大口径、高精度二维快速控制平面反射镜系统设计
2022-09-13康登魁姜昌录刘力双赵俊成陈青山王生云王楠茜陈洁婧张云龙
康登魁,姜昌录,刘力双,赵俊成,俞 兵,陈青山,王生云,王楠茜,陈洁婧,张云龙,王 雷
(1.西安应用光学研究所,陕西 西安 710065;2.北京信息科技大学 仪器科学与光电工程学院,北京 100192)
引言
光电搜索跟踪系统是信息化武器的核心装备,当目标进入光学视场后,伺服系统会捕获锁定目标,然后进行跟踪,保证目标始终位于光学测量的视场内,同时记录目标相对瞄准线的偏离程度,即跟踪精度。跟踪精度指标是表征作战能力的关键参数,也是维修保障中的一个重要方面[1-2]。
跟踪精度测试主要分室内测试和室外测试两种形式。其中,室内检测设备主要有检测架、信标光和可编程动态靶等形式,室外测试主要采用在靶场跟飞的试验形式。检测架式测量一般将被测系统固定,相对被测仪器中心安装多个平行光管,平行光管对应某些方位角度及俯仰角度,平行光管出射的平行光会聚在焦平面上,在焦平面上设有分划来模拟无穷远目标供光电设备跟踪测量。这种方法的优点是稳定性好,检测精度容易保证,但也存在体积较大、不易维护的缺点。
目前应用较多的是信标光法,该方法采用旋转信标光装置或激光模拟信标光装置产生动态靶标,这种方法的优点是运动范围大,但运动频率和精度受限于二维转台,难以精确模拟高精度快速运动目标[3-10]。
采用基于二维快速控制反射镜(fast steering mirror,FSM)的模拟信标光法,可以在实验室内产生1 个动态模拟的运动目标,实施精确高速扫描运动,从而开展高精度跟踪精度的测量。但是,目前大多数FSM 应用口径局限在Φ100 mm 以内,已经不能满足部分应用需求。本文根据上述测量需求,设计了一种大口径、高精度二维快速控制反射镜,以满足在实验室内进行跟踪精度测量的实际需求。
1 系统组成及工作原理
FSM 总体构成如图1 所示,主要包含机械部件和测量控制部件两大部分。其中机械部件主要包括平面反射镜、柔性支撑铰链、反射镜托架、位移测量模块、总体装配结构、驱动电机、锁止机构等;测量控制部件主要包括精密测量模块、核心控制模块、电机及其驱动模块等。

