基于空间曲柄摆杆机构的扑翼飞行器驱动机构设计与分析
2022-09-15方越杨晔
方越, 杨晔
基于空间曲柄摆杆机构的扑翼飞行器驱动机构设计与分析
方越, 杨晔*
(上海师范大学 信息与工程学院,上海 201418)
为了提高扑翼飞行器的飞行性能,借鉴生物的飞行运动特征,设计了一种基于空间摆杆机构的新型多自由度扑翼机构.通过运动学分析建立了扑翼飞行器驱动机构的运动学模型,利用Matlab对驱动机构运动学方程进行求解分析.结果表明:所设计的驱动机构通过单自由度驱动,就能够完成扑动、扭转耦合运动,其中上扑动幅度为64.098°,下扑动幅度为-64.098°,扭转角度为69.422°~99.327°,并且能够输出与生物飞行时翅翼相同的“8”字型轨迹,具有良好的气动性能.
扑翼飞行器; 空间曲柄摆杆; 结构设计; 运动学分析
0 引 言
随着航空航天事业的发展,固定翼和旋翼的应用已经处在成熟阶段,但当飞行器尺寸较小时,传统的固定翼和旋翼飞行器的飞行动能和气动性能会大幅降低.扑翼飞行器通过模仿鸟类的运动原理,实现举升、悬停和推进功能.与固定翼和旋翼相比,扑翼飞行器可以消耗较少的能量进行长距离飞行.
但是,自然界中鸟类常见的翅膀运动轨迹呈空间椭圆形和“8”字形.两种运动方式都是通过扭转、扑动和偏转3种运动方式复合而成.ZHANG等[1]通过对比分析“0”字和“8”字形扑动方式,得出“扑动加扭转”的运动方式可提升飞行器的升力和推力.不规则“8”字形扑动和扭转的运动方式可增加翼面的周期平均推力,减小平均升力,以增加运动速度[2].
为了追求机械机构的简单化,目前研究人员设计了很多只能做到扑动或者扭转的扑翼机构.XU等[3]提出空间曲柄摇杆扑翼机构,利用空间曲柄摇杆结构,实现翅膀扑动的对称性;PORMSIN-SIRIRAK等[4]利用单曲柄摇杆结构,设计出第一个尺寸仅有巴掌大的扑翼飞行器,利用翅膀上下扑动带来的升力来提供飞行动力,而其柔性翅膀通过形变,可以实现小幅度的扭转,但翅膀的理论运行轨迹与真实情况存在较大的差异.其他扑动和扭转的机构大多由多组连杆组合而成,结构较为复杂.因此,设计一款既能够实现扑动和扭转运动,结构又相对简单的机构,将更加有利于扑翼飞行器的微型化,降低生产成本和难度,可为扑翼飞行器的发展提供重要的参考.
本文作者结合空间四杆机构特性的单自由度扑翼机构,设计一种新型“扑动加扭转”的运动方式,通过Matlab软件对机构进行数据求解,得到输出轴的运动情况.该机构的结构形式简单,并能够使翼尖输出轨迹呈空间“8”字形,其飞行轨迹符合真实情况.
1 驱动机构的设计
XU等[3]所设计的空间曲柄摇杆机构,连杆之间仅依靠球副进行连接,两侧翅膀只能够在水平方向上同步上下扑动.根据对称性的原则,翅膀所提供的升力与中心轴对称,即两侧受力完全相同,无法完成倾斜或者转弯的动作.CONG等[5]设计了一种基于空间RURS四杆机构的扑翼机构,ZHANG等[6]设计了偏置式空间RSSR四连杆急回仿生扑翼机构.这两种扑翼机构同时运用了多种摇杆、连杆和曲柄,能够完成扑动和扭转的运动形态,并且翅膀顶端的输出轨迹呈“8”字形,符合鸟类飞行的特点,但其结构复杂,对于结构之间的配合精度要求较高.

