新型机载光电平台万向架及其关键技术
2022-09-13杜言鲁王明超李冰崖
程 刚,杜言鲁,齐 媛,王明超,宁 飞,李冰崖
(西安应用光学研究所,陕西 西安 710065)
引言
随着光学、光电子、精密机械、自动控制、信息处理等技术的发展,光电系统已广泛应用于成像探测、侦察监视、态势感知、对抗打击等军民应用领域。万向架平台作为光电系统装备的关键组成部分,为系统装备提供负载支撑、传感通道、运动稳定、环境防护等功能,同时实现扰动隔离、平台稳定、扫描机动等系统性能。为提升光电系统装备作用距离、成像分辨率等性能以及多任务、多功能集成实现,尤其在装备系统质量、包络构型等方面严格受限的情况下(如机载大范围侦察感知类光电系统装备),对光电万向架平台提出了更多、更高的要求,如集成更多的任务传感器、更多的系统参数配置、更高的扰动隔离性能、3 轴全维度稳定与运动补偿能力等,需要结合相关支撑技术设计研发技术体系创新、构型布局创新、性能创新的新型光电万向架平台。
1 机载光电平台万向架技术需求
随着高性能有人/无人的旋转翼、固定翼以及尾桨喷气式机载平台光电瞄准跟踪、侦察感知、压制对抗等装备技术的发展,要求在光电平台内集成的任务传感器日益增多,集成度日益增高,涉及多波段共光路望远单元、多视场成像传感器、照明/瞄准/指示单元、高精度航姿惯性单元等[1-3]。其技术发展趋势包括:多任务传感器集成、任务传感器性能更优、万向架平台稳定性能更高、像移运动补偿能力更强等,因此,对光电平台万向架提出了新的技术需求。
1)任务传感器集成与参数优化需求。
机载光电系统最基本的任务功能是接收目标辐射、反射的光谱信息,在全天候、宽光谱范围内实现对目标场景的远距离、高分辨率成像。这需要在光电万向架内集成可见光、红外、微光等被动式成像光电传感器,甚至需要集成测距机、照射器、指示器、跟踪器等主动式激光传感器,以增强系统任务执行能力。同时,为了使任务传感器作用距离更远、分辨率更高,需要光电传感器光学镜头焦距更长、入瞳口径更大,这些要求都会造成光电任务传感器负载构型包络增大,在载机平台总体边界约束一定的前提下,对光电万向架平台任务传感器布局空间提出了更高的需求。由于机载光电系统中传统框架式内万向架机构的存在,严重制约了光电万向架任务传感器布局空间占比,光电系统功能增强和性能提升受到限制。
2)3 轴高精度稳定需求。
目前,传统的机载光电万向架要达到优于10 μrad 的稳定精度,均采用了“万向环架+FSM”的粗精二级组合稳定技术,可以实现约5 μrad 的稳定精度。FSM 通常置于系统光路中,驱动光学反射元件直接操控光轴,受FSM 机构自身承载能力和性能要求的限制,传感器光学设计自由度-反射元件接收光线的一致性和入射口径等受到影响,导致光学设计难度增加。传统的机载光电万向架都属于两轴稳定,系统对由于环架运动耦合导致的第3 轴扰动无法克服,使得系统性能提升受限。例如,传统的方位/俯仰两环架光电系统由于缺少第3 个稳定轴,失稳造成“过顶”跟踪性能下降。另外,传统的机载光电万向架由于稳定环架中的轴承非线性摩擦、环架结构谐振特性限制,导致稳定环架伺服带宽受限,稳定性能难以进一步提升。传统机载光电万向架增加第3 个稳定环架会进一步压缩任务传感器集成和优化空间,同时给伺服稳定控制带来极大的挑战。
3)图像运动补偿需求。
