电动汽车有序充电多目标优化方法
2023-12-13洪祥黄建刚钱科军郑众
洪祥, 黄建刚, 钱科军, 郑众
(1. 南京大全电气研究院有限公司, 江苏, 南京 211000;2. 国网江苏省电力有限公司苏州供电分公司, 江苏, 苏州 215000;3. 国网苏州电动汽车服务有限公司, 江苏, 苏州 215000)
0 引言
电动汽车能够实现电能的储存及自动转换功能,降低汽车尾气的排放,减少城市内的噪声污染,成为汽车制造业发展的新趋势[1]。电动汽车的发展推动了相应充电设备的建设,电动汽车在使用过程中的无序充电行为对电网系统运行造成极大负担。为了保证电网系统的平稳运行,避免城市用电的集体瘫痪,部分相关行业学者针对电动汽车的有序充电方法展开研究。电动汽车有序充电研究的目的是解决能源管理和充电设施管理的问题。首先,对于大量的电动汽车协调它们的充电需求,以避免能源的浪费和充电设施的超负荷运行,是需要解决的重要问题。其次,由于不同车辆的需求不同、车主的行驶习惯不同以及电网负载管理的需要,有序充电可以保证每辆车得到公平合理的充电服务,同时能够优化电网的峰谷电量差,降低电网负担,减少供电不足和用电矛盾。因此,电动汽车有序充电的研究旨在制定合理的充电策略和管理方法,以实现电动汽车的智能化充电,并为电网的可持续发展和智能化管理提供技术支撑。
余桂华等[2]在智能配电技术支持下,通过对用户响应机制的分析,制定动态分时电价,并对不同时段的电动汽车充电需求展开预测;结合居民用电特点,对区域性电网负荷展开预测,并设计了实时电价下的有序充电方法。李敬航等[3]基于电动汽车驾驶人员的驾驶习惯、充电行为建立电动汽车充电数学模型;结合模糊聚类算法,分析电动汽车内置供电设备初始电荷状态以及负荷表现;通过马尔科夫链思想建立电动汽车负荷模式概率转移矩阵,引入遗传算法,对电动汽车的有序充电问题求解。江明等[4]基于电动汽车车主充电行为的不确定性,利用MFRL方法对充电站数据样本展开分析,以电动汽车车主充电行为模式为依据,引入马尔科夫决策过程对用户用电需求展开预测,建立充电完成度指标对代价函数展开优化,通过TDL算法训练历史充电行为及电荷水平数据,进而完成有序充电方法的设计。
对电动汽车进行有序充电行为进行控制。不同电量、不同行驶距离的电动车充电过程属于多目标优化过程,以上方法存在网损率偏高、在用电高峰期无法避免充电站高负荷情况以及电压偏移过高等问题。因此,本文通过对电动汽车驾驶人员驾驶行为与充电习惯的分析,建立电动汽车充电负荷模型,采用粒子群优化算法和二进制编码进行有序充电多目标优化,以实现有序充电策略的优化。