图1 构件仿真图
本研究利用圆柱副设计空间结构,通过圆柱副在竖直杆上的同轴移动来完成扑动,通过圆柱副在非竖直方向轴的移动和旋转来完成扭转,如图1所示.3个圆柱副之间互相配合,完成扭转加扑动的合成运动,使机构的运动轨迹接近鸟类翅膀的运动规律.本研究结构上仅选用圆柱副,圆柱副是低副,相较于高副,其对精度要求更低,长时间使用对其本身结构的精度影响较小,不会影响灵敏度.
此外,在面对湍流时,除了大面积采用柔性材料的翼面进行被动抵消局部环境干扰之外,本研究还能够通过调整自身翼面的倾斜角度来主动躲避或减小脉动对其的干扰.
2 运动学分析
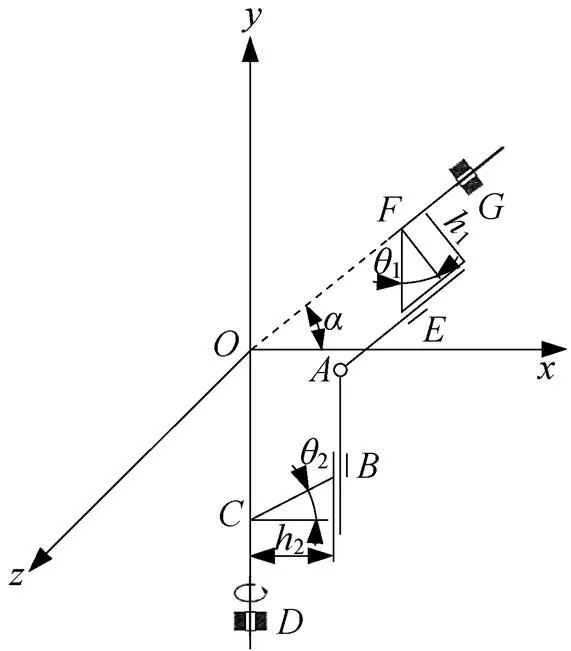
图2 结构设计图
2.1 机构概述
本研究机构(图2)由1个曲柄、2个连杆和1个摇杆构建组成,输入轴、主动传动杆、从动传动杆、输出轴.其中,为曲柄,和为连杆,为摇杆.延长,交于点,并以的延长线为轴,建立空间直角坐标系.同时,,分别于机架和翼面形成旋转轴,;与形成圆柱副;与形成圆柱副;与形成转动副.定义与的垂线夹角为1,到的距离为1;与的垂线夹角为2,到的距离为2.

2.2 自由度计算
采用断开机架法求解机构自由度,将机构从机架处断开为两部分:单开链机构和单开链末杆.单开链的自由度为:

2.3 理论运动分析
根据所构建的空间坐标系建立空间方程确定顶端运动轨迹:


当和位于同侧时,圆柱副中点到旋转副距离为d,其表达式为:

其中,d为到的距离.
旋转副到转折点的距离为:

扭转角为:

扑动角为:
根据鸟类和昆虫飞行特性,最大扑动角与最小扑动角的差值应大于120°.