图 1 二维快速控制反射镜组成框图Fig.1 Composition block diagram of two-dimensional FSM
FSM 工作原理如图2 所示,驱动电机驱动反射镜组件产生俯仰和方位2 个方向的高速摆动,由位移测量模块对摆角进行测量,实现闭环控制。

图 2 二维快速控制反射镜工作原理示意图Fig.2 Working principle diagram of two-dimensional FSM
其中,平面反射镜是定向控制组件的输出端,在系统光路中直接参与光指向的调整。柔性支撑铰链为包含反射镜及其托架的扭转载荷提供弹性支撑,使其围绕回转中心做出俯仰和方位2 个方向的运动。位移测量模块主要用于测量反射镜的偏转角,用于闭环控制反馈及偏振角信号输出,均布多个非接触式微位移传感器,实现精密差动实时测量。核心控制模块用于电路逻辑控制、控制算法实现以及信息输入输出等,其基于DSP 完成设计,集成控制、测量输入输出通道、驱动电路、通信接口、电源变换等功能。电机及其驱动模块用于驱动反射镜偏转,采用音圈电机(voice coil motor,VCM)实现致动。
2 结构设计
根据跟踪精度的测试要求,快速控制反射镜需要采用45°吊装结构进行光线出射,通光口径为15.24 cm。因此,采用椭圆形的镜面结构,镜面尺寸通过以上要求进行设计。长轴直径D0=D/cos45°,经过计算,长轴尺寸为215.6 mm。考虑到边缘面形质量会有所下降,两边保留一定的设计余量,最终快速控制反射镜长轴尺寸为230 mm,短轴尺寸为160 mm。
另外,平面反射镜的镜面面形对整个系统的成像质量具有决定性的影响,一般与材料、加工、镀膜、安装和使用环境有关。考虑到微晶玻璃具有较小的热膨胀系数,在温度变化时能够较好地保证面形精度。因此,本系统最终采用微晶玻璃作为反射镜材料,实际面形精度为λ/30(RMS),如图3所示,能够满足成像系统的使用要求。
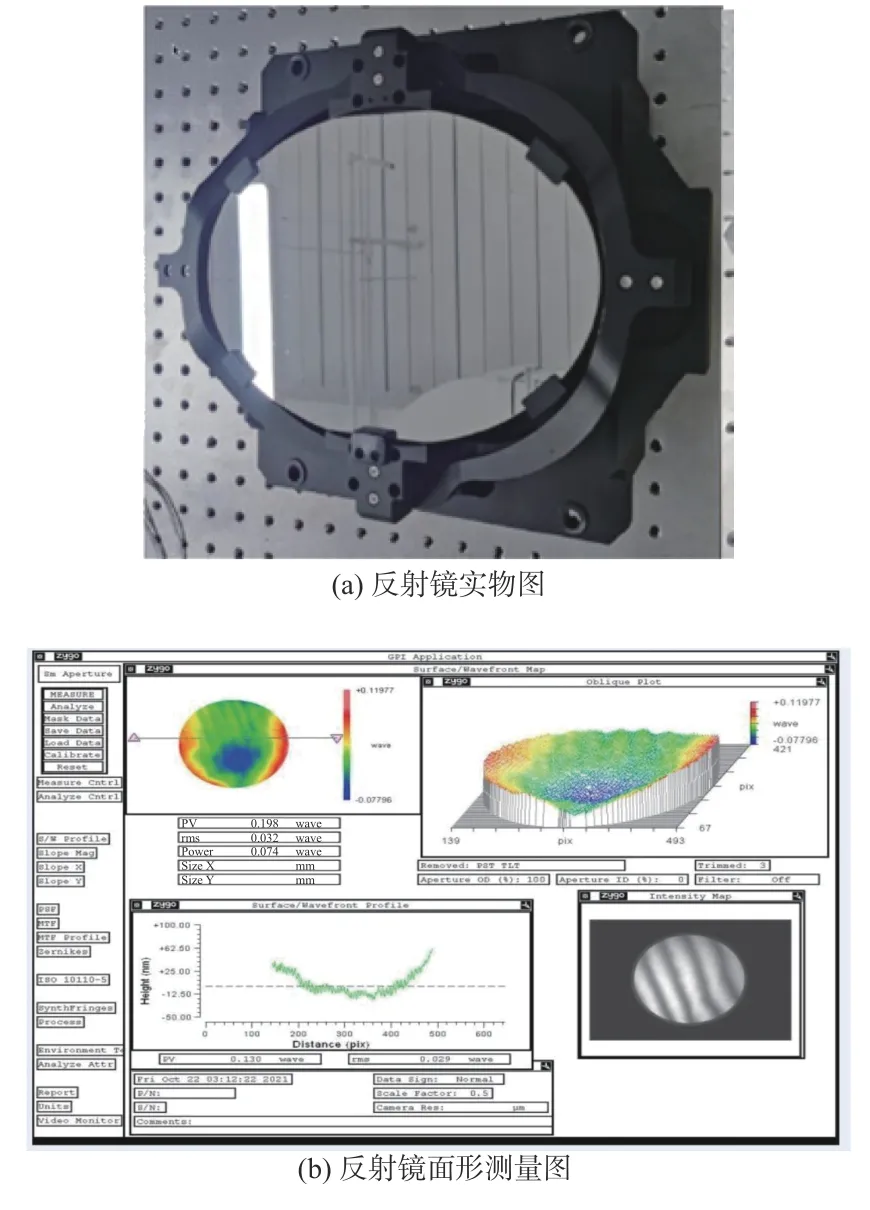
