高精度球面洛伦兹力磁轴承设计与分析
2022-11-30傅百恒王卫杰王元钦樊亚洪聂辰贾海鹏
傅百恒,王卫杰,王元钦,樊亚洪,聂辰,贾海鹏
(1.航天工程大学 研究生院,北京 101416; 2.航天工程大学 宇航科学与技术系,北京 101416;3.北京控制工程研究所,北京 100190; 4.中国人民解放军63961部队,北京 100020)
高分卫星对地观测时,卫星的姿态稳定度及超静性能是相机清晰成像的关键[1-6]。作为航天器姿态控制的一种磁悬浮解决方案,磁悬浮控制敏感陀螺(magnetically suspended control and sensing gyroscope,MSCSG)融合了高精度控制力矩输出和载体姿态敏感测量的功能,可输出大于1N·m、带宽大于100Hz的偏转力矩[7-10]。洛伦兹力磁轴承(Lorentz force magnetic bearing,LFMB)作为MSCSG的功能部件,其性能好坏决定了MSCSG能否实现高精度敏感控制[11-15]。
LFMB主要由转子磁钢环和定子绕组构成,磁钢环提供稳定的气隙磁场,绕组置于其中。绕组对置通电后产生安培力形成力偶以控制转子偏转,以陀螺实现高精度敏感控制。文献[16]通过仿真指出柱面LFMB的气隙磁密分布不均是产生干扰力矩、引起测量误差的主要因素,该干扰力矩会随着气隙磁密的不均匀度增大而增大,最终影响MSCSG的控制敏感精度。文献[17-18]通过MSCSG的控制敏感公式指出,由于气隙磁密已给定,当输入陀螺的扰动越小时,LFMB所需的敏感电流越小,导致在信噪中难以分辨该电流信号,若适当减小气隙磁密,可增大敏感电流。文献[19-20]在柱面LFMB的内外永磁体靠近气隙一侧增加了铁镍软磁合金(1J50)导磁薄片,由于增加了磁阻,气隙磁密降低,但其均匀度提升并不明显,不能提高LFMB的控制敏感精度。
此外,研究人员还将LFMB应用于磁悬浮隔振平台。文献[21]利用LFMB高精度控制的优点,设计了一种主被动结合磁悬浮隔振平台,该平台针对100Hz以下的振动,其六自由度的加速度峰值可削弱90%以上,但由于LFMB的控制行程有限,难以补偿100Hz以上的振动。
