基于MFO-HTN的超视距空战战术机动组合规划
2022-09-16闫孟达俞利新左家亮胡东愿岳龙飞杨任农
闫孟达, 俞利新, 左家亮, 张 滢, 胡东愿, 岳龙飞, 杨任农
(空军工程大学空管领航学院,西安,710051)
空战机动决策一直是军事领域的热点问题之一。空战机动决策的研究方法主要有专家系统[1-2]、矩阵对策[3-5]、优化理论[6]、模糊推理[7-8]和人工智能[9-14]等方法。文献[1~2]在专家系统的基础上结合滚动时域、模糊规则等方法,解决专家系统不够灵活、不可拓展的问题。矩阵对策法需要对当前态势进行准确建模,从而求得当前时刻的最优对策,而超视距空战决策周期长,且态势难以用数学公式准确描述,因此并不适用。文献[6]提出多目标优化结合强化学习的方法,先通过多目标优化得到可行集,再通过强化学习寻找最优解。辛辛那提大学提出遗传模糊树[7],开发了ALPHA空战机器人,并击败了人类飞行员,是空战决策领域最具代表性的成果之一。近年来,随着人工智能浪潮的兴起,越来越多的研究人员开始探索强化学习在空战决策问题上的应用[8-14]。尤其是DARPA在2020年举办的“阿尔法”空中格斗竞赛[15],基于强化学习的空战智能体大比分战胜了人类飞行员,展示了智能空战的巨大研究潜力。
以上研究推动了空战决策的自动化和智能化,目前关于近距格斗的研究比较成熟,相对而言,关于超视距空战智能决策的研究并不充分,超视距空战决策的研究难度主要体现在3个方面:一是现有研究对空战态势的描述大多还是基于优势函数,如角度优势函数、距离优势函数、能量优势函数等,此类函数无法准确描述超视距空战的态势;二是两者的核心问题不同,近距空战要求在短时间内抢占发射位置,对瞬时大机动的能力要求较高,而超视距空战更关注“机动时机”问题,根据双方相对距离等态势要素决策何时开始机动、机动多长时间、何时发射导弹以及如何规避导弹等问题;三是相比于近距空战,超视距空战决策周期长、决策边界不清晰,这使强化学习方法很难训练出可解释和可接受的超视距空战智能体。
而现代空战最主要的形态是超视距空战,因此当前急需研究高效、合理的超视距空战决策方法。本文针对超视距空战机动决策问题,提出基于战术机动组合的规划方法,引入层次任务网络(hierarchical task network, HTN),并通过多目标优化算法对其进行参数优化,仿真结果表明该方法能够输出高效的超视距空战战术执行序列。
1 超视距空战机动描述
空战战术机动动作复杂多样,很难一一列举,但复杂的战术动作可以由基础的机动动作组合而成。目前常见的机动动作有两种划分方式,依据操作方式进行划分的操作机动动作[16-17]和依据战术动作理论进行划分的战术机动动作[18]。美国NASA研究人员将机动动作划分为7类基本操纵机动[19],分别为:最大加速,最大减速,最大过载爬升,最大过载俯冲,最大过载左转,最大过载右转及稳定飞行。这7种基础动作是从飞行员的角度,根据操作控制变量来进行划分。从战术效果角度,可以将7类基本动作进行初步的组合实现、归类细化,得到常用的6种基本的战术机动动作[19],如图1所示。

