基于ABAQUS的桁架机器人模态分析
2022-11-02朱奕锟余联庆周嘉诚
朱奕锟,余联庆,周嘉诚,冯 娜
基于ABAQUS的桁架机器人模态分析
朱奕锟1,余联庆*1,周嘉诚2,冯 娜1
(1.武汉纺织大学 机械工程与自动化学院,湖北 武汉 430200;2.华中科技大学 机械科学与工程学院,湖北 武汉 430074)
为了确保桁架机器人在设计阶段满足模态性能要求,在设计前期需要对桁架机器人进行模态分析研究。本文首先根据物流工厂中的实际需求,确定桁架机器人的整体结构,并建立三维模型;然后基于ABAQUS有限元仿真平台提取桁架机器人的前十阶固有频率以及振型;最后通过模态试验方法对桁架机器人的实体缩小模型进行分析。结果表明:模态试验结果中存在四种振型与ABAQUS分析结果中的四种振型吻合程度较高,验证了仿真实验的可靠性。所做分析为避免发生共振及后续改进等研究提供理论支持。
桁架机器人;ABAQUS;模态仿真;模态试验
0 引言
随着“中国制造2025”的不断推广,鼓励制造企业进行物流智能化转型,推动物流、智能仓储等物流新技术、新设备的应用。在这个过程中,智能物流工厂必须坚持以智能产品为主体,智能生产为主线[1]。工业机器人是整个生产过程中的关键环节,能有效降低人工成本,提高生产效率。桁架机器人也叫直角坐标机器人,是工业机器人的一种。由于桁架机器人有着可承受重质量运输、刚度大、强度高、安全系数高等特点,使得它在物流工厂应用中的优势更加明显。当前,桁架机器人在智能制造中有着举足轻重的地位,它不仅大大降低了企业总成本中的劳动力投入成本,而且显著提高了制造业中的生产效率。桁架机器人主要以直线运动为主,由X,Y及Z方向分别提供3个独立的自由度,完成工作空间点的定位工作。桁架机器人作为智能物流工厂输送线中的重要组成部分,对整个系统起着至关重要的作用,必须保证桁架机器人正常工作情况下的运动精度及可靠性。因此,对桁架机器人进行模态分析的研究具有重要的意义。
