无人机光电设备对地目标单站无源定位方法
2022-09-13檀立刚骆明伟高晓利
檀立刚,骆明伟,李 捷,高晓利,王 维
(四川九洲电器集团有限责任公司 技术创新中心,四川 绵阳 621000)
引言
随着高新技术的快速发展及广泛应用,电子战在现代战争中的地位和作用不断提高,“制电磁权”很大程度上左右着战争的走向,成为决定战争胜败的关键因素。在现代电子战中,威胁目标辐射源的高精度定位成为一个重要的研究方向,是战场态势感知、灵巧压制干扰、精确引导打击的必要前提,而传统电子站往往由有源雷达主动探测系统承担目标定位任务,面临低空突防、电子干扰、隐身武器和反辐射导弹等威胁与挑战,有源雷达定位系统的生存受到严重威胁,定位难度逐步增加。因此,在现代电子战中,无源定位系统具有隐蔽侦察定位、抗干扰能力强、作用距离远、安全性高等特点,将逐步担任越来越多的重要作战任务[1-2]。
无源侦察定位系统设备不向被探测目标发射有源信号,仅利用接收的目标辐射源信号对目标进行侦察定位,典型装备包括无源雷达、光电系统、声呐和反辐射武器等。无源定位系统按观测平台数量划分为单站无源定位系统和多站无源定位系统,多站无源定位系统由于能够获得更多的观测信息量而受到广泛关注和应用,能够保证一定的定位精度,但其明显缺点在于各站之间时间同步与空间校准难、通信带宽受限和数据交互频繁,系统复杂度比较高,一定程度上降低了其实用性和时效性[3-8];单站定位系统仅利用单个观测平台获得的量测信息实现目标定位,可有效规避时间同步、空间校准、站间通信和多站协同等问题。因此,单站定位系统具有灵活性强、机动性好、成本低、响应快等优点,已经成为国内外研究的热点,引起了广泛关注[9-13]。
单站无源定位技术的核心是无源定位算法,即如何利用有限的观测信息获取目标位置信息,尽可能提高定位精度。现有的单站无源定位技术依据可用观测信息类别可划分为仅测向定位技术和联合定位技术体制。仅测向定位往往需要平台机动,通过测量不同位置上辐射源的来波方向,利用自身与目标渐进相对运动或者相对位置关系来实现目标定位,具有设备简单、成本低、距离远、计算快、应用广等优点,但存在定位精度差、定位时间长等缺点,无法满足近实时目标定位需求;联合定位通常利用多接收通道获取到达时间差(TDOA)、多普勒频差(FDOA)、相位变化率(PRC)等信息,将角度信息、频率信息、到达时间差、角度变化率信息等多种观测量联合起来确定目标的位置[13-18]。