综上可知,提高LFMB气隙磁密的均匀度、并适当降低磁密是MSCSG实现高精度控制及敏感测量的关键方法,而扩大转子偏角又可提高MSCSG应对复杂工况时持续输出力矩的性能。因此,根据设计要求,本文提出了一种气隙磁密均匀度较高、转子偏角较大的球面LFMB设计方法。通过仿真结果可知,球面LFMB不仅能够有效提高气隙磁密的各向均匀度,增大了转子偏角,拓宽了球面LFMB高精度控制的区间,为MSCSG提高控制敏感精度、扩大适用工况奠定了基础。
1 MSCSG高精度测控机理分析
1.1 基于微框架的MSCSG测控机理
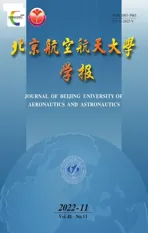
MSCSG主要由无刷直流电机、轴向磁轴承、径向磁轴承、LFMB、位移传感器等部件组成,如图1所示。轴向、径向磁轴承协同控制转子的三自由度平动悬浮,LFMB控制转子的二自由度径向偏转,转子可实现五自由度全主动稳定悬浮,消除了定转子之间的摩擦,使得电机驱动转子实现可控的高速旋转,提高了陀螺的运行寿命及可靠性。此外,轴向及径向磁轴承的定转子磁极面均设计为球面,在转子偏转前后,其磁极面之间的气隙宽度不会发生变化,电磁力始终垂直于球形转子表面,以此消除转子平动对偏转控制的影响。
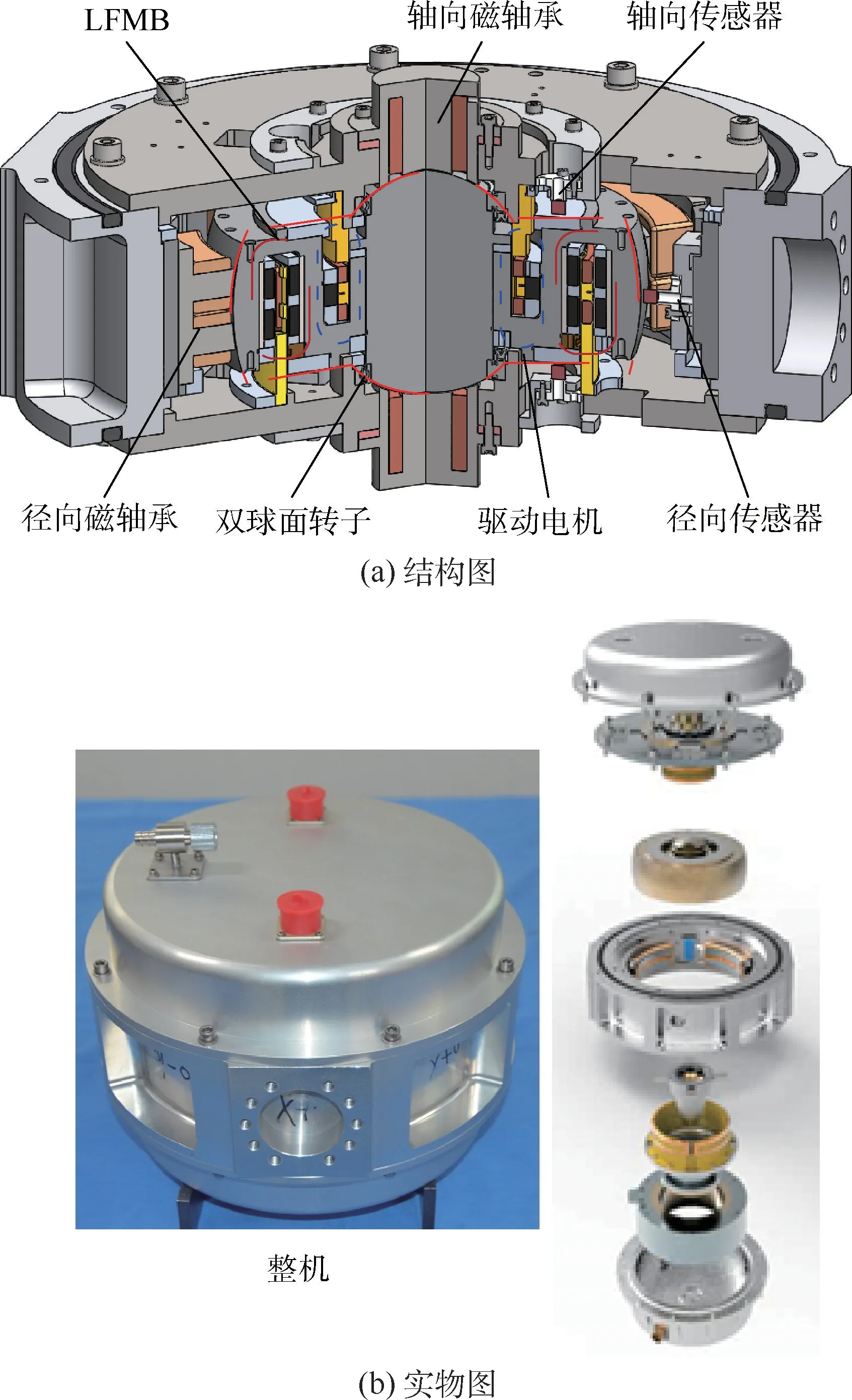
图1 MSCSG结构与实物图Fig.1 Structure diagram and material object of MSCSG
MSCSG利用LFMB控制高速旋转的转子偏转以跟踪载体位姿变化实现敏感测量,及产生动量差形成控制力矩,利用LFMB实现一体化测控方案实现过程如下:当平台扰动传递至陀螺时,MSCSG对姿态变化进行敏感测量,转子由于高速旋转保持定轴性,不会跟随定子偏转,利用位移传感器测量定转子的相对位移,解算位移可得转子相对定子的偏角,再往LFMB通入敏感电流以控制转子偏转至扰动前,此时检测定子对置绕组的敏感电流差,可得陀螺的位姿变化角速度;根据敏感测量所得角速度,再往LFMB通入控制电流,以对转子沿径向二自由度施加力偶控制转子瞬时偏转,则在微框架效应下,由转子偏转产生的动量差将转换为陀螺力矩,来抵消或补偿扰动,该过程即为MSCSG控制力矩的输出过程。
