探测器像元尺寸对航空光电系统成像性能影响分析
2022-09-13王惠林吴雄雄蒋萧村
王惠林,吴雄雄,蒋萧村
(西安应用光学研究所,陕西 西安 710065)
引言
航空光电成像系统在目标搜索、捕获、瞄准、情报监视与侦察(ISR)、驾驶与导航、威胁告警、态势感知和持久型情报监视与侦察(PISR)等军事任务中发挥着越来越重要的作用[1]。作为光电成像链路的核心-成像探测器更是严重影响光电成像系统性能的关键器件。国外对光电成像探测器的研究较早,在1970年代就进行过探测器不同结构器件的工作机理研究,发现了边缘场效应、热扩散、自感应电场等对探测器电荷转移效率的影响因素,并且给出了探测器光电转换响应的计算方法。同时也对探测器沟道内部的电势分布,转移效率以及频率噪声特性等一系列参数展开了研究[2]。随后研究人员开始对光电成像探测器进行数学仿真研究,主要针对光电探测器内部载流子亚泊松分布的理论、电极间边缘场电势分布的理论进行研究,对热致势垒变化对光电荷转移效率的影响机理,以及器件的其他性能进行模拟,为光电成像探测器的理论分析进行了更加细致的工作[3-4]。近年来,随着集成电路电子技术和工艺水平的长足进步,以及光电成像系统对广域高分辨率侦察监视成像等应用场景的要求越来越多,光电成像探测器正向着更大面阵和更小像元尺寸发展。那么,更大面阵和更小像元的探测器对光电成像系统性能会产生哪些影响,在系统工程设计中应该如何选用合适的探测器,本文下面进行重点讨论。
1 像元尺寸对探测器性能的影响
探测器性能参数评价包括探测器阵列结构、电荷转换效率、光谱响应、噪声、帧率、阱容量、像元尺寸、数据读出、采样等多个方面[5]。与大像元探测器相比,一方面,小像元探测器由于容纳的光子数有限,导致满阱容量小,在较低的入射光强下就能饱和;另一方面,小像元探测器具有更高的空间分辨率,可以更好地体现目标细节。通过探讨探测器的动态范围、信噪比和调制传递函数与探测器像元尺寸的关系,可进一步了解探测器的性能。
1.1 像元尺寸与探测器动态范围的关系
探测器动态范围(dynamic range,DR)定义为探测器产生的最大非饱和信号与最小可探测信号的比值[5],描述了成像光强的适应范围,即图像传感器能够响应的最大非饱和光强与最小可探测光强(通常由系统的噪底决定)的比值。因此,探测器动态范围对不同亮度背景下目标成像细节的展现有很大影响。由于光电成像系统中光电探测器可以近似为一个积分光子计数器[6],因此,我们可以用简化的数学模型对探测器动态范围进行描述[7],如下式[7-8]所示:

式中:qmax表示最大电荷阱容量(C);q表示电子电荷(q=1.6×10-19C);id表示暗电流(fA);tint表示积分时间(s);表示读出噪声方差(电荷数)。
DRdetector以分贝形式表示为

公式(1)和公式(2)中,qmax-idtint代表最大非饱和信号(在制冷探测器等某些近似计算中,可以忽略暗电流影响[5]),qmax与探测器架构、相位数和像元尺寸有关,并近似与像元尺寸面积成正比[5]。DRdetector随像元尺寸的理论变化关系如图1 所示。日本KODAK 和美国ON Semiconductor 公司生产的多个不同型号CCD、CMOS 性能参数如表1 所示。图1 中也给出KODAK 和ON Semiconductor公司生产的多个不同型号CCD、CMOS 实测的动态范围与像元尺寸的变化关系。从图1 中可以看出,随着像元尺寸的增大,DRdetector增加,探测器对于入射光强适应范围增大,可以展现更亮和更暗背景下目标成像细节。
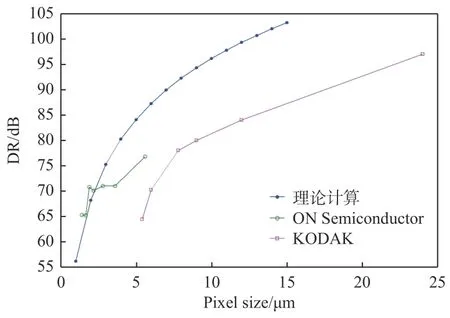
图 1 DRdetector 随像元尺寸的变化关系Fig.1 Variation relationship of DRdetector with pixel size
1.2 像元尺寸与探测器信噪比的关系
探测器信噪比(SNRdetector)定义为探测器产生的信号功率与平均噪声功率的比值。描述了目标和背景辐射亮度差引起的信号载流子变化量与噪声载流子的比值,影响目标和背景成像对比度[6]。与前文描述的探测器模型相同,本文采用积分光子计数器的简化数学模型描述SNRdetector,公式如下[7]:

式中:iph表示光电流(fA);id表示暗电流(fA);q表示电子电荷(q=1.6×10-19C);tint表示积分时间(s);表示读出噪声方差(电荷数)。
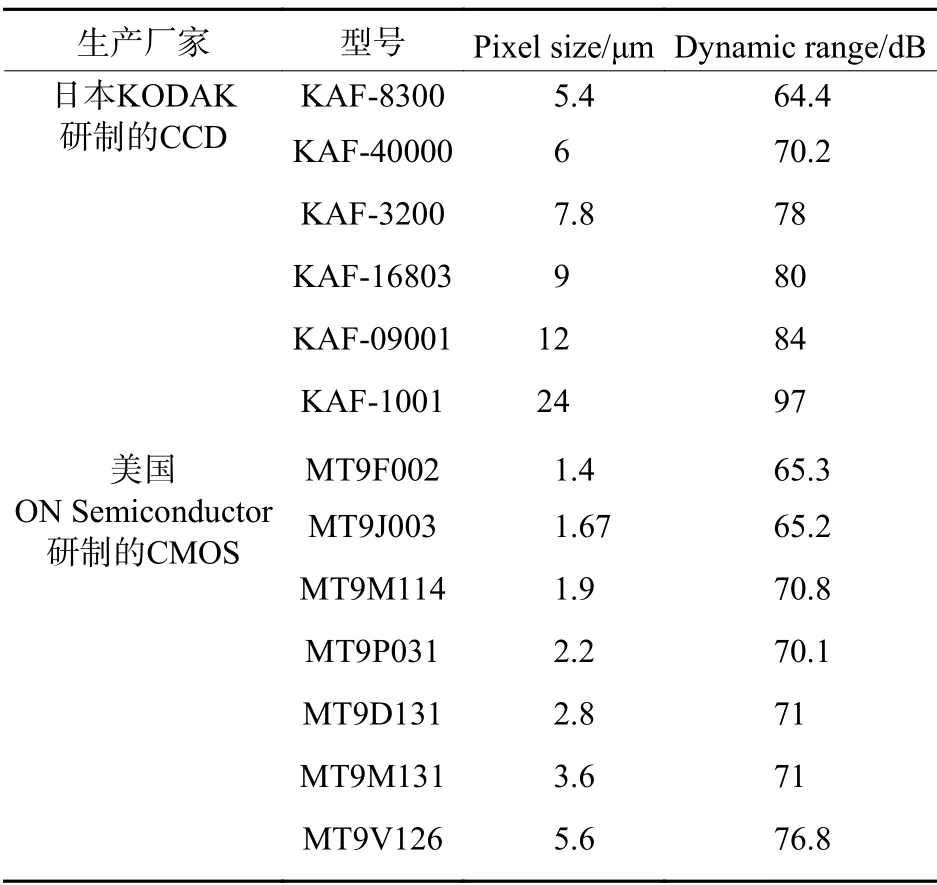
表 1 KODAK 和ON Semiconductor 公司生产的多类型CCD、CMOS 参数Table 1 Multi-type CCD and CMOS parameters produced by KODAK and ON Semiconductor
SNR 以分贝形式可表示为

公式(3)和公式(4)适用于电荷阱处于非饱和状态,即iph≤imax,imax表示最大非饱和输入电流,。图2 给出SNRdetector随像元尺寸的理论变化曲线。ON Semiconductor 公司生产的多个不同型号CMOS 性能参数如表2 所示。图2 也给出ON Semiconductor 公司的多个不同型号CMOS实测的信噪比与像元尺寸的变化关系。从图2 中可以看出,随着像元尺寸的增大,SNRdetector增加,目标成像对比度增强,有利于远距离目标探测和弱环境照度下目标成像。