图 3 反射镜实物及面形测量图Fig.3 Mirror and surface measurement diagram
快速控制反射镜支撑组件主要由刚性结构和柔性结构两种方式组成,其中柔性支撑结构避免了刚性支撑的空回和机械磨损等缺点,可以有效地消除大部分运动耦合,使2 个自由度保持相对独立。因此,本文快速控制反射镜设计了4 个柔性铰链,分别位于水平和垂直方向。
驱动组件是快速控制反射镜的动力来源,采用4 个音圈电机驱动组件,音圈电机驱动方式采用洛伦兹力原理,可以获得较大的角度范围,如图4所示。

图 4 音圈电机实物图Fig.4 Physical photo of voice coil motor
快速控制反射镜的最终结构设计如图5 所示,其结构主体外形尺寸为260 mm×306 mm×101 mm。

图 5 二维快速控制反射镜结构设计图Fig.5 Structural design diagram of two-dimensional FSM
3 电控系统组成
FSM 电路组成如图6 所示。快速控制反射镜驱动电路与上位机之间采用RS422 标准全双工通信接口,通信波特率为115.2 kbps±0.5%,RX-FIFO和TX-FIFO 的容量要求各不小于16 字节。上位机将快速控制反射镜控制命令发送给主控制器,主控制器通过传感器读取快速控制反射镜的偏转信息,并按照上位机控制命令驱动快速控制反射镜,使快速控制反射镜达到上位机命令要求。快速控制反射镜驱动电路通过4 线SPI 串口向上位机返回快返镜两轴角度数据,要求两轴角度采集精度为16 bit,采集速率为50 kHz,SPI 串口通信速率为10 MHz,SPI 数字信号均采用5 V TTL 电平[11-15]。
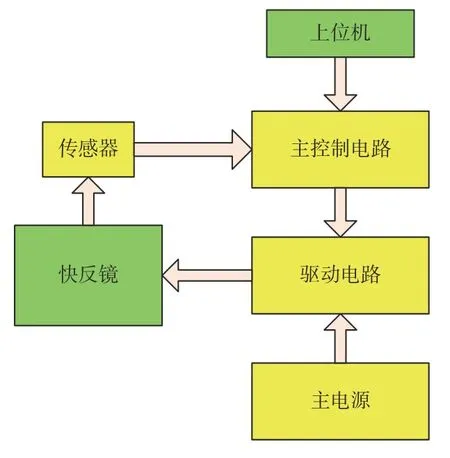
图 6 快速控制反射镜控制电路组成框图Fig.6 Composition block diagram of control circuit of FSM