图1 6种战术机动示意图
其中,侧转和蛇形机动是在水平面的机动,桶滚可以看作是蛇形机动同时进行垂直面的机动,俯冲、斤斗、半斤斗是在垂直面上的机动,而斤斗和半斤斗多用于近距空战,本文暂不考虑。因此,超视距空战机动可以分为两类:“侧转+垂直面机动”“蛇形+垂直面机动”。本文用参数化语言来描述这两类机动[20],侧转机动为一个四元组φ,η,γ,h,其中为转弯角度(°),η为过载(g),γ为坡度(°),h为降高(m),表示载机在进行侧转机动的同时完成高度差为h的垂直面机动;类似地,蛇形机动为一个六元组i,t,φ,η,γ,h,其中i表示蛇形机动中的转弯次数,t表示每次转弯的时间间隔。当机动参数被指定后,完成此次机动所需要的时间也就确定了。如,侧转机动180,4,60,2 000和蛇形机动2,5,120,4,60,2 000,分别如图2(a)、(b)所示。

图2 2种战术机动示意图
通过以上2种类型的机动组合,就可以实现各种复杂的超视距空战战术。
2 基于HTN的战术机动组合模型
2.1 层次任务网络规划
HTN规划的思想与专家求解问题的思维方式十分相似,因而受到广泛的推崇。HTN规划的基本思想是利用相关领域专业知识,结合专家在实际过程中的相关经验,递归地将复杂的任务网络顺序分解,逐层细化,直到分解成为一个个可以直接独立执行的原子任务为止[21]。以系统给定的初始状态、领域知识、任务目标作为输入,输出完整的、可执行的动作方案。初始状态主要是系统在规划前初始时刻的状态信息;领域知识即指规划域,包括操作集合和方法集合,操作集合主要描述执行动作的前提条件和效果,方法集合是描述任务分解的途径和相关要求;任务目标是任务网络的起点,也是任务分解后进行执行的总目标。动作方案主要是一系列动作,构成了问题的规划解。HTN规划在任务的表达和分解、任务分派、任务完成上优势比较突出,对任务分解和细化比较符合作战人员的思维模式,利用HTN算法及其思想来对军事问题进行规划、求解和执行更容易被理解和接受。
HTN规划中最关键的部分就是方法集合,以“处方”的形式告诉系统如何对任务进行分解。
2.2 空战HTN模型
HTN规划中的主要元素包括任务、方法和操作。其中,任务表示可分解的任务;操作表示不可分解的原子任务,在本文中为单次机动;方法包括条件和分解方法,具体描述了在何种态势下如何完成任务,是HTN规划的关键。在空战HTN规划中,“任务”即要执行何种战术,“操作”即单个战术机动,多个战术机动组合完成一个战术,“方法”表示在何种态势下如何建立空战HTN网络。
图3 攻击区划分示意图
在超视距空战中,相对距离和攻击区的关系是进行决策的重要依据。文献[22]提出基于目标机机动的五线攻击区,如图3所示,本文在此基础之上,从以下3个方面描述空战态势:①敌我相对距离与敌机攻击区的关系;②双方的相对航向;③敌机是否发射导弹。