从根本上讲,联合定位的基础仍是测向定位,只是在测向基础上增加其他观测信息而已。因此,单站测向无源定位已成为通信、雷达、光电、声呐、地震学和天文学等诸多领域的一个基本问题,具有重要的研究价值,相关文献也较多。在机载光电成像领域,白冠冰等人[19]利用无人机光电侦察吊舱实现了对地多目标定位,但其借助了激光测距的距离信息和数字高程模型的高度信息;张赫等人[20]和周前飞等人[21]研究了基于激光测距的机载光电成像系统目标定位和多目标自主定位,均利用了激光测距信息;郝振兴等人[22]构建了基于机载红外搜索跟踪系统(IRST)在红外探测与追踪情况下的双机被动定位模型,使用了双站红外观测信息;侯建民等[23]研究了基于相位差变化率的空中运动单站对地面固定目标的无源定位,联合了相位差变化率;吴卫华等[24]利用相位差及其变化率、多普勒变化率等无源观测量实现了机载运动单站对辐射源的绝对定位,基于不敏变换的滤波算法提高目标定位精度,但引入了相位差变化率、多普勒变化率以及不敏卡尔曼滤波算法。
综上所述,现有机载光电侦察的单站目标定位算法大多用到了激光测距信息,严格意义上讲不属于单站无源定位范畴,而单站测向无源定位方法分为两类:一类是利用时间积累在不同观测位置获取目标的观测从而实现目标无源定位,为等效多站无源定位的衍生;另一类是利用了多个接收机的时差或含距离信息的相位变化率、多普勒频移变化率等估计目标距离从而实现目标无源定位,为联合定位技术的拓展。本文以无人机光电设备对地目标侦察定位为场景,研究在无激光测距信息条件下的单站无源定位方法,构建无人机平台为起点指向地面目标的空间射线方程和虚拟椭球方程,求解空间射线与虚拟椭球的交点获取目标的位置信息,借助无线电高度仪的高度信息引入地形起伏估计目标高度从而确定目标绝对位置。该方法仅利用单站测向信息达到对地目标近实时无源定位的目的,可适用于大多数测角设备单站无源定位场景,如电子对抗侦察(ESM)、红外光电、声呐和IRST 等,但定位精度受限于测向精度。
1 单站无源定位原理
1.1 单站无源定位问题分析