LFMB通过控制转子的二自由度万向偏转使MSCSG实现控制敏感功能,因此,对LFMB控制精度的要求较高。
1.2 MSCSG高精度测控的影响因素分析
根据1.1节中MSCSG的测控机理可知,衡量LFMB性能优劣主要有以下两方面:①力偶的控制精度;②对微小扰动的敏感测量精度。
1)影响敏感测量精度的因素
MSCSG姿态敏感是通过测量转子相对于惯性空间的姿态角速率得到,该角速率正比于LFMB定子对置绕组的电流差,敏感式为
式中:B为气隙磁密强度;Lr为LFMB定子骨架半径;Ω为陀螺转速;Jz为转子的极转动惯量;ωBx、ωBy分别为姿态角速率沿x、y轴的分量;I4-I2、I3-I1分别为在x、y轴上2组对置绕组的电流差。其中,陀螺转速及极转动惯量由实际情况给定。
通过检测LFMB对置绕组电流差,解算得到陀螺的姿态角速率。然而当气隙磁密强度较大而由外部输入陀螺的扰动较小时,LFMB绕组内的敏感电流将相应减小,导致其信号在信噪中的分辨率过低,难以检测,使得MSCSG无法实现对微小扰动的敏感测量,且气隙磁密的不均匀分布也将进一步影响LFMB的偏转控制精度。
2)影响力矩控制精度的因素
MSCSG二自由度(绕x或y轴)的控制力矩为

式中:n为单个绕组匝数;φ为单个绕组有效周向长度所对应的圆周角;I2和I3分别为对置绕组的电流大小。其中,Ii是控制量,由敏感所得位姿信息决定,n、Lr、φ、B是已知量,由陀螺设计给出。
由于洛伦兹力的大小、方向、磁场强度、绕组与磁场夹角有关,若气隙磁密的均匀性较差,则在轴截面范围内,安培力分布并不均匀,LFMB无法控制转子进行高精度偏转,使得MSCSG不能输出高精度力矩来补偿载体振动,且当转子偏转后,磁场与绕组的夹角小于90°,加剧了洛伦兹力分布的不均匀性。此外,传统LFMB定转子均为柱面结构,其控制转子偏转的持续输出时间短,导致转子瞬时偏转产生的动量包络范围受限,MSCSG难以持续输出力矩来补偿载体的高频振动。
2 高精度球面LFMB设计