国内外学者对结构的模态分析进行了大量研究。Wu[2]等通过晶片处理机器人的动力学模型,得出影响机器人低频振动的相关参数,并利用约束函数定义对机器人进行优化。Soo[3]通过有限元分析的相关程序对机器人受到外界激励时的瞬态响应进行了仿真分析,再通过实验证明其有限元分析模型的可靠性。薛锋伟[4]利用Adams/vibration插件对输送桁架机器人的振动模型进行了分析,得出了输送系统的振动响应特性。王帅[5]分析了高速铝锭堆垛机动力学模型的静态模态、谐波响应。并通过仿真结果为堆垛机的动态特性方面的优化提供了理论指导。刑玉明[6]通过LMS动态测试系统对码垛机器人进行分析得出其动态特性,并与有限元软件的仿真结果进行了相应的对比分析,验证了实验的可靠性。
实际工作中,桁架机器人产生的变形和振动将会直接影响其加工精度及稳定性,而采用传统的设计方法已越来越难以满足现代加工产品的高精度、高可靠性要求,因此,亟须寻求更精确、高效的现代设计方法来解决这一问题。利用现代设计方法可以在计算机环境下进行桁架机器人的建模、仿真等操作,快速地研发出高刚度、高可靠性的桁架机器人。本文基于ABAQUS平台对整体桁架机器人进行仿真分析,对桁架机器人进行模态分析,并为桁架机器人的进一步分析研究和结构优化提供理论指导。
1 桁架机器人结构介绍
本文研究的桁架机器人应用于某物流工厂自动化输送线中。它主要代替人工进行物料的输送,高速高精度,能有效提高物料的运输效率。物流工厂场地实况图如图1所示。其中,立柱间距6米,立柱大小500×500mm,除去立柱宽度,两个立柱间是距离是5.5米。由图1中现场实际测量可知,车间最低位置4.1米,所装配的桁架机器人必须避开该尺寸。因此,所设计的桁架机器人X轴横梁方型钢的尺寸为120×120×5000mm,Y轴横梁方型钢的尺寸为120×120×10000mm,Z轴竖梁方型钢的尺寸为120×120×3000mm,立柱方型钢的尺寸为150×150×3000mm。
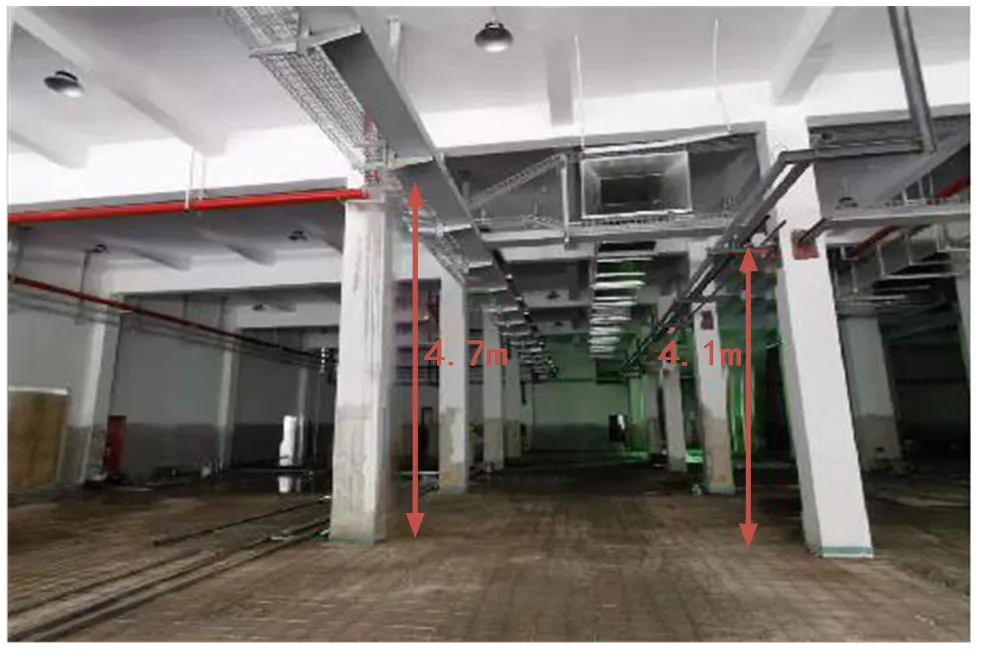
