巡飞弹目标定位精度分析
2022-09-13刘召庆贾兆辉文江华张兰兰
刘召庆,张 芳,朱 镭,贾兆辉,文江华,秦 川,张兰兰
(西安应用光学研究所,陕西 西安 710065)
引言
巡飞弹[1]是先进的小型无人机技术与精确制导弹药技术相融合的产物,可由多种武器平台发射或投放至目标区域,依靠携带的光电系统进行战场环境侦察,形成持续威慑能力,结合搭载的定位导航系统可将目标位置信息传至己方信息系统,用于战场环境感知及火力布局。不同于大型无人机,小型飞行器可搭载的光电系统图像传感器、测角器件、惯性导航器件及卫星定位器件等相关硬件精度和可采用的伺服框架结构是受限的。为提高巡飞弹光电系统目标定位能力,首先需要了解影响巡飞弹光电系统目标定位精度[2-5]的各项因素及其所占权重,在产品设计阶段做到有的放矢。目前,尚未查到国外关于巡飞弹目标定位技术的相关报道。国内中北大学采用视觉测姿和惯性测姿组合导航的方式来提升巡飞弹目标定位精度[6-12],北京理工大学针对巡飞平台指向角测量误差与跟踪角误差对定位精度[13-15]的影响进行了仿真分析,二者均属于理论分析阶段,且仅从个别影响因素进行了分析。本文在全面分析巡飞弹光电系统目标定位精度影响因素的基础上,还对各主要因素的影响程度进行了分析研究和试验验证。
1 目标定位原理
巡飞弹光电系统目标定位是指根据光电系统自身地理位置、目标与光电系统之间的距离,以及目标相对光电系统的方位角和俯仰角,解算出目标在空间大地坐标系下的经度、纬度和海拔高度。巡飞弹目标定位任务由巡飞弹载机、弹载光电系统和定位导航系统共同实现。弹载光电系统是巡飞弹实现对目标搜索、跟踪、观察、测量的重要手段,一般包含可见光相机、红外相机和激光测距机等光电传感器,三者安装在同一结构框架中,此框架可以在方位和俯仰方向自由转动,实现对目标可见光波段、红外波段的成像探测,并实时输出目标的距离、方位角和俯仰角,获取目标的相对位置信息。定位导航系统一般指卫星定位和惯性导航系统,其中卫星定位系统用于提供巡飞弹光电系统的实时地理位置坐标,惯性导航系统与光电系统固联,并随着巡飞弹载机位置和方向的变化实时更新光电系统姿态角。涉及到的坐标系定义如下:
1)载机机体坐标系(OA-XAYAZA)
载机机体坐标系为三维直角坐标系。坐标系的原点OA为载机质心;XA轴为载机右翼正向,向外为正;YA轴为载机纵轴机头正向;ZA轴通过右手螺旋定则确定,垂直XAYA平面朝向机身上方。
2)东北天坐标系(OG-XGYGZG)
东北天坐标系为三维直角坐标系。坐标系的原点OG为载机质心;XG轴指向正东;YG轴指向正北;ZG轴沿地垂线指向天空。
3)地心直角坐标系(Od-XdYdZd)
地心直角坐标系为三维直角坐标系。原点Od为参考椭球体中心;Zd轴与参考椭球体旋转轴重合,向上为正;Xd轴为格林尼治子午面与地球赤道平面的交线,向外为正;Yd轴在赤道平面内,并与Xd、Zd成右手直角坐标系。