在三维空间定位场景下,由于目标绝对位置参数有3 个,对于任何定位体制而言,实现目标定位至少需要3 个定位观测方程,不同定位体制的目标侦察定位所需要的最少观测站数量[1]见表1。
对于三角定位,当观测站具有二维测向功能时,每个观测站可以获得2 个定位方程,而单站无源定位则需借助参考面补齐第3 个定位方程。对于相位差变化率定位,单站无源定位要求观测站必须具有二维测向功能,获得2 个观测方程,而相位差变化率方程作为一个独立观测方程,可以满足三维空间定位所需的最少3 个定位观测方程要求。因此,在三维空间定位场景下,单站定位实现的充分必要条件为具备3 个独立的观测方程,通常具备测向功能可获得2 个观测方程,测距功能获得1 个距离观测方程,这也正是大多数单站定位实现的技术体制。而单站无源定位是指探测系统本身不主动发射信号,通过单个测量站来对目标辐射源的辐射信号进行截获、测量以获得目标的位置和轨迹,定位平台的高精度无源测角功能往往是具备的,测距功能一般由雷达或激光等有源手段实现,单站无源定位要求观测信息均为无源方式获取,因此,单站无源定位中目标与平台之间距离的无源估计便成为单站无源定位的关键,即如何实现高精度近实时无源测距,但关于无源测距理论和方法的报道很少。
无人机作为承载平台往往载荷负载能力有限,不可能装配过多任务载荷,而光电侦察设备因集成度高、重量低和测量精度高等优点,在无人机对地侦察领域扮演着重要的角色。虽然无人机光电侦察设备往往集成有激光测距机,可以获得激光测距信息,但无人机飞行过程中的机械振动与气流扰动、目标尺寸及其表面反射率、无人机与目标之间实际距离和激光信号大气衰减等因素经常造成激光测距信息的缺失或不连续,导致单站目标定位的无法实现或不连续,这也正是本文开展单站无源定位方法研究的目的,即在无目标距离信息条件下如何利用角度信息实现近实时单站无源定位,获取目标的绝对位置信息(经度、纬度和高度)。无人机光电侦察设备对地目标侦察如图1所示。
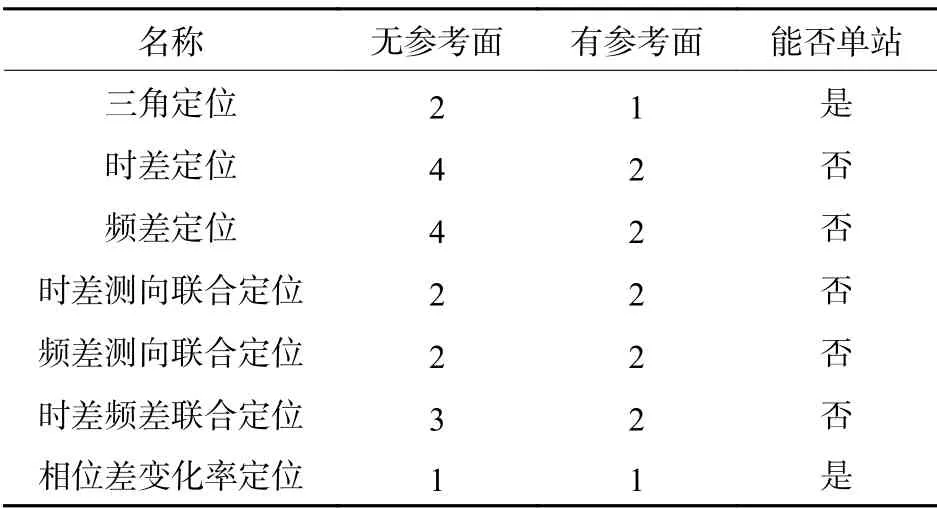
表 1 不同定位体制最少观测站数量Table 1 Minimum number of observation stations by different positioning systems