1 充电负荷控制模型构建
1.1 驾驶行为分析
不同地区的驾驶人员在驾驶习惯上对充电设施可用性、充电成本的认识等方面可能存在差异,从而影响他们的充电行为。其中,驾驶人员的驾驶习惯会影响电动汽车的充电需求频率、选择的充电方式、充电时间和充电策略,因此在构建电动汽车充电负荷控制模型前对电动汽车车主的驾驶行为展开分析。
电动汽车从存放地点出发后,其行驶过程可能包括商城、工作地点、公园等多个地点,出行轨迹在通常情况下复杂多样。将驾驶者在一定时间内对出行目的形成的复杂出行轨迹定义为电动汽车出行链[5]。根据美国交通运输部对于车辆出行链的统计调查结果,驾驶者每天出行目的产生的出行链平均长度约为3,参考全国家庭出行统计调查结果,设电动汽车驾驶者的行驶行为为x,行驶里程的分布均值为νd,驾驶里程的分布标准差为ζd,则电动汽车出行行为的数学形态正态分布公式如式(1):
(1)
电动汽车在无干预前提下的随机性充电行为被称作无序充电行为,通常不受外部原因调度。将某区域环境内的电动汽车的充电起始时刻视作该车辆的外出结束时刻,通过对区域环境内的车辆充电情况的调查分析,可得出区域内车辆的累积密度与充电时间关系分布曲线如图1所示。
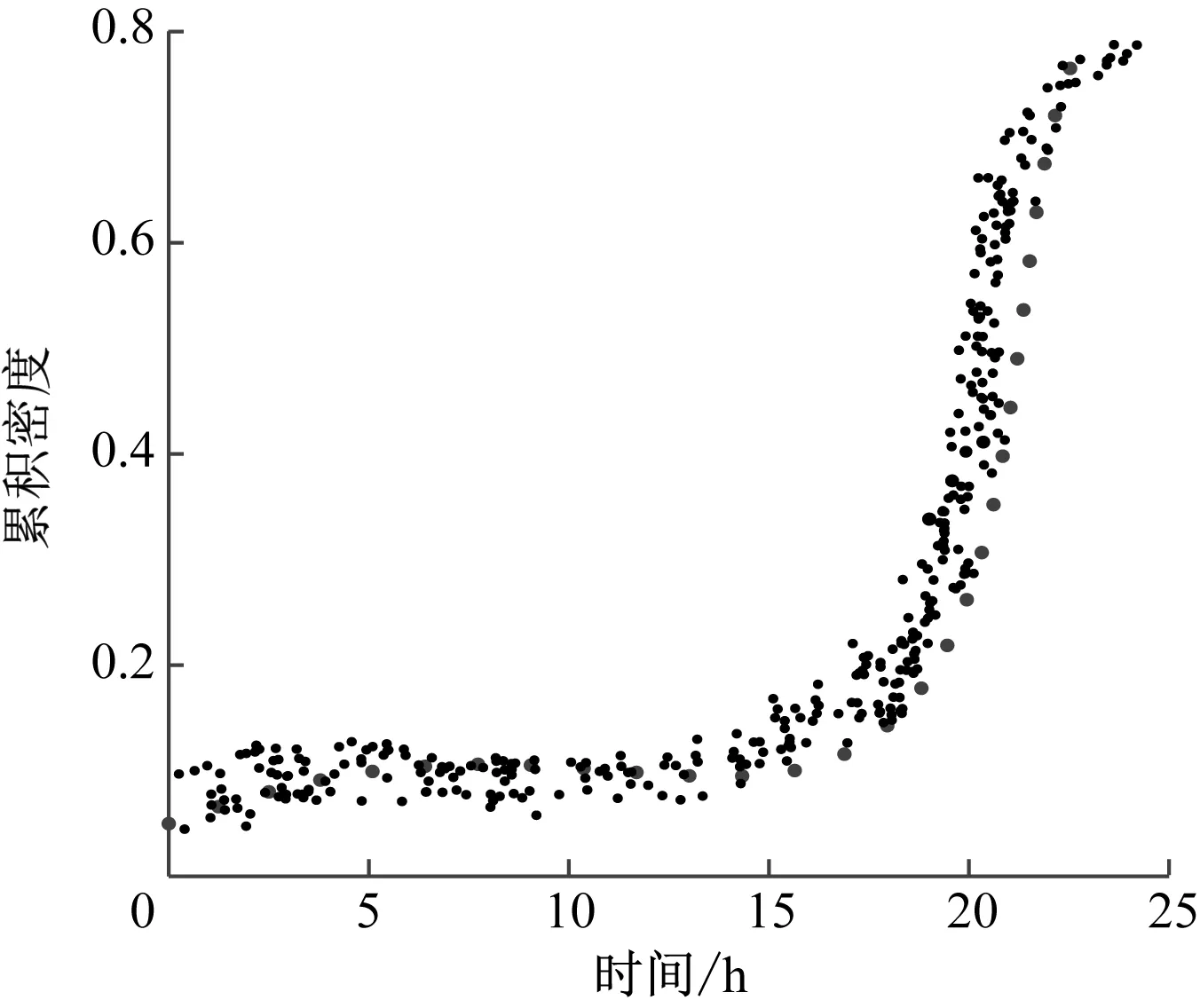
图1 无序充电调查结果
将区域范围内的电动汽车无序充电调查结果代入式(1)车辆出行行为正态分布公式,对图1的拟合结果即为车辆出行行为的分析结果。
1.2 建立电动汽车充电负荷控制模型
建立电动汽车充电负荷模型可以帮助电力系统规划者和运营者更好地了解充电负荷的特征和行为,从而更好地进行电网规划和运营管理。通过分析驾驶人员的充电习惯,可以了解他们的出行需求和充电习惯,从而更准确地预测和管理充电负荷。
电动汽车车内电量会随车辆公里数的增加而逐步降低,此时电动汽车行程终止时的电荷状态SOC值[6]也会产生相应变化。假设当前车辆k的SOC剩余量为SOCk0,本次电动汽车的行驶距离为∑lj,两者存在相互影响关系。设该电动汽车的续航里程数为Ek,此时车辆行程结束时刻的状态,可通过SOC剩余量与行驶距离长短之间的相互影响关系表示,具体计算公式如下:
(2)