4)相对直角坐标系(OR-XRYRZR)
相对直角坐标系是为了实现东北天坐标系到地心直角坐标系的转换,而自主定义的三维直角坐标系。其原点OR为载机质心在地球表面的投影;XR轴与Od-Xd平行且方向一致;YR轴与Od-Yd平行且方向一致;ZR轴与Od-Zd平行,且方向一致。
5)空间大地坐标系(WGS-84,LBH)
空间大地坐标系就是WGS-84 世界大地坐标系,是美国国防部于1984年定义,通过大地经度(L)、大地纬度(B)和大地高(H)来描述空间位置。经度是空间中的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角,纬度是空间的点与参考椭球面的法线与赤道面的夹角,大地高是空间点沿参考椭球的法线方向到参考椭球面的距离。
1.1 目标的瞄准线俯仰角、方位角和载机机体坐标系间转换
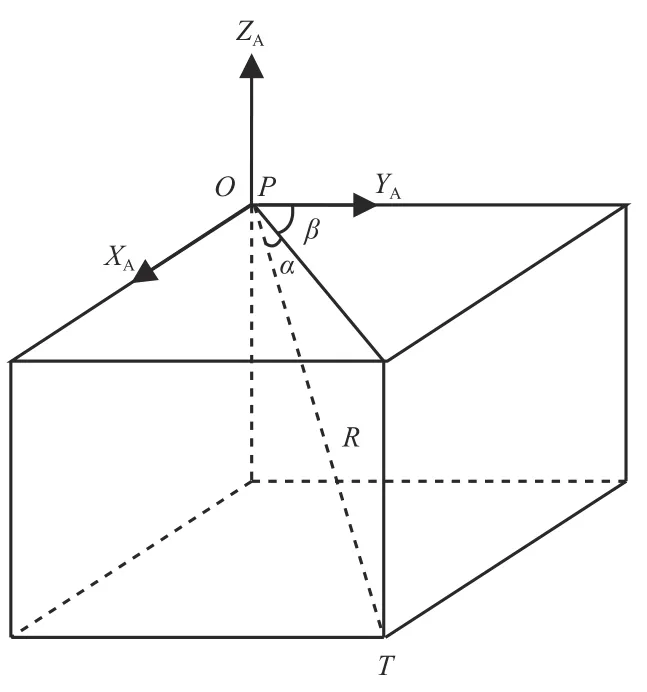
图 1 载机机体坐标系下目标和光电系统相对位置Fig.1 Relative position of target and electro-optical system in airborne coordinate system

如图1 所示,在载机机体坐标系OA-XAYAZA下,为光电系统所在位置地理坐标系,点P为光电系统质心,点T为目标质心。目标在载机机体坐标系下坐标为(1)式:式中:R为目标至光电系统距离;α为目标相对光电系统瞄准线零位的俯仰偏差角,向上为正,向下为负;β为目标相对光电系统瞄准线零位的方位偏差角,顺时针为正,逆时针为负。
1.2 载机机体坐标系和东北天坐标系间转换
载机机体坐标系到东北天坐标系间转换关系为

其中转换矩阵A为

式中:θ为载机真航向,载机机头与正北向的偏差,向东上为正,向西为负;ε为载机俯仰角,载机机头与正北向的偏差,向上为正,向下为负;γ为载机横滚角,机身与正北向的偏角,顺时针为正,逆时针为负。
1.3 东北天坐标系和相对直角坐标系间转换
东北天坐标系到相对直角坐标系间转换关系为

其中转换矩阵C为

式中:H、L、B为载机高度、经度和纬度。
1.4 相对直角坐标系和地心直角坐标系间转换
相对直角坐标系到地心直角坐标系间转换关系为

其中N为载机所在椭球卯酉圈曲率半径,计算式为

式中:a为地球椭球定义长半轴(取值6 378 137 m);b为短半轴(取值6 356 752 m);e1为第一偏心率;L、B为载机经度和纬度。
1.5 空间大地坐标系和地心直角坐标系间转换
地心直角坐标系向空间大地坐标系的转换关系为
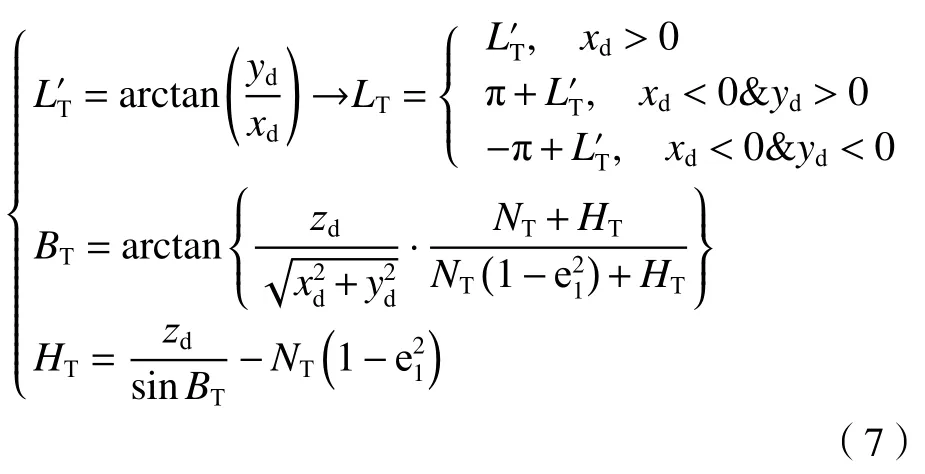
式中:LT、BT、HT分别为目标的经度、纬度和高度;NT为目标所在椭球卯酉圈曲率半径;e1为第一偏心率。