高性能机载光电侦察系统都存在克服像旋运动,以及高质量成像过程中平台前向运动和扫描运动补偿需求。像旋运动对图像分析处理、图像视频观感均产生不利影响,平台前向运动和扫描运动导致光电探测器积分过程中探测器与目标区域的相对运动,进而降低系统成像质量。传统的FSM 扫描运动补偿同样会导致传感器光学单元设计难度增加,只有通过稳定万向架实现图像运动补偿是最佳选择。
2 机载光电万向架平台技术现状
机载光电万向架平台主要功能是:提供光电系统与装载平台的组合集成接口;为系统集成的光学单元和光电任务传感器负载提供支撑;为光电系统提供特定的光谱传输通道,确保场景与目标的反射、辐射光谱信号高效进入内部光学系统和任务传感器;提供相应的环架伺服机构以及自由度运动能力,实现光电系统任务负载按照特定的范围、速度进行运动调转、指向或者机动;通过减振装置实现对机载平台发动机、传动装置、旋转翼等振动进行高效隔离,进而实现环架自由度稳定;通过不同构型的密封壳体组合,实现光电系统在各种应用环境中对湿、热、盐雾、电磁等环境因素的物理防护[4-7]。
目前,机载光电万向架平台差异主要体现在环架配置和隔振形式上,按照环架配置和自由度主要分为两轴两环架和两轴多环架万向架平台,按照隔振形式可分为外置整体隔振和内置隔振万向架,各环架均采用齿轮副传动的伺服电机或者力矩电机驱动形式,环架轴系采用传统的滚动轴承支撑。两轴两环架通常为外置整体隔振,环架轴配置分别为方位/俯仰和横滚/俯仰万向架,比如以色列光电工业公司的Condor2 LOROP相机万向架平台,如图1 所示。两轴多环架万向架平台最典型的环架配置为方位/俯仰外环架与方位/俯仰内环架,在内外环架之间设置隔振装置,如图2(a)所示。也有内外环架之间采用刚性组合的,比如FLIR 公司的BRITE Star Block II 万向架,如图2(b)所示。
图 1 外置整体隔振两轴两环架万向架Fig.1 Dual-axis and dual-frame gimbal mount with external integral vibration isolation
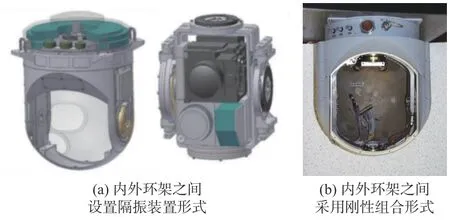
图 2 两轴多环架万向架Fig.2 Dual-axis and multi-frame gimbal mount
传统的机载光电平台万向架存在环架轴系非线性摩擦,万向架结构刚性对平台稳定性能限制,万向架结构带来的任务负载有效布局空间压缩等问题。针对光电系统更远距离的高清稳定成像,要求光电平台对传感器瞄准线的稳定精度优于10 μrad,甚至达到5 μrad 或者更高。目前基于传统万向架平台惯性速率反馈或者“粗精组合”的二级稳定精度难以满足要求,即使采用“粗精组合”的二级稳定需要在系统光路中设置二维快速反射镜机构,大大增加了系统光学设计和装调复杂程度。
3 国外机载光电万向架平台技术创新
目前,国内外机载光电万向架平台以两轴四环架万向架最为典型,这类光电万向架系统已广泛装备在多种型号的有人、无人航空平台上。随着技术的发展,也出现了许多新型机载光电万向架平台,其技术差别主要体现在内万向架上,包括轴系环架组合关系以及驱动支撑方式、振动隔离方式等方面。依据L3 PV Labs 公司Mike Lewis 的万向架代际划分[8],光电稳定万向架平台可以划分为5 代,如表1 所示。国外机载光电系统除采用第3 代万向架外,还研发设计了基于第4 代第5 代万向架的机载光电装备产品,以L3 Wescam 公司、L3 PV Labs 公司的新型万向架技术最为典型。其中,第4 代无约束驱动-主动随动万向架和第5 代并联式-主动随动万向架逐步突破了传统稳定万向架力矩直接驱动、环架结构构型/刚性约束、支撑轴承非线性摩擦等缺陷,实现了优于5 μrad 的稳定精度。

