输电线带电作业机械臂末端位姿误差补偿方法研究
2022-11-02张宏伟叶高呈邹德华
张宏伟,叶高呈,邹德华,江 维
输电线带电作业机械臂末端位姿误差补偿方法研究
张宏伟1,叶高呈1,邹德华2,江 维*1
(1.武汉纺织大学 机械工程与自动化学院,湖北 武汉 430200;2.智能带电作业技术及装备(机器人)湖南省重点实验室(国网湖南省电力有限公司超高压输电公司),湖南 长沙 420100)
输电线路带电作业机械臂辅助并代替人工进行线路检修作业与维护,具有广阔的应用前景。但自身与外部扰动等多重因素会使得机械臂末端位姿存在一定偏差,直接影响作业对象定位精度,为了提升机械臂末端在作业过程中的位姿精度,并使得机械臂能够自适应补偿扰动带来的影响,本文首先建立了机械臂作业过程的运动学模型,基于该运动学模型建立了机械臂关节连杆参数和关节转角存在摄动时的末端位姿误差数学模型,在上述基础上提出了一种机器人机械臂末端位姿误差补偿方法,并通过仿真实验验证了误差模型和补偿方法的有效性。最后,在带电线路上,以机械臂实现输电线路引流板螺栓紧固为例进行了检修作业,试验验证了本文所提出的机械臂末端位姿误差补偿方法的工程实用性,本文的研究对于输电线路智能运维管理具有重要理论意义和实际应用价值。
输电线路;机器人;机械臂;位姿误差;补偿方法
0 引言
输电线路带电作业机器人[1-4]辅助甚至替代人工进行输电线路检修维护作业,对于提高作业效率,减轻人员劳动强度,降低作业安全和风险具有重要作用和较好的应用前景。