为提高MSCSG的控制敏感精度,针对柱面LFMB,将围绕以下两方面进行设计:①提高绕组所处气隙磁密的均匀度;②扩大转子的偏转角度。
研究发现,在磁钢靠近气隙一侧增加导磁材料,一方面可提高气隙磁密的均匀度,但会削弱磁密,另一方面导磁结构无需充磁,不影响磁路。气隙宽度保持不变,为扩大转子的偏角,将气隙设计为球面转子的同心球壳,本文提出了一种球面LFMB的设计方案:在转子柱面磁钢靠近气隙一侧,设计与转子球心重合的铁钴钒软磁合金(1J22)球面导磁结构,则气隙形状由圆柱环变为球壳状,定子绕组及骨架的形状相应地由柱面改为与转子球心重合的球面。
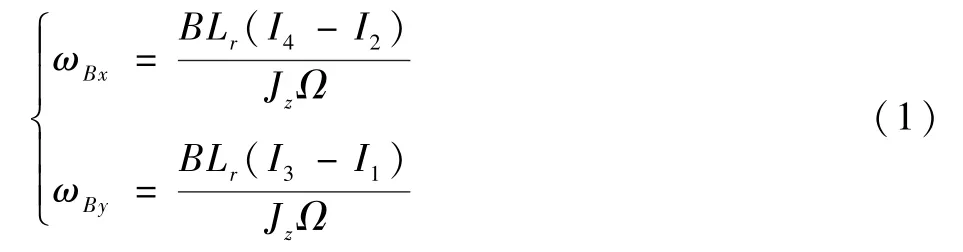
由于增加球面导磁结构不影响球面LFMB整体磁路的闭合,为保证转子偏转后绕组边缘仍处于均匀磁场中,磁钢的轴向高度也做调整。根据设计要求,球面LFMB的结构设计如图2所示,其主要参数设计和计算结果如表1所示,球面LFMB设计偏转角度由柱面LFMB的±0.6°扩大至±2°,磁钢的轴向高度相应增加2mm。
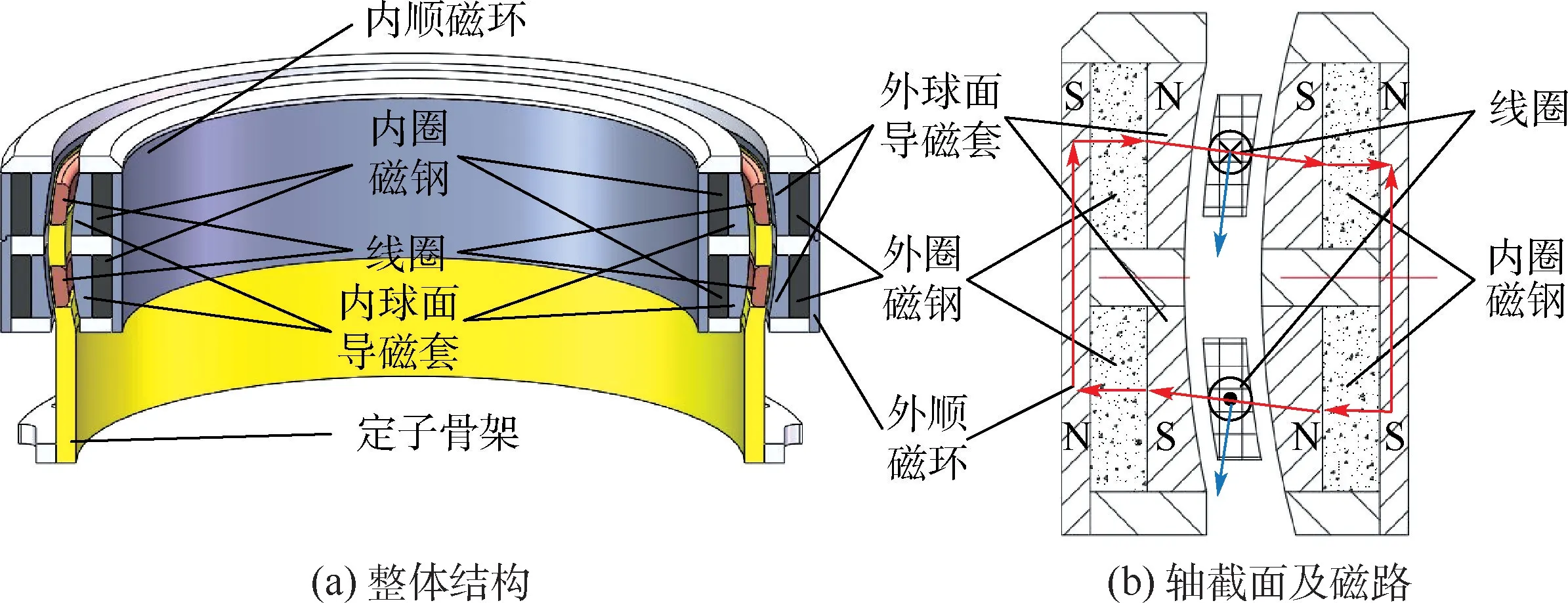
图2 球面LFMB整体结构示意图Fig.2 Overall structure diagram of spherical LFMB
表1 两种LFMB主要参数Table1 Main design parameters of two LFMBs
结合实际加工、装配环节,由于气隙形状的改变,使得球面LFMB的装配方式较柱面有了很大变化。柱面LFMB在转子装配完成后,定子可竖直滑配进入气隙中。但对于球面LFMB的装配,由于球面结构,定子上沿直径小于内隔磁环直径、定子中心直径大于外导磁套下沿直径。因此,若将球面LFMB的转子部分一次性装配完成,则无法将定子竖直滑入气隙中;若扩大气隙宽度,将会大幅削弱气隙磁密,影响气隙磁路闭合,导致球面LFMB无法正常工作。
因此,考虑到球面LFMB的装配难度及可行性,本文还提出了一种球面LFMB装配方法,如图3所示。首先,将定子绕组内置于骨架以增大定子上沿直径,保证定子上沿能够竖直通过内隔磁环;其次,将球面LFMB的外转子分为上、下组件,其上组件和内转子先装配组成上半部分气隙,在定子竖直滑配进入气隙后,再将外转子下组件滑配至气隙中,从而保证了定转子各自的装配空间不发生冲突。