控制电路主要由4 个部分组成:传感器电路、主控制电路、驱动电路和主电源电路。
3.1 传感器电路组成
快速控制反射镜的位置偏转信息由电涡流传感器进行检测,将传感器探头(电感线圈)放置在被测目标附近,交流电流激励线圈,当探头与被测金属之间的距离发生变化时,由于电涡流效应,线圈的阻抗也发生变化。通过交流电桥将线圈的阻抗变化检测出来,并经过检波、滤波、放大等过程转化为直流电压变化,即将探头与被测面之间的位移变化转换为直流电压的变换。电涡流传感器组成如图7 所示。
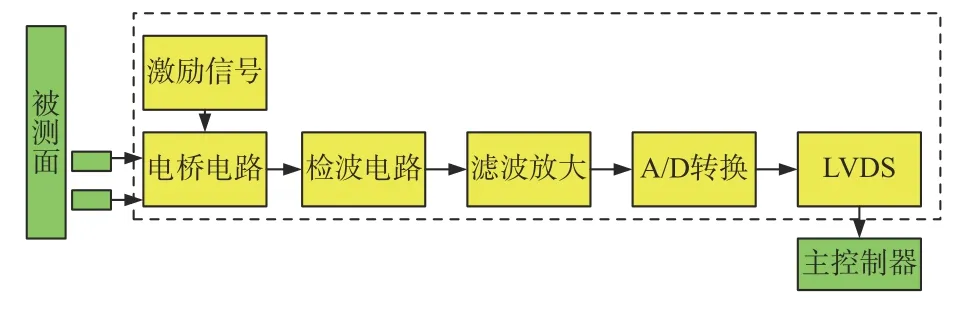
图 7 电涡流传感器测试电路组成框图Fig.7 Diagram of eddy current sensor test circuit
激励信号源高频激励电桥,电桥将被测面的偏转信息转换成交流信号的幅值变化信息,检波电路将交流电压幅值信号转化成直流信号,经放大滤波后送A/D 转换器,由主控电路读取。
3.2 主控制电路组成
主控制电路和驱动电路采用一体化设计。控制核心采用DSP 方式,上位机与主控制板之间采用422 通信,传感器和主控制板之间采用LVDS电平的SPI 通信,如图8 所示。快速控制反射镜的驱动采用高输出电流驱动芯片驱动,具有使能控制、高温及过流保护功能。

图 8 主控制电路组成框图Fig.8 Composition block diagram of main control circuit
驱动信号和使能/锁止用于控制快速控制反射镜的工作状态,电流检测用于检测驱动电流,电源系统用于主控制器和传感器对驱动电源的供电,如图9 所示。
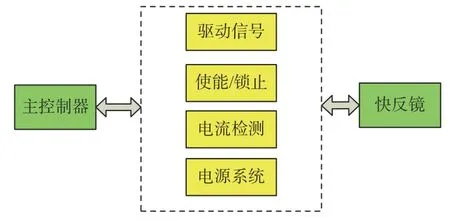
图 9 驱动电路组成框图Fig.9 Composition block diagram of drive circuit
3.3 传感器设计
精密位移测量模块是整个摆镜组合控制的基准。其工作原理如图10 所示,镜片与传感器的距离位置会随镜片转动角度而变化,该位移变化量由1 对差分微位移传感器测量,根据偏转位移量及测量节圆换算出偏角值。

