燃气尾喷对水下航行体通气空泡形态及表面压力的影响①
2023-08-30陈学军祁晓斌张祯旖范文涛
陈学军,王 瑞,祁晓斌,2*,张祯旖,范文涛
(1.西北机电工程研究所, 咸阳 712099;2.西北工业大学 航海学院,西安 710072;3.海军装备部, 西安 710054)
0 引言
水下航行时由于粘性阻力,物体运动会受到很大影响,但当运动物体达到一定速度后,在物体表面水以水蒸气形式形成一层气态超空泡,使得物体沾湿面积减小,从而减小粘性阻力。利用超空泡减阻效应[1-3]可有效减少90%的水中阻力,但当航行体表面大部分被空泡包围,会失去水的浮力作用,通常需要增加尾喷以平衡自身重力以及所受的阻力。水下航行体采用火箭发动机作为动力来源,其尾部高速喷流会对航行体尾部附近的流场产生巨大扰动。因此,开展带尾喷航行体空泡形态与流体动力特性研究,可为水下航行体运动预测及性能评估提供借鉴。
国内外学者围绕通气航行体空泡形态及流体动力特性展开了大量研究。1946年,REICHARDT[4]提出通过人工通气的方式生产超空泡,随后借鉴该思想开启了通气空泡研究;MARTIN等[5]通过水洞实验研究通气空泡形态及其尾流变化;LEE等[6]研究不同通气空泡对航行体的流体动力学作用;KAWAKAMI等[7]通过实验分析了包含锋利边缘的不同圆盘结构形成的通气空泡特性;SKIDMORE等[8]研究了通气空泡的振动和噪声特性机理;ASHISH等[9]研究不同弗劳德数、空化器尺寸及流动不稳定性下通气空泡形成和坍塌过程的气体流动特性;张孝石等[10-11]分析了不同空化数下水下航行体表面云状空泡稳定性及局部空泡对航行体表面压力特性影响机理。何晓等[12]基于全空化模型开展了数值模拟,着重研究了在有尾喷燃气射流的情况下自然空泡与之发展的非定常过程;薄芳[13]利用Mixture及VOF模型,对氢-氧发动机航行体的自然和通气超空泡进行了数值模型,得到推进器尾喷流对空泡的影响规律;胡勇等[14]基于有限体积法模拟了超空泡航行体尾部燃气射流与通气空泡的相互作用,研究了通气量和燃烧室总压对它的影响;刘平安[15]对发动机尾喷流与空泡流场相互作用进行了数值模拟,得到了不同流场及结构参数下尾喷对空泡形态及流体动力影响;裴譞等[16]在高速水洞中进行了系列实验研究,探究了不同尾喷管长度条件下空泡形态与其力学特性的影响;许昊等[17]研究了由亚、超声速气体射流引起的航行体尾空泡的瞬时及时间平均形态。综上所述,目前在通气超空泡实验方面已经做了大量的研究工作,在尾喷流对超空泡化流场的影响研究方面主要采用数值模拟手段,通过实验手段研究尾喷流对通气航行体影响的文献则较少。赵小宇等[18]通过构建通气空泡与超声速尾喷流耦合作用实验系统,重点研究了射流与通气空泡相对位置对空泡射流耦合作用机理的影响,而在攻角作用下尾喷流对通气空泡形态及航行体表面压力的影响研究方面尚未有文献报道。