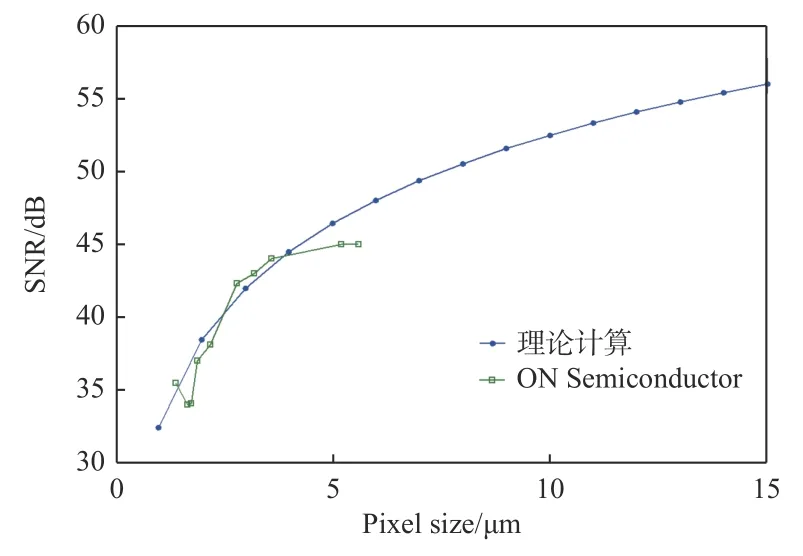
图 2 SNRdetector 随像元尺寸的变化关系Fig.2 Variation relationship of SNRdetector with pixel size
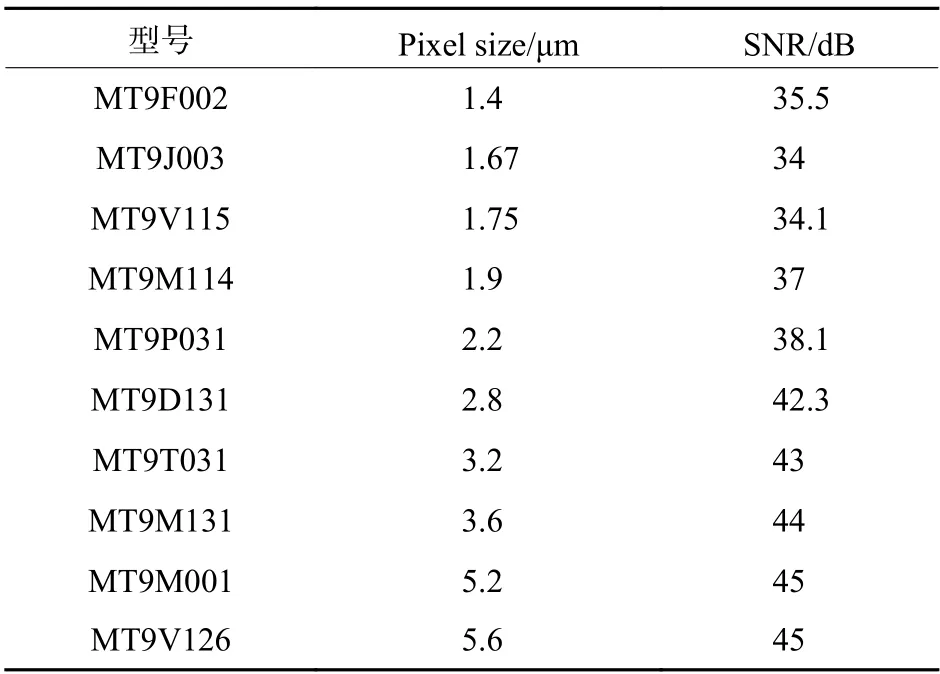
表 2 ON Semiconductor 公司生产的多型CMOS 参数Table 2 Multi-type CMOS parameters produced by ON Semiconductor
1.3 像元尺寸与探测器调制传递函数的关系
探测器调制传递函数(MTFdetector)定义为探测器输出调制度与输入调制度的比值。描述了探测器输出振幅对不同空间频率正弦波输入的响应,影响系统的成像对比度和对不同空间频率目标的分辨[9]。矩形探测器的二维空间响应调制传递函数如下式所示[5,10]:

式中:αH=dH/fl,αV=dV/fl;fH、fV分别表示水平方向和垂直方向的空间频率;αH、αV分别表示水平方向和垂直方向的像元张角;dH、dV分别表示水平方向和垂直方向像元尺寸;fl表示光学系统焦距。由于dH、dV可以不等,所以水平方向和垂直方向调制传递函数不一定相等,但二者数学模型一致。为简化分析,我们一般采用一维空间响应特性表征理想条件下的探测器传递函数MTFdetector-ideal,如下式所示:
式中:fx表示空间频率(cy/mrad);fDCO表示探测器截止频率;fDCO=fl/d(cy/mrad),d表示像元一维尺寸。将fx与fDCO同时除以焦距fl,将单位cy/mrad转换为cy/mm。图3 给出MTFdetector-ideal随像元尺寸的变化关系。图3 中尽管MTFdetector-idea适用空间频率从-∞~+∞,我们仅给出从0~fDCO的归一化空间频率响应特性。从图3 可以看出,随着像元尺寸的减小,相同空间频率下MTF 值增大,成像探测器对高空间频率的目标细节展现能力更强。当然,这需要良好的光学设计来实现更小像差的成像弥散斑,以避免光学系统对采集的物空间目标信息的损失[11]。

图 3 MTFdetector-ideal 随像元尺寸的变化关系Fig.3 Variation relationship of MTFdetector-ideal with pixel size
