基于改进ICP算法的叶片型线轮廓度误差评定
2022-09-21徐旭松王树刚
卢 恒,徐旭松,王树刚,王 皓
(1.江苏理工学院机械工程学院,江苏常州213001;2.无锡市检验检测认证研究院,江苏无锡214100)
1 引 言
叶片是涡轮发动机的核心部件,其型面精度是保证空气动力学性能、可靠性、稳定性的关键元素。高效、精确的评定叶片型线误差对控制叶片加工质量具有重要意义[1]。叶片型面测量有接触式测量与非接触式测量[2],其中接触式测量主要以三坐标测量法为主,是目前精度较高的测量方式之一[3]。三坐标测量叶片主要采用等高法进行测量,由于系统误差及随机误差的存在,需要对测量数据与理论数据之间进行配准,以获得较精确的误差评定结果。
在误差评定的过程中需要解决2个关键问题:①如何寻找实测点在理论轮廓中的对应点,针对这一问题,主要采用的方法是对理论轮廓进行样条函数拟合,用分割逼近的方法对理论轮廓寻求最近对应点;②如何统一实测基准与理论基准的问题,本质是求解实测点集与理论点集的刚性变换矩阵,也即是对实测点集与理论点集的配准问题[4]。
叶片型线的配准分为初配准和精配准。初配准目的是使测量数据与理论数据的空间位姿尽量接近,可以在很大程度减小实测点集与理论点集的位置偏差,给精配准提供良好的初值条件,主要算法有遗传算法[5]、力矩主轴法[6]、三点对齐法[7];精配准可使理论点集与实测点集处于最佳配准状态,目前主要以迭代最近点(iterative closest point,ICP)算法为主。
Yang J L等[8]提出一种全局优化与ICP结合的算法,该算法既能保证配准精度同时加快了收敛速度。Xu G L等[9]提出最大化熵准则的ICP算法,实现有噪声和离群点的二维点集配准。Lamine T M等[10]提出了聚类迭代最近点算法(clustering iterative closet point,CICP),该算法将理论点云中与实际点云中相对应的局部点云进行配准,适合处理密度变化较大的点云。Chetverrikov D等[11]提出了裁剪迭代最近点算法(trimmed iterative closet point,TrICP),通过引入重叠率对点云重叠部分配准,有效降低了未重叠部分配准误差。Wu Z Z[12]等引入最大相关准则(MCC)作为相似性度量,提出了一种鲁棒尺度ICP算法。该算法具有消除异常点和噪声干扰的特点。
本文针对传统ICP算法配准精度较低的问题,提出一种改进ICP算法的叶片型线轮廓度误差评定方法,对传统ICP算法配准结果进行NURBS曲线拟合后,再做进一步精配准[13],有效提高了配准精度。
2 基于矢量对齐法的型线数据初配准
本文在三点对齐法的基础上,基于单条叶片截面线数据有序排列且一一对应的特点,采用一种基于矢量对齐法的型线数据初配准,如图1所示。
设理论点集为Pi(i=1,2,…,n),实测点集为Qi(i=1,2,…,n)。理论点集与实测点集数量相等且一一对应,取理论点集Pi中两点P1、P2,对应实测点集两点为Q1、Q2。由此可以计算初始旋转矩阵R和平移矩阵T。对实测点集Qi分别作用旋转矩阵R和平移矩阵T,可得新的实测点集Qi。
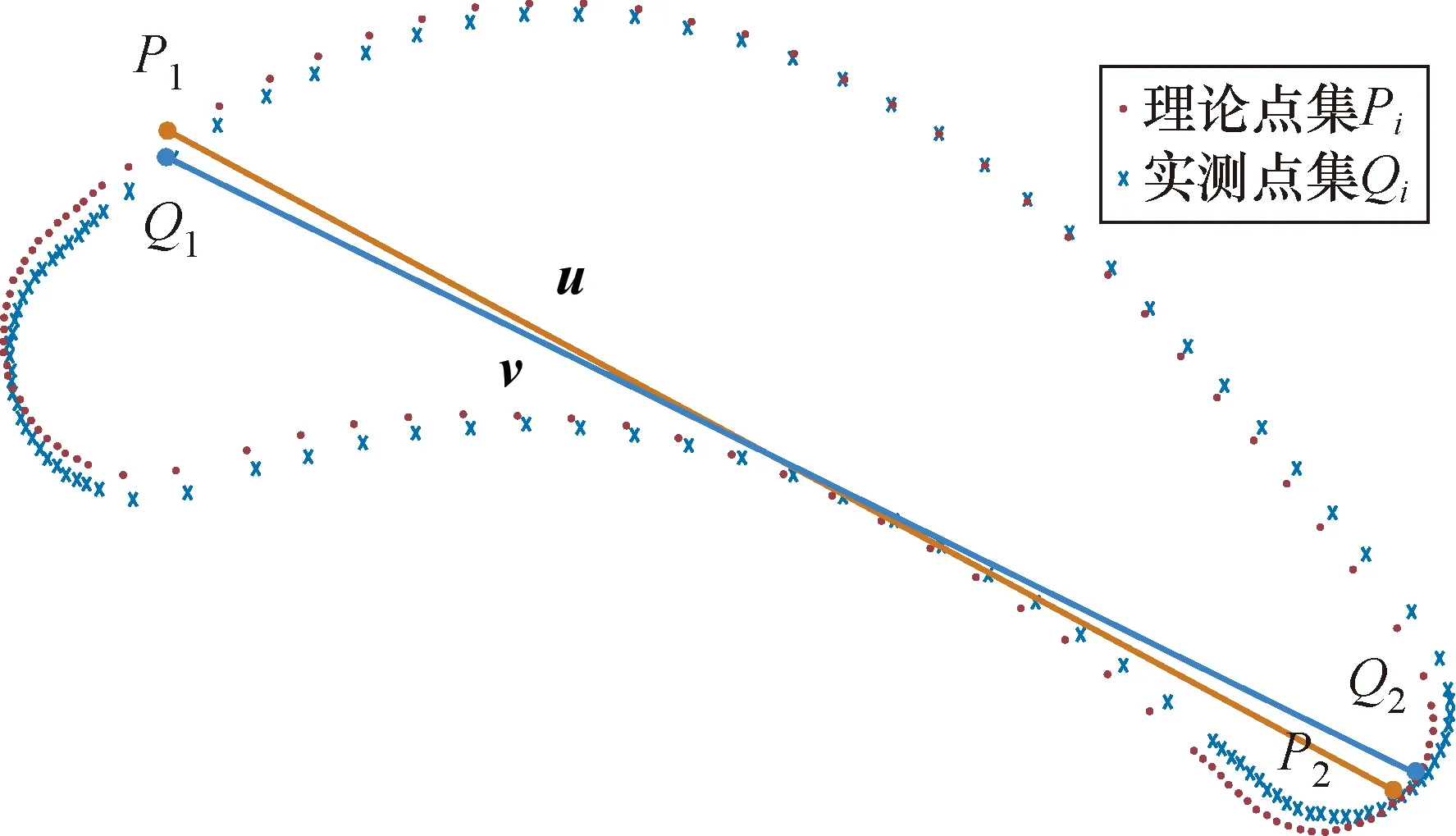
图1 基于矢量对齐法的初配准Fig.1 Initial registration based on vector alignment method
具体步骤如下;
(1) 取理论点集Pi中相对距离较远的两点P1、P2。
(2) 于测量点集Qi中找到对应的两点Q1、Q2。
(4) 若使u,v两矢量方向相同,有如下关系式
|νR×u|=0
(1)
式中:u的方向为P1指向P2,大小为P1到P2的距离;v的方向为Q1指向Q2,大小为Q1到Q2的距离。