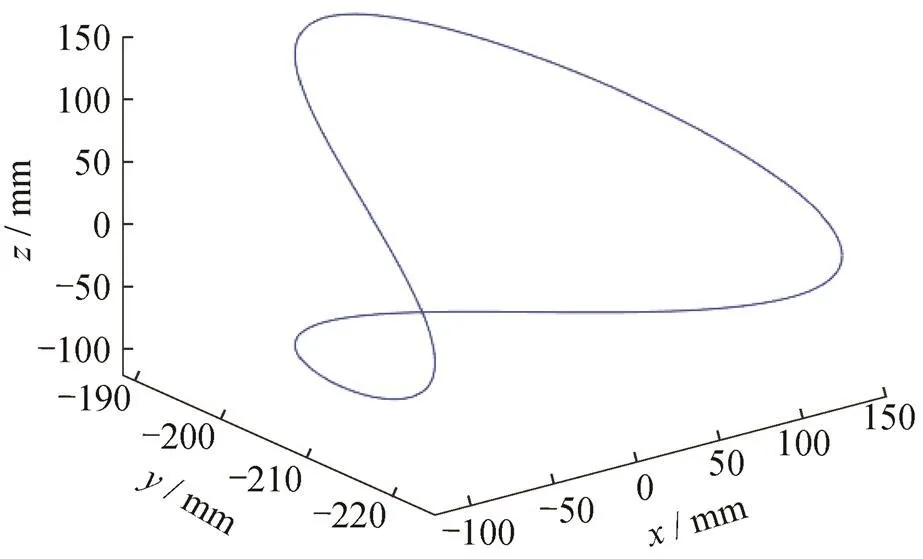
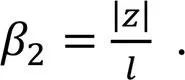
图3 输出轴运动轨迹
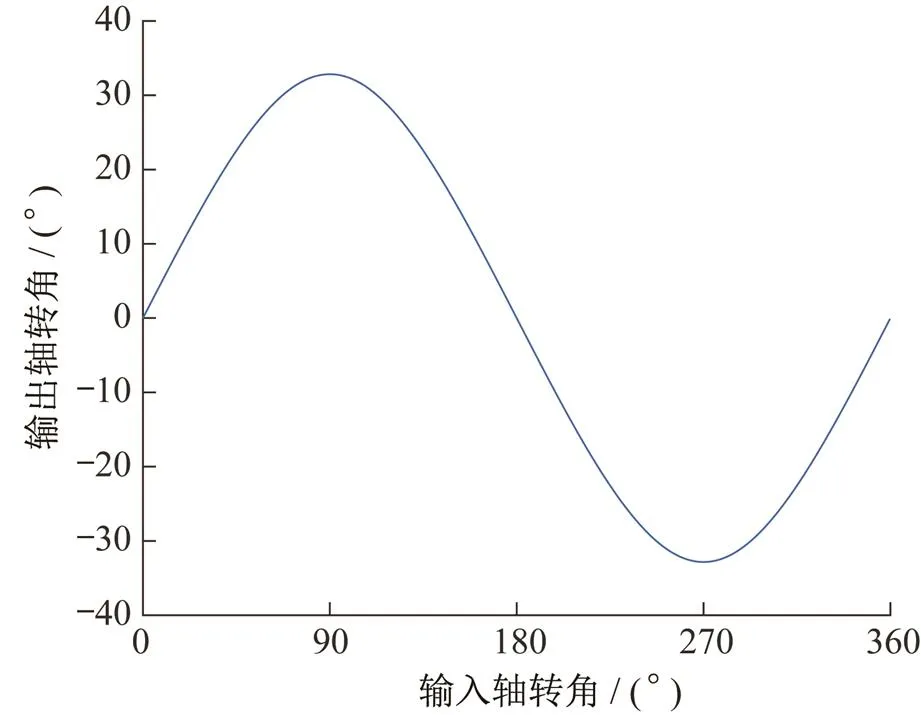
图4 输出轴转角与输入轴转角关系图