图1 场地实况图
由于桁架机器人主要由横梁、竖梁、立柱、末端执行器、滑台、传动系统以及伺服系统等几个部分组成,则利用SolidWorks软件建立的三维实体模型如图2所示。
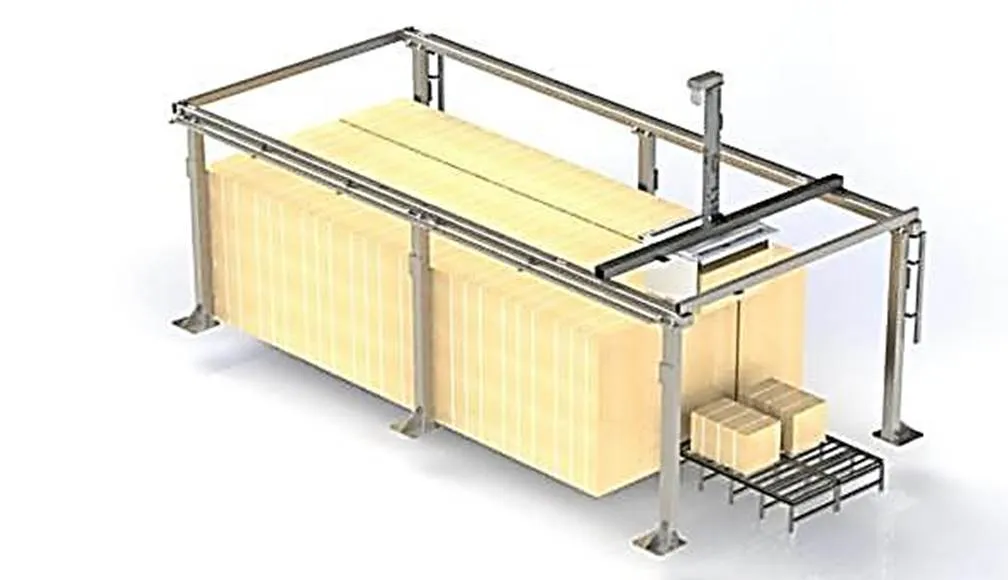
图2 桁架机器人三维实体模型
桁架机器人的各组成部件的材料属性如表1所示。
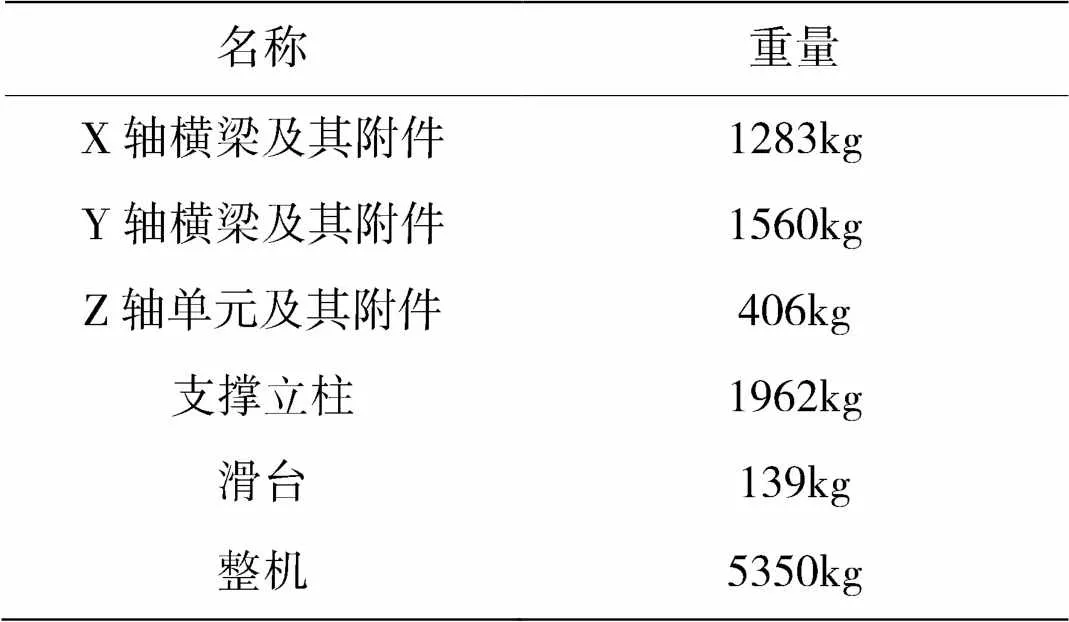
表1 桁架机器人参数
作为本文研究对象的桁架机器人可实现沿X、Y轴方向的水平直线运动和末端执行器沿Z轴竖直方向的直线运动。其各方向的运动由交流伺服电机通过减速机驱动齿轮与固定于X、Y向横梁上的齿条进行传动。
2 模态理论介绍
模态分析是动态特性分析的基础和核心。它通过模态变换矩阵把复杂结构中多自由度的振动一个个简化为单个的自由度振动。然后再利用线性叠加,对复杂结构的振动模态进行分析[7]。
根据机械振动理论,当一个机械系统按照其固有频率自由振动时,系统将具有与该频率相对应的某种振动形式,因此我们把描述振动形式的向量称为模态向量。它假定:(1)机械结构的结构刚度矩阵和质量矩阵是常数,恒定不变;(2)除非指定阻尼特性求解方法,否则不考虑阻尼效应;(3)机械结构中的载荷不随时间变化。
对任一确定的多自由度系统,其在物理坐标系下的运动微分方程可表示为:

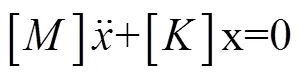
而在无阻尼自由振动时,系统中各个节点的振幅不一定全部为0,则此时系统的自频率方程可表示为:
模态分析被认为是研究振动特性的一种研究方法。其手段主要是利用模态分析得到的参数,即固有频率和模态振型,为结构的改进提供必要的理论依据。其中,振动的低阶振型对结构的振动影响较大,对结构的动态特性起决定作用。对于模态分析结果而言,阶数越低对系统的影响就越大,因此在模态分析时,一般求解前6~10阶即能满足精度要求。
3 桁架机器人模态仿真与试验
3.1 仿真模型建立及约束设置