(5) 代入点集坐标求得旋转矩阵R。
(6) 对实测点集Qi作用R得更新后点集Si(i=1,2,…,n)。
(7) 对应Qi中Q1、Q2,更新为S1、S2。
(8) 计算平移矩阵,
T=S1-Q1
(2)
(9) 对点集Si作用平移矩阵T,得新的实测点集Qi。
Qi=Si-T
(3)
3 基于改进ICP算法的叶片型线精配准
3.1 传统ICP算法
ICP算法的基本原理为最小二乘法,即对于2个不同坐标系下的点集,通过寻找使点对之间距离平方和最小的旋转矩阵R和平移矩阵T[14]。设Pi(i=1,2,…,n)为理论点集,Qi(i=1,2,…,n)为实测点集,寻找实测点集的变换矩阵使目标函数minF(R,T)最小,数学模型如下:
(4)
算法步骤如下;
(1) 在实测点集Qi中寻找与理论点集Pi对应的最近点点集Pik(k为迭代次数),使得:
(5)
(2) 根据式(4)计算R和T。
(3) 对点集Pi进行作旋转平移变换,
(6)
(4) 计算平均距离dk+1,
(7)
(5) 当dk+1大于终止迭代误差τ时,返回步骤1继续迭代,直到dk+1小于τ或者迭代次数达到预定的阈值为止。
其中步骤(2)的求解主要采用奇异值分解(singular value decomposition,SVD)方法,方法如下:
(1) 分别计算点集Pi,Qi的质心Pc,Qc,
(8)
(9)
(2) 分别对点集Pi,Qi去中心化,
PN=P-Pc
(10)
QN=Q-Qc
(11)
式中:PN,QN为Pi,Qi去中心化的新点集。
(3) 计算矩阵H,
(12)
(4)SVD分解,
H=UΣVT
(13)
式中:U、V为正交矩阵;Σ为对角矩阵。
(5) 求解变换旋转矩阵R0和平移矩阵T0,
R0=V·UT
(14)
T0=Qc-R·Pc
(15)
3.2 改进ICP算法的精配准
由于采用最小二乘法的ICP算法求解变换矩阵存在较大误差,为进一步提高求解精度,设定对原实测点集Qi作用变换矩阵R0、T0所得点集为Qj,对点集Qj进行NURBS曲线拟合。再利用自适应粒子群算法重新求解变换矩阵R、T。
具体步骤如下;
(1) 对点集Qj进行NURBS拟合,得到拟合曲线S,计算曲线S上到理论点集Pi的最近点集Qk,
(16)
(2) 采用自适应粒子群算法[15,16]建立如下适应度函数
(17)
(3) 设置算法参数如下:N为种群数量,一般取20~40,为了提高算法的搜索效果,这里N取为40;c1为自我学习因子,c2为群体学习因子,c1是控制种群中粒子在自己的维度上与最好位置的距离,c2是控制粒子在种群总维度上的最好距离,学习因子太大,则种群随机搜索性能较好,但是种群的收敛性能降低,经过算法调试,这里c1取为0.8,c2为1.2;ωmax为最大惯性权重,ωmin为最小惯性权重,惯性权重随着粒子目标适应值的改变而改变,当粒子目标分散时,减小惯性权重,粒子目标一致时,增加惯性权重,经过算法调试,这里ωmax取为0.8,ωmin为0.1;M为最大迭代次数,经过测试,当迭代次数达到100左右时,目标适应值趋于平稳,这里M取为100;搜索空间维数D为3,也是目标函数的决策变量个数,分别是旋转矩阵的旋转角度、平移矩阵的平面二维方向的平移。
(4) 初始化种群个体,并计算各个粒子的适应度zg,以及全局最优适应度pg。
(5) 进入主循环,更新粒子位移、速度,以及惯性权重,更新规则如下:
x(t+1)=x(t)+v(t+1)
(18)
式中:x(t+1)为粒子更新后的位移;x(t)为更新前的位移;v(t+1)为更新后的粒子速度;t为粒子位移和速度的时间函数。
v(t+1)=ωv(t)+c1r1[pi-x(t)]+c2r2[pg-x(t)]
(19)
式中:ω为初始惯性权重;r1,r2为随机函数rand;pi为个体最优适应度。