图 1 无人机光电侦察设备对地目标侦察示意图Fig.1 Schematic diagram of ground target reconnaissance by UAV photoelectric reconnaissance equipment
无人机光电侦察过程中,在触发激光测距前需对目标实施跟踪,实时锁定目标并随动跟踪获取目标的测向信息,处于跟踪状态下的每个时刻,目标始终位于光学图像的中心位置,即光电侦察设备与目标的连线方向(视轴方向),在笛卡尔坐标系下可以确定一条以光电侦察设备为起点、沿视轴方向的空间射线,在不考虑测角误差时,目标位于该空间射线上,绝对位置满足空间射线方程。目标位于地面上,绝对位置满足地球椭球模型。因此,一条确定的空间射线若与目标所在地球椭球面(虚拟椭球)相交,则交点即为目标位置,单站无源定位问题即转换为空间射线与虚拟椭球交点的求解问题。空间射线与虚拟椭球交汇如图2 所示,O为无人机所在位置,T为目标位置。
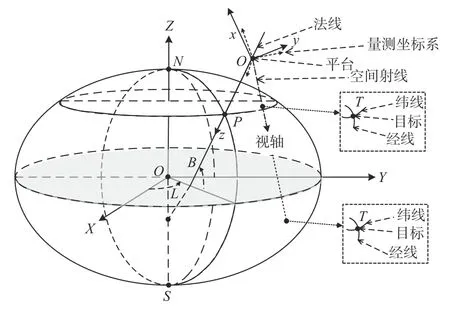
图 2 空间射线与虚拟椭球交汇示意图Fig.2 Schematic diagram of intersection of space rays and virtual ellipsoid
1.2 基于虚拟椭球的单站无源定位建模与解算
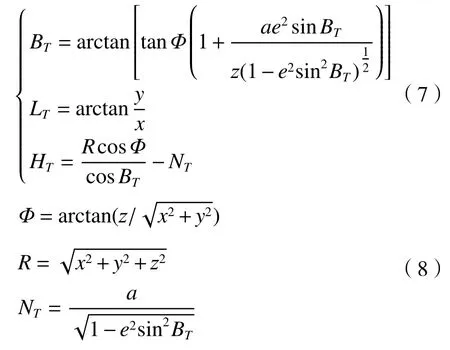
在空间大地直角坐标系中,设某一时刻无人机平台的坐标为(X,Y,Z),目标的坐标为(x,y,z),目标相对于平台的方位角为 α,俯仰角为 β,则平台与目标构成的空间射线方程为

目标位于虚拟椭球上,满足地球椭球方程,从大地坐标系到大地直角坐标的转换公式为
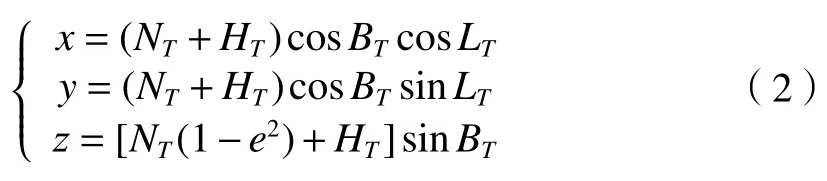
以椭球方程形式表示为

式中:NT为目标所在位置卯酉圈曲率半径;HT为目标海拔高度。卯酉圈曲率半径及测量直角坐标系如图3 所示。
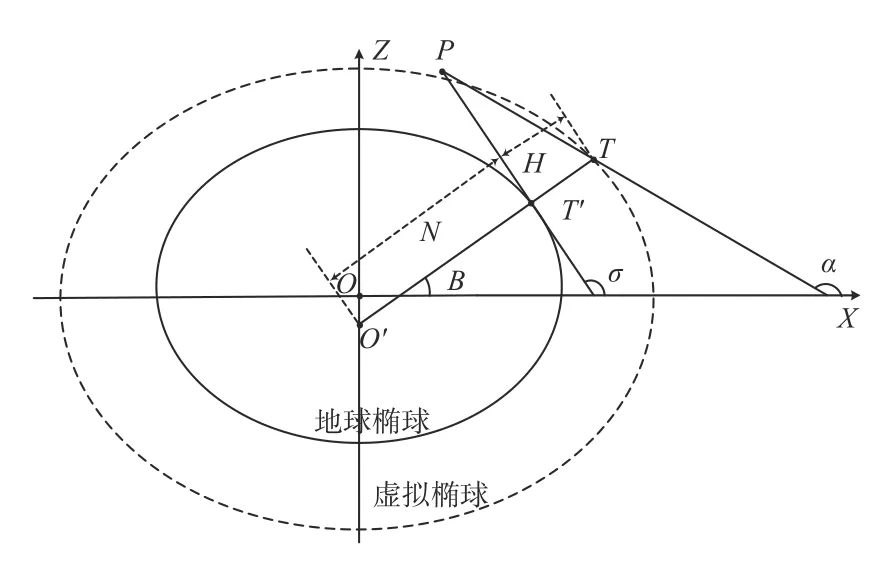
图 3 卯酉圈曲率半径及测量直角坐标系示意图Fig.3 Schematic of curvature radius of prime vertical and measuring rectangular coordinate system