然而,实际成像探测器像元尺寸并不是越小越好。需要说明的是,随着波长的增加(一般为0.8 μm 以上),成像探测器电荷阱中产生的光电子会扩散至相邻阱中造成图像模糊和传递函数下降(这种情况在小像元探测器上尤为突出[12-13]),此时探测器传递函数变为MTFdetector-ideal×MTFdiffusion。MTFdiffusion为电荷扩散形成的扩散传递函数,其数学表达式[5]为
式中:α表示探测器基底材料的光谱吸收系数;LD表示探测器耗尽层宽度;Ldiff表示零空间频率处电荷扩散长度(一般情况下变化规律是随着像元尺寸增大而减小);L(fx)表示随空间频率变化的电荷扩散长度,表达式为

公式(7)适用于可见光和近红外波段。当工作波长小于0.6 μm 时,α很大,MTFdiffusion(fx)≈1;当工作波长大于0.8 μm 时,MTFdiffusion(fx)对于探测器传递函数的影响增大,成为影响探测器传递函数的主要因素[5,12-13]。图4 给出工作波长λ=0.8 μm 时,不同像元尺寸对应的MTFdiffusion曲线图。
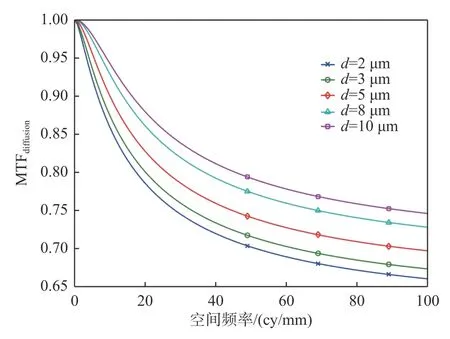
图 4 MTFdiffusion 随像元尺寸的变化关系Fig.4 Variation relationship of MTFdiffusion with pixel size
实际探测器的传递函数MTFdetector-actual=MTFdetector-ideal× MTFdetector-diffusion,图5 给出λ=0.8 μm时,MTFdetector-actual与像元尺寸的变化关系。从图5可以看出,像元尺寸的减小可以提升中高空间频率下探测器的传递函数值。由于探测器的制造缺陷、噪声以及光学系统的衍射极限等因素的限制,像元一直减小对成像带来的益处并不像理论预期的那样好,但受电荷扩散的影响,空间频率较低时,小像元探测器传递函数值达不到理想值那么高(当然,减小像元尺寸可以在一定尺寸的晶片上制造更多的探测像元,通过binning 方式提升光灵敏度,这也是大规模面阵探测器兼顾高分辨率和光灵敏度经常采取的措施[14])。上面分析了可见光和近红外波段,实际探测器传递函数与像元尺寸的关系,对于光电成像系统常用的短波、中波和长波红外波段,也有类似的结论,有兴趣的可以参考文献[15-18]。
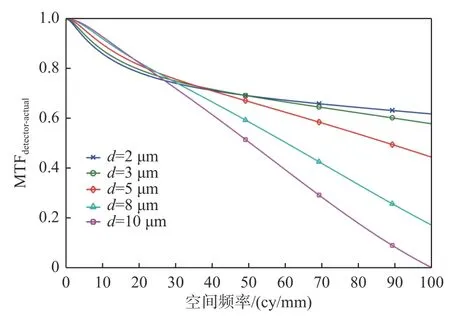