本文通过水洞实验并采用高速摄像方法得到了尾喷流对通气空泡形态及表面压力影响结果,给出了尾喷过程中出现的典型现象,并结合相关文献分析了典型现象产生机理及模型表面压力的变化规律。
1 实验系统与模型参数
实验主要依托哈尔滨工业大学循环式高速通气空泡水洞实验系统,如图1所示,其中工作段的长度为1 m,横截面为260 mm×260 mm的正方形。为了便于观察工作段上下及前后侧面装有透明的有机玻璃,方便通过高速摄像观察空泡形态。水洞尾水罐可以移除通气实验产生的气泡,可进行长时间连续通气实验。本实验由模型支撑系统、通气调节系统、高速摄像系统、压力采集系统、尾喷触发系统等组成,如图2所示。其中传感器数据线和尾喷触发线由头支撑引入;通过定攻角支撑杆实现模型的不同攻角条件;尾喷触发系统外接5 V电压,导线与尾喷熔丝相接,电路连通后熔丝燃烧触发尾喷。
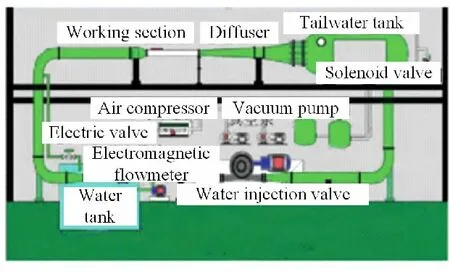
图1 水洞示意图Fig.1 Schematic diagram of water tunnel
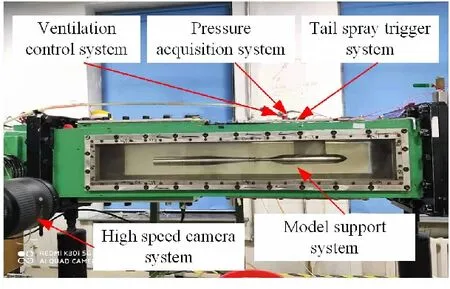
图2 实验系统示意图Fig.2 Schematic diagram of test system
实验使用的航行体模型为铝合金材质,模型示意图如图3所示。其中蓝色图形表示传感器位置。模型主要参数尺寸及测压点位置见表1。
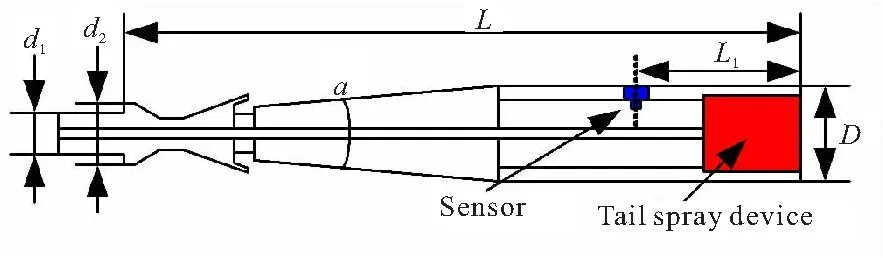
图3 带尾喷模型示意图Fig.3 Schematic diagram of underwater vehicle model with tail jet

表1 头支撑模型几何尺寸Table 1 Geometry size of head support model
本次实验采用可替换尾喷模块,尾喷模块选用型号D5-0模型火箭发动机,通过适配件与航行体模型连接,适配件1安装在模型弹内测与弹壁面固结,适配件2与适配件1相配合用于固定燃气发生器。点火装置在弹内,点火线通过适配件1和适配件2,如图4所示。尾喷模块工作时间约4 s,质量流量约6.8 g/s。在进行一次尾喷实验后,需要拆换新的尾喷模型,并做好相应的防水处理。
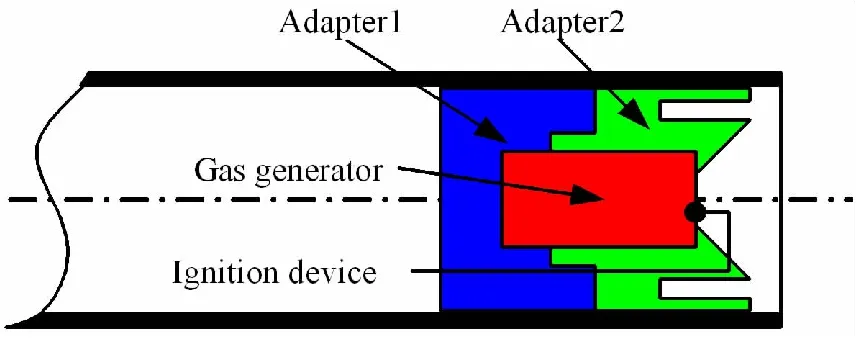
图4 尾喷模型示意图Fig.4 Schematic diagram of tail jet model
实验中通气流量系数定义为
(1)

对于一个随机信号,为了研究其内在规律,频谱分析是研究其内在规律的最基本的分析方法之一。在频谱分析模块中,时域数据经过FFT变换后得到其傅里叶谱的幅值谱。快速傅里叶变换傅里叶变换的定义为