图 10 精密位移测量模块结构原理图Fig.10 Structure diagram of precision displacement measurement module
具体采用2 组具有较好环境适应能力的非接触微位置传感器,分别差分测量水平方向(X轴)及俯仰方向(Y轴)的镜片转动角度。当前精密位置测量模块为20 位分辨率,信号噪声占3~4 位,其理论分辨率可达1/60 000 以上,镜托偏转角分辨率可优于1 μrad。结合外部自准仪标定设备以及标定经验方法,快速控制反射镜在小角度(±1°)范围内的线性度可以达到0.4‰,即±6.9 μrad 以内。
FSM 工作流程设计如图11 所示,上电后,组件进行自检。若自检通过,组件将根据用户设定进入相应的工作模式,否则报故障码并执行异常处理。
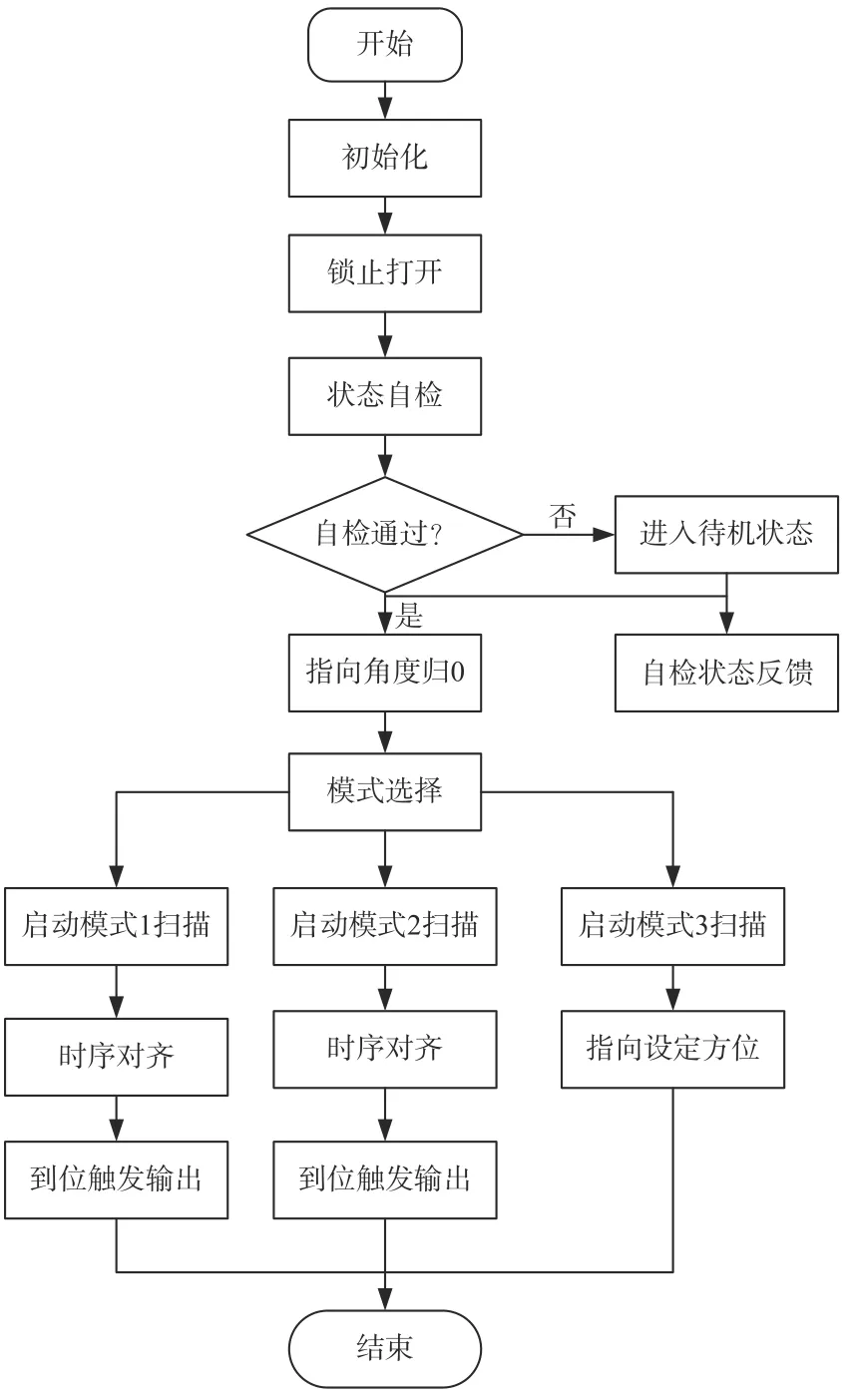
图 11 二维快速控制反射镜工作流程图Fig.11 Workflow chart of two-dimensional FSM
快速控制反射镜接收上位机的轨迹扫描指令,得到要扫描的轨迹和速度,控制快速控制反射镜按照预定的角度和速度运动。运动过程中测量快速控制反射镜的传感器位置读数与期望位置值的偏差,并快速调整音圈电机,从而完成内部闭环控制,驱动快速控制反射镜完成精确的轨迹扫描,采用标准422 接口通信方式,波特率为230.4 kbps,8 数据位,1 停止位,可以实现圆形轨迹运动、直线轨迹运动和随机运动形式[16-18]。
最终,本文系统快速控制反射镜的设计指标为:有效通过口径15.24 cm;运动范围60 mrad (±30 mrad);带宽100 Hz;角分辨率≤1 μrad;重复性≤±4 μrad;运动控制线性度优于±0.20%;快速控制反射镜运动控制精度5 μrad。
4 快速控制反射镜性能测试结果
4.1 带宽测试