(20)
式中:f为粒子实时的目标函数值;favg和fmin分别表示当前所有粒子的平均值和最小目标值。
(6) 将每个粒子的适应值与粒子的最小适应值比较,如果更新后的粒子适应值比最小适应值小,则将更新后的粒子作为最小适应值,否则保留更新前的最小适应值。比较当前所有的个体最佳适应值和群体最佳适应值,并更新群体最佳适应值。
(7) 重复(3),(4)步骤,直到算法收敛或者达到最大迭代次数。
(8) 输出最佳个体,即R和T。
(9) 对点集Qk进行变换,此时实测点集与理论点集达到最佳匹配状态。
4 线轮廓度误差评定
4.1 线轮廓度公差
线轮廓度公差是指被测实际要素相对于理想轮廓线所允许的变动全量,它用来控制空间曲线的形状或位置误差。如图2所示,线轮廓度公差带是包络一系列圆(直径为公差值Tl)的2包络曲线之间的区域,各圆圆心应位于理想轮廓曲线上,其中被测实际轮廓线上的离散测量点必须位于包络一系列圆的两包络曲线之间[17]。

图2 线轮廓度公差带Fig.2 Line profile tolerance zone
4.2 评定方法
目前线轮廓度的评定主要采用最小二乘法和最小区域法,现采用一种基于最小区域法的叶型线轮廓度误差评定方法,如图3所示。
定义包络所有测点的上、下包络线形成的最小距离为轮廓度误差E:
E=du+dl
(21)
式中:du和dl分别为实测点集中在理论轮廓线外、内的最大偏离点。
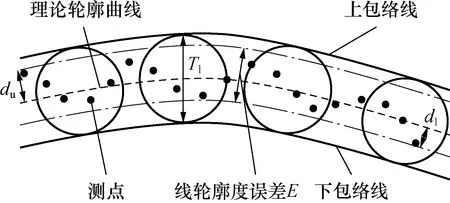
图3 线轮廓度误差Fig.3 Line profile error
5 实例分析
5.1 样本数据
本次实验采用海克斯康三坐标测量机对某涡轮叶片进行测量数据采样,通过误差筛选,得到本次分析数据Pi,共计110个数据点。