(2)
式中ω=2πf;f(t)为时域序列;F(ω)为频域的谱函数序列。
2 实验结果分析
2.1 尾喷对空泡形态影响
通过实验得到了不同攻角、来流速度和通气量下的空泡形态及压力特性。由于头部支撑流场扰动较大,通气空泡波动较大,对采集的连续瞬态图片平均化处理,得到较为光滑的通气空泡形态图片。
图5展示了尾喷实验中出现的“退泡”及“颈缩”现象。图5(a)~(d)对应的通气空泡尺寸逐渐增大,红色实心圈表示压力传感器位置。对比(a)和(b)可以看到,随着通气空泡闭合点靠近模型尾部,尾喷发生后,上侧通气空泡闭合点朝模型头部前移尺度增大(见蓝色虚线标识),本文中将这种现象称为“退泡”现象。对比(c)和(d)发现,上侧通气空泡基本覆盖整个模型,(d)中形成通气超空泡,此时尾喷发生后,可以观察到上侧的通气空泡径向尺寸减小,在(d)中可以看到更为明显的“颈缩”现象。文献[11-12]中对“颈缩”现象进行相关研究,结合本文分析其机理:通气空泡受到高压喷流的引射/带走作用,当通气流量恒定,模型尾部气体流速增大时,空泡径向尺寸减小以实现质量守恒。与文献不同,“退泡”现象发生在局部通气空泡情况,分析其形成机理:在局部通气空泡状态下,尾喷的引射/带走作用影响相对较小,主要原因为尾喷高压向上游传播,造成模型尾部附近压力升高,影响通气空泡发展,闭合点前移。

(a)α=0,v=6 m/s,Cqs=0.18 (b)α=0,v=10 m/s,Cqs=0.17
(c)α=0,v=8 m/s,Cqs=0.22 (d)α=0,v=10 m/s,Cqs=0.23图5 尾喷过程中的“退泡”及“颈缩”现象Fig.5 Phenomenon of “de-bubbling” and “neck-shrinking” in the process of tail jet
图6展示了相同通气量Cqs=0.23和来流速度v=10 m/s,攻角α分别为2°和4°的“颈缩”现象。从图6可看到,α=2°时,尾喷造成的“颈缩”明显,其中下侧空泡闭合位置前移幅度较大。随着攻角的增大,通气空泡未能全包裹模型,通气空泡尺寸略微减小,即“颈缩”现象大幅度削弱。分析认为,攻角会引起空泡轴线变形使得空泡发生上漂现象[19],随着攻角越大,空泡上漂现象加剧。当α=4°时,航行体上下两侧空泡发展不对称更加明显,航行体下表面出现大面积沾湿,尾部端面发生二次空化形成尾空泡,由于空泡轴线与尾喷射流中心轴线的夹角增大,尾喷流动量在空泡轴线方向的分量减弱,即通气空泡受到高压喷流的引射/带走作用减弱,进而空泡的“颈缩现象”呈减弱趋势。
(a) α=2° (b) α=4°图6 不同攻角下的“颈缩”现象Fig.6 “Neck-shrinking” phenomenon at different attack angles