图 5 MTFdetector-actual 与像元尺寸的变化关系Fig.5 Variation relationship of MTFdetector-actual with pixel size
从上述分析可以看出,大像元探测器具备更高的信噪比和动态范围,小像元探测器对高空间频率信息具有更好的响应特性。实际上,结合探测器制造工艺等因素,国内外学者就最佳像元尺寸开展了一系列研究,有兴趣的可参考文献[6,8,11-14,19-20]。
2 探测器像元尺寸对光电系统性能的影响
反映光电系统性能的指标有很多,执行不同任务的光电系统,评价其性能的指标也有所不同。然而,不同光电系统都有几个共性评价指标,分别是系统分辨率、信噪比、作用距离(也称探测威力,包括对目标探测、识别和辨认距离)等。本节主要分析探测器像元尺寸对光电系统分辨率、信噪比、作用距离的影响。
2.1 探测器像元尺寸与光电系统分辨率的关系
从用户角度而言,不论是用于目标搜索、捕获、瞄准任务的评价标准-约翰逊判据,情报监视与侦察任务的评价标准-国家图像解译度分级标准(NIIRS)[1],还是驾驶与导航任务评价标准-源于红外成像系统性能模型NVThermIP 的TTP 判据[21]等都对系统分辨率提出了具体要求。对光电成像系统的设计制造者而言,不同专业使用不同的评价参数,例如:光学设计者使用Rayleigh判据、Sparrow 判据、艾利斑直径、模糊斑直径,探测器设计者使用探测像元数,光电系统总体设计者使用探测像元张角DAS、极限分辨率(系统MTF 为0.02~0.05 时对应的空间频率)、地面分辨力GRD 等[10]。但这些参数仅从各自角度评价系统某一方面的分辨能力,20 世纪50年代,Shade 发展了系统等价分辨率概念,综合了影响系统分辨能力的各个方面(包括光学、探测器、电子电路、随机运动和显示),经Sendal 完善,形成如下数学近似表达式:

需要说明的是,系统等价分辨率REQ-SYS仅为描述系统分辨率性能的数学量,无法直接测量。图6 给出了光学成像系统等价分辨率REQ-SYS与Fλ/d的关系曲线。从图6 可以看出,对于探测器受限系统(Fλ/d≤0.41),REQ-SYS趋向等于d;对于光学受限系统(Fλ/d≥1),REQ-SYS大于d,并随Fλ/d的增大而增大。因此,随着探测器像元尺寸的缩小,在光学焦距不变的情况下系统分辨率得以提升,这仅在系统探测器受限时成立。
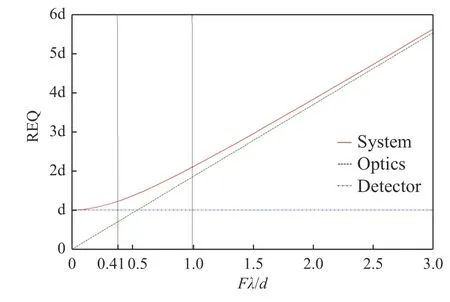