若某种态势下需要执行“侧转+侧转+蛇形机动”的战术组合,则HTN规划见图4。
图4 空战战术机动HTN规划示意图
3 GA-HTN参数优化算法
3.1 优化模型
HTN规划确定了空战机动的顺序,但与一般HTN规划中的操作不同,空战机动由参数确定,且机动和机动之间有一定时间间隔,如图5所示,仿真开始后在t1时刻进行机动1,机动1完成后间隔t2进行机动2,之后间隔t3进行机动3。

图5 规划参数序列示意图
在机动参数给定的情况下,影响空战结果的主要是时间参数,需要通过算法进行寻优,优化目标为:①机动时间间隔之和最小;②达成发射条件的时间最长;③达成发射条件的平均距离最小。优化模型为:
(1)
式(1)是一个多目标优化问题,多目标优化问题会得到一系列帕累托最优解,不符合空战辅助决策的需求,因此将公式(1)中3个优化目标归一化后转换为单目标问题,如公式(2):
(2)
3.2 MFO-HTN算法流程
3.2.1 MFO算法原理及流程
飞蛾扑火优化算法[23](moth-flame optimization algorithm, MFO)是一种新型智能优化算法,具有调节参数少、收敛快、不易陷入局部最优等优点。MFO算法的思想源于飞蛾沿等角螺旋路径朝火焰飞行的现象[23],飞蛾是在搜索空间内移动的个体,火焰表示某一只飞蛾当前看到的最优解。在飞蛾朝向火焰飞行的过程中,如果发现了更好的火焰,则更新火焰的位置。算法规定一只飞蛾对应一个火焰,因此能够避免陷入局部最优。
本文中,M为飞蛾矩阵,OM为飞蛾适应度值矩阵,F为火焰位置矩阵,OF为火焰适应度值矩阵,分别如式(3)和(4)所示。
(3)
(4)
式中:n为飞蛾的个数;d为待求变量的个数。
根据适应度值对火焰位置从小到大进行排序,飞蛾分别围绕排序后的火焰,根据式(5)进行等角螺线飞行。
Mi=Diebtcos(2πt)+Fj
(5)
式中:Mi为第i只飞蛾的位置,Di=|Mi-Fj|表示第i只飞蛾与第j个火焰的距离;b为等角螺线参数;t为路径系数。
为提高算法的搜索效率,MFO采用火焰自适应减少机制,舍掉一些较差的火焰,使得飞蛾不用在劣解附近继续寻优,加快收敛速度。火焰数量自适应减少公式为:
(6)
式中:NF为当前火焰数量;N为最大火焰数量;i为当前迭代次数,I为最大迭代次数。
MFO算法流程[24]如下。
步骤1 飞蛾种群初始化。设置飞蛾数量、最大迭代次数、求解问题维度等参数。
步骤2 飞蛾位置初始化。在搜索空间中随机生成飞蛾位置,令迭代次数i=1。
步骤3 将飞蛾位置按适应度值从小到大排序后赋给火焰,作为第1代火焰的位置。
步骤4 更新飞蛾位置,将飞蛾位置适应度和火焰适应度重新排序,更新火焰位置。
步骤5 自适应减少火焰数量,迭代次数i=i+1。
步骤6 判断是否达到最大迭代次数,是则输出最优火焰位置,否则转步骤4。