由上分析,已知目标相对光电系统瞄准线零位的俯仰及方位偏差角、目标相对光电系统距离、载机姿态和载机位置等信息,就可以通过不同坐标系之间的相互转换,得到目标在空间大地坐标系下的经纬高信息。
2 定位精度误差源权重分析
由目标定位原理可见,目标定位误差主要来自卫星定位系统测量巡飞弹载机经度/纬度/高度的误差、惯性导航系统测量巡飞弹姿态的误差、光电系统视轴稳定精度及测角精度(与目标相对光电系统瞄准线的方位角和俯仰角有关)带来的误差、测距机测量误差等随机误差。此外,还存在卫星定位系统、惯性导航系统和光电系统的安装误差,在结构刚性假设下,这三者是固有误差,可通过地面调校进行抑制。
为提高巡飞弹目标定位精度,需了解以上各随机误差源对最终目标定位精度的影响权重,并以此为依据确定各参数指标。其中,光电系统视轴稳定精度主要取决于光电系统内的伺服组件,不仅与传感器精度有关,而且与光电系统采用的框架结构和伺服算法有较高的相关度,在框架结构一定的前提下,认为光电系统视轴稳定精度为固定值,不再累述;目前,衡量目标定位精度的指标主要指的是目标的经度和纬度精度,因此暂且仅考虑卫星定位系统的经度和纬度误差的影响;惯性导航系统可以为巡飞弹提供弹体的航向、俯仰和横滚信息,对于一般的惯性导航货架产品,其航向精度均高于俯仰和横滚精度,在此仅分析惯性导航系统的航向精度对目标定位精度的影响。综上所述,本文仅分析卫星定位系统经度和纬度误差、惯性导航系统航向误差、光电系统测角误差和测距机测量误差对目标定位精度的影响。
依据GJB6289—2008 中的要求,采用目标定位的圆概率误差(CEP)来评价目标定位精度。CEP定义为以目标真实位置为圆心划一圆圈,若定位点位于圆圈内的概率为P,圆圈的半径为r,则称定位结果在P置信度下的CEP 半径为r米。
依据巡飞弹的工作特点及产品成本的约束,在保证巡飞弹其他性能指标的前提下,在典型工况下,给出卫星定位系统经度和纬度误差、惯性导航系统航向误差、测角误差和测距机测量误差的可变化范围,以90%概率的CEP 为目标定位精度的判定标准,分别分析CEP 对给定变化范围内的上述每个影响因素的灵敏程度,结果如图2~图5 所示。分析过程中,载机位置为经度109.558 380 9°,纬度40.873 653 7°,海拔高度1 282 m,载机姿态为航向90°,俯仰0°和横滚0°,光电系统方位0°,俯仰-5.7°,目标距离2 km。计算过程中,每次只更改一个误差源精度数值,其他参数数值不变。
图2 为卫星定位系统的水平(经度和纬度)定位误差对CEP 的影响,图3 为惯性导航系统航向误差对CEP 的影响,图4 为激光测距机测距误差对CEP 的影响,图5 为测角误差对CEP 的影响。图2~图5 显示的是单个参数误差引起的定位误差结果。