图 6 光学成像系统等价分辨率REQ-SYS 与Fλ/d 的关系曲线Fig.6 Relation curves between equivalent resolution REQ-SYS and Fλ/d of optical imaging system
2.2 探测器像元尺寸与系统信噪比的关系
从系统性能分辨率角度而言,希望系统分辨率越高越好,但是需要注意的是,影响系统分辨率的探测器像元尺寸、光学焦距和光学口径也同样影响系统信噪比。以采用凝视焦平面阵列探测器的红外成像系统为例,系统信噪比(SNRSYS)数学表达式[10]为
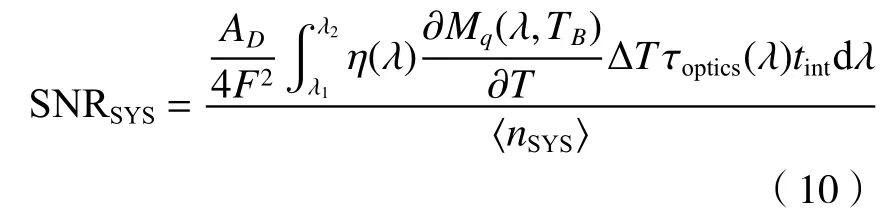
式中:AD表示探测器像元面积;F表示光学系统相对孔径;η(λ)表示量子效率;Mq(λ,TB)表示温度为TB的均匀背景的辐射出射度;ΔT表示目标/背景温差;τoptics表示光学透过率;tint表示积分时间;λ1、λ2表示响应工作波段的波长上下限;<nSYS>表示系统噪声,一般用探测器输出的等效电子数表示,其数学表达式为

式中:〈nshot〉表示散粒噪声;〈nFPN〉表示固定图案噪声;〈nMUX〉表示多路传输噪声;〈nADC〉表示量化噪声。对于采用CMOS 或CCD 面阵探测器的可见光/近红外成像系统,系统信噪比也有与(10)式类似的数学表达式[5]。
对于大多数航空光电成像系统所用的凝视焦平面阵列探测器而言,因为表示水平、垂直方向的像元尺寸dH=dV=d,因此,也可以这样说,SNRSYS与(d/F)2近似成正比[22]。
2.3 探测器像元尺寸与系统作用距离的关系
本文基于NVThermIP 红外成像系统性能模型(模型同样适用于可见光电视成像系统)给出的作用距离理论计算公式,分析像元尺寸与作用距离的关系,如下式所示[23-24]:

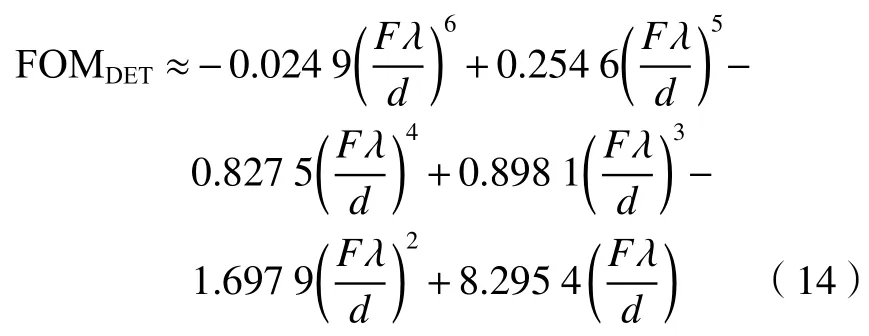
式中:hc=(AT)1/2表示二维目标特征尺寸;CR表示目标表观对比度,表示作用距离R条件下大气透过率,ΔT表示目标背景温差,SCNTMP表示场景对比度,一般为 ΔT的3~5 倍;V表示TTP 判据采用的空间分辨周期数;D表示光学入瞳直径;λ表示工作波长;FOM 表示品质因子(探测对应FOMDET,识别和辨认对应FOMREC-ID,二者有对应数学关系[10]。公式(12)理论分析未考虑噪声影响。对于高对比度目标,FOMDET数学表达式[21]为

式中:CTFEYE表示人眼对比度阈值函数(人眼的横向抑制效应使人眼对于中等空间频率目标的观察效果优于过低或过高空间频率目标,因此人眼对比度阈值函数具有空间频率带通响应特点);MTFOPTICS、MTFDETECTOR、MTFFP分别表示光学镜头、探测器、显示器调制传递函数。