由于桁架机器人是一个复杂的装配体,若直接将其进行网格划分和有限元分析,则会极大地影响网格划分质量和计算效率以及计算结果的准确性。因此,首先基于SolidWorks平台,将横梁、竖梁、滑台等部件上的螺纹孔、倒角等对整体机器人应力应变影响较小的细小结构进行简化。在完成几何模型的简化后,然后再导入到ABAQUS中,再根据不同部件的外部形状,选择合理网格划分方式,将节点对齐,进而各部件的网格拼接。最终,共生成单元10125个,节点18947个。然后根据桁架机器人的实际工况,在相互条件的模块选项中选择固定约束,并选中桁架机器人各个立柱地面,然后添加固定(Bonded)约束。然后在X、Y轴横梁、滑块与导轨之间也相互添加固定(Bonded)约束,模拟其各部件间的固定作用。最后,在载荷模块选项中选择重力选项,添加重力加速度。桁架机器人有限元仿真模型如图3所示。

图3 桁架机器人有限元仿真模型
3.2 模态试验器材及试验模型建立
由于实际模型体积较大,模态试验操作起来较为困难,因此本文按1:15做了一个缩小的桁架机器人模型进行现场的模态试验分析。模态试验系统如图4所示,主要由以下三个部分组成:激励系统、测量系统、数据采集及处理系统。
激励系统主要包括激振器系统、冲击力锤、步进激励设备等。激振器通常需要与信号发生器和功率放大器一起使用。冲击力锤是一种非固定激励系统,其不需要与试件连接,也不会影响机构的动态特性。本研究采用冲击力锤作为激励系统,如图4(a)所示。
测量系统负责采集被测物理量,然后将其转换为电信号,通过预放大和微积分变换将电信号转换为电压信号,以便使用分析仪器。本研究的测量系统由PCB加速度传感器和相关配套的电路组成。如图4(b)所示。
数据采集和处理系统通过LMS测试、记录和测量数据[9]。它包括记录脉冲信号和传感器的运动信号,同时处理数据,例如计算频率响应函数。本研究的数据采集和处理系统如图4(c)。
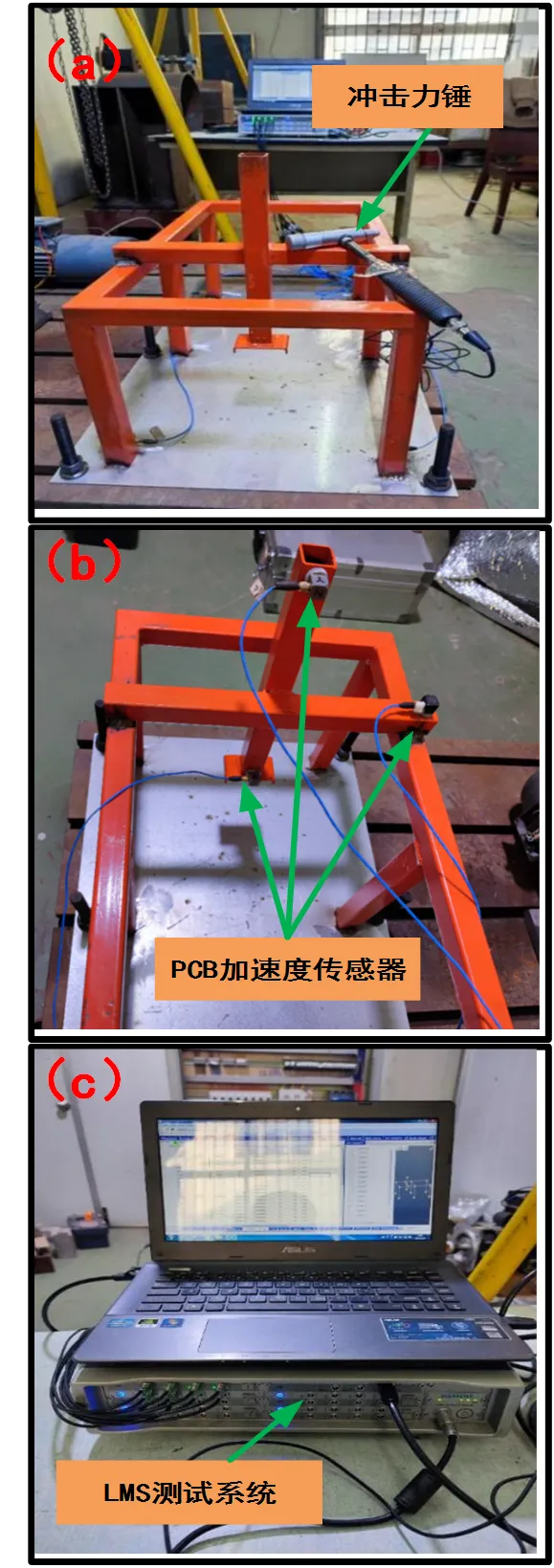