当电动汽车驾驶过程中出现SOC剩余量过低的情况时,将因动力不足而无法继续行驶,此时电动汽车只能被动地选择前往充电站补充电能,充电完成以后才能够继续对未完成的出行链展开补充。设在充电期间的对应充电设备运行效率为γ,车辆充电完成后的电荷状态为β,此时电动汽车的充电负荷模型可通过式(3)计算,其中T为电量,
T=E(γ-SOCk0)(ν×P)-1
(3)
式(3)中,P表示充电功率,E表示汽车电池容量。若电动汽车离开充电站时的电量为饱和状态,则此时可将电荷状态β视作1。
2 有序充电多目标优化
对电动汽车充电负荷模型进行多目标优化,可以减少充电排队等待时间,使得充电过程中能够优先使用价格更低的电价时段进行充电,从而提高充电效率、降低充电成本,同时也有利于电网的稳定和优化。
2.1 目标函数条件设定
以区域范围内的电力系统最小负荷波动为目的,设minG为最小波动目标函数,N为谷时段数,i为当前充电时段,i充电时段下的区域性范围电力系统负荷值为Ei,有序充电调节下的电力系统总负荷值为E,根据第1部分的分析建立的充电负荷模型T,建立目标函数minG如式(4):
(4)
Ei=Ei,EV+Ei,load
(5)
其中,Ei,EV为i时段电动汽车并网前提下的充电站充电负荷值,Ei,load为i时段电力系统运行条件下的基础负荷值。
为了保证有序充电的进行,对式(4)的目标函数minG设定约束条件。设充电站内的充电电动汽车数量为L,充电站内第j(j∈L)辆车的充电耗时为tj,充电功率为Ej,功率因数为r,则该车耗电量U的计算过程如下:
(6)
此时可建立以充电站内充电桩的运行功率Qch为约束条件的目标函数G,设Qch,min为最小运行功率,Qch,max为最大运行功率,约束条件需满足式(7)关系:
(7)
根据式(7)得到目标函数条件为
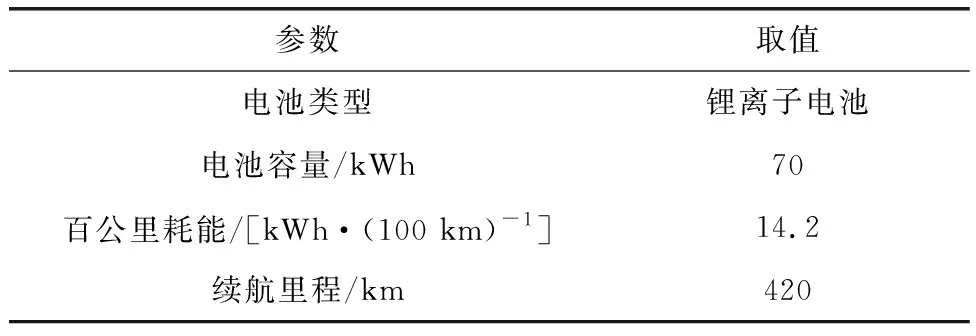
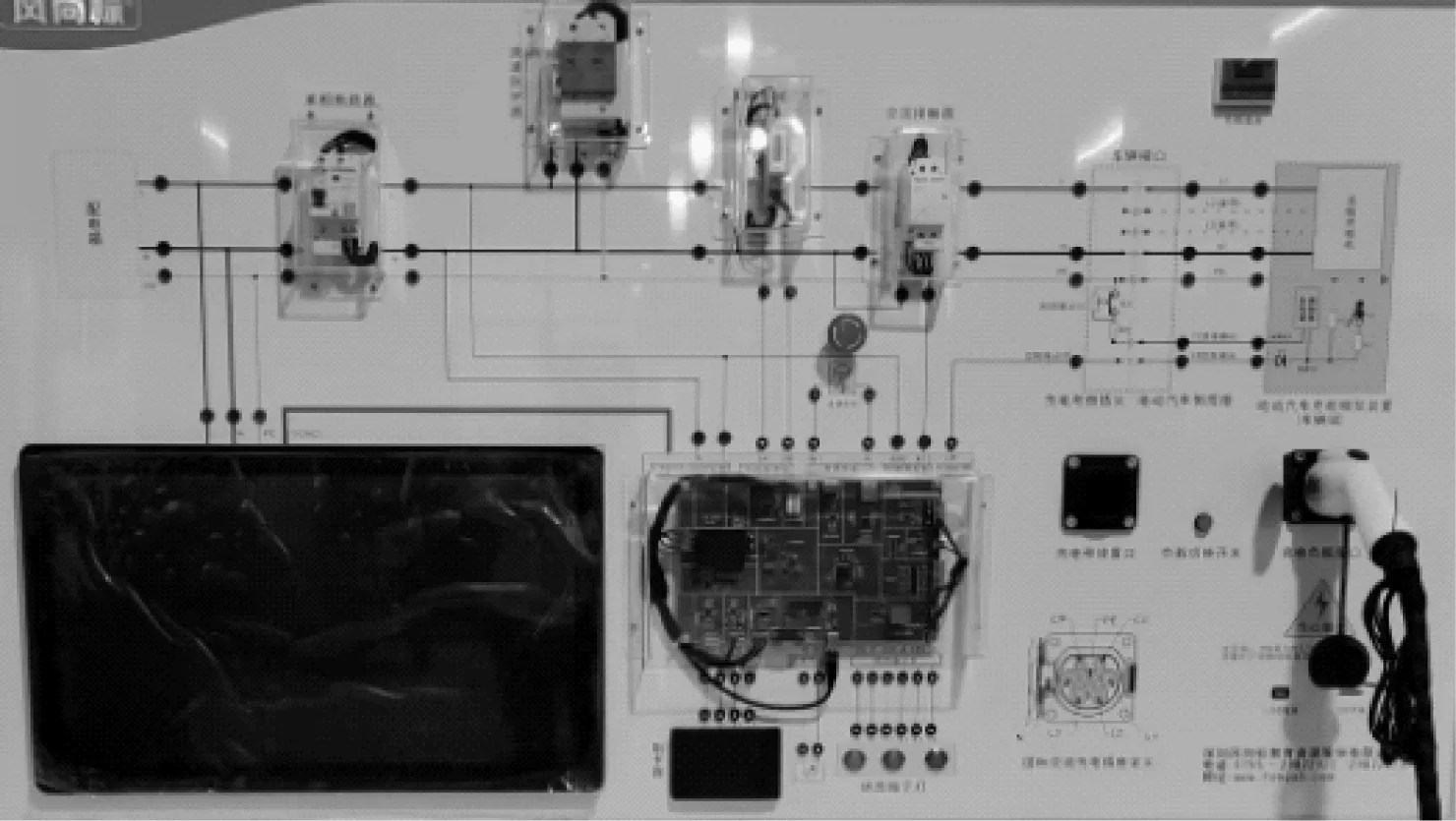
Qch,min (8) 其中,Qch=Qch,min为j=1时即当前为最小运行功率,Qch=Qch,max为j=L时即当前为最大运行功率。 电动汽车的有序充电问题是一个涉及充电站总功率、单独充电桩功率、区域性电力系统负荷情况等[7]多因素复杂问题,因此本文采用粒子群优化算法[8-9]对式(8)约束下的目标函数minG优化问题展开求解。 