5.2 算法分析对比

配准前、后的理论点集Pi与实测点集Qi如图4所示。

图4 配准前、后的理论点集Pi与实测点集QiFig.4 The theoretical point set Pi and measured point set Qi before and after registration
对实测点集Qi进行NURBS曲线拟合,如图5所示。结合自适应粒子群算法对点集进一步精配准,得到两种方法迭代结果局部对比图,如图6所示。
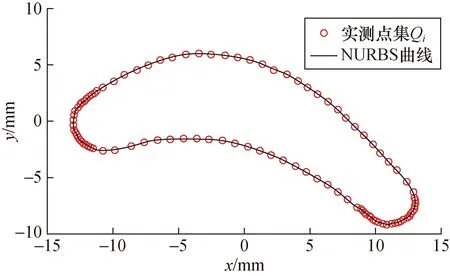
图5 对实测点集Qi进行NURBS曲线拟合Fig.5 The measured point set Qi was fitted with NURBS curve
收敛值F,轮廓度误差E与采用传统ICP算法对比如表1所示。
表1中,最大误差为实测点集对应理论点集中的最大欧氏距离,最小误差为实测点集对应理论点集中的最小欧氏距离。由图6和表1可知:采用改进的ICP算法与传统ICP算法相比,可进一步降低收敛值,从而达到提高两个点集之间配准精度;改进ICP算法比传统ICP算法配准后的最大误差和最小误差更小,轮廓度误差减小28.57%。

图6 迭代结果局部对比图Fig.6 Local comparison diagram of iteration results

表1 配准数据统计表Tab.1 Registration data statistics tablemm mm
综上所述,改进ICP算法和传统ICP算法在配准初始阶段均可使收敛值F快速下降到某一稳定值,但改进ICP算法可以进一步迭代配准,使收敛值F进一步减少。究其原因,主要有两点:一方面,改进的ICP算法对实测点集采用了NURBS曲线拟合,搜索到了理论点集与实测点集之间欧氏距离更小的对应最近点;另一方面,采用自适应粒子群算法对点集进行配准,该算法具有不易过早收敛且不易陷入局部最优的优点,使得收敛结果更为精确可靠。
6 结 语
在三点对齐法基础上提出了基于矢量对齐法的叶片型线初配准,使配准点集的空间位姿更加快速有效的贴合;使用NURBS方法拟合实测点集数据,再利用自适应粒子群算法对实测点集进一步的迭代配准,有效提高了配准精度;最后对配准结果采用基于最小区域法的线轮廓度误差评定,实现了对叶片型线误差的精确评价。实验分析结果表明:改进方法相对于传统ICP算法,可在原有收敛值基础上达到进一步收敛的效果,轮廓度误差相对减小28.57%。该方法有效提高了叶片型线轮廓度误差评定的精确度,从而为叶片的加工质量提供了可靠判定。