输电线路结构复杂,线路金具众多,每一个部件的故障都会影响输电线路的安全稳定运行,最常见的检修作业有绝缘子串更换[5-6],防震锤更换[7-8],间隔棒更换[9-10],引流板紧固[11-12]等,通过分析各类输电线路检修作业,其具有一个共同的特点就是作业过程都是通过机械臂搭载作业末端通过各关节的协同运动逐渐接近、定位直至捕捉到作业对象,特别是作业对象中的具有代表性的连接件,比如防震锤、间隔棒、引流板上的螺栓和绝缘子串中的W销和R销等,在末端捕捉作业对象过程中有两大类因素会造成末端在空间坐标系中的位姿产生偏差,其一,系统误差[13-15],该误差是在机器人系统理论设计与实际机器人系统组装中产生的连杆参数和关节转角偏差,这种客观存在的偏差一般可以通过人工经验尽可能地消除,其二,随机误差[16-18]该误差是机械臂作业过程中外部随机干扰因素造成的机械臂末端位姿产生的偏差,如风载荷造成的机械臂和末端的摇摆等随机因素也会造成末端在空间中的位姿坐标发生误差,末端空间位姿误差直接影响末端对于作业对象的定位[19-20],特别是螺栓等连接件,其对于末端定位要求较高,微小的位姿偏差会造成末端套筒与螺栓之间无法精准对接,甚至可能造成作业失败。基于上述分析,尽可能地减小系统误差和尽可能地适应外部环境产生的随机误差,实现机械臂末端位姿的自补偿是解决机械臂末端位姿精准性和作业对象定位捕捉技术的关键瓶颈问题。
综上所述,本文提出了一种输电线路带电作业机械臂的末端位姿补偿方法,首先,通过对作业过程的分析,建立作业机械臂的运动学模型,推导出机械臂末端位姿相对于各关节结构参数和运动参数的理论模型,然后引入扰动因素并结合已有的运动学模型,推导出随机扰动作用下末端位姿误差模型,基于