图3 球面LFMB装配方案Fig.3 Assembly plan of spherical LFMB
3 球面LFMB等效磁路分析
根据柱面及球面LFMB的轴截面结构,建立磁路图,如图4所示。Fp1~Fp4分别为4组磁钢环的磁动势,Rp1~Rp4分别为磁动势对应的永磁磁阻,Rcu和Rcd分别为处于上、下磁钢环间穿过定子绕组的气隙磁阻,Rclu和Rcld分别为上、下磁钢环间未穿过定子绕组的气隙磁阻,Rmi和Rmo分别为内、外导磁环的磁阻,Rmsiu和Rmsou分别为上球形内、外导磁套的磁阻,Rmsid和Rmsod分别为下球形内、外导磁套的磁阻,Rmli和Rmlo分别为内、外导磁环未经过导磁环的漏磁磁路气隙磁阻,φu和φlu分别为上气隙出穿过和未穿过绕组的磁通,φd和φld分别为下气隙出穿过和未穿过绕组的磁通。
图4 磁路图Fig.4 Magnetic circuit diagram
忽略定子绕组磁阻及磁钢漏磁及边缘效应可得等效磁路,如图5所示,柱面与球面磁路的区别在于是否有球面导磁结构,如虚线框标示。
图5 等效磁路图Fig.5 Equivalent magnetic circuit
根据图5可知,由于外导磁环磁阻Rmlo与外磁钢磁阻Rmo为并联磁阻,内导磁环磁阻Rmli与内磁钢磁阻Rmli为并联磁阻,而导磁环磁阻可近似为0,并联后电阻也为0,最终LFMB气隙内的主磁通φs为
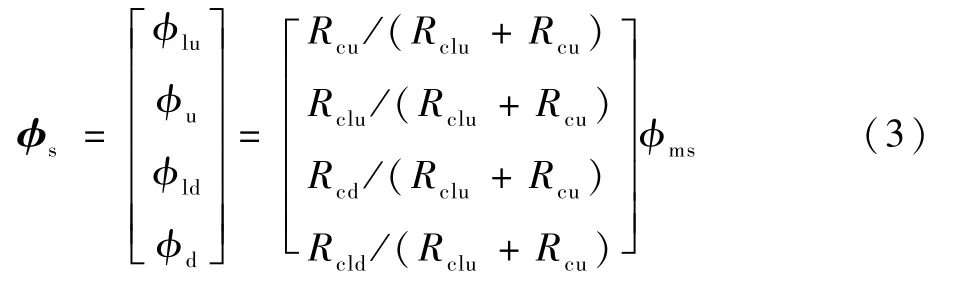
式中:φms为通过LFMB绕组的气隙主磁通。
式中:Fp1~Fp4为磁钢的磁动势;lpi为磁钢磁化长度。由式(4)可知,2种LFMB主磁通差异在于靠近气隙处的导磁结构磁阻Rms。

根据主磁通可得到对应位置的气隙磁密Bz为式中:Blu和Bu分别为上气隙出垂直为穿过绕组的磁密和穿过绕组的磁密;Bld和Bd分别为下气隙出垂直为穿过绕组的磁密和穿过绕组的磁密;Alu、Au、Ald和Ad分别为气隙磁密强度B对应的4个等效截面积。