当目标海拔高度HT为0 时,海平面的地球椭球方程为

式中:a为地球椭球长轴半径;b为地球椭球短轴半径。地面目标位于地球表面上,满足地球椭球方程,但卯酉圈曲率半径与纬度相关,直接求解将引入未知的纬度BT,无法精确求解,这里进行了一个近似,即使用a代替N:

联立(1)式和(5)式,并求解平台与目标构成的空间射线与虚拟椭球的交点即可获得目标的位置(x,y,z)。
单站无源定位的定位解算在空间大地直角坐标系中进行,利用齐次坐标转换方法将目标在量测坐标系中的坐标转换到空间大地直角坐标系中的坐标,坐标转换过程这里不再赘述[25],值得注意的是(1)式中的方位角和俯仰角并非光电设备直接量测角,而是空间大地直角坐标系中的等效方位角和等效俯仰角,根据直角坐标系和极坐标转换关系可求解等效方位角α和等效俯仰角β:

求取目标大地直角坐标(x,y,z)后,将其代入反算公式(7)式和(8)式,即可求得目标的大地坐标值(BT,LT,HT)。
1.3 对地面目标单站无源定位流程设计
单站无源定位因无法使用激光距离信息,只能引入间接包含距离信息的量测方程。为保证飞行安全,无人机平台往往安装有无线电高度计,可实时获取无人机平台与地貌相对高度,利用无人机平台GPS 接收机的海拔高度信息可以计算无人机所处位置在竖直向下方向投影的地表位置海拔高度,而光电侦察设备作用距离范围一般不大,且地面目标位于地球椭球上,在一定区域范围内地形起伏不大,目标所处虚拟椭球可由无人机平台所处地貌环境初步构建。对地面目标单站无源定位算法流程如图4 所示。
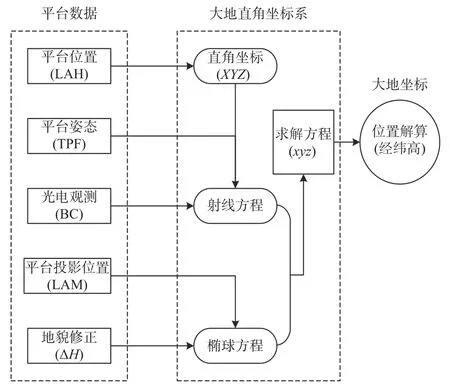
图 4 对地目标单站无源定位流程图Fig.4 Flow chart of single-station passive location for ground target
步骤1)利用无人机GPS 数据(经纬高)解算平台在空间大地直角坐标系下坐标,作为空间射线的起点。
步骤2)利用无人机姿态数据(偏航横滚俯仰)、目标量测角(方位俯仰)计算在空间大地直角坐标系下目标相对于无人机的等效方位角和俯仰角,构建空间射线方程。这里将光电设备和无人机视为同一质点,暂不考虑由装配引起的位置与观测误差,这部分误差可由系统误差标定来校正。