该模型提出机械臂的末端位姿补偿方法,并通过相关运动学计算和仿真验证位姿补偿算法的有效性,最后,以实际带电线路上的引流板螺栓紧固作业为例通过风载荷产生随机末端位姿误差,机器人机械臂及其末端带电现场作业环境下实现引流板的拧紧作业,从而验证本文所提出方法的工程实用性。本文的研究对于增强机械臂对野外复杂环境的自适应性及输电线路安全、稳定、智能运维管理具有重要理论意义和实际应用价值。
1 机械臂机构构型与运动学建模
1.1 机械臂机构构型
以输电线路螺栓紧固作业检修机器人的作业臂为研究对象进行单独分析末端套筒位姿与关节连杆的参数关系,其作业臂包括底部基座、伸缩臂一、旋转关节、伸缩臂二、拧螺栓机构和摄像探头共六个部分。底部基座安装在机器人机体上,支撑整个机械臂的作业动作,伸缩臂一与底座相连,可让机械臂整体上升使其末端拧螺栓机构处于螺栓的上方。旋转关节位于伸缩臂一和伸缩臂二的中间,可绕其中心旋转,使其末端对应其作业位置。伸缩臂二处于最上方,其一端有末端拧螺栓机构。其机械结构示意图如图1所示。
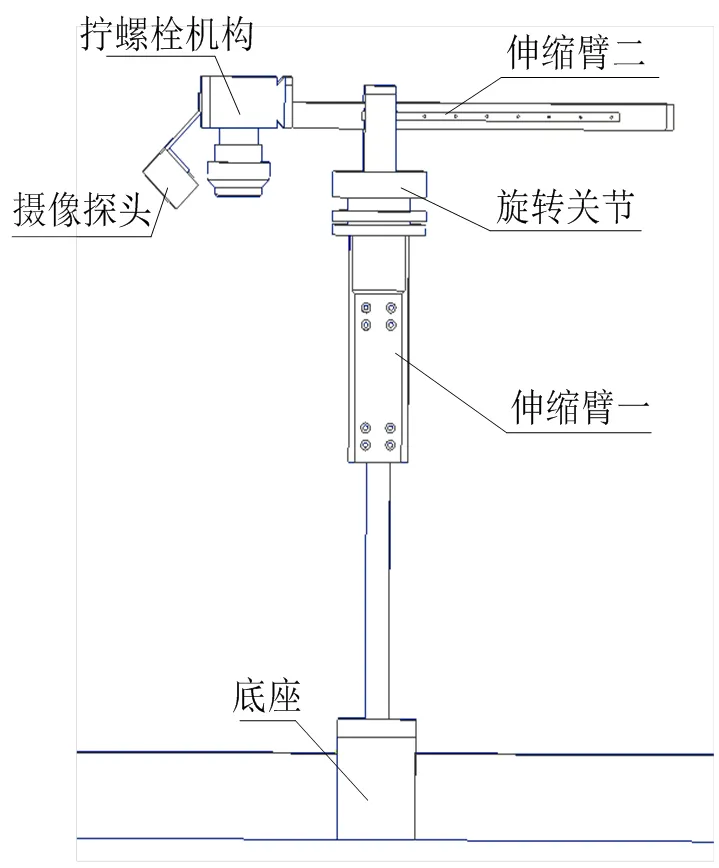
图1 机械臂结构示意图
1.2 机械臂运动学建模
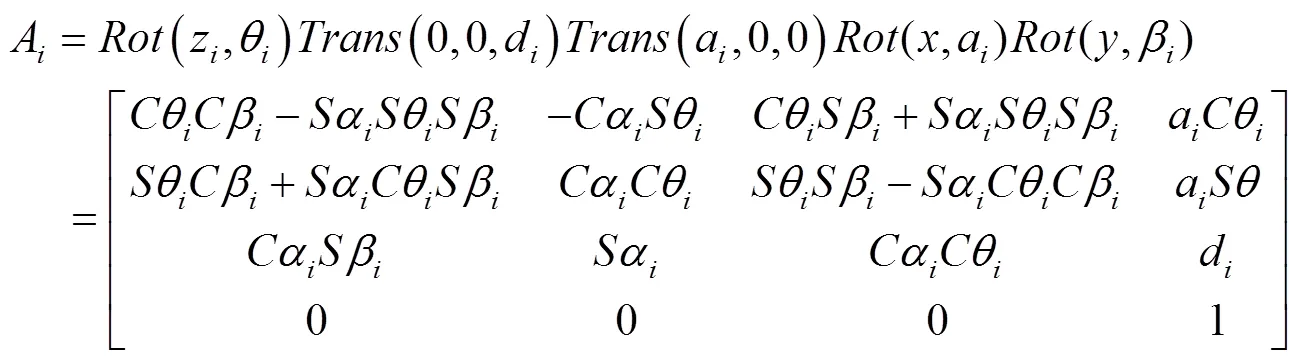
利用D-H模型法是当前应用最为广泛的运动学建模方法,其基本原理是首先根据连杆参数和关节转角确定各关节之间的齐次变换矩阵,然后通过齐次变换矩阵的叠乘得到机械臂末端空间位姿与各关节参数之间的数学关系。由前述分析可知该机械臂共有三个自由度,其中包括两个伸缩关节和一个旋转关节。