表 1 光电万向架平台代际划分Table 1 Generational classification of optoelectronic gimbal mount platform
3.1 无约束驱动-主动随动万向架
第4 代光电万向架平台技术特点主要包括:内外环架主动随动、被动隔离、内环架音圈电机驱动、有实际的物理环架轴系等[9-12]。相比第3 代光电万向架平台,第4 代优点有:分布式直线音圈电机驱动,充分利用光学舱内空间实现了驱动电机力矩最优化,同时结合中心万向轴系简化了内环架空间构型,为提升光电任务传感器布局空间创造了条件。这种实际存在物理轴系的万向架利于环架轴系位置传感器的配置和信息获取,例如美国Huges 公司发明专利Gimbal vibration isolation system,公布了基于万向球轴承的内万向架,结合空间位姿解算,实现了对万向架音圈电机输出和光电任务传感器瞄准线的稳定指向控制。这种万向架的不利因素包括:物理轴系或者万向机构中依然存在非线性结构摩擦扰动,影响系统伺服控制性能;物理轴系对光电任务传感器布局依然存在制约和限制,在系统舱内中心布局轴系会影响光电任务传感器或者光学镜头的最佳布局位置;边缘布局由于负载布局的非对称会影响内万向架平台的承载能力和稳定性;由于内外万向架轴系基准偏离,导致系统随动过程中光电任务传感器瞄准线位姿解算复杂。
L3 Wescam 公司发布的基于无约束驱动-主动随动万向架专利技术,研发形成的MX 系列装备产品,有25/25D、20/20D 以及15/15D,如图3 所示。通过沿俯仰轴两侧布置的弹簧阻尼被动隔离装载平台振动,内万向架采用中心枢轴支撑,采用4 个二维音圈电机驱动内万向架与光电任务负载,实现3 轴有限行程运动,采用电容式角度位置传感器获得内万向架各轴角度位置,采用偏心机构进行弹簧隔离器静态位移补偿,实现了传感器瞄准线优于5 μrad 的稳定精度。
3.2 并联式-主动随动万向架
并联式-主动随动万向架即第5 代万向架与以往的光电万向架平台有了根本的改变,主要表现为并联式内万向架、无物理内环架机构、主被动振动隔离方式等[13-15]。并联式内万向环架基于隔离器和驱动器相对运动部件的并联组合关系,可以有效利用光电系统舱内空间,避免环架与负载布局对空间最优位置的冲突,同时也简化了环架位置到瞄准线位置的转换关系。无物理内环架机构,通过一体式的隔离支撑机构以及线性音圈电机对任务负载的直接驱动来实现,大幅度节省了系统舱内空间,并消除了物理框架结构谐振对稳定环架伺服带宽的约束限制,以及传统轴承支撑结构中的非线性摩擦扰动。主被动复合振动隔离,充分结合了被动隔离方式对高频段区域的优异隔离性能,以及主动隔离方式对谐振频段区域的优异隔离性能。这种万向架平台可实现的稳定性能足以达到传统万向架与FSM 组合稳定性能精度,例如L3 PV Labs 公司的并联式-主动随动万向架以及相应的系统产品,如图4 所示。这种万向架平台技术同时对6 自由度柔性支撑隔离设计、二维线性音圈电机设计、无轴虚拟环架角度位置感知、3 轴6DOF 耦合控制等关键支撑技术提出了新要求。

图 4 L3 PVLabs 公司并联式-主动随动万向架Fig.4 Parallel-type active following gimbal mount by L3 PVLabs company
