一种石油生产多分相检测新型光纤传感器
2022-09-21陈基亮孔德明孔德瀚刘国权孔令富
陈基亮,孔德明,郝 虎,孔德瀚,刘国权,孔令富
(1.燕山大学信息科学与工程学院,河北 秦皇岛 066004;2.燕山大学 电气工程学院,河北 秦皇岛 066004;3.河北环境工程学院 信息工程系,河北 秦皇岛 066000;4.中国石油集团测井有限公司 生产测井中心,陕西 西安 710077)
1 引 言
在石油生产井多相流体上升过程中,随着流体压力逐渐减小,气体随之析出,致使管道内流型、流态多变。而对此开展多分相测量可及时了解和掌握各产层渗出液状况,对调整油井生产方案、提高产能具有重要意义[1,2]。侵入式光纤探针技术[3,4]具有易于安装、体积小、抗干扰能力强、可直接定位于流体内,能准确监测该测量点的局部流体特征等优点,已引起越来越多石油生产领域学者和研究人员的高度重视。刘磊等利用光纤探针法成功测量了管道内气液两相流平均截面含气率[5,6]。张勇,李英伟等研制了一种用于持气率测量的锥形光纤探针传感器[7,8]。Cartellier等使用光纤探针法同时测量了气液两相流中气泡弦长、速度和局部浓度[9]。目前用于含气率测量的光纤探针传感器[10]已被广泛用于油气井储层参数测量中,但鲜见基于单敏感探头的石油生产多分相检测研究。
本文研制了一种适用于石油生产多分相检测的新型双接收端光纤传感器(new dual-receiving fiber optic sensor,NDR-FOP),并对锥形敏感头中的光传输轨迹、不同介质中的光传输过程、双接收环形耦合光路(double receiving ring coupled optical path,DR-RCOP)响应特性等问题开展了深入研究。
2 NDR-FOP工作原理及敏感头光传输轨迹研究
2.1 NDR-FOP工作原理
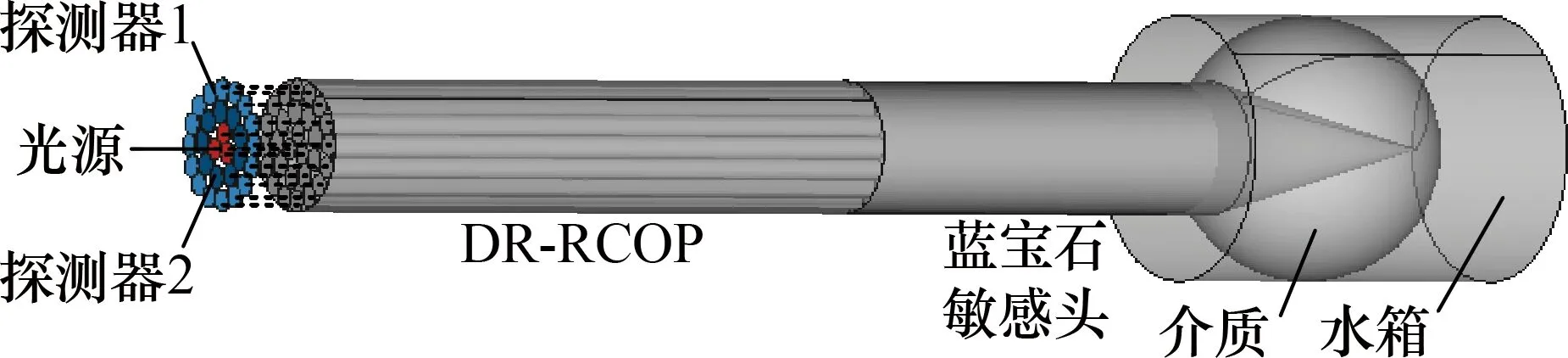
图1为NDR-FOP工作原理示意图。NDR-FOP主要由蓝宝石敏感头、耦合套管、保护套管、DR-RCOP、发光二极管、光电晶体管1、光电晶体管2、光电转换电路等组成,如图1(a)所示。其中DR-RCOP一端连接蓝宝石敏感头,另一端分别与发光二极管、光电晶体管1及光电晶体管2连接。

图1 NDR-FOP工作原理示意图Fig.1 Schematic diagram of the working principle of NDR-FOP
如图1(b)所示。光电转换电路包括光发射模块、光接收模块1及光接收模块2。光发射模块包括发光二极管与限流电阻R1,发光二极管的阳极连接电源线,阴极连接地线,发光二极管的发光面与DR-RCOP的3根光纤连接。