图4 模态试验系统
根据桁架机器人各个部件的尺寸,通过测点布置中尽可能不缺失结构、尽量简化的原则。测点布置如图5所示。图中黄色标示点即为测量点,一共17个测点,测点的编号分不同的部件按顺序进行布置。这样的布点基本能满足布点的原则,包括了反映低阶模态特性的重要点和反应整体动态特性的关键点。从而建立试验模型如图5所示。
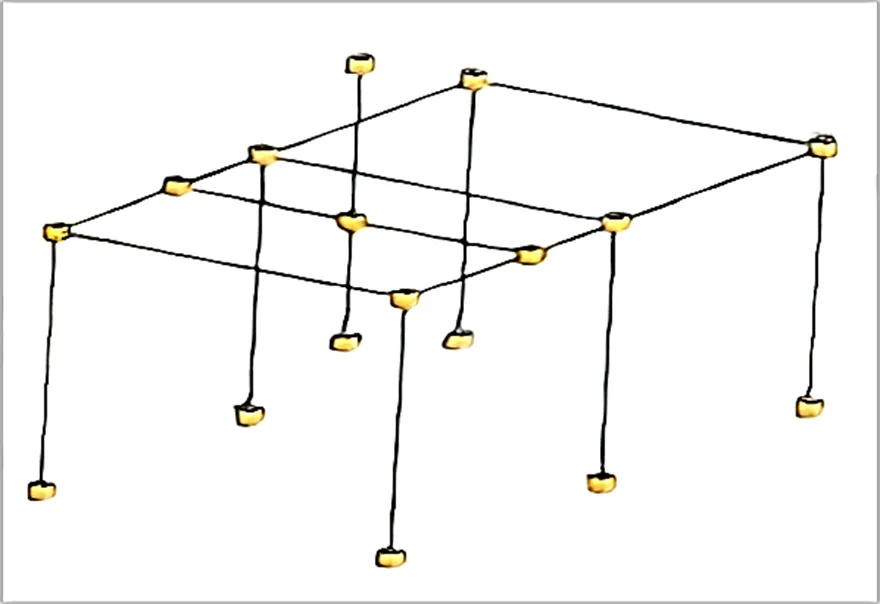
图5 桁架机器人试验模型
4 模态结果分析
由于固有频率是结构的固有特性,机器人无论运行到何种位置状态,其易受影响的频率范围都大致相同[8]。因此,本文将桁架机器人各方向上的移动轴设置在抓取物料的提升阶段,这样可以模拟桁架机器人在抓取工作中时受到的冲击影响。再根据前面进行仿真的相关设置在ABAQUS中进行线性摄动的分析步骤后提交作业,在有限元模型中进行后处理,得出桁架机器人的前十阶固有频率及振型[9]。固有频率如表2所示,振型云图如图6所示。
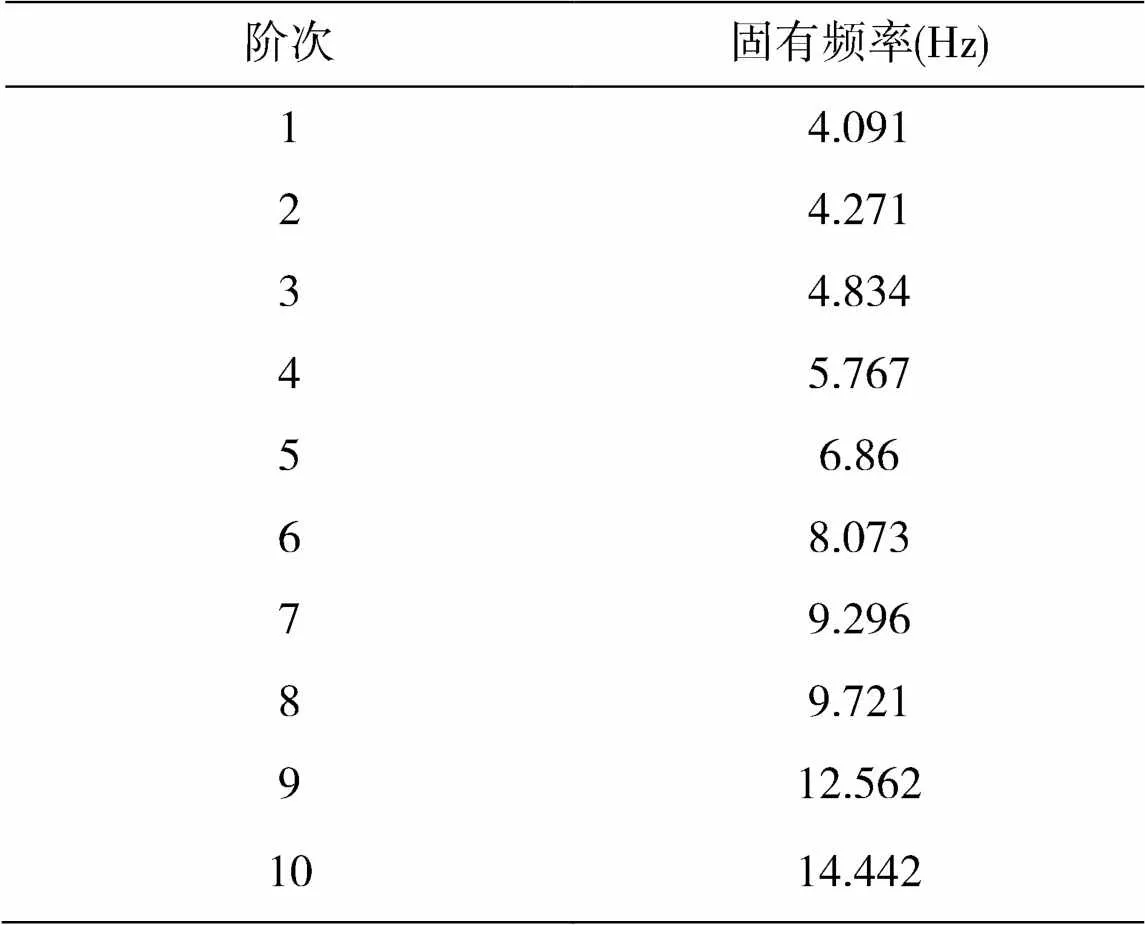
表2 桁架机器人前10阶固有频率
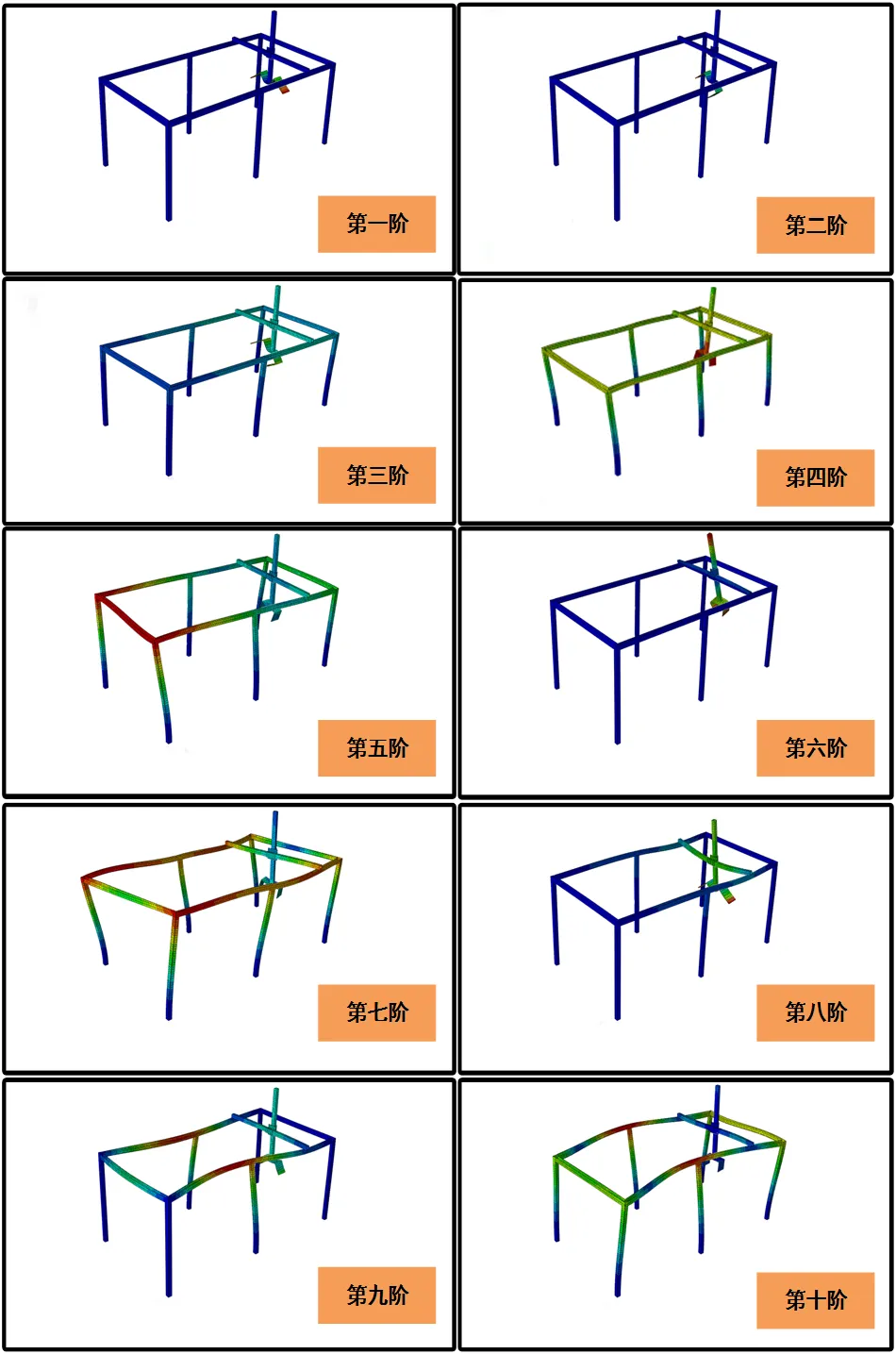
图6 桁架机器人前10阶振型云图
观察图6可知,在大多数固有频率作用下,桁架机器人的末端执行器振动都比较明显,而末端执行器正是桁架机器人在整个运输码垛工作过程中最为关键的部件。若是桁架机器人出现了共振的现象,末端执行器的变化会非常大。因此,在确保桁架机器人工作效率的前提下,可以通过控制桁架机器人驱动系统中的伺服电机的工作速度,使其激振频率远离桁架机器人的整体结构的固有频率,从而避免工作过程中发生共振现象,影响机器人的工作精度以及使用寿命。
图7是由LMS测试系统分析得出的试验模型部分阶数的振型动画,从图中观察可以看出其振型分别为:左侧两根立柱以及X轴横梁沿着Z轴正方向变形;桁架机器人整体框架朝X轴正方向变形;两根Y轴横梁朝整体结构中间变形;两根Y轴横梁朝Z轴正方向变形。与ABAQUS模态仿真结果的第5、7、9、10阶振型几乎相同,二者一致性较好,这说明了其桁架机器人建模与约束条件设置的准确性[9]。