运用D-H表示法,首先要为每个关节指定一个坐标系,即为每个关节指定一个z轴和一个x轴,一般不用特定y轴,其中z轴为每个旋转关节按右手法则旋转的方向和每个伸缩关节沿直线运动的方向。而xi轴则为zi-1和zi轴之间的公垂线。由上述方法建立该机械臂的D-H模型如图2所示。依据图2所示的D-H模型可将该机械臂的连杆基本参数表示为表1。
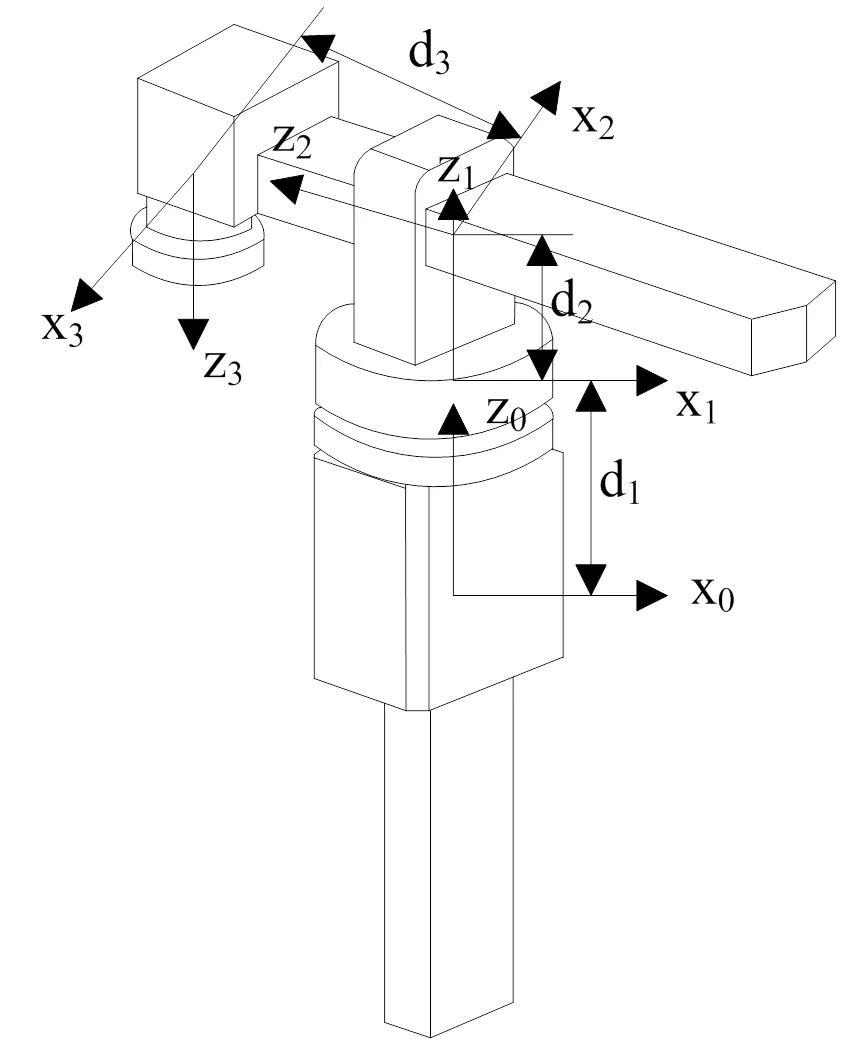
图2 机械臂的运动学模型
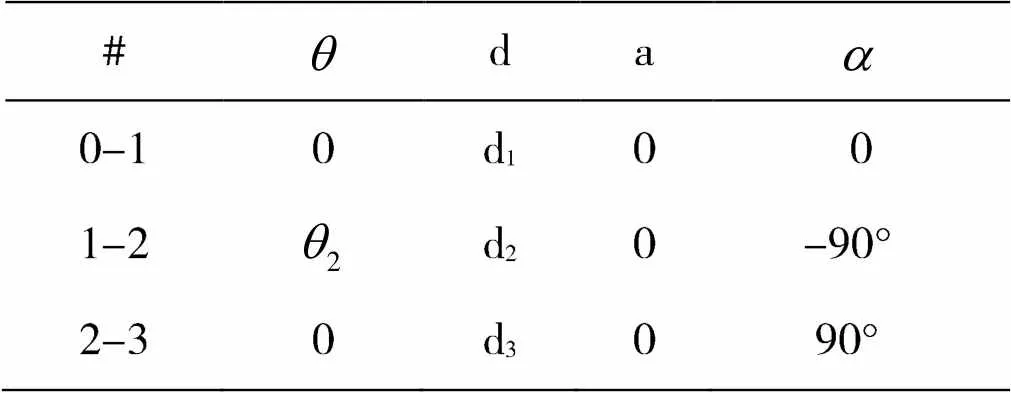
表1 机械臂的连杆参数
将机械臂正运动学方程联立,得到机械臂基座(0坐标系所在位置)和末端之间总变换为式(2)。
机械臂的运动学模型的研究最关键的是运动学逆解,正是有了运动学逆解才能确定各个关节的坐标参数从而使机器人达到期望位姿,将式(2)的期望位姿表示为式(3)。

将式(2)和式(4)联立并化简求得式(5)。

将式(6)简化为分式可得为机械臂位姿逆解如式(7)所示。
2 机械臂末端位姿误差建模
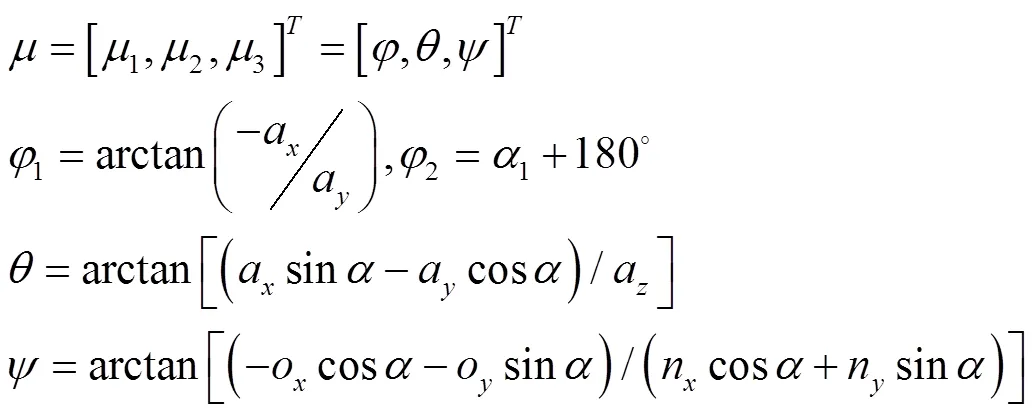
机器人末端执行器的位姿误差可由生产加工安装偏差和齿轮传动损坏偏差等多重因素共同决定。而利用D-H法建立的机械臂运动学模型其轴线互相平行的相邻关节坐标系确定的参考点为零。实际生产制造的机械臂中存在着微小偏差,而这种微小偏差的影响对实际作业过程是巨大的。机械臂位姿误差分析是以所建立的运动学模型为基础,通过图2对机械臂所建立的D-H坐标系,为便于机器人位姿误差的计算,现将机械臂的位置和姿态用向量X来表示,如式(8)所示:


而机械臂末端姿态误差可表示为式(11):

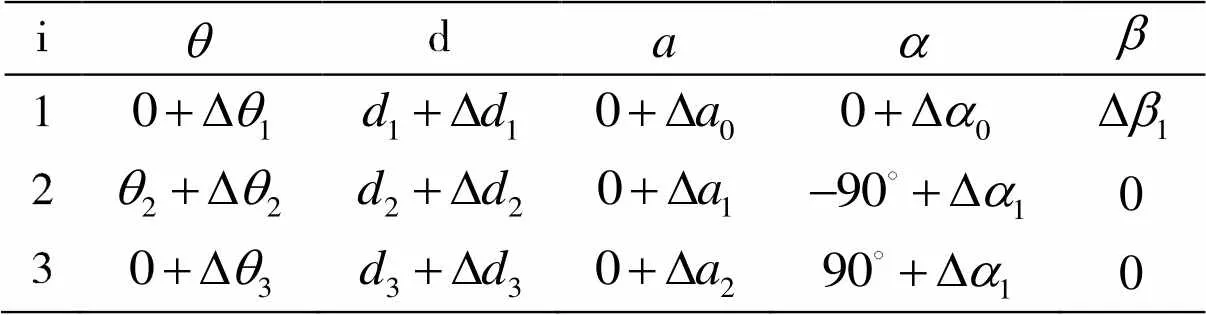
表2 误差参数下的机械臂连杆参数

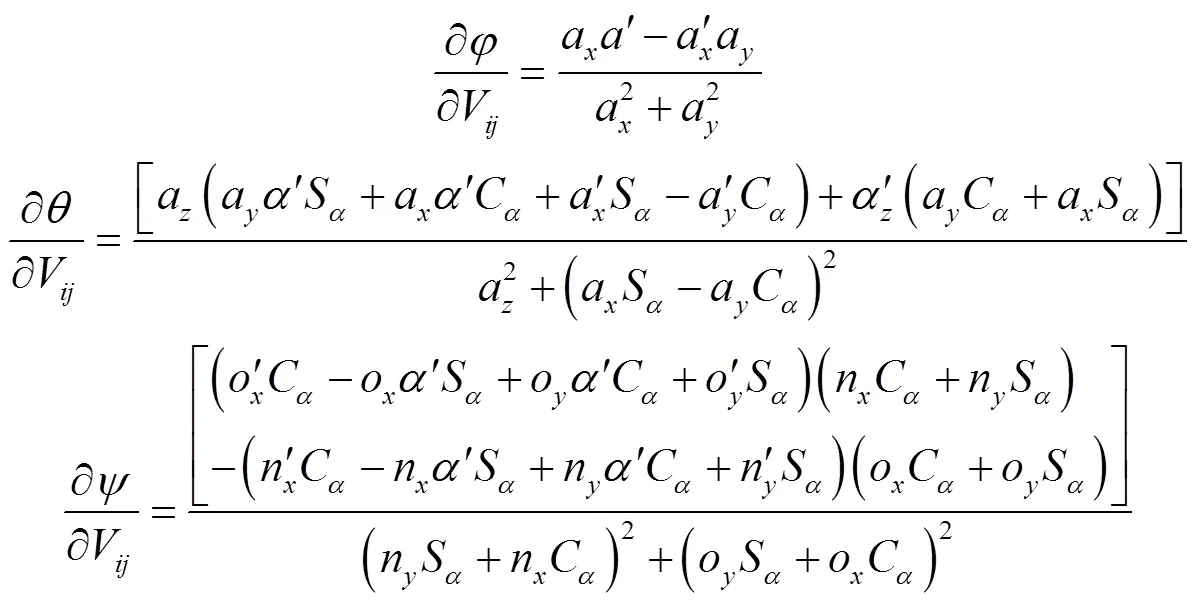
其中各参数计算形式如式(15)所示。

3 机械臂末端位姿误差补偿方法
3.1 误差摄动补偿法的基本理论

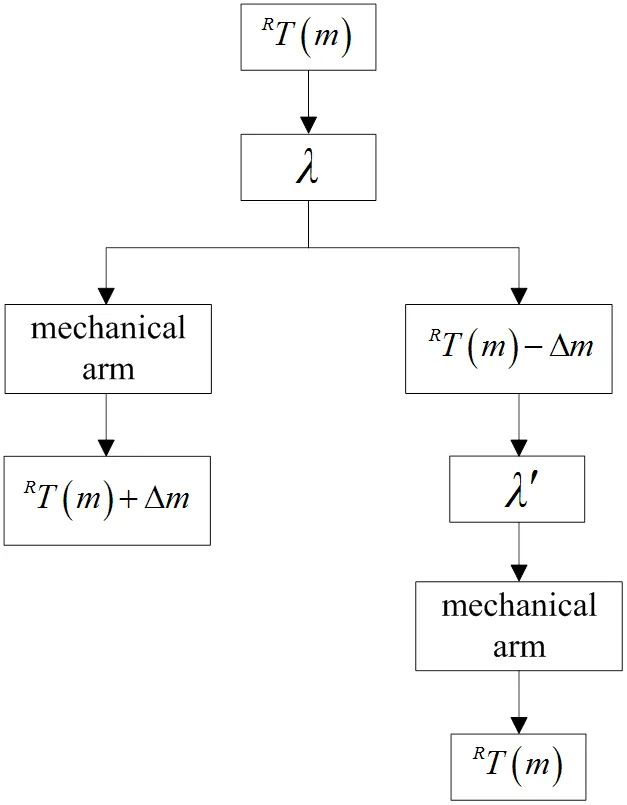
图3 误差摄动补偿法原理图
3.2 末端位姿误差补偿的过程

4 末端位姿误差补偿的仿真实验


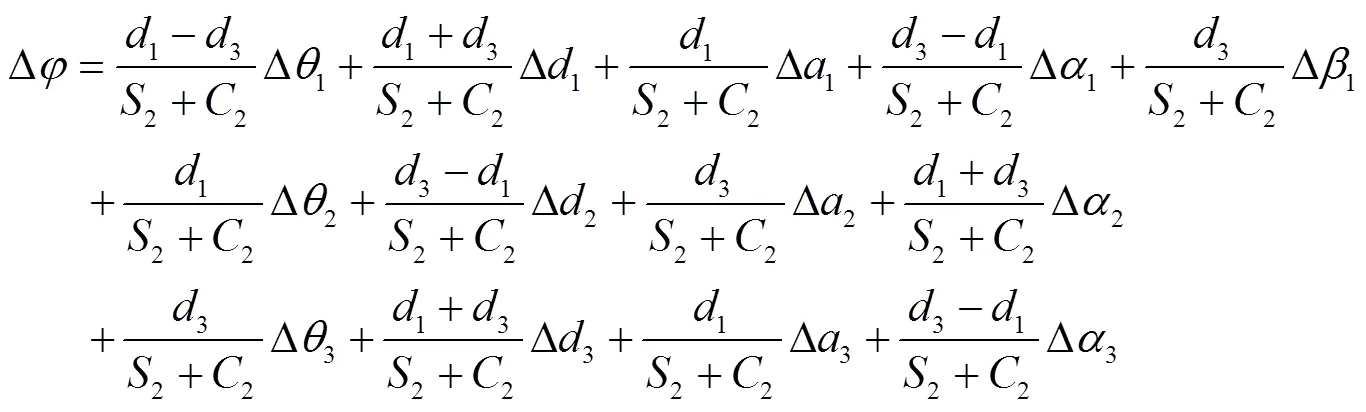
结合表2的机械臂连杆误差参数,可求得在四个关节变量的输入下,机械臂的位姿误差如式(21)所示:



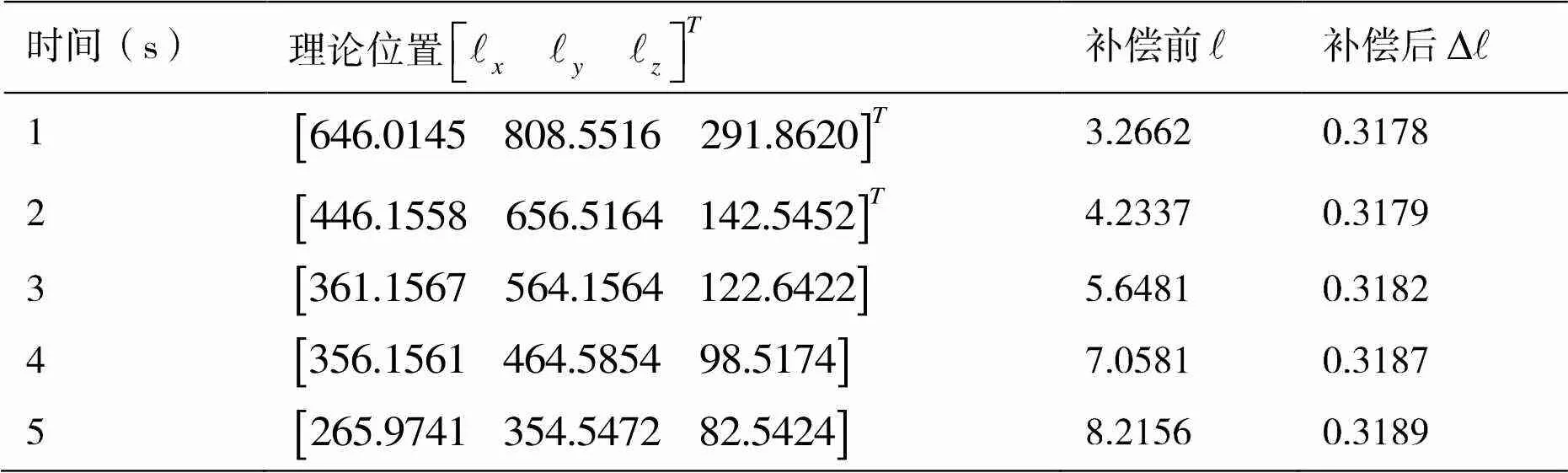
表3 机械臂末端补偿前后数据
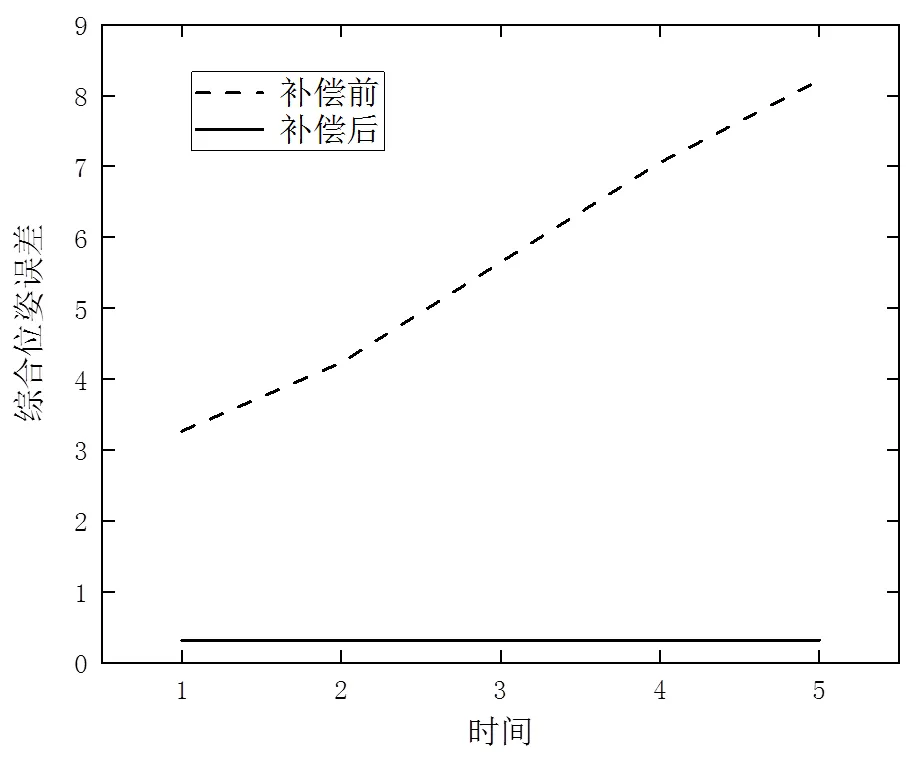
图4 机械臂末端位姿误差补偿前后对比
由图4仿真结果可以看出,机械臂末端补偿前最小位姿误差约为3mm,最大误差约为8mm,而经过该误差摄动补偿方法后,该机械臂末端的位姿误差约为0.3mm,相比之前的误差最大缩小了10%,验证了本文所提出的机械臂位姿误差补偿方法的有效性,大幅提高机械臂末端的定位精度,证明了该误差摄动补偿方法的可行性。
5 输电线路机械臂螺栓紧固现场作业试验