光接收模块1包括光电晶体管1和采样电阻R2,光接收模块2包括光电晶体管2和采样电阻R3,光电晶体管1与光电晶体管2的集电极均连接到发光二极管的阳极。光电晶体管1的发射极连接到信号线1上,光电晶体管1的受光面连接到DR-RCOP的9根光纤上。光电晶体管2的发射极连接到信号线2上,光电晶体管2的受光面连接到DR-RCOP的15根光纤上。光电晶体管1与光电晶体管2接收DR-RCOP返回的光线并将光信号转化为电信号。
2.2 探针敏感头光传输轨迹数学描述
本文以王炎[11]研究成果为基础,对锥角为30°的蓝宝石锥形光纤敏感头开展深入研究。由于多模光纤纤芯直径远大于光波长,故可采用几何光学[12]来模拟敏感头内部光线传输轨迹。敏感头结构及光传输轨迹如图2所示。

图2 敏感头结构及光传输轨迹示意图Fig.2 Schematic diagram of sensitive head structure and light transmission track
由图2可知,锥形敏感头包括柱形传光区域Cta和锥形感应区域Cia。建立空间坐标系,坐标原点O与锥形敏感头顶点重合,坐标系z轴与敏感头中心轴线重合,y轴和z轴均位于敏感头中心轴线所在的剖面上,x轴垂直于纸面向外。任取一条由光源S出射的光线,如光线s1,0。设光线s1,n的方向矢量为s1,n,T1,n为光线s1,n与敏感头表面的交点,n1,n为光线s1,n与敏感头表面交点T1,n处的单位外法矢量,其中n、k为正整数,n∈[1,k]。
光线s1,1是由光线s1,0经由底面折射进入锥形敏感头柱形传光区域内部的光线,光线s1,1的方向矢量s1,1可由折射定律[13]得到:
(1)
式中:θi为光线s1,0的入射角;θr为光线s1,0的折射角;η为相对折射率。

x2+y2=[l× tanω]2
(2)
式中:l为锥形感应区域的长度;ω为锥形敏感头的半锥角。
光线s1,n的参数方程可表示为:
(3)
式中:(x1,n-1,y1,n-1,z1,n-1)为T1,n-1点坐标,(x1,n,y1,n,z1,n)为T1,n点坐标,括号内(L1,n,M1,n,P1,n)为光线s1,n的方向余弦。
光线s1,n的方向矢量可由反射定律[14]得到:
s1,n=s1,n-1-2×(n1,n-1×s1,n-1)×n1,n-1
(4)
当光线s1,1~s1,i在柱形传光区域传输时,满足式(2)~式(4)所示的传输约束条件。本文仅分析在锥形感应区域表面发生全反射的光线,如s1,i+1~s1,j+2。其中j∈[i,k],j为正整数。此时,锥形感应区域Cia的表面方程[15]可表示为:
x2+y2=z2× tan2ω
(5)
锥形感应区域内部光线s1,i+1~s1,j+2应满足式(3)、式(4)与式(5)所示的传输约束条件。光线s1,j+3~s1,k表示在柱形传光区域内部反向传输的光线,最终光线s1,k与锥形敏感头柱形传光区域底面交于点T1,k。
2.3 光传输过程的仿真研究