步骤3)根据无人机海拔高度信息和无线电高度计测高信息计算其所处位置的地面海拔高度,并结合地面的地形地貌环境估计目标高度,以无人机所处位置竖直下视方向与地表交互点的地面海拔高度作为参考高度,不同地形高度估计设置为:平原[50,200] m、丘陵[200,500] m、山地[500,1 000] m、高原[1 000,1 500] m、高山[1 500,2 000] m,构建目标位置虚拟椭球方程。
步骤4)联立并求解空间射线与虚拟椭球方程组,计算目标在空间大地直角坐标系下坐标。
步骤5)将空间大地直角坐标系下坐标转换为目标的大地坐标(经纬高)。
2 仿真试验及数据分析
2.1 仿真试验数据与误差分析
无人机光电侦察设备对地面目标单站无源定位使用的参数包括无人机位置、无人机姿态、光电设备测角和无线电高度计测高等信息,无线电高度计用于获取无人机平台与所处位置地貌的相对高度。地面静止目标单站无源定位仿真试验数据见表3。

表 3 对地面目标单站无源定位仿真试验数据Table 3 Simulation test data of single-station passive location for ground target
采用蒙特卡洛方法对目标定位误差进行统计分析[26-30],各参数的误差分布情况见表4。
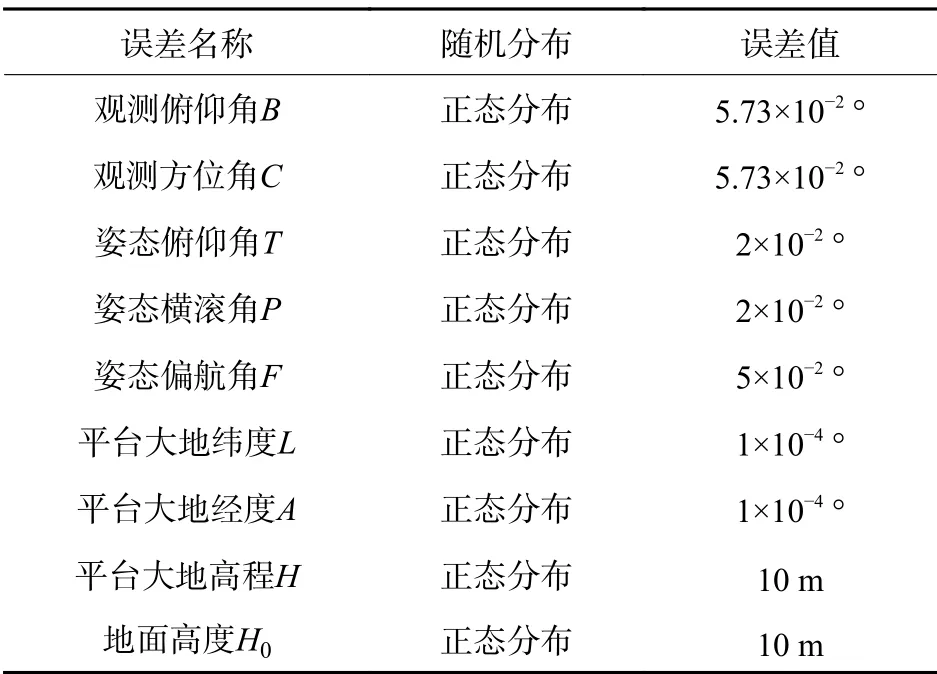
表 4 各参数误差分布Table 4 Error distribution of each parameter
地面目标的高度随地形地貌的不同会有所起伏,目标所处地形地貌在无人机光电侦察设备作用范围内不会明显变化,因此,在误差分析时,目标高度估计误差依据地形地貌分类进行设置,不同地形地貌的目标高度估计误差见表5。
利用蒙特卡洛方法进行10 000 次单站无源定位计算后,分别对目标的位置误差、纬度误差、经度误差和高程误差进行分析,得到各自的误差分布、统计分布、累积分布和置信分布,如图5~图8所示。

式中:Ed,Eb,El,Eh分别代表位置误差、纬度误差、经度误差和高程误差;(x,y,z)为定位参数存在误差时目标在空间大地直角坐标系下的坐标;(X0,Y0,Z0)为定位参数不存在误差时目标在空间大地直角坐标系下的坐标;(b,l,h)为定位参数存在误差时目标在大地坐标系下的坐标;(b0,l0,h0)为定位参数不存在误差时目标在大地坐标系下的坐标。