图5 输出轴速度与输入轴转角关系图
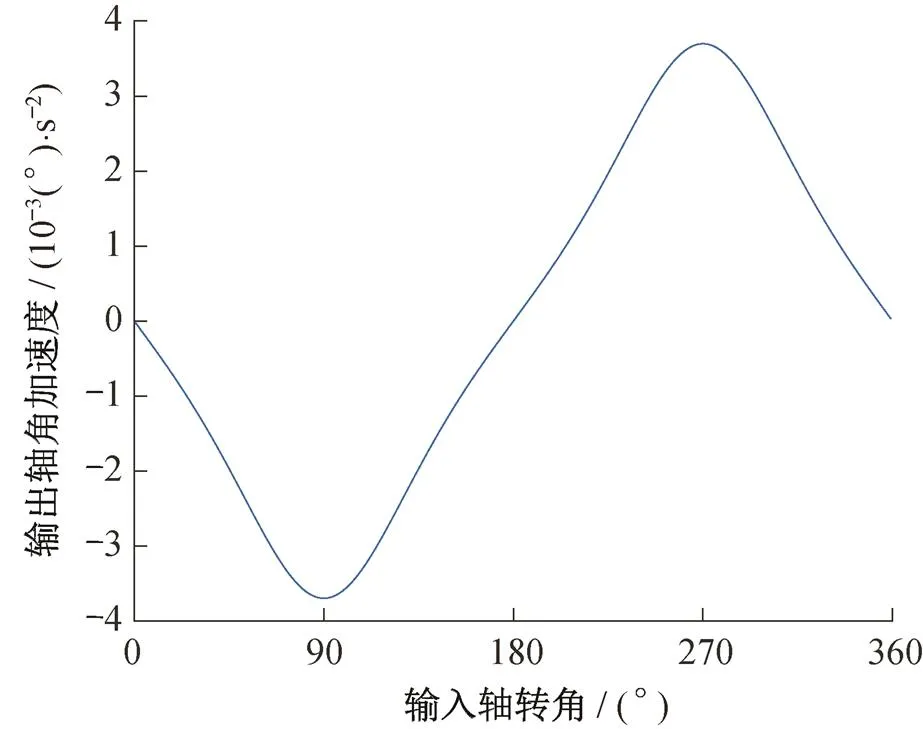
图6 输出轴转角加速度与输入轴转角关系图
由图3可知,运动轨迹呈“8”字形,轴的范围在-122.00~122.00 mm,轴的范围在-225.00~-189.05 mm,轴的范围在-122.00~122.00 mm.轴数值越大的位置,运动范围越大.该运动轨迹符合鸟类飞行的规则,验证了该模型的理论正确性.
根据图4~6可知,输出轴的运动随输入轴呈周期性变化,周期为360°.当输入角为270°时,输出角最小,为-32.84°;当输入角为90°时,输出角最大,为32.84°,且输出轴与输入轴的转角呈正弦关系.当输入角为180°时,输出轴角速度最小,为-0.31(°)·s-1;当输入角为0°时,输出轴角速度最大,为0.31(°)·s-1,输出轴角速度与输入轴转角呈现余弦关系.当输入角为90°时,加速度最小,为-0.003 7(°)·s-2;当输入角为270°时,加速度最大,为0.003 7(°)·s-2.
图7为扑动角随时间变化的关系图.由图7可知:扑动角在-64.098°~64.098°呈现周期性连续变化,周期为0.2 s,在0.05 s时,达到最大;在0.15 s时,达到最小,最大值和最小值相差128.196°,满足扑动角差值大于120°的要求.
图8为扭转角随时间变化的关系图.由图8可知:扭转角在69.422°~99.327°呈现周期性变化,周期为0.1 s,在0.05和0.15 s时,达到最大;在0,0.10和0.20 s时,达到最小,最大值和最小值相差29.905°.