快速控制反射镜系统的带宽通常采用1%行程的-3 dB 带宽法进行测试。测试原理为:系统通过计算机向快速控制反射镜发送指令,控制其在各频率下等幅摆动,并产生相位同步信号供相位频率测量。扫频完成后,通过上位机分析光斑位置数据,即可产生相应的幅频及相频特性数据。根据幅频特性数据的-3 dB 位置,即可完成快速控制反射镜带宽的测量。
测试步骤为:固定好激光器,使其发射出的光路不变;激光器发射出的光线射到镜面上,快速控制反射镜每次摆动都会使折射的L光线发生相应的变化;控制快速控制反射镜以不同的引导频率余弦摆动;折射出的光线照在PSD (position sensitive detector,PSD)传感器上,PSD 传感器感知L光线的位置变化,从而将位置量转化成电信号。将电信号也就是表1 中的幅值记录下来,由1 Hz 逐渐增加引导频率,记录对应的幅值变化。当幅值下降到初始幅值的0.707 倍(即-3 dB 增益)时,此引导频率即为其对应的工作带宽。增益的计算方法是20×log10(实际幅值/1 Hz 对应的幅值)。
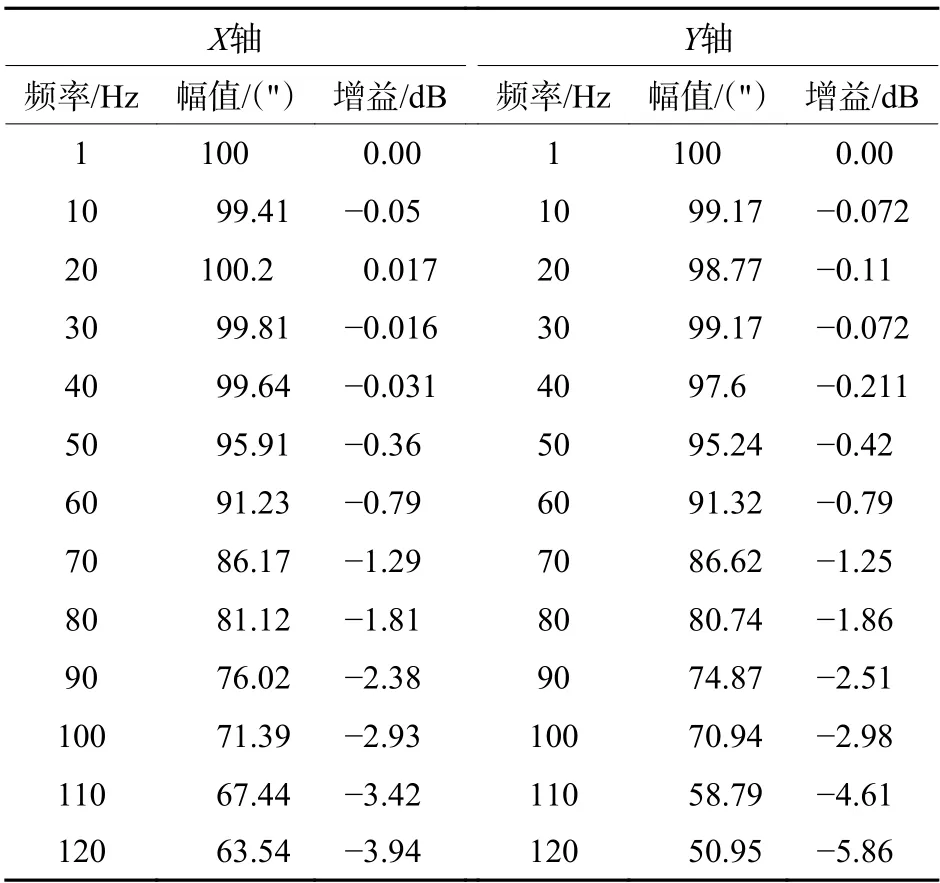
表 1 带宽测量结果Table 1 Bandwidth measurement results
快速控制反射镜带宽体现的是系统抗扰动能力的高低,只有当FSM 的带宽达到设计要求时,才能够满足实际的使用要求。本文采用基于FSM 模拟信标光法进行跟踪精度测试时,控制带宽需要达到100 Hz。如表1 所示,在1 Hz 时,系统的输入幅值为100";当频率逐渐增加到100 Hz 时,X轴和Y轴所对应的幅值分别为71.39"和70.94"。因此,根据-3 dB 法,FSM 的带宽满足100 Hz 的使用要求。
4.2 角分辨率测试
快速控制反射镜系统的角分辨率是其平面反射镜所能调整的最小角度。角分辨率的测试方法由测试计算机给快速反射镜输入方波信号,并不断减小方波幅值,自准直仪能够反馈反射镜角度值;当观测角度由可分辨转为不可分辨时,光电自准直仪的角度值已无明显变化,即可得到快速控制反射镜的最小角分辨率。
根据指标,要求快速控制反射镜的角分辨率达到1 μrad,约为0.2"。因此,设置X轴和Y轴方向的步进幅值角为0.2"。根据输出波形,直接观测能否达到角分辨率的要求。