为了进一步研究尾喷对通气空泡形态的影响,图7给出了空泡“颈缩”现象中的尾喷点火及熄火过程,其中t0=0.1 s(连续的100张图片平均处理)。由图7可知,空泡“颈缩”现象在点火后极短时间内形成,其形成时间T≈0.3 s。当尾喷结束后,空泡“颈缩”现象逐渐减弱,空泡形态同样在短时间内恢复。

(a) Ignition (b) Flameout图7 尾喷点火与熄火对通气空泡影响Fig.7 Effect of ignition and flameout of tail jet on ventilation cavitation
2.2 尾喷对航行体表面压力的影响
与图5对应,图8给出了空泡“退泡”至“颈缩”过程中模型表面压力时域变化。在实验过程中,图8(a)~(c)对应的通气流量先恒定再动态变化,因此未能得到完整时间内的压力对比。对比分析发现,图8(a)~(b)中尾喷对模型表面压力影响较大,压力波动增强,幅值较大。“颈缩”状态下,模型表面压力波动与幅值变化较小,这可能与尾部附近的回射流减弱有关:局部通气状态下,尾喷高压形成的回射流较为强烈,对模型的压力影响较大;当通气空泡包裹整个模型时,尾部附近为气体,回射流现象减弱,对压力影响减小。另外,在尾喷触发的初始阶段,模型表面压力变化较小,这可能与传感器位置较远,尾喷高压前移时间较长有关。

(a)α=0,v=6 m/s,Cqs=0.18 (b)α=0,v=10 m/s,Cqs=0.17

(c)α=0,v=8 m/s,Cqs=0.22 (d)α=0,v=10 m/s,Cqs=0.23图8 “退泡”至“颈缩”现象过程中的模型表面压力变化Fig.8 The change of model surface pressure during the process from “de-bubbling” to “neck-shrinking”
与图6对应,图9给出了不同攻角下,尾喷模型的表面压力时域变化。对比有/无尾喷的压力曲线,可知攻角为0°(见图8(d))和2°时,通气空泡基本覆盖整个模型,此时尾喷对模型表面压力影响较小。攻角增至4°时,通气空泡未能覆盖整个模型,尾喷持续过程中增大模型表面的平均压力。
(a)α= 2°

(b)α= 4°图9 “颈缩”状态下攻角对模型表面压力影响Fig.9 Influence of attack angle on model surface pressure in “neck-shrinking” state
图10给出了图8对应的频域分析。可以看到,“退泡”工况压力的低频(1~30 Hz)振幅普遍增大,其中影响较大的频域范围为1~10 Hz。在“颈缩”工况中,随着通气空泡覆盖面积增大,尾喷对压力影响减小,1~8 Hz范围的压力振幅呈减小趋势,与文献[11]中发现的现象相吻合。在10 m/s流速时,压力出现9 Hz左右的波动,这可能与模型的振动有关(流速减小为8 m/s时频率减小)。同时,图10(a)~(d)均存在5 Hz左右的压力波动,在图10(b)和(d)中尤为明显。分析认为,该压力波动可能由流场扰动形成的通气空泡波动造成。