由图2所示,假设光源S出射光线偏移角度α范围为(0°,40°),光源S坐标为(xS,yS,zS),以光源出射光线s1,0为例,光线s1,0与柱形传光区域底面交于点T0,T0点坐标为(x0,y0,L+l),其满足约束条件(x0-xS)2+(y0-yS)=[(zS-L+l)× tanα]2。则出射光线s1,0方向矢量可表示为:

(6)
更详细的光线s1,0在锥形敏感头内的光传输过程参照第2.2节。基于锥形敏感头内光线传输轨迹分析结果,光源出射光线sm,0在锥形敏感头内的传输过程Matlab仿真伪代码为:
输出:敏感头底面返回光线(交点)数据,Endpoint。
Begin
1.ω←0;R←0.3;L←8;l←1.12;S←(0.2,0.1,9.6);nc←1.56;n1←1.76;ns←1.54;n2←no或nw或ng;no←1.55;ng←1.00;nw←1.33;Endpoint;
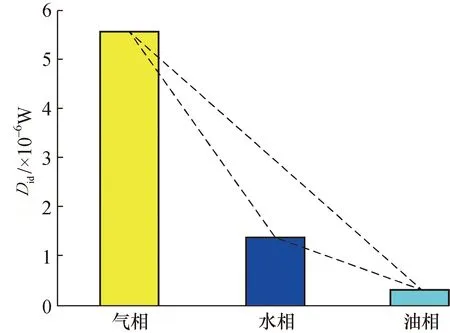
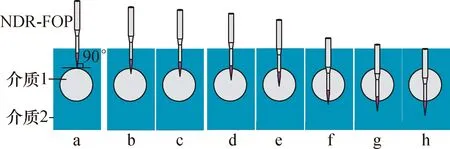
2.fori←0 to length(D)
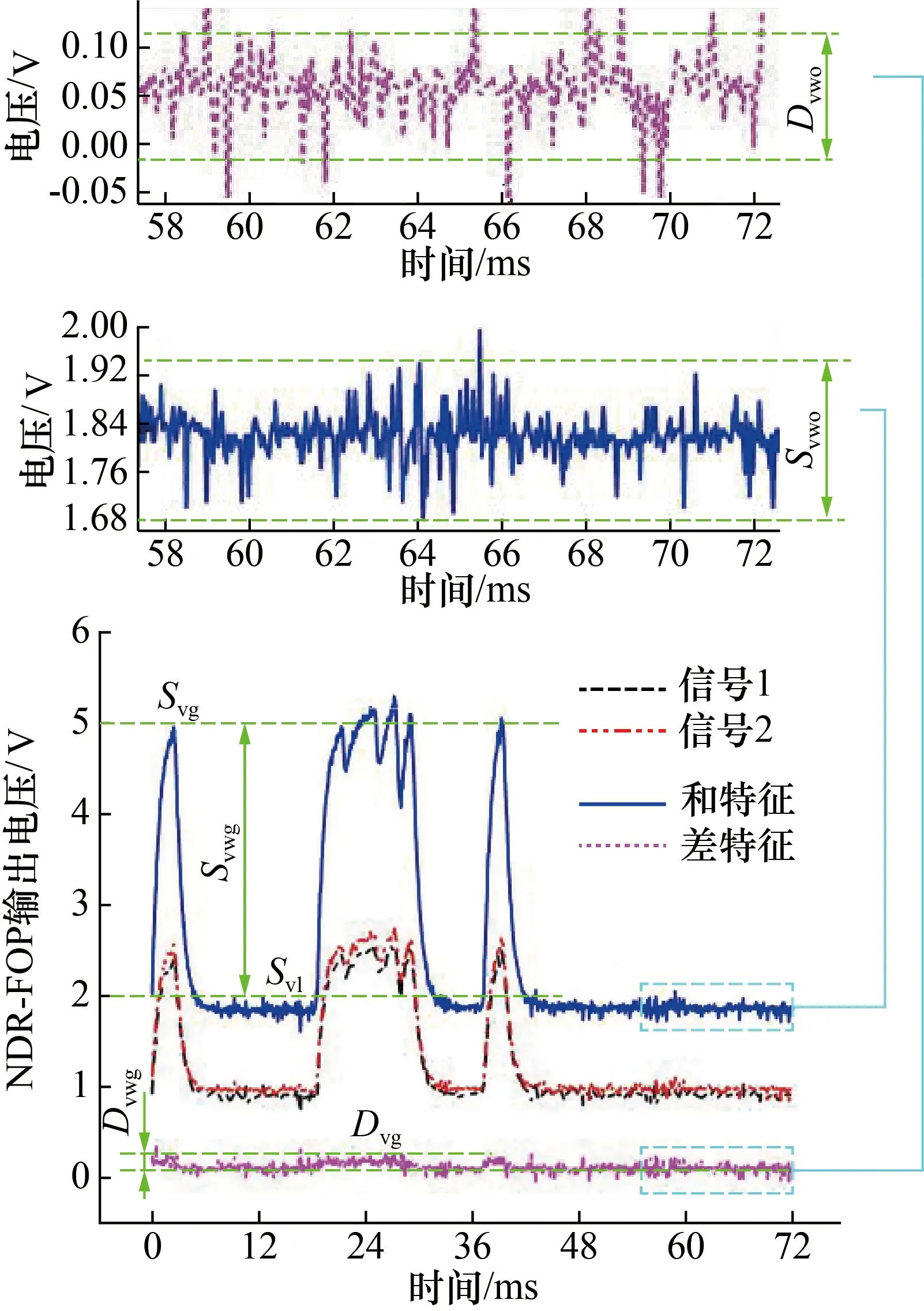
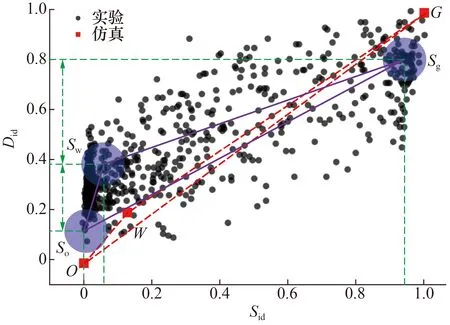
4.ifacosd{double[dot(Nm,0,Sm,0]} 5.thenSm,0进入柱形传光区,变为Sm,i 6.ifacosd{double[dot(Nm,i,Sm,i]} 7. thenSm,i柱形传光区传播 8.ifZm,i 9.thenSm,i进入锥形感应区,变为Sm,j 10.ifacosd{double[dot(Nm,j,Sm,j]} 11.thenSm,j在锥形感应区传播 12.ifZm,j 13.thenSm,j返回柱形传光区,变为Sm,k 14.ifacosd{double[dot(Nm,k,Sm,k]} 15.thenSm,k柱形传光区传播 16.ifZm,k=L+l 17.then EndpointSm,k交端面一点 18.end if 19.elseSm,i折射出柱形传光区 20.end if 21.elseSm,j折射出锥形感应区 22.end if 23.end if 24. elseSm,k折射出柱形传光区 25.elseSm,0无法进入柱形传光区 26.end if 27.end for 28.return Endpoint End 分别将锥形感应区置于油相介质、气相介质与水相介质中,敏感头底面返回光线分布信息,如图3所示。 由图3可知,可以用点的数量来表示返回光线的强度,其中气相中敏感头底面返回光线强度>水相中敏感头底面返回光线强度>油相中敏感头底面返回光线强度,符合光纤传感器对油气水检测信号的响应趋势。