由于磁钢所处径向尺寸远大于其磁化宽度,则可假设Fp1=Fp2=Fp3=Fp4=Fp,lp1=lp2=lp3=lp4=lp,且由于2种LFMB均为上下对称的双圈结构,则Rcu=Rcd=Rc,Rclu=Rcld=Rcl,Au=Ad=A,Alu=Ald=Al,Rmsi=Rmsiu=Rmsid,Rmso=Rmsou=Rmsod,垂直穿过绕组的磁密Bu和Bd可写为

由式(8)可知,气隙磁密Bz是关于磁钢磁化长度的增函数、关于磁阻的减函数。其中,磁钢长度相同的情况下,磁阻的大小与气隙磁阻Rc及Rcl、球面导磁结构磁阻Rms、磁通等效面积A有关。球面LFMB比柱面多了一项由球面导磁结构带来的磁阻Rms,由此可分析球面导磁结构对于2种LFMB的气隙磁密强度、各向均匀性的影响。
4 有限元仿真分析
4.1 有限元建模
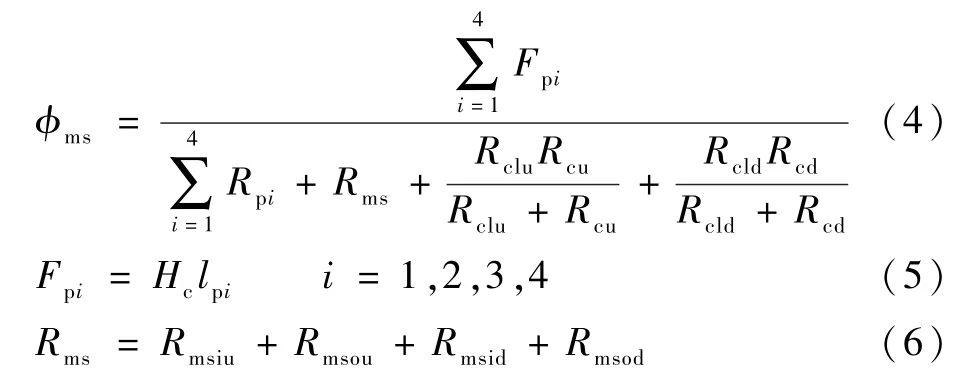
为对比分析柱面及球面LFMB的气隙磁密分布特征,利用ANSYS APDL构建柱面与球面LFMB的电磁仿真模型。图6为2种LFMB的有限元计算模型。设定空气域的磁渗透系数为1,磁钢的磁力系数为79600、磁渗透为1.05,二维面域网格采用自由划分。
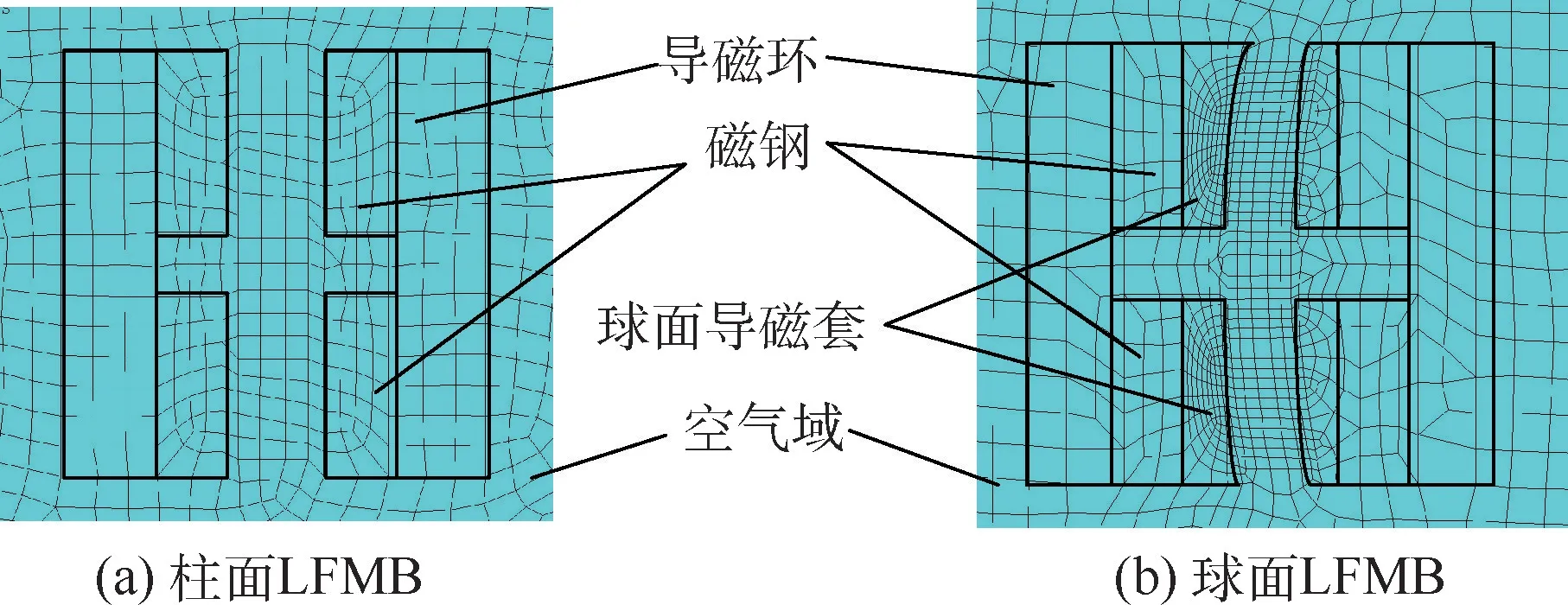
图6 两种LFMB的有限元建模Fig.6 Finite element modeling of two LFMBs
4.2 仿真结果分析
柱面及球面LFMB的气隙磁密云图分布如图7所示。对比可知,球面导磁结构的设计使得球面LFMB的气隙磁密分布比柱面更均匀,说明球面导磁结构具备平顺气隙磁场的作用。球面导磁结构延长了磁路闭合路径,导致磁路磁阻增大,当MSCSG进行控制敏感时,使得球面LFMB需要更大的电流来控制转子偏转。大电流提高球面LFMB功耗的同时,也提升了电流信号信噪分辨率,间接提高了球面LFMB的控制敏感精度。
图7 两种LFMB磁密分布云图及路径Fig.7 Magnetic density distribution nephogram and paths of two LFMBs