X轴和Y轴方向的输出波形如图12 所示。由图12 可以看出,快速控制反射镜的实际角度值与上位机发送的角度值一样,呈阶梯状增加,能够分辨出0.2"的偏转角度。因此,快速控制反射镜的角分辨率满足1 μrad 的指标要求。
4.3 线性度测试
线性度测试采用自准直仪,当快速控制反射镜上电后做直线运动,在光电自准直仪中观察、记录直线上的坐标点实际值,然后求出偏差值,其线性度应满足优于±0.2%的要求。
测试步骤为:二维快速控制反射镜电控箱上电,输入二维快速控制反射镜驱动器的零位电压;调整自准直仪的位置,使自准直仪的出射光束与经二维快速控制反射镜反射后的光束重合,即反射光束的“十字”光标位于自准直仪的视场中心;固定Y轴,通过控制计算机向二维快速控制反射镜电控箱发送指令,驱动反射镜绕X工作轴方向转动,以取点的方式记录正行程各位置的角度值yi正和反行程各位置的角度值yi反;根据直线拟合方程计算出正反行程的最大偏差 ΔLmax;然后计算线性度。
线性度测量结果如表2 所示。以目标角度为横坐标、正反行程的角度平均值为纵坐标,采用最小二乘法进行曲线拟合,如图13 所示。则其拟合直线为:

图 12 分辨率测量结果Fig.12 Resolution measurement results


表 2 线性度测量结果Table 2 Linearity measurement results
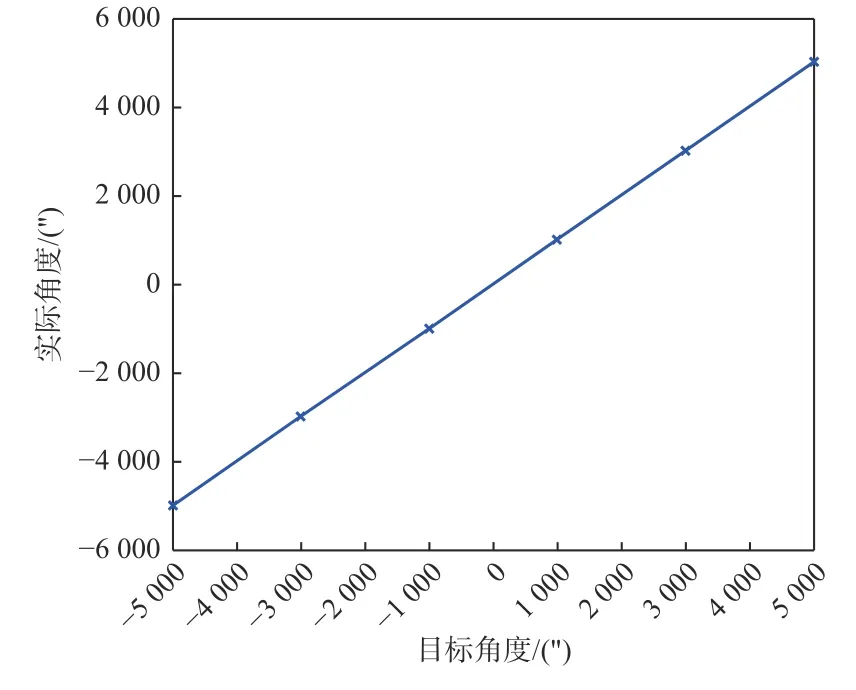
图 13 X 轴线性度拟合直线Fig.13 X-axis linearity fitting straight line
根据测量结果,X轴(方位)方向的最大偏差为5.9",Y轴(俯仰)方向的最大偏差为9.5",则FSM的线性度为

式中:ΔLmax为目标角度与实际角度的最大偏差;YFS为最大偏差所对应的设定角度值。根据(2)式所计算出的线性度结果如表2 中的最后两列所示。从表2 中可以看出,X轴(方位)方向的线性度为0.197%,Y轴(俯仰)方向的线性度为0.19%,满足±0.2%的使用要求。