假设O维空间中存在一个由n个粒子组成的粒子群,此时的粒子位置为Wy=(w1,w2,w3,…,wy),空间内的粒子飞行速度为Vj=(v1,v2,v3,…,vj),全部粒子的最佳位置为Wh=(w1,w2,w3,…,wh),单独粒子飞行过程中经历的最好位置为Wα=(w1,w2,w3,…,wα),则在每一次迭代中,根据当前位置和速度计算出粒子的适应度值: f(n)=ϑQch (9) 其中,ϑ为粒子惯性权重,当适应度达到一定值时,即Qch=Qch,max,停止迭代。依据粒子适应度的大小,更新粒子的位置和速度向最优解靠近。此时空间内第l个粒子的飞行速度vjl更新、粒子最佳位置whl更新迭代计算公式如下: whl=whl-1+vjl (10) 其中,d1、d2为学习因子,d1、s2为[0,1]中的随机数值。 在利用粒子群优化算法[10-11]对目标函数展开求解时,发现求解过程中伴随着大量离散问题[12]。为了解决电动汽车有序充电目标函数求解过程中的离散问题,本文方法利用二进制编码[13]方式对传统粒子群优化算法展开优化,利用优化后的粒子群优化算法对目标函数解集展开全局寻优。若vjl取值大于0,则需要对粒子当前位置作出调整,并使粒子位置取值接近于1;若vjl的取值为0,则粒子保持当前位置不变;若vjl的取值小于0,需要对粒子当前位置做出调整,并使粒子位置接近于0。 (11) 其中,wj(l-1)表示空间内的单独粒子最优位置,wh(l-1)表示全局最优位置,vjl表示粒子飞行位置为1时的概率,rand(ζ)表示0~1范围内的随机数。 将电动汽车的充电状态作为空间内粒子在不同维度的坐标,根据实际应用情况对空间内的粒子速度及位置展开初始化处理,并利用式(11)对空间内粒子的速度及位置展开全局寻优,目标函数minG的优化结果为 (12) 基于粒子群优化算法的全局寻优流程如图2所示。 图2 粒子群优化算法的全局寻优流程图 为了验证本文方法的可行性,选取某家用纯电动汽车进行仿真测试,其额定充电功率为3.3 kW,视额定充电功率为其最大充电功率,电动汽车参数如表1所示。SOC剩余量SOCk0为0.9;粒子群个数n为1000;粒子的速度范围限制在[-1,1],惯性权重ϑ=0.8,学习因子迭代初值d1=1.4、d2=1.4,最大迭代次数为1000。 表1 电动汽车相关参数 考虑到出行规律以及计算方便,将一天的充电时间设置为20:00~次日8:00,某充电站的充电桩如图3所示。充电桩为直流充电桩;充电桩功率为30 kW;充电费用0.5元/kWh。 