从图2 至图5 可见,惯性导航系统航向误差、卫星定位系统的水平定位误差、测距机测距误差、测角误差对CEP 的影响依次从大到小。由图2 可见,卫星定位系统的纬度定位误差对CEP 的影响大于经度定位误差对CEP 的影响。由图5 可见,光电系统的方位测角误差对CEP 的影响大于俯仰测角误差对CEP 的影响。
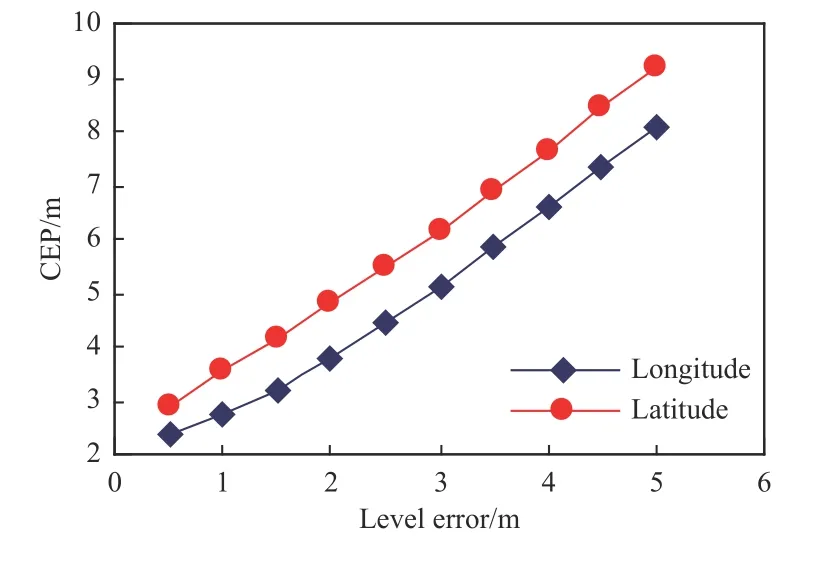
图 2 卫星定位系统的水平定位误差对CEP 的影响Fig.2 Influence of horizontal positioning error of global positioning system on CEP
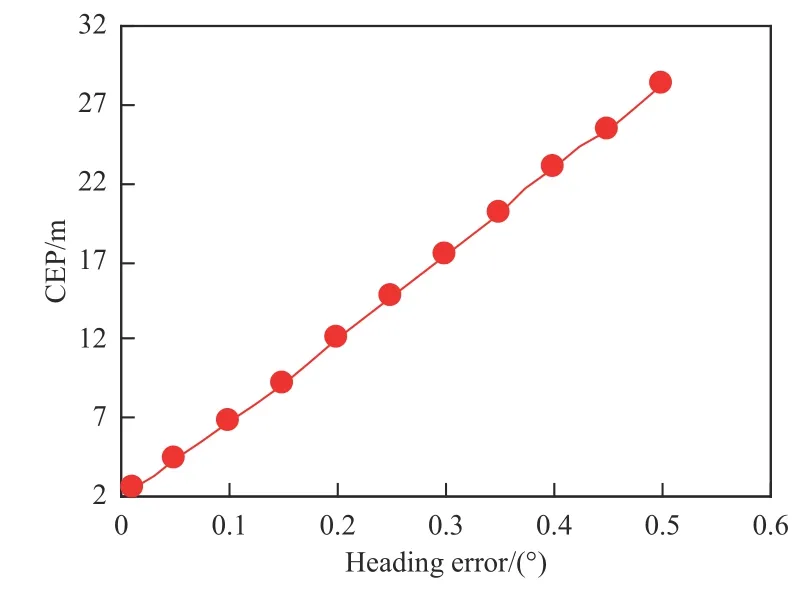
图 3 惯性导航系统航向误差对CEP 的影响Fig.3 Influence of course error of inertial navigation system on CEP
图 4 激光测距机对CEP 的影响Fig.4 Influence of rangefinder on CEP
图 5 测角误差对CEP 的影响Fig.5 Influence of angle measurement error on CEP
由以上分析可得,经济成本和结构体积允许的情况下,提高惯性导航系统航向精度和卫星定位系统的水平定位精度,更有助于目标定位精度的大幅提升。相较于经度定位精度,对于卫星定位模块和惯性导航模块构成的组合导航系统进行弹载平台位置解算时,应提高纬度定位精度。对于选择光电系统测角器件时,方位测角器的精度应高于俯仰测角器的精度。
3 试验验证
为验证上述分析结果,采用同样的方法,进一步深入分析卫星定位系统经度和纬度两个误差源对CEP 的影响,并通过外场挂飞试验加以验证。
测试条件:巡飞弹位置为经度109.558 380 9°,纬度40.873 653 7°,海拔高度1 282 m,航向90°,巡飞弹飞行平台俯仰和横滚0°,光电系统方位0°,俯仰-5.7°,目标距离2 km,目标经度109.588 776 2°,纬度40.873 650 15°。惯性导航系统航向误差、测角误差(方位和俯仰)和测距机测量误差如表1 所示。
当卫星定位系统经度和纬度误差为5 m 时,系统测试10 组定位数据,巡飞弹最终测得的目标经纬度及其与目标实际位置的误差值如表2 所示,依据GJB6289—2008,相应的CEP 为31.318 84 m。
当卫星定位系统经度和纬度误差为1 m 时,系统测试10 组定位数据,巡飞弹最终测得的目标经纬度,及其与目标实际位置的误差值如表3 所示,依据GJB6289—2008,相应的CEP 为21.465 4 m。