4.4 重复定位精度测试
快速控制反射镜的重复定位精度通过3σ进行表征,其测试方法是首先分别计算正反行程每个测试点的子样标准差σi正和σi反,则快速控制反射镜的重复定位精度为3σ。
测试步骤为:二维快速控制反射镜电控箱上电,输入驱动器零位电压,调整自准直仪的位置,使自准直仪的出射光束与经二维快速控制反射镜反射后的光束重合,即反射光束的“十字”光标位于自准直仪的视场中心;改变驱动器电压,使反射镜从零位偏转到正方向1 000"、2 000"、3 000"处。当FSM 输出角度稳定后,记录 1 min 内自准直仪显示的实际偏转角度的平均值xi,yi;改变驱动器电压,使反射镜从零位偏转到负方向-1 000"、-2 000"、-3 000"处。当FSM 输出角度稳定后,记录 1 min 内自准直仪显示的实际偏转角度的平均值xi,yi;根据(3)式和(4)式计算重复定位误差。具体测量结果如表3 所示。

表 3 重复定位精度测量结果Table 3 Repetitive positioning accuracy measurement results
在各个测试点,标准偏差按(3)式进行计算:

式中:xj为X方向各次的角度测量值;x¯为各次测量角度的平均值。则X方向的重复定位精度为

Y方向与X方向计算方法相同。表3 中,根据实际使用情况,将偏转的角度秒值转换为μrad,测量结果如表3 中所示,其重复定位精度为4 μrad。
5 结论
快速控制反射镜在激光对抗、目标侦察、激光合束、稳像、精密跟踪等军事领域有着广泛的需求。本文设计了长、短轴分别为230 mm 和160 mm的椭圆形二维快速反射镜,经过测试,其运动控制线性度优于±0.2%,角分辨率优于1 μrad,重复性优于4 μrad,可以实现两维匀速、加速等连续运动。在内部控制固定模式下,可以完成匀速、圆周等扫描模式,能够满足光电系统跟踪精度测试过程中的光束模拟问题。未来,随着技术的发展,军事领域对大口径、高带宽的快速控制反射镜需求会越来越多,具有广泛的应用前景。