3.2.2 MFO-HTN算法流程
适应度是用来度量种群中个体优劣的指标,适应度函数的设定决定算法的收敛程度和目标函数最优解。将优化目标转化为适应度函数为:
(7)
其中δ为正值常数,确保适应度函数值为正。
MFO-HTN规划流程如图6所示。
图6 MFO-HTN超视距空战规划流程图
4 仿真实验
4.1 仿真条件设置
仿真的初始态势参数包括相对距离、相对方位、相对航向角、双机的高度和速度,本节的算例设置如表1所示。

表1 初始态势参数
设敌机在0时刻发射一枚导弹,则当前空战态势满足以下描述:① 我机处于敌机的Ω3区域中;②双方为正迎头态势;③ 敌机发射一枚导弹。此时空战HTN规划网络如图7所示。
图7 空战HTN规划网络
相应的机动参数设置如表2所示。

表2 机动参数设置
4.2 飞蛾赴火算法优化结果
将本文方法与传统的遗传算法(GA)、粒子群算法(PSO)进行对比,图8展示了3种算法的收敛曲线对比。为了加快收敛速度,使算法满足实时性要求,本文限制了算法仅搜索整数解。
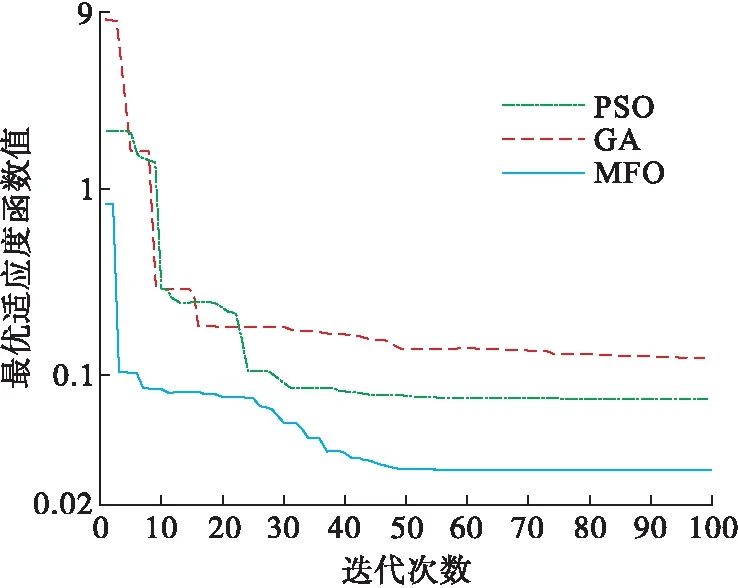
图8 算法对比
由图8可以看出,3种算法均在第50代就基本达到收敛状态,但GA和PSO算法收敛到了局部最优,MFO算法搜索精度更高,且收敛速度更快。MFO算法搜索到最优解为t1=5 s,t2=1 s,t3=4 s。
则最终得到的空战机动执行序列如图9所示。
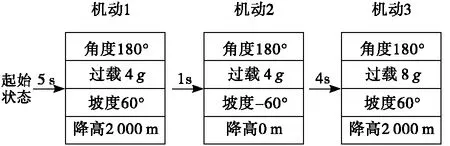
图9 空战机动执行序列
4.3 空战仿真结果
设仿真起始时刻为0时刻,整个空战仿真过程持续114 s,可分为3个阶段,见图10~12。
1)阶段1。敌机在0时刻发射一枚导弹,我机在5 s开始采取侧转180°机动来规避敌方导弹,同时敌机采取偏置机动保持对我机的压迫,见图10。

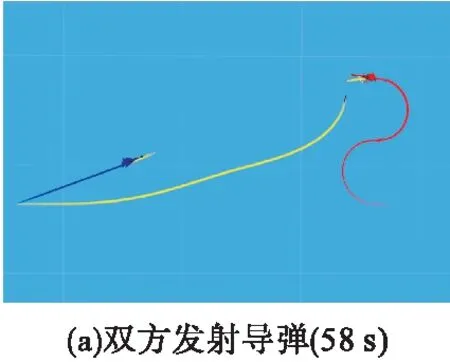
2)阶段2 。我机完成导弹规避后立刻形成了对敌机的锁定并发射一枚导弹,而敌机也同时发射了第2枚导弹。我机保持对敌机的锁定4 s后完成中末制导交接,导弹导引头开机,进行最后一次侧转180°机动,见图11。
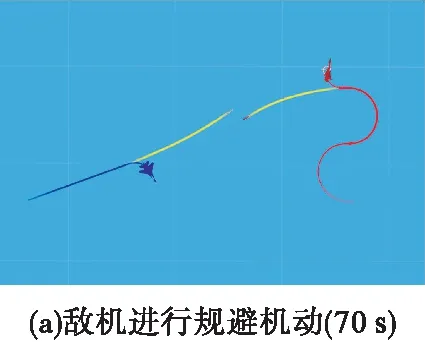
3)阶段3。70 s时,敌机向下做侧转机动规避我机发射的导弹,但在107 s时被击落,而我机随后在114 s 时完成了对敌机第2枚导弹的规避,仿真结束,见图12。
5 结语
本文提出的MFO-HTN超视距空战机动规划模型在引入专家经验的基础上,建立多目标优化模型,采用飞蛾扑火优化算法对空战HTN模型参数进行优化,能够输出高效、可解释的超视距空战战术机动执行序列。研究成果可以为飞行员提供辅助决策,也为研究智能超视距空战提供了新的思路。下一步研究如何将HTN模型与模糊推理、强化学习等算法相结合,构建更灵活、可扩展的超视距空战战术模型。