为验证机械臂末端位姿误差补偿方法的工程实用性,选取实际带电线路环境下的单导线引流板螺栓紧固为应用对象。在国网湖南省带电作业中心的培训线路上进行机械臂末端位姿补偿和引流板螺栓的对准捕捉与定位。输电线路杆塔塔型为SDN31-18,输电导线型号为LGB20A-95/55,机器人上线后在实际带电作业环境下受到野外随机风载荷的干扰,机械臂末端发生了一定的偏转,产生了一定的位姿误差,但是通过机器人软件系统自主调用末端位姿误差自补偿线程,机器人末端能够自主补偿误差达到自我纠偏,在野外复杂环境下机器人末端套筒能够克服位姿误差自主实现螺栓头的捕捉与对接,较好的完成了输电线路引流板螺栓紧固作业任务,其末端套筒实现螺栓的对准对接过程作业现场和作业过程如图5所示。
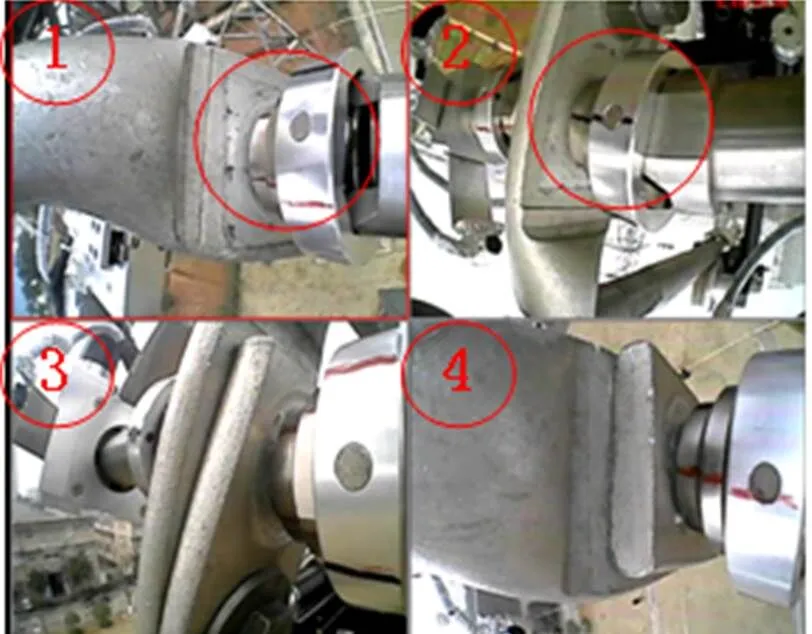
图5 引流板螺栓紧固作业现场试验图
6 结论
(1)本文基于机械臂运动学模型研究了关节转角存在摄动时的末端位姿误差数学模型,提出了一种机器人机械臂末端位姿误差补偿方法,并通过仿真实验,通过该方法姿态误差补偿后,机械臂末端综合误差减少了10%,验证了本文提出的误差模型和补偿方法的有效性。
(2)本文在输电线路上进行了引流板螺栓紧固作业试验,试验结果表明,本文提出的机械臂末端位姿误差补偿方法能够适用于在野外风载荷下的机械臂末端自主实现螺栓头的捕捉与对接任务。本文的研究对于输电线路智能运维管理具有重要理论意义和实际应用价值。
[1] Alhassan A B, Zhang X, Shen H, et al. Power transmission line inspection robots: A review, trends and challenges for future research[J]. International Journal of Electrical Power & Energy Systems, 2020, 118: 105862.
[2] Seok K H, Kim Y S. A state of the art of power transmission line maintenance robots [J]. Journal of Electrical Engineering & Technology, 2016, 11(5): 1412-1422.
[3] Pouliot N, Richard P L, Montambault S. LineScout technology opens the way to robotic inspection and maintenance of high-voltage power lines [J]. IEEE Power & Energy Technology Systems Journal, 2015, 2(1):1-11.
[4] Yue X, Wang H, Jiang Y. A Novel 110 kV power line inspection robot and its climbing ability analysis[J]. International Journal of Advanced Robotic Systems, 2017, 14(3): 1-10.