表 1 各参数误差引起的定位误差及权重分析Table 1 Positioning error and weight analysis caused by each parameter error

表 2 目标定位误差(卫星水平定位误差为5 m)Table 2 Target location error(satellite horizontal positioning error is 5 m)
表 3 目标定位误差(卫星水平定位误差为1 m)Table 3 Target location error(satellite horizontal positioning error is 1 m)
表1 分别计算了卫星定位系统经度和纬度误差、惯性导航系统航向误差、测角误差(方位和俯仰)和测距机测量误差等各单个参数误差引起的定位误差,同时,计算各参数误差引起的影响权重。表1 中给出的6 个误差源相互独立,CEP 一列的数据是每个误差源在给定精度范围内产生的CEP 值,影响权重是每个误差源对应的CEP 值与6 个误差源产生的CEP 值之和的比值。第3 列数据是卫星定位系统经度和纬度误差为5 m 时,每个误差源在给定精度下对应的影响权重,第4 列数据是卫星定位系统经度和纬度误差为1 m 时,每个误差源在给定精度下对应的影响权重。
其中,卫星定位系统经度和纬度误差选取5 m和1 m 两组数据。从表1 可以看出,卫星定位系统经度误差从5 m 降低到1 m 时,卫星定位系统经度误差对CEP 的影响权重从15.53%下降为6.63%;卫星定位系统纬度误差从5 m 降低到1 m 时,卫星定位系统纬度误差对CEP 的影响权重从17.47%下降为8.60%。也就是说,在其他条件都不变的前提下,当卫星定位系统经度和纬度误差从5 m 降低到1 m 时,地理定位误差将有接近50%的下降幅度。由表2 和表3 实际测试数据可见,卫星定位系统经度和纬度误差从5 m 降低到1 m 时,地理定位误差有接近31.5%的下降幅度。
4 结论
巡飞弹以其独特的工作特点和成本限制,需要弹载光电系统、卫星定位系统和惯性导航系统相互配合,才能更好地解决目标定位问题。在典型工况下,惯性导航系统航向误差、卫星定位系统的水平定位误差、测距机测距误差、测角误差对CEP 的影响依次从大到小,这对巡飞弹设计阶段各传感器选型至关重要。最后,固定其他误差源,仅改变卫星定位系统经度和纬度误差值,分别计算上述所有误差源对CEP 的影响权重,并进行外场挂飞试验加以验证。理论上,在其他条件都不变的前提下,当卫星定位系统经度和纬度误差从5 m降低到1 m 时,地理定位误差将有接近50%的下降幅度。试验结果,地理定位误差有接近31.5%的下降幅度,与理论结果基本吻合。本文将光电系统、卫星定位系统和惯性导航系统三者之间的安装偏差作为固有误差,并未对其一并分析,以及外场试验过程中的测量误差,是二者没有完全一致的主要原因。