国外先进的第4 代和第5 代机载光电万向架平台特性如表2 所示。由表2 可知,采用了第5 代万向架技术的L3 PVLabs 产品在光电系统负载/万向架质量比大于0.5 的前提下,均实现了优于5 μrad 的稳定精度。这些新一代万向架平台具有明显的承载能力和稳定性能优势,对于国内先进机载光电装备研发具有借鉴意义。
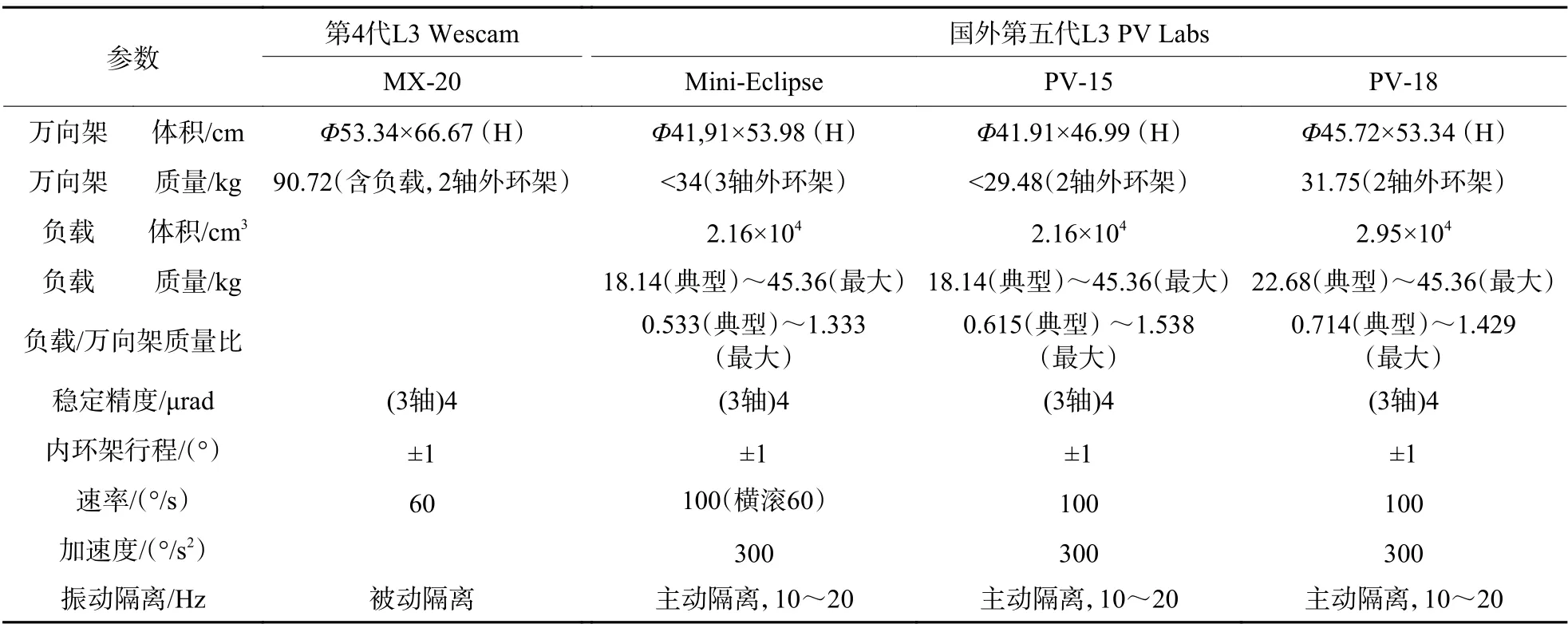
表 2 国外先进万向架平台性能对比Table 2 Performance comparison of foreign advanced gimbal mount platforms
4 新型机载光电万向架平台关键技术
国外新型的第4 代、第5 代机载光电万向架平台具有线性音圈电机驱动、弹性阵列主被动隔离等结构特点,另外还涉及到主动振动隔离、3 轴多自由度伺服控制等技术[16-21]。这些工程技术的实现与传统万向架技术有着显著差异,同时需要相应的关键器件技术支持,例如宽间隙高输出线性电机、非接触式相对位置传感器等。为了研发新型的光电万向架平台,需要开展以下关键技术攻关研究:
1)主被动扰动隔离技术
新型的并联式-主动随动万向架需对系统装载平台到外环架,进而再到内环架的宽频段扰动进行被动隔离,实现对光电任务负载的虚拟环架轴系支撑。支撑隔离装置需要同时实现外部扰动被动隔离和光电任务负载支撑,其设计特性与扰动主动隔离、电机驱动以及稳定控制等高度相关,需要开展支撑隔离装置运动学关系和驱动组合关系研究,以及主动振动控制方法研究。
2)宽间隙高输出线性电机
通过线性电机输出力远端布局,对负载产生力矩,实现万向架各轴向回转运动,同时通过电机输出控制产生“阻尼力”,实现振动主动隔离。这些多轴多自由度运动对驱动电机带来极大的挑战,即电机磁体与线圈运动平面法向的大间隙,会导致电机电磁耦合过程中严重漏磁,使输出力幅值和线性下降;通过提高线圈工作电流增大输出力,会造成线圈快速过热,影响其可靠性。
3)非接触式相对位置感知技术
第5 代并联式-主动随动万向架多轴环架工作过程中耦合了光电任务负载的平动、回转运动,为了实现内外环架之间的随动控制要求,实时感知内外环架间的角度位置,传统环架中定子/转子形式的旋转变压器、光电编码器、电容式角度位置传感器等无法实现这种平动,回转复合运动中角度位置传感,需要研发复合运动中单一传感角度运动的新型角度位置传感器。
4)6 自由度万向架MIMO 解耦控制
新型光电万向架平台采用3 轴3 回转自由度或者3 轴6 自由度运动,稳定控制涉及驱动电机参考空间到内环架参考空间的运动学转换,驱动电机到内环架参考空间的动力学转换,以及驱动电机单元运动自由度与内环架运动自由度之间的冗余、解耦等。此外,在工程实践中还需要考虑任务负载自身属性的质量不平衡、惯量耦合、支撑单元刚度非对称等因素影响,因此振动主动隔离以及内环架稳定、运动控制复杂度等大幅度提高。
5 结论
高性能机载光电装备发展对光电平台万向架提出更高的布局空间、运动控制和稳定性能要求,国外先进的第4 代、第5 代光电平台万向架在突破传统万向架性能的基础上采用新的技术体制,实现了更强的平台承载能力和平台稳定性能。为了国内机载光电装备产品性能提升,需要研究分析国内外新型光电万向架技术差异,持续不断地开拓研究新型光电万向架总体构型方案,对相关的关键支撑和集成验证技术进行攻关。