[5] 刘存根, 鲁守银, 孙丽萍, 等. 高压带电作业机械臂姿态监测系统研究 [J]. 高电压技术, 2015, 41(3):931 -936.
[6] 王耀南, 魏书宁, 印峰, 等. 输电线路除冰机器人关键技术综述 [J]. 机械工程学报, 2011, 47(23):30-38.
[7] Ye X, Wu G, Fan F, et al. Overhead ground wire detection by fusion global and local features and supervised learning method for a cable inspection robot[J]. Sensor Review, 2018, 38(3): 376-386.
[8] Yan Y, Jiang W, et al. Research on configuration design and operation effect evaluation for ultra-high voltage (UHV) vertical insulator cleaning robot[J]. Industrial Robot An International Journal, 2020, 47(1):90-101.
[9] 魏永乐, 房立金. 双臂巡检机器人沿输电线路行走特性分析[J]. 北京理工大学报,2019, (8): 813-818.
[10] Jalal M F A, Sahari K S M, Fei HM, et al. Design and development of three arms transmission line inspection robot[J]. Journal of Robotics, Networking and Artificial Life, 2018, 5(3): 157-160.
[11] 江维, 吴功平, 樊飞, 等. 高压线路四臂移动作业机器人BP网络联动控制[J]. 东北大学学报(自然科学版), 2016, 37(11):1530-1535.
[12] 肖时雨, 王洪光, 刘国伟. 一种新型四臂巡检机器人机构设计与运动分析 [J]. 西北工业大学学报, 2018, 36(3):432-438.
[13] Kalani H, Malayjerdi M, Dehnavi M H. H2M robot: a new prototype robot for insulation of high voltage transmission[J]. International Journal of Intelligent Robotics and Applications, 2019, 3(1): 87-98.
[14] Dai J S, Jones J R. Matrix representation of topological changes in metamorphic mechanisms [J]. Journal of Mechanical Design, 2005, 127(4):837-840.
[15] Lan Z H, Du R. Representation of topological changes in metamorphic mechanisms with matrices of the same dimension[J]. Journal of Mechanical Design, 2008, 130(7):1029-1033.
[16] Haitao W, Biwu Y, Ziheng P, et al. Optimal design and stress analysis of the transmission line inspection robot along the ground line[J]. The Journal of Engineering, 2019, 20(16): 3088-3091.
[17] 李树军, 王洪光, 李小彭, 等. 面向作业任务的约束变胞机构设计方法[J]. 机械工程学报, 2018, 54(3): 26-35.
[18] 王斐, 齐欢, 周星群, 等. 基于多源信息融合的协作机器人演示编程及优化方法[J]. 机器人, 2018, (4): 551-559.
[19] 樊绍胜, 杨迪, 邹德华, 等. 输电线路螺栓紧固带电作业机器人的视觉搜索, 识别与定位方法[J]. 电子测量与仪器学报, 2017, 31(9): 1514-1523.
[20] Wang W, Wu G, Bai Y, et al. Hand-Eye-Vision based control for an inspection robot’s autonomous line grasping [J]. Journal of Central South University, 2014, 21(6): 2216-2227.
Research on the Compensation Method of the End Posture Error for Live Working Manipulator on Transmission Line
ZHANG Hong-wei1, YE Gao-cheng, ZOU De-hua2, JIANG Wei1
(1. School of Mechanical Engineering and Automation, Wuhan Textile University, Wuhan Hubei 430200, China;2. State Grid Hunan EHV Transmission Company, Changsha Hunan 420100, China)
Power transmission line live-work robot arm assists and replaces manual line inspection and maintenance. It has broad application prospects. However, multiple factors such as the robot arm itself and external disturbance will make the robot arm end position deviation, which directly affects the positioning accuracy of the work object, to improve the position accuracy of the robot arm end in the operation process and make the robot arm can adapt and compensate the impact of disturbance. In this paper, the kinematics model of the manipulator's work process is first established, based on the motion a mathematical model of the end posture error of the robot arm’s joint link parameters and joint angle perturbation is established based on the scientific model. Based on the above, a method for compensating the end posture error of the robot manipulator is proposed, and the error is verified by simulation experiments. The effectiveness of the model and the compensation method. Finally, on the line with wires, the robot arm is used to realize the bolt fastening of the transmission line guide plate as an example. The test verifies the engineering of the robot arm end posture error compensation method proposed in this paper. Practicability, the research in this paper has important theoretical significance and practical application value for the intelligent operation and maintenance management of transmission lines.
power transmission line; robot; manipulator; posture error; compensation method
江维(1983-),男,博士研究生,研究方向:电力机器人.
智能带电作业技术及装备(机器人)湖南省重点实验室2021年开放基金(NO:2021KZD2001).
TP241
A
2095-414X(2022)05-0051-07