(a)α=0,v=6 m/s,Cqs=0.18 (b)α=0,v=10 m/s,Cqs=0.17
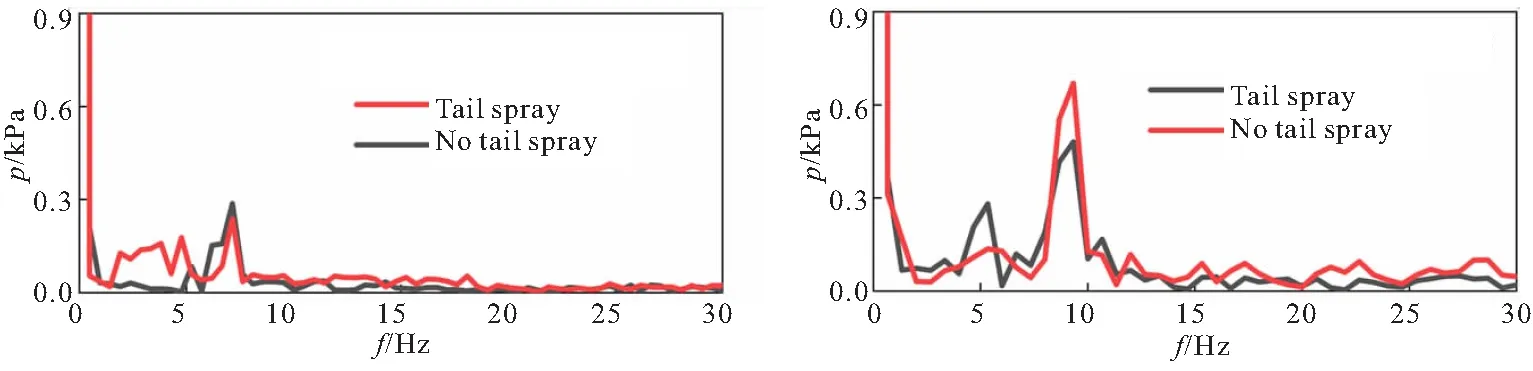
(c)α=0,v=8 m/s,Cqs=0.22 (d)α=0,v=10 m/s,Cqs=0.23图10 “退泡”至“颈缩”过程中的模型表面压力频域分析Fig.10 Frequency domain analysis of model surface pressure during the process from “de-bubbling” to “neck-shrinking”
图11为图9对应的压力频域分析。结合实验图像发现相同条件下,当攻角增大时,模型的通气空泡覆盖面积减小。对比压力频谱可以看到,攻角增大时,与无尾喷相比,1~10 Hz范围内的压力振幅呈增大趋势。此外,在模型振动的基础上,尾喷会增大模型振动造成的压力幅值。
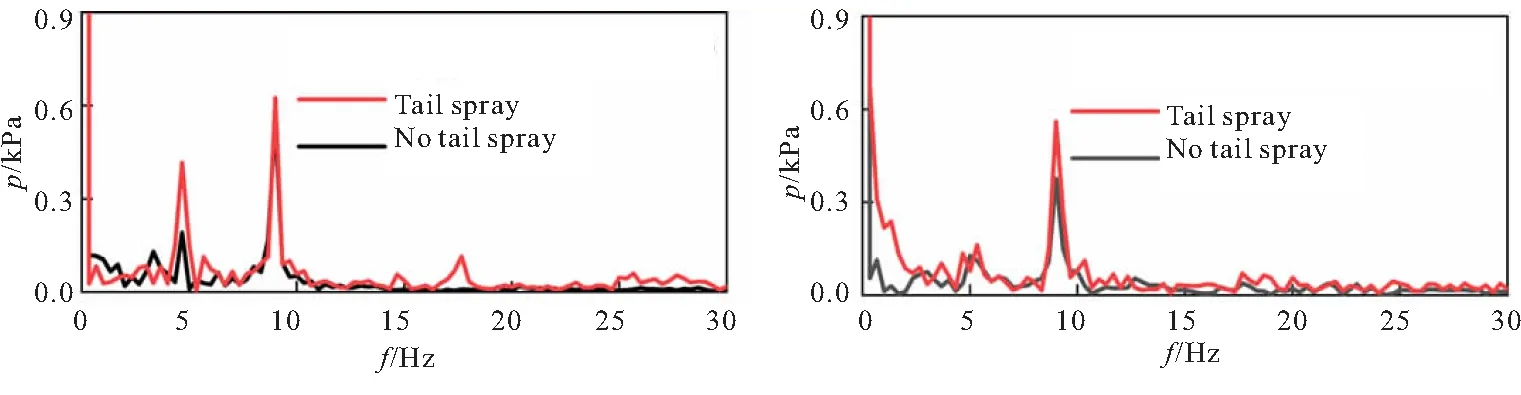
(a)α= 2°,v=10 m/s,Cqs=0.23 (b)α= 4°,v=10 m/s,Cqs=0.23图11 “颈缩”状态下攻角对模型表面压力的频域影响Fig.11 Influence of attack angle on model surface pressure in frequency domain under “neck-shrinking” state
3 结论
基于带尾喷模型通气实验系统,进行不同攻角、来流速度和通气流量下的尾喷实验,获得了不同参数下尾喷对通气空泡形态及表面压力影响,主要结论如下:
(1)不同攻角、来流速度和通气流量,均能影响通气空泡的覆盖程度。相同攻角下,随着通气空泡覆盖率增大,尾喷对通气空泡的影响经历了“退泡”至“颈缩”的发展;在其他条件不变的“颈缩”状态下,随着攻角的增大,通气空泡的“颈缩”现象减弱;“颈缩”现象的形成/消失与尾喷的点火/熄火密切相关,在尾喷航行体设计中需要重点考虑点火时序的选择。
(2)局部通气空泡状态下受强回射流作用,尾喷对模型表面的压力影响较大;通气超空泡状态下尾喷高压造成的回射流现象减弱,对模型表面压力影响较小。
(3)无攻角航行体的局部通气空泡状态下,1~30 Hz范围内的表面压力振幅与无尾喷相比呈增大趋势;通气超空泡状态下,1~8 Hz范围内的表面压力振幅与无尾喷相比呈减小趋势。其他条件相同的“颈缩”状态下,随着攻角增大,与无尾喷相比,1~10 Hz范围内表面压力振幅变化总体呈增大趋势。