公式(13)可近似为
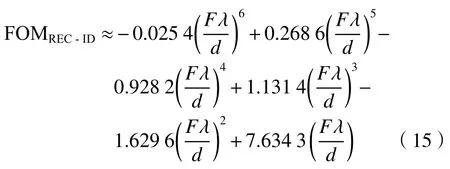
从公式(12)可知,系统作用距离与品质因子FOM 成正比,因此,FOM 也称为相对距离。图7给出了FOMREC-ID与的关系曲线。本文选择系统识别距离进行分析,从图7 可以看出,随着成像系统由探测器受限转变为光学受限,表征识别、辨认距离的品质因子逐渐增大(与探测品质因子FOMDET类似),且当时,FOMREC-ID趋于饱和[10]。图8 为基于上述理论给出的FOMREC-ID与探测器像元尺寸的关系。从图8 可以看出,在可见光、中波红外、长波红外等代表性成像波段,当(系统为探测器受限),随着像元尺寸的减小,FOMREC-ID逐步增大;当,随着像元尺寸减小,FOMREC-ID急剧增大;当(系统为光学受限),随着像元尺寸减小,FOMREC-ID趋于饱和。
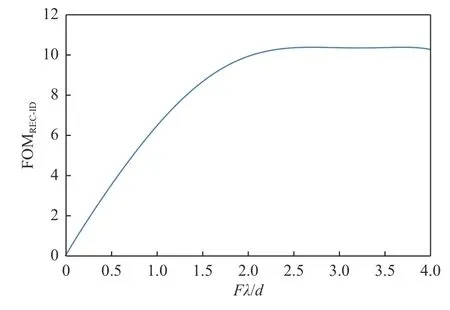
图 7 FOMREC-ID与Fλ/d 的关系曲线Fig.7 Relation curves between FOMREC-ID and Fλ/d
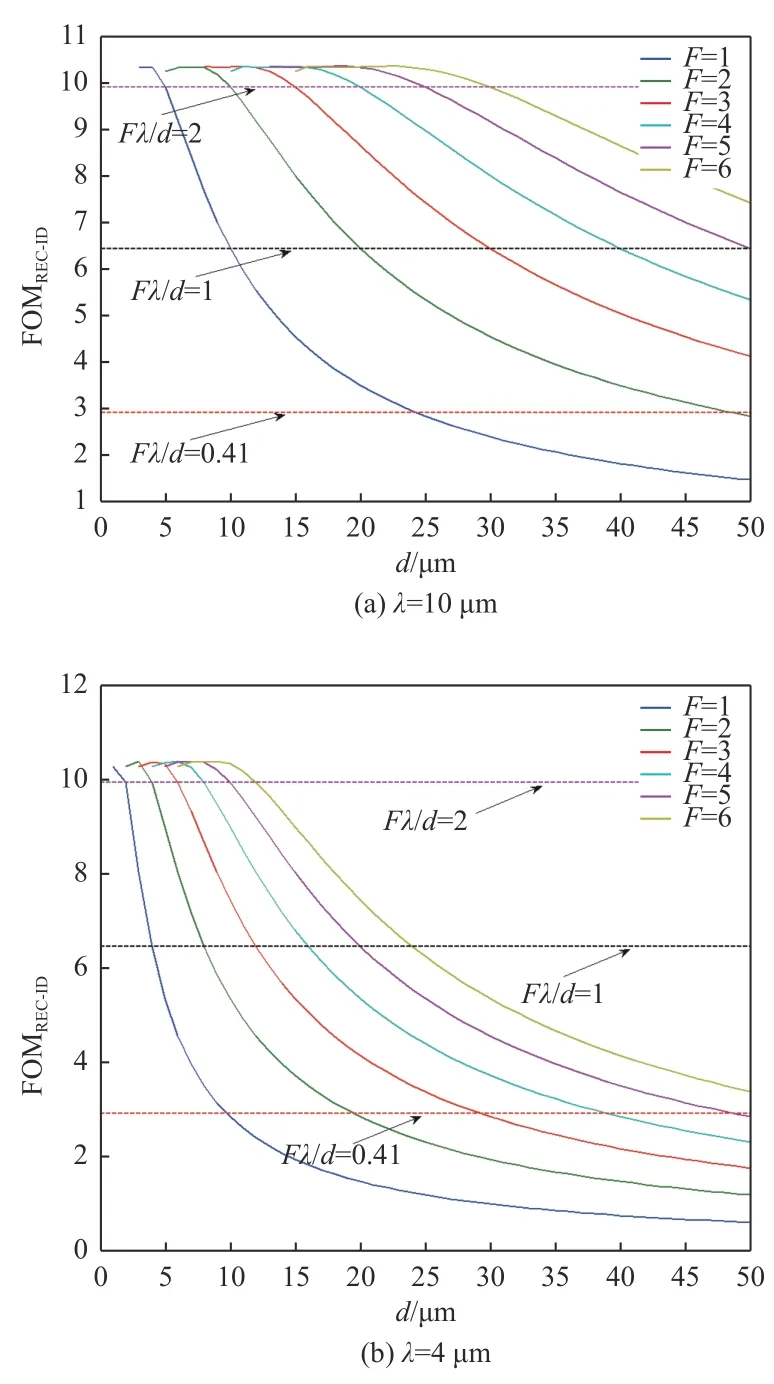
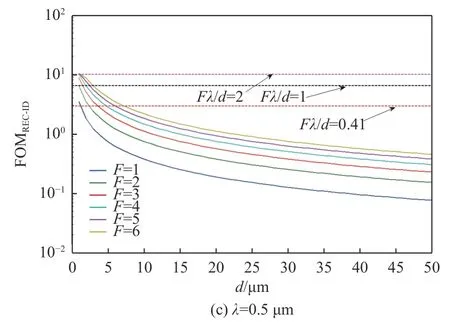
图 8 FOMREC-ID与d 的关系曲线Fig.8 Relation curves between FOMREC-ID and d
我们选取一个实例进行作用距离分析。实例中,光学入瞳直径分别为200 mm 和100 mm,平均工作波长4 μm,识别概率80%,目标尺寸6 m×3 m,大气衰减0.85/km,具体分析结果如图9 所示。图9(a)为系统作用距离R与的关系曲线,图9(b)为系统相对作用距离(也称为归一化距离)与的关系曲线。从图9(a)中可以看出,随着θ增大,即随着探测器像元尺寸减小,系统作用距离增加并趋于饱和;随着θ进一步增大,即随着探测器像元尺寸进一步减小,系统作用距离急剧下降;并且,光学入瞳口径对光学受限系统作用距离影响明显。从图9(b)中可以看出,系统相对作用距离随着θ的变化关系与作用距离随着θ的变化关系类似,但是其不受光学入瞳口径影响。
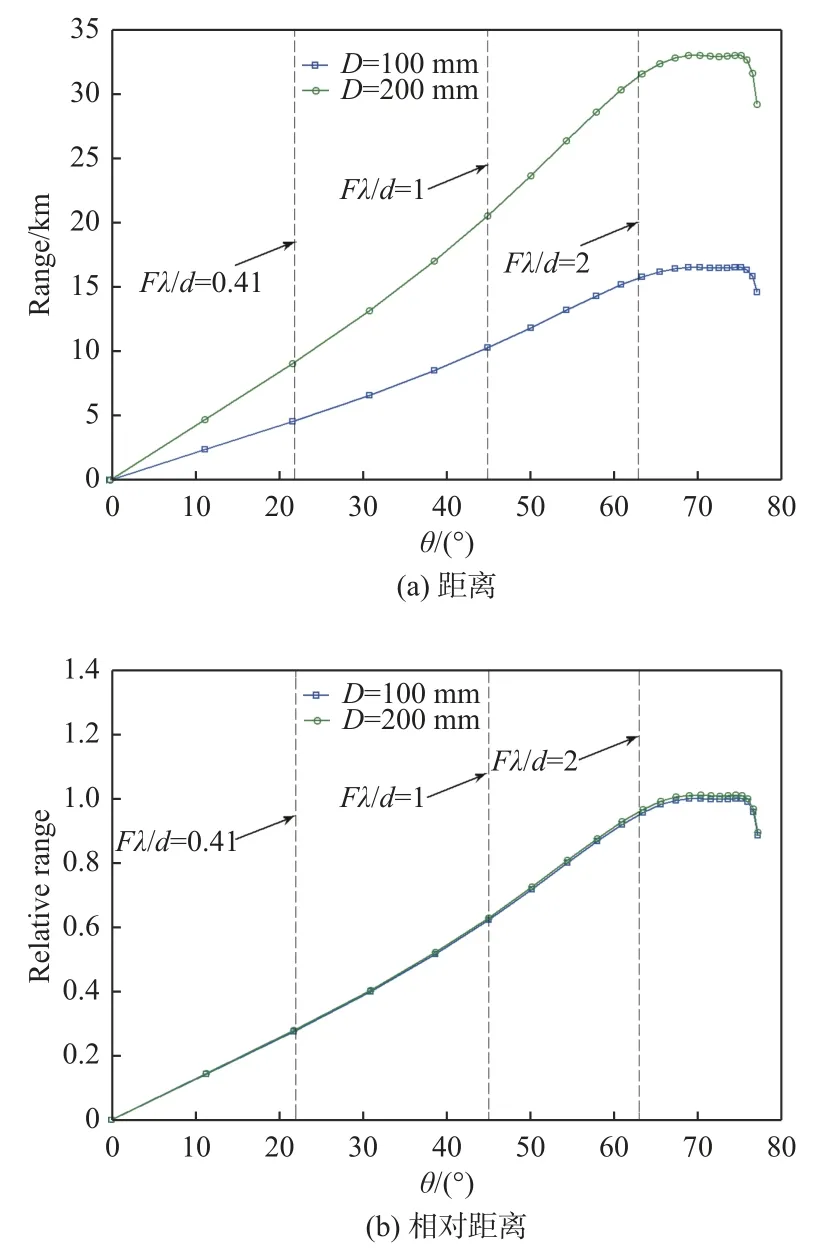
图 9 系统作用距离与θ 的关系曲线Fig.9 Relation curves between system operating range and θ