图3 某充电站充电桩 结合1.1小节分析可知,影响驾驶人员行为习惯的主要因素为驾驶习惯、充电习惯、出行习惯等3类。为了验证本文构建的电动汽车充电负荷模型可以实现有序充电的多目标优化,因此设计适应性实验进行分析。通过在不同时间段不同地区收集驾驶行为记录、充电记录、出行模式记录等驾驶数据、充电数据和出行数据,了解驾驶人员的行为习惯是否随着时间的变化而改变。根据准确率的高低判断构建模型在长期使用中的适应性和稳定性,其结果如图4所示。 图4 适应性实验结果 分析图4可知,本文构建模型获取的7个区域驾驶数据、充电数据和出行数据准确率均在90%以上,证明本文构建模型受地区差异影响较小,具有较高的适应性。可以看出:区域3的驾驶数据准确率是7个区域中最低的,可能是因为该地区的驾驶人员更倾向于进行长途驾驶,在长途驾驶前进行充电,以确保电量充足;区域2的充电数据准确率是7个区域中最低的,可能是因为该地区的驾驶人员倾向于频繁进行快速充电,利用本文构建模型可以引导其改变充电策略,采用定时充电或慢充电方式,以降低充电成本和减少对电网的负荷;区域1的出行数据准确率是7个区域中最高的,可能是因为该地区的驾驶人员通常在特定时间段经过某个区域,提升了准确率,因此建议其在该区域附近的充电站进行充电,以便满足充电需求。综上所示,虽然本文构建模型因为区域、驾驶行为习惯的不同,准确率出现了一定的波动,但是整体而言,本文构建模型具有较优的适应性和稳定性,并可以有针对性地对电动汽车进行引导。 分别采用本文方法、文献[3]方法、文献[4]方法对该电动汽车充电行为展开有序充电优化,并比较不同优化方法下的充电站日负荷情况。负荷的整体波动幅度越小,则对应方法的电能分配效果越好,具体比较结果如图5所示。 图5 充电站负荷比较 分析图5可知:无序充电情况下在20:00~次日8:00时电动汽车充电站内的负荷波动较大,利用本文方法对该电动汽车展开有序充电部署后,负荷峰值明显下降,且充电站当日负荷整体在2000~2500 kW区间波动,波动情况趋于平缓;采用文献[3]方法进行有序充电,负荷在24:00时快速上升,7:00快速下降,波动幅度较大;运用文献[4]方法进行有序充电时,负荷情况在3:00之前呈现上升状态,且一直上升到3500 kW,上升幅度较大,且在整个充电过程中,存在2次较大波动。综上所示,本文方法的电能分配效果较好。 如果电网中的电压存在偏移,比如电压过低或电压过高,使充电装置无法适应或不具备自适应功能,就会导致充电速度减慢或充电失败,影响用户使用体验。