从返回光线(点)分布上看,将锥形敏感头底面分为3个区域z1(r 图3 不同介质中锥形敏感头底面返回光线分布图Fig.3 The return light distribution diagram of the bottom surface of the tapered sensor in different medium 依据第2.3节不同介质中锥形敏感头底面返回光线分布结果,基于光学设计软件ZEMAX非序列模式[16]下建立NDR-FOP仿真模型,如图4所示。 在与光源相连的每根光纤的一端均放置一个功率相等的点光源,所有点光源的功率之和为3.75 mW。同样在与探测器1或探测器2相连的每根光纤的一端均放置一个圆形探测器,其尺寸与其对应的光纤横截面大小相同,属性为ABSORB。锥形敏感头形状为30°的圆锥形,材质设置为蓝宝石(Al2O3),直径为600 μm。将介质设置为半径为1 mm的球体。将水箱设置为直径为2 mm,高度为4 mm的圆柱体。 图4 NDR-FOP仿真模型示意图Fig.4 Schematic diagram of NDR-FOP simulation model 在ZEMAX非序列模式下保持所有参数相同的情况下,仅更换NDR-FOP仿真模型中的测量介质(油/气/水),每更换一次测量介质都对NDR-FOP仿真模型进行百万次光线追迹,NDR-FOP在油气水介质中的响应特性如图5所示。其中探测器1与探测器2获取的返回光照强度分别为每层出射光纤获取的返回光照强度之和。 图5 不同介质中探测器1与探测器2的返回光照强度Fig.5 Return light intensity of detector 1 and detector 2 in different medium 由图5可知,敏感头在气相中探测器1与探测器2获取的返回光照强度>敏感头在水相中探测器1与探测器2获取的返回光照强度>敏感头在油相中探测器1与探测器2获取返回光照强度,且同一介质中探测器2获取的光照强度小于探测器1获取的光照强度;敏感头在气相中探测器1与探测器2之间的返回光照强度差距>敏感头在水相中探测器1与探测器2之间的返回光照强度差距>敏感头在油相中探测器1与探测器2之间的返回光照强度差距。为了体现探测器1与探测器2的关系,提出“和特征”与“差特征”两类衡量特征,其中定义探测器1获取的返回光照强度为Id1,探测器2获取的返回光照强度为Id2,探测器1与探测器2返回光照强度之和为Sid,探测器1与探测器2返回光照强度之差为Did,和差特征表示为: 和特征: Sid=Id1+Id2 (7) 差特征: Did=Id1-Id2 (8) NDR-FOP较FOP增加了差特征响应信号,不同介质中的差特征响应如图6所示。 图6 不同介质中的差特征响应Fig.6 Did response in different medium 由图6可知,不同相态中差特征值的响应并不相同。因此,利用差特征可以进行多分相检测,且分相差值特征越大则越有利于介质检测。另外,差特征可以为后续特征融合算法、差值检测模型训练等提供增强多分相检测能力与精度的可能。 