由于影响系统分辨率的探测器像元尺寸(本文分析均假设探测器填充因子100%)、工作波长、光学入瞳口径和光学焦距也影响系统信噪比,并且光电成像系统对目标的作用距离需要同时满足分辨率和信噪比的要求,因此在系统设计时,成像波段、光学焦距、光学入瞳口径和探测器像元之间需要根据系统属性(探测器受限或光学受限)进行权衡。上述参数对FOMREC-ID和作用距离的进一步影响分析,有兴趣者可以参考文献[19,21-23]。
由上述分析可知,随着Fλ/d的增加,系统作用距离逐步增大,但是当Fλ/d增加到一定程度,由于系统实际分辨率和信噪比降低,系统作用距离不升反降。另外,考虑到Fλ/d对系统调制传递函数的影响(即随着Fλ/d的增加,在空间频率小于系统奈奎斯特频率时,光学系统与探测器调制传递函数乘积MTFOPTICS×MTFDETECTOR减小,造成图像质量下降[19]),以及系统选用大像元探测器可提升系统信噪比和降低光学镜头制造复杂性等因素,为获得远距离高像质光电图像,目前大多数光电成像系统选用大像元探测器,并综合权衡探测器像元尺寸与系统Fλ/d之间的关系,将Fλ/d控制在2 以内。
3 国外典型航空光电系统
国外具有代表性的3 款航空成像系统主要参数如表3 所示。其中DB110 系统公开报道的作用距离(对于楼房等大型建筑物、舰船等目标的识别)不小于130 km[15];ERU 近红外成像对舰船的识别距离预计不小于100 km,中波红外成像对舰船的识别距离预计不小于90 km。另外,从表3 中也可以看出,国外典型航空光电系统选用大像元探测器,并综合权衡了探测器像元尺寸与系统Fλ/d之间的关系,将Fλ/d 控制在2 以内。

表 3 典型航空成像系统的主要参数Table 3 Main parameters of typical aerial imaging system
4 结论
虽然光电成像系统作用距离受光学参数(入瞳口径、焦距、MTF 等)、探测器、工作波段、大气传输、显示等多方面因素影响,但从本文分析可以看出,仅就探测器像元尺寸而言,为达到系统远程探测威力(同时具备足够分辨率和信噪比),选择大像元探测器是适宜的,并且需要对光电系统的Fλ/d值进行综合权衡。另外,选择大像元探测器,可以使系统具备更好的环境(如环境照度较低、能见度较低、目标反射率高引起的过曝等)适应能力。因此,大面阵小像元探测器依然是未来的发展趋势,因为使用小像元探测器不仅可以使系统能够对目标场景高频细节更好地呈现,并且有助于系统SWaP(small weight and power,小尺寸低功耗)的实现和降低批量制造成本。