同时,电网电压偏移对电池充电还可能产生其他的意外后果。因此,为保障电动汽车充电的顺畅和安全,利用同款车型,且电量剩余为20%的电动汽车,在区域范围设置10个网络节点,分别利用本文方法、文献[3]方法、文献[4]方法对车辆展开有序充电设计,并测试不同方法造成的电压偏移情况。具体比较结果见表2。 表2 电压偏移对比 分析表2可知:利用本文方法对10个网络节点展开有序充电策略实施后,造成的电压偏移量在3.00%之内,偏移量较小;利用文献[3]方法对第9个网络节点展开有序充电策略后,电压偏移量为7.34%,且整体电压偏移量在6.00%左右;利用文献[4]方法对第8个网络节点展开有序充电策略后,电压偏移量为7.95%,且整体电压偏移量在7.00%左右。由此可知,本文方法的电压偏移量较小,可以保障电动汽车充电的顺畅和安全。 当电动汽车充电时,需要从电网中获取电能,而电能在传输的过程中会有一定的损耗,也就是网损。如果网损率较高,说明电网能量传输效率较低,电能的丢失也就比较多,这会影响到电动汽车充电时的供电效率和充电速度。采用本文方法、文献[3]方法、文献[4]方法分别对该充电站的电动汽车充电行为展开有序优化,采集该充电站24 h电网系统损耗数据,并分析有序充电策略实施后24 h内的网损率变化情况。具体网损率比较情况如图6所示。 图6 网损率对比 观察图6可知:本文方法在电动汽车充电过程中的网损率在2%左右;文献[3]方法在电动汽车充电9 h时,存在3%的网损率;文献[4]方法在电动汽车充电8 h时,存在3.5%的网损率。本文方法对区域范围内的电网损耗波动平稳,可以提高电能传输效率和稳定性,以确保电动汽车的充电速度和安全性。 为降低电动汽车规模性介入对电力系统的损耗,需要对电动汽车的有序充电方法展开研究。本文通过对电动汽车驾驶人员驾驶行为与充电习惯的分析,建立电动汽车充电负荷模型,采用粒子群优化算法和二进制编码进行有序充电多目标优化,得到了有序充电的最优策略。通过比较可知,采用本文方法对电动汽车进行有序充电多目标优化后,充电桩的负荷在2000~2500 kW区间波动,波动情况趋于平缓,电压偏移量在3.00%之内,偏移量较小,网损率在2%左右,有效降低了电网的损耗率,保障了电力系统的平稳运行。2.2 基于粒子群优化算法的全局寻优


3 仿真与分析
3.1 仿真设置
3.2 结果分析

4 总结