由于NDR-FOP由水相刺穿至气相、由油相刺穿至气相及由水相刺穿至油相的响应特性可以体现NDR-FOP刺穿介质的响应特性,本文仅对这3种刺穿情况进行仿真研究。 在ZEMAX非序列中保持所有参数相同的情况下,仅更改介质的z轴坐标,每更改一次z轴坐标都对NDR-FOP仿真模型进行百万次光线追迹。本文将NDR-FOP刺穿介质的动态过程分为2个阶段:ae阶段和fh阶段,其中ae阶段指敏感头由接触介质1外壁(介质2中)直至敏感头全部没入介质1中;fh阶段指敏感头刚穿过介质1内壁直至敏感头全部穿过介质1(介质2中),如图7所示。 图7 NDR-FOP垂直刺穿介质过程Fig.7 Vertical penetration process of NDR-FOP 由图7可知,介质1表示NDR-FOP置于的初始介质,介质2表示NDR-FOP即将刺穿的介质。本文针对NDR-FOP由水相刺穿至气相、由油相刺穿至气相和由水相刺穿至气相等刺穿过程进行仿真分析,NDR-FOP垂直刺穿介质的响应特性如图8所示。 图8 NDR-FOP垂直刺穿介质的响应特性分布图Fig.8 Distribution of response characteristics of NDR-FOP vertically penetrating medium 由图8可知,NDR-FOP由水相刺穿至气相过程中,敏感头开始在水相中(位置a)时,和特征值与差特征值分别为Sidw与Didw;当敏感头由刺穿位置a移动至刺穿位置b过程中,其和特征值与差特征值均逐渐增强;当敏感头由刺穿位置b移动至刺穿位置e过程中,和特征值在Sidg附近波动,差特征值在Didg附近波动;当敏感头由刺穿位置e移动至刺穿位置f过程中,和特征值与差特征值均减小;当敏感头由刺穿位置f移动至刺穿位置h过程中,和特征值在Sidw附近波动,差特征值在Didw附近波动。同样NDR-FOP由油相刺穿至气相、由水相刺穿至油相过程中的和差特征响应与NDR-FOP由水相刺穿至气相过程中的和差特征响应相似,为简单起见,本文对此过程将不再做详细描述。由此可见,NDR-FOP垂直刺穿介质过程中,气相的和特征值(Sidg)与差特征值(Didg)达到最大值,油相的和特征值(Sido)与差特征值(Didg)为最小值,水相的和差特征值(Sidw与Didw)位于气相和差特征值(Sidg与Didg)与油相和差特征值(Sido与Dido)之间。 图8(c)为NDR-FOP垂直刺穿介质的和差特征响应分布图。从差特征响应上看,气水相差特征值之间相差3.5×10-6W,油水相差特征值之间相差1.3×10-6W,其中油水相差特征值之间的变化幅度与气水相差特征值之间的变化幅度相差2.2×10-6W,油水相差特征值之间的变化幅度是气水相差特征值之间变化幅度的37%;从和特征响应上看,气水相和特征值之间相差39×10-6W,油水相和特征值之间相差6×10-6W,其中油水相和特征值之间的变化幅度与气水相和特征值之间的变化幅度相差33×10-6W,油水相和特征值之间的变化幅度是气水相和特征值之间变化幅度的15%。