进一步分析LFMB的球面设计对气隙磁密分布特征的影响,分别选取了球面及柱面气隙的轴向路径a1及径向路径b1~b3,如图7所示,路径上的磁密分布如图8所示。对比图8(a)轴向路径a1,柱面及球面LFMB的气隙中心的轴向磁密分布关于气隙中点对称、大小相等、方向相反,在绕组截面的轴向范围内,球面LFMB的轴向气隙磁密分布的平顶区域比柱面宽,其中,球面气隙轴向磁密分布在0.33~0.34T之间,柱面气隙轴向磁密分布在0.35~0.51T之间。对比图8(b)径向路径b1~b3,在绕组截面径向范围内,球面LFMB的径向气隙磁密分布的波动比柱面小,其中,球面气隙的3条径向磁密分布在0.32~0.35T之间,柱面气隙的3条径向磁密分布在0.35~0.55T之间。通过图8对比可知,当磁钢径向充磁长度、气隙宽度保持不变的情况下,球面LFMB的轴向、径向气隙磁密分布波动均比柱面小,球面气隙中心磁密较柱面下降了34.1%。
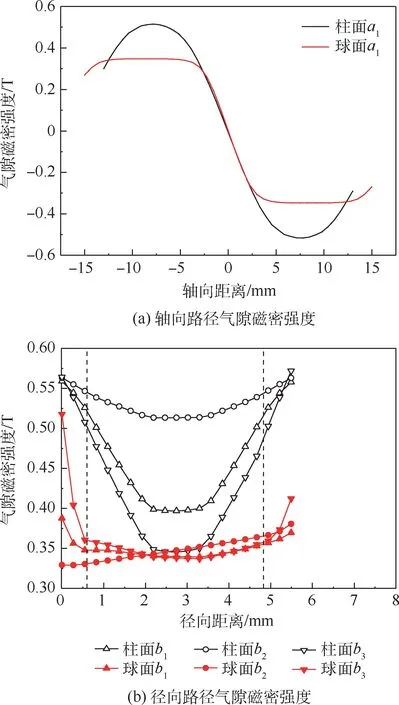
图8 两种LFMB气隙磁密强度分布Fig.8 Magnetic density distribution of two LFMBs
由于式(1)和式(2)中的气隙磁密强度B为设计给定的常值,因此绕组范围内的气隙磁密分布越均匀,则LFMB的控制敏感精度就越高。现引入磁密均匀度以表征气隙磁密的分布,具体评估2种LFMB在转子偏转前后的磁密分布情况,其定义如下:

式中:Bi和分别为绕组范围内选取点的磁密和磁密均值。
图9为2种LFMB绕组相对转子偏转前后的位置示意图,各自绕组范围内的磁密均匀度计算结果如表2所示。由于2种气隙的磁密关于气隙中点对称分布,所以只需分析转子朝一个方向偏转,绕组范围内气隙磁密强度变化。
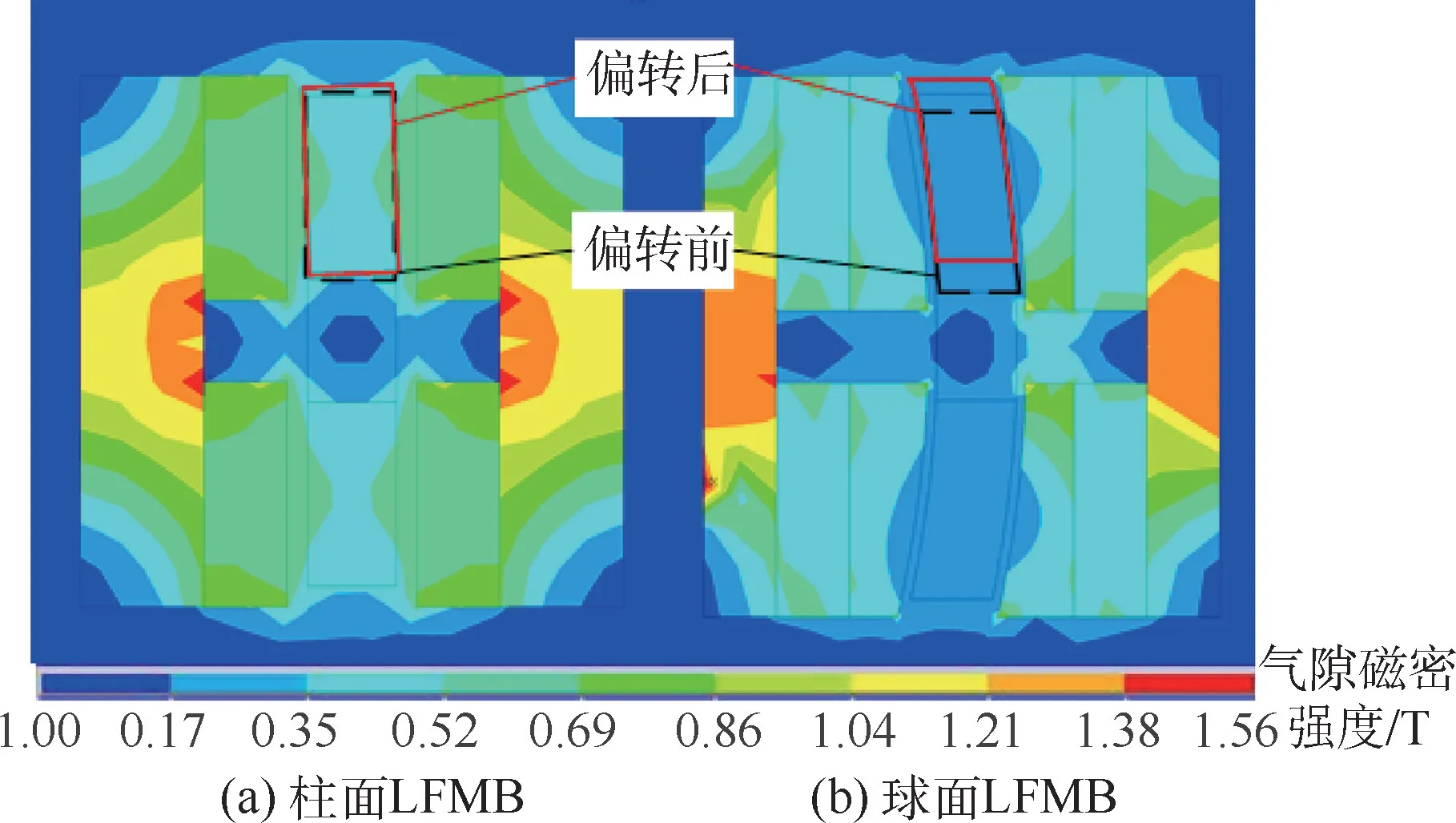
图9 两种LFMB绕组截面偏转示意图Fig.9 Schematic diagram of coil-section deflection of two LFMBs