图7 扑动角角度与时间关系图
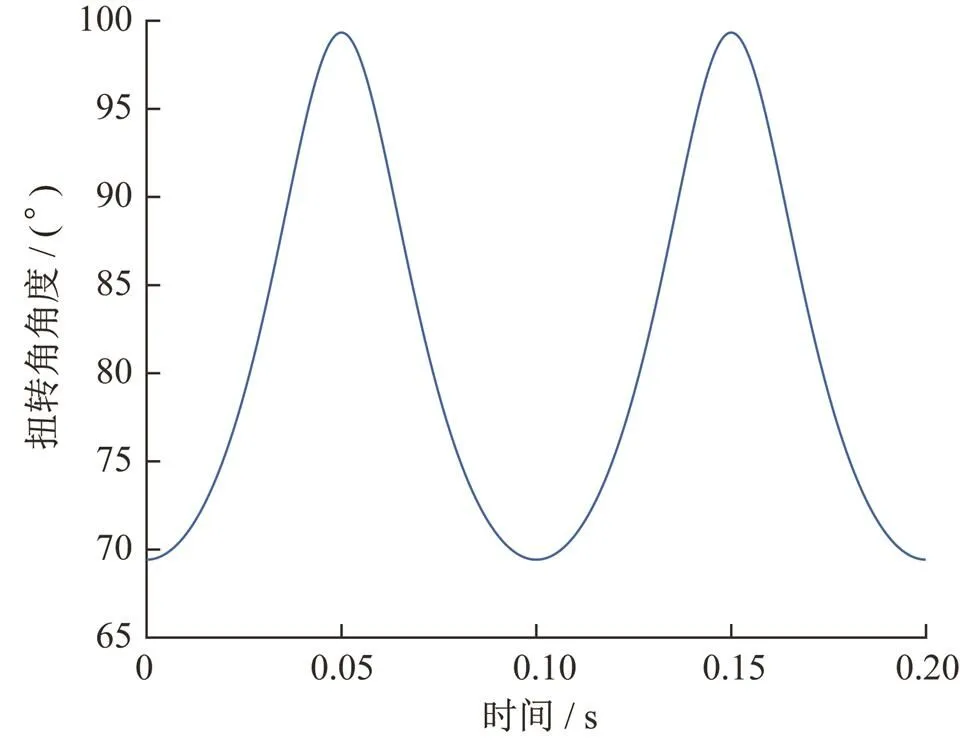
图8 扭转角角度与时间关系图
3 结 论
基于鸟类飞行原理,设计一种空间扑翼机构,并且对其进行了运动学分析,得到了以下结论:
1) 驱动机构输出角转角的最小值为-32.84°,最大值为32.84°,且输出轴与输入轴的转角呈现正弦关系;速度的最小值为-0.31(°)·s-1,最大值为0.31(°)·s-1,输出轴角速度与输入轴转角呈现余弦关系;加速度的最小值为-0.003 7(°)·s-2,最大值为0.003 7(°)·s-2,此时输入角为270°.
2) 机构机翼运动轨迹呈“8”字形.
3) 机构上扑动幅度为64.098°,下扑动幅度为-64.098°,扭转角度为69.422°~99.327°.
4) 结构设计简单,对精度的要求相对较低,机翼运动同时考虑了扑动和扭转,运动形式更加贴近现实规律.
[1] ZHANG H M, YANG W Q. Investigation of “0”-figure and “8”-figures wingtip path effect on aerodynamic performance of micro flapping-wing [J]. Advances in Aeronautical Science and Engineering, 2016,7(1):44-50.
[2] SUN Y. Study on aerodynamic characteristics of flapping wings motion mode and geometric feature [D]. Changchun: Jilin University, 2018.
[3] XU Y C, ZONG G H, BI S S, et al. Design and analysis of a spatial crank-rocker flapping-wing mechanism [J]. Journal of Aerospace Power, 2009,24(2):204-208.
[4] PORNSIN-SIRIRAK T N, TAI Y C, HO C M, et al. Microbat: a palm-sized electrically powered ornithopter [C]// Proceedings of the NASA/JPL Workshop on Biomorphic Robotics. Pasadena: NASA, 2001:14-17.
[5] CONG M L, LI J L. Design and analysis of three-dimensional bio-inspired flapping win mechanism based on spatial RURS linkage [J]. Journal of Aerospace Power, 2019,34(3):692-700.
[6] ZHANG R K, HE W, WANG X S. Optimal design of RSSR quick-return bionic flapping-wing mechanism in offset space [J]. Mechanical Science and Technology for Aerospace Engineering, 2021,11(3):200-207.
Design and analysis of driving mechanism of flapping-wing aircraft based on space crank-swing rod mechanism
FANGYue, YANGYe*
(College of Information, Mechanical and Electrical Engineering, Shanghai Normal University, Shanghai 201418, China)
In order to improve the flight performance of the flapping-wing aircraft,a novel multi-degree of freedom flapping-wing mechanism based on the space pendulum mechanism was designed by referring to the flight motion characteristics of living things. The kinematic model of the driving mechanism of the flapping-wing aircraft is established through kinematics analysis,and then,the kinematic equation of the driving mechanism is solved and analyzed by MATLAB. The results show that the designed driving mechanism can realize flutter and torsion coupled motion through single-degree-of-freedom drive. And it can output the same “8”-shaped trajectory as the wings of the biological flight,and has good aerodynamic performance.
flapping-wing aircraft; space crank pendulum; structural design; kinematics analysis
10.3969/J.ISSN.1000-5137.2022.04.020
2022-04-04
国家自然科学基金(51605298)
方 越(2000—), 女, 本科生, 主要从事机械设计及控制方面的研究. E-mail: 190151763@smail.shnu.edu.cn
杨 晔(1985—), 女, 副教授, 主要从事智能制造、人机交互和柔性电子器件方面的研究. E-mail: yangye0707@shnu.edu.cn
方越, 杨晔. 基于空间曲柄摆杆机构的扑翼飞行器驱动机构设计与分析 [J]. 上海师范大学学报(自然科学版), 2022,51(4):539‒543.
FANG Y, YANG Y. Design and analysis of driving mechanism of flapping-wing aircraft based on space crank-swing rod mechanism [J]. Journal of Shanghai Normal University(Natural Sciences), 2022,51(4):539‒543.
TH 112
A
1000-5137(2022)04-0539-05
(责任编辑:包震宇)
