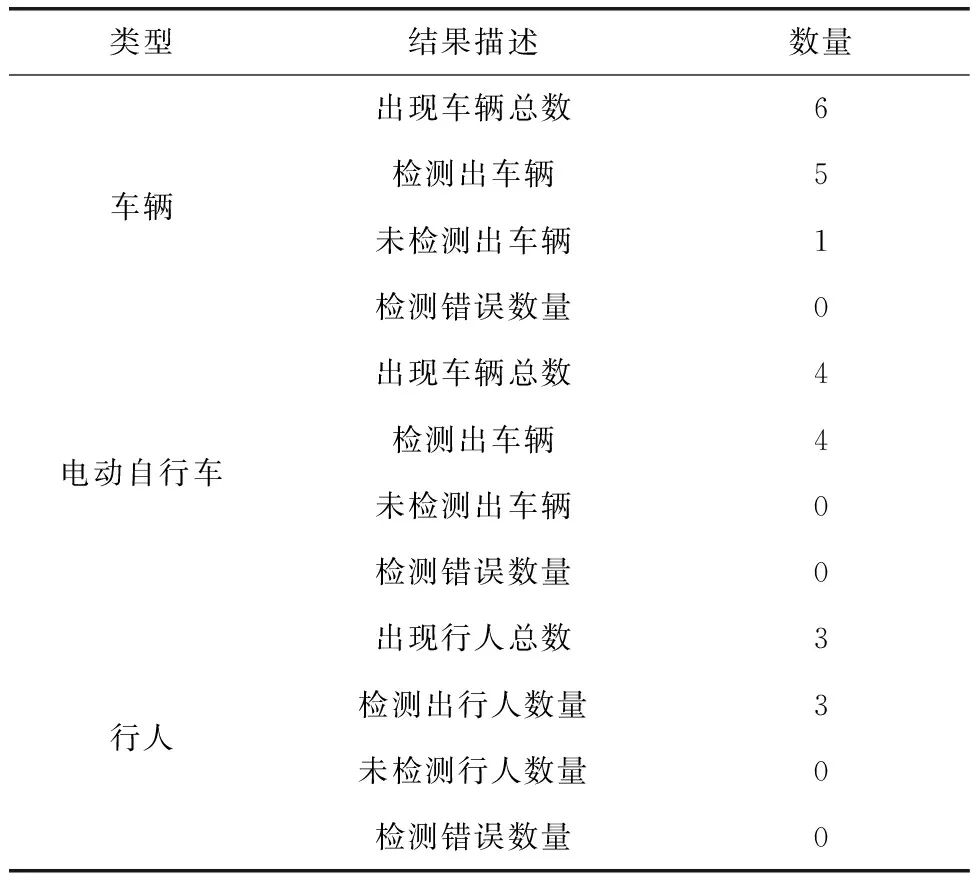
表3 道路场景中目标检测结果
YOLOv5是基于coco数据集的预训练模型,可以将预训练模型迁移到更为广阔的识别领域,为智慧轮椅的感知功能提供强大的可扩展性。
4 总结
本文通过人工智能技术对传统轮椅进行了改进,通过ARM Cortex-M3主控芯片丰富了智能轮椅的接口,利用雷达、激光传感器结合避障算法构建了轮椅对工作环境的主动感知,构建电子围栏为轮椅在移动过程中实现了主动安全。下肢康复训练从患者的实际需要出发,将轮椅的姿势变换与下肢康复训练结合起来,通过轮椅的多姿态调整匹配专业的下肢康复训练动作,全面提升智能轮椅在下肢康复训练的应用效果。随着人工智能技术的完善,智能轮椅在功能和性能上将会有较大的提升空间[7]。例如,智能轮椅的避障控制可以采用BP神经网络PID控制算法进一步提升避障的响应效果,语音识别在实现语音操控轮椅的同时,还可以和智能门禁、智能家居、智能康复等相关领域结合起来,为存在行动障碍的患者提供更为人性化、个性化的服务。