综上,水相差特征值位于气油相差特征值之间且油水相差特征值之间也形成了明显的间距,差特征值的形成提升了油水相区分和检测的能力,因此差特征可以用于多分相检测。相比之下油水相和特征值之间的变化幅度远小于气水相和特征值之间的变化幅度,油水相和特征值较为接近,所以利用和特征并不能较好的进行油水介质检测。 多相流实验平台主要包括输送管线、油罐、水罐、油水分离罐、2个计量泵、气泵、直径为35 mm的垂直上升管道等。如图9所示,动态实验还需新型双接收端光纤传感器(NDR-FOP)、直流电源、多通道数据采集系统及PC机。其中NDR-FOP安装于直径为35 mm垂直上升管道中心。设置多通道数据采集系统中信号采集的采样频率为16 kHz,采样点数为512。多通道数据采集系统将光纤传感器的数字电压信号发送到PC机上。 图9 多相流试验平台示意图Fig.9 Schematic diagram of multiphase flow test platform 在实验中,实验流体为自来水和工业白油。从水箱流出的水、从油箱流出的油和从气泵产生的气分别通过计量泵泵入直径为35 mm的测试管,混合流体通过NDR-FOP进行分相检测。最后,混合流体流入分离罐,通过密度差进行分离,使其循环使用。 4.2.1 实验数据采集 在实验平台上采集多相流工况下NDR-FOP响应数据,其中多相流工况中总流量Q=1.45 m3/h,气流量Qg=0.12 m3/h,水流量Qw=0.7 m3/h,油流量Qo=0.63 m3/h。多相流工况下NDR-FOP输出电压信号如图1所示。 图10 多相流工况下NDR-FOP输出信号波形图Fig.10 Waveform of NDR-FOP output signal under multiphase flow condition 如图10所示,NDR-FOP输出电压信号1与电压信号2的响应趋势保持相同,信号波形整体为低压脉冲与高压脉冲交替输出。其中高压脉冲电压值在2.8 V上下波动,低压脉冲在0.9 V上下波动。 4.2.2 实验结果分析 随机选取多相流工况下72 ms的NDR-FOP输出电压信号,利用式(7)与式(8)对其输出电压信号进行和差特征提取,NDR-FOP和差特征信号波形如图11所示。 图11 NDR-FOP和特征与差特征信号波形图Fig.11 The signal waveform of NDR-FOP’s Sid and Did 由图11可知,和特征高压脉冲信号值在Svg上下波动,低压脉冲信号值在Svl上下波动。气液相之间和特征值差距约为Svwg,油水相之间和特征值相差约为Svwo。油水相之间和特征值的变化幅度远小于气液相之间和特征值得变化幅度,所以,气液相检测效果明显,而油水相检测效果较弱。