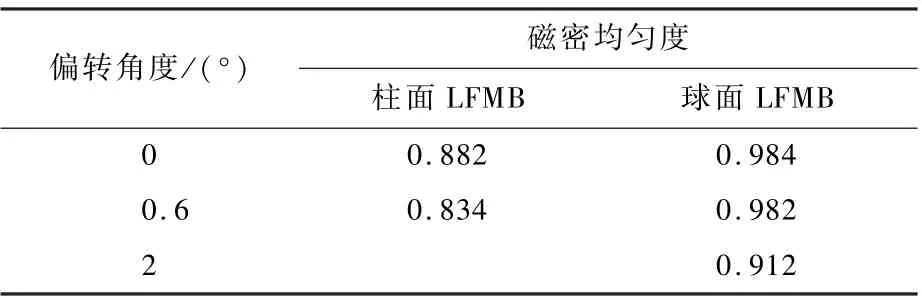
表2 两种LFMB绕组截面范围内磁密均匀度的对比Table2 Comparison of magnetic density uniformity within coil section of two LFMBs
在绕组截面范围内,当转子未发生偏转时,球面LFMB的磁密均匀度比柱面提升了11.6%;当转子偏转0.6°时,球面LFMB的磁密均匀度较柱面提升了17.7%,此时对比各自偏转前的气隙磁密均匀度,球面LFMB仅降低了0.2%,优于柱面LFMB降低的5.4%;当转子偏转2°时,球面LFMB的磁密均匀度较偏转前虽然降低了7.3%,但整体磁密均匀度仍优于转子偏转前的柱面气隙。
通过对比2种LFMB气隙磁密的分布特点可知,球面LFMB气隙磁密的各向均匀度较柱面有了明显提升,虽然球面LFMB增大了磁路磁阻,导致气隙磁密下降、控制敏感电流增大,增加了整机功耗,但大电流可提高LFMB的控制精度。另外,球面LFMB的转子偏角比柱面扩大了3倍,使得控制力矩得以持续输出,增大了MSCSG的动量包络范围,同时在转子偏转前后,球面气隙磁密强度及均匀度的变化均比柱面小,从而提高了转子处于大偏角时球面LFMB的控制敏感精度,使得MSCSG能够实现高精度控制力矩持续输出、转子姿态敏感等性能要求。
5 结 论
根据柱面LFMB在运行过程中存在的控制精度低、持续输出力矩时间短等问题,提出了一种球面LFMB的设计方法,结论如下:
1)球面LFMB工作气隙磁密分布比柱面均匀,中心磁密较柱面下降了34.1%。
2)绕组截面范围内,在转子偏转前后,球面LFMB的气隙磁密均匀度相较于柱面LFMB分别提升了11.6%、17.7%,说明球面导磁结构具备平顺球面气隙磁密分布的作用。当球面LFMB进行控制敏感时,均匀分布的气隙磁密使得绕组范围内产生的电磁力大小均匀,提高了球面LFMB的控制精度。
3)由于球面LFMB允许转子进行±2°的偏转,控制力矩得以持续输出,增大了MSCSG的动量包络范围。且在转子偏转前后,球面气隙磁密大小及均匀度的变化较小,提高了转子处于大偏角时球面LFMB的控制敏感精度。