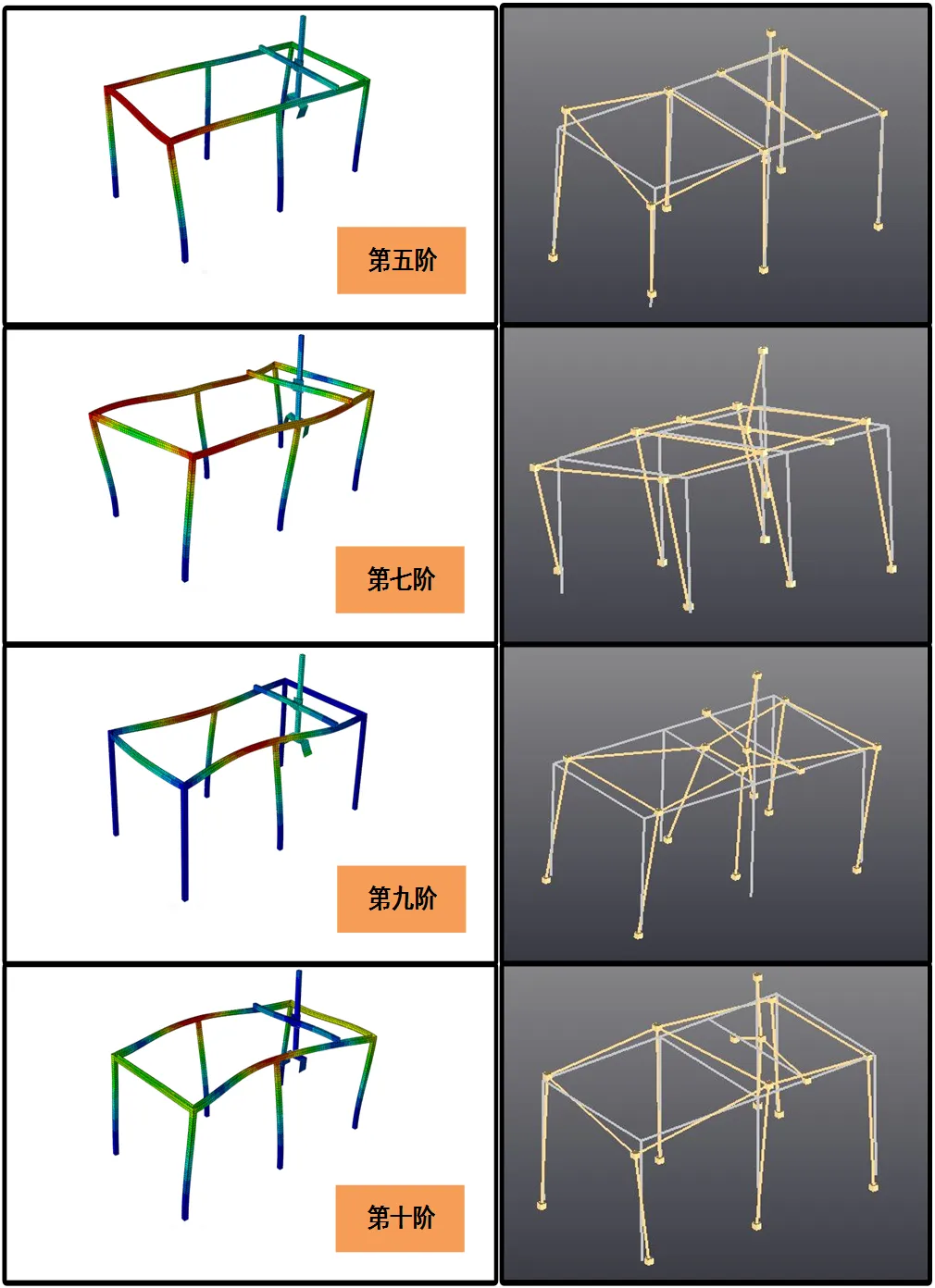
图7 桁架机器人部分模态仿真与试验振型
5 结论
本文以桁架机器人为研究对象,通过ABAQUS软件以及模态试验对桁架机器人进行模态分析,得出以下结论:
(1)通过ABAQUS有限元仿真,计算出桁架机器人的固有频率及其振型。在实际工作时应避免出现与之相近的工作频率,避免发生共振。
(2)根据模态试验分析,得出缩小模型中存在四种振型与ABAQUS仿真平台求解出的第五、七、九和十阶模态振型高度对应,二者一致性较好,验证了实验的可靠性。
(3)该桁架机器人的整体固有频率偏低,易发生共振现象,应继续进行结构优化,以提高其固有频率,优化其振动性能。
[1] 李媛. 国家审计推动制造业高质量发展的路径研究[J]. 商展经济, 2020, (04): 108-110.
[2] Ming Yue Wu, Yan Jie Liu, He Gao Cai. Dynamic Analysis and Optimization for Wafer Handling Robot[J]. Advanced Materials Research, 2014, 3043: 898-898.
[3] Koh Man Soo, Kwon Soon Ki, et al. A Study for the Dynamic Characteristics and Correlation with Test Result of Gantry Robot based on Finite Element Analysis[J]. Journal of Digital Convergence, 2015, 13(1).
[4] 薛锋伟. 两轴高速传料机械手动静态性能分析[D]. 扬州: 扬州大学, 2014.