NDR-FOP较FOP增加了差特征响应波形信号,其中差特征波形高脉冲信号值在Dvg上下波动,低脉冲信号值在Dvl上下波动。气液相之间差特征值相差约为Dvwg,油水相之间差特征值相差约为Dvwo。水相的差特征值位于气油相差特征值之间且油水相差特征值之间也形成明显的间距,形成的差特征能提升油水相区分和检测能力,因此差特征可以用于多分相检测。这一结论与仿真结果基本吻合。 将输出电压信号与仿真光照强度信号分别进行和差特征提取及归一化处理,其和差特征归一化处理结果如图12所示。 图12 多相流工况下输出信号和差特征归一化分布图Fig.12 Normalized distribution of output signal Sid and Did under multiphase flow condition 由图12可知,仿真和差特征数据呈三角形ΔGWO分布,多相流实验的和差特征数据呈三角形ΔSgSwSo区域分布。其中Sw、So及Sg表示水相聚集区域、油相聚集区域和气相聚集区域。由于多相流系统为复杂的连续非线性系统[17]且系统中多相介质的共同作用,导致多相流实验的和差特征数据还存在于交叉区域Swog中。 但从总体上看,多相流实验与仿真模拟的NDR-FOP和差特征响应基本吻合。从仿真模拟和多相流实验的和特征响应上看,气液相和特征中心值区之间数值差距较大,油水相和特征中心值区之间数值较为接近且多数出现了相互交叉的情况,因此气液相检测效果显著,而油水相检测效果较差;从仿真模拟和多相流实验的差特征响应上看,各分相差特征中心值区相互之间未形成难以分辨的交叉区,这一情况有利于多分相区分和检测。而且水相差特征中心值区位于气油相差特征中心值区之间,同时油水相差特征中心值区之间形成了明显的间距。形成的差特征赢得了油水相区分和检测效果。所以基于差特征可以进行多分相检测。这也证明了本文研制的NDR-FOP用于多分相检测是有效的。 本文研制了一种用于石油生产多分相检测的新型双接收端光纤传感器(NDR-FOP),并采用ZEMAX光线追迹方法构建了双接收端环形光纤束耦合光路(DR-RCOP)模型。对锥形敏感头中光线传输过程进行了数学描述与模拟分析,在此基础上仿真分析了NDR-FOP用于多分相检测的性能。对NDR-FOP进行了实验测试研究,仿真及实验结果均表明NDR-FOP可以用于多分相检测。NDR-FOP实现了多参数测量解决了传统光纤传感器测量参数单一的问题,后续工作主要对NDR-FOP结构进行优化设计、信号处理方法等方面开展深入研究。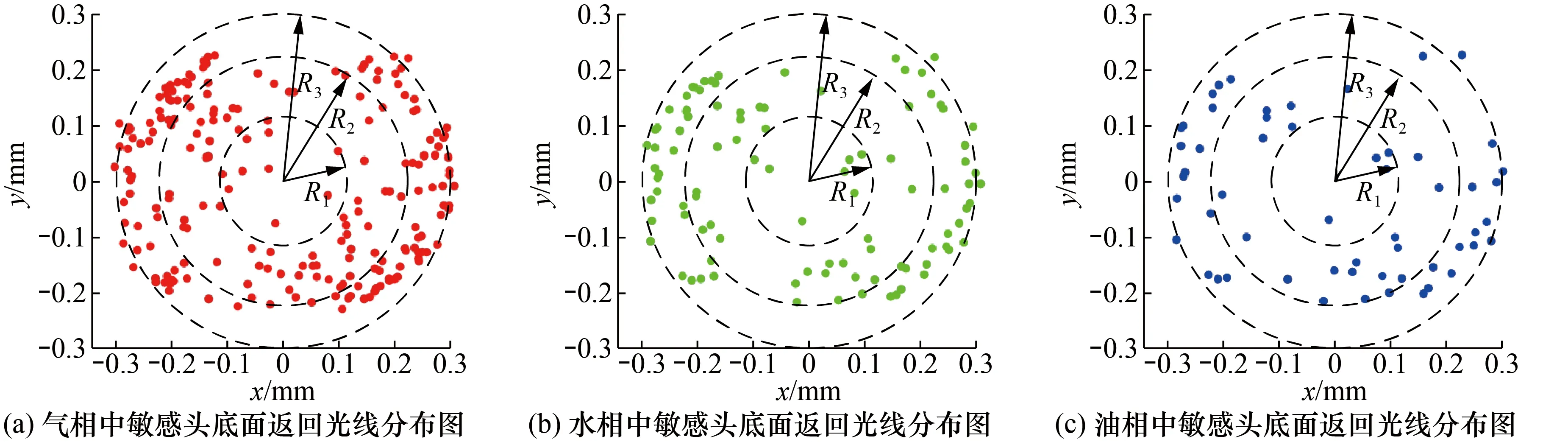
3 光纤束耦合光路设计与仿真分析
3.1 NDR-FOP仿真模型
3.2 NDR-FOP仿真分析

3.3 NDR-FOP垂直刺穿混相介质的响应分析

4 实验与结果分析
4.1 油气水多分相检测实验平台

4.2 实验结果

5 结 论