[5] 王帅. 高速铝锭堆垛机机体的数学建模及动态性能分析[D]. 兰州: 兰州理工大学, 2009.
[6] 邢玉明. 码垛机器人的动态特性分析[D]. 天津: 天津大学, 2009.
[7] 王文刚, 王蒙, 周素霞, 等. 基于有限元技术的搅拌摩擦焊构架模态分析[J]. 机械制造, 2019, 57(02): 5-8.
[8] 廖能解, 马平, 李健洪, 等. 上下料桁架机器人仿真研究[J]. 机床与液压, 2019, 47(21): 9-14+33.
[9] 唐程光, 赵震, 阚洪贵. 基于铝合金减振器塔的白车身模态分析与研究[J]. 汽车实用技术, 2022, 47(02): 57-60.
[10] 邹平, 陈元卫. 某扭力梁模态仿真与模态试验对标研究[J]. 装备制造技术, 2021, (06): 60-63.
Modal Analysis of Truss Robot based on ABAQUS
ZHU Yi-kun1, YU Lian-qing1, ZHOU Jia-cheng2, FENG Na1
(1. School of Mechanical Engineering; Wuhan Textile University,Wuhan Hubei 430200, China;2. School of Mechanical Science and Engineering, Huazhong University of Science and Technology, Wuhan Hubei 430074, China)
In order to ensure that the truss robot meets the modal performance requirements in the design stage, it is necessary to conduct modal analysis on the truss robot in the early design stage. This paper firstly determines the overall structure of the truss robot and establishes the 3D model according to the actual requirements in the logistics factory. Then the first ten natural frequencies and modes of the truss robot are extracted based on ABAQUS finite element simulation platform.Finally, the model of truss robot is analyzed by modal test. The results show that the four vibration patterns existing in the modal test results are in good agreement with the four vibration patterns in the ABAQUS analysis results, which verifies the reliability of the simulation experiments. The analysis performed provides theoretical support for studies such as resonance avoidance and subsequent improvements.
truss robot; ABAQUS; modal simulation; modal test
余联庆(1972-),男,教授,博士,硕士生导师,研究方向:机器人机构学.
TD463
A
2095-414X(2022)05-0041-05