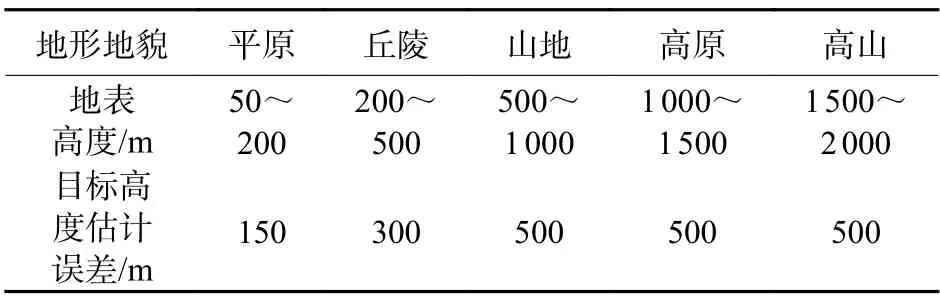
表 5 不同地形地貌的目标高度估计误差Table 5 Target altitude estimation error in different landforms
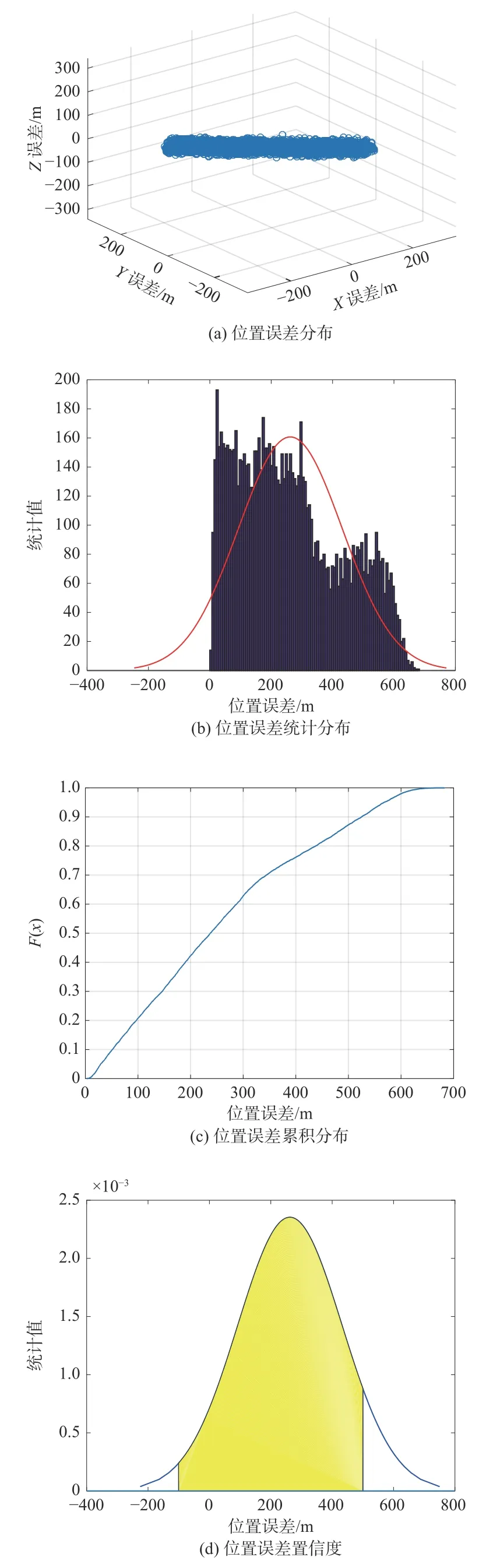
图 5 位置误差Fig.5 Diagram of position errors
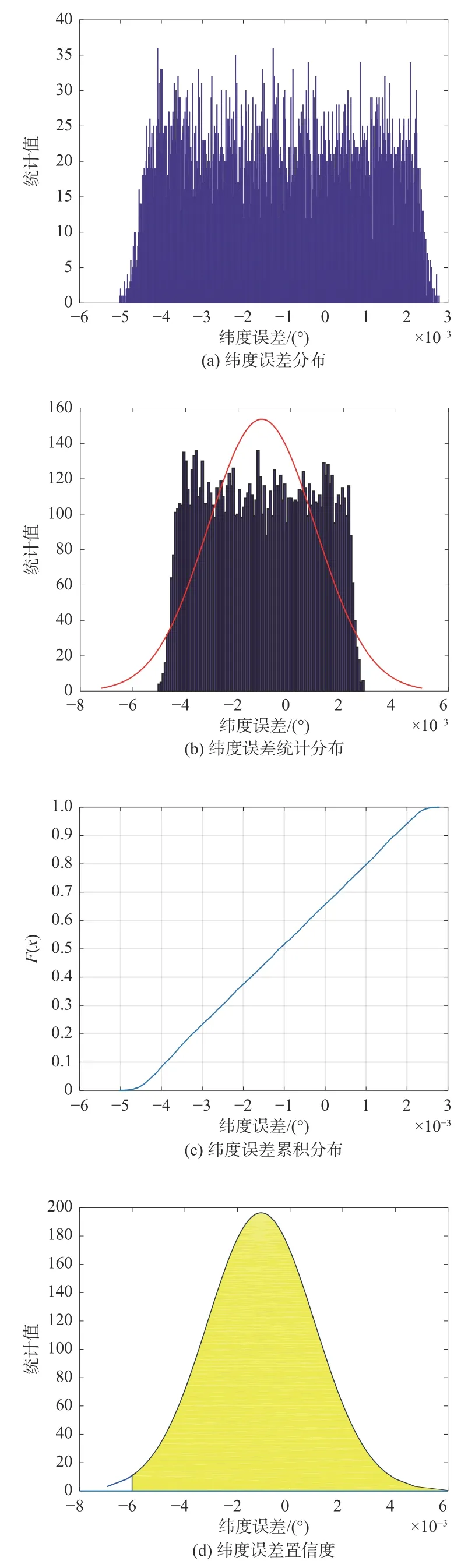
图 6 纬度误差Fig.6 Diagram of latitude errors

图 7 经度误差Fig.7 Diagram of longitude errors

图 8 高程误差Fig.8 Diagram of altitude errors
在目标高度估计误差在500 m 内,经仿真计算后,目标定位结果:经度114.415 81°,纬度36.895 66°,高度2711.34 m。目标定位误差:位置误差均值262.30 m,标准差169.52 m,在[-100,500] m 区间置信度0.903 2;纬度误差均值-1.10×10-3°,标准差2.03×10-3°,在[-6,6]×10-3°区间置信度0.991 9;经度误差均值-3.72×10-3°,标准差6.13×10-3°,在[-2,2]×10-3°区间置信度0.996 0;高程误差均值78.12 m,标准差为146.45 m,在[-300,300] m 区间置信度0.930 2。
若以无源定位精度%R 进行评估,无源定位误差低于10%R 的概率为0.771 0,无源定位误差低于7%的概率为0.536 6,如图9 所示。
2.2 方位角和俯仰角对定位误差影响分析
因单站无源定位受目标与平台之间实际位置关系影响很大,目标距离越远,高度差越小,光电设备观测俯仰角越小,则高度估计误差和俯仰角误差对目标定位精度的影响越大,因此,在不同方位角和不同俯仰角下单站无源定位的定位误差不同,某些角度下方位角和俯仰角对定位影响严重,定位结果不可靠。
在方位角不变的情况下,俯仰角从[-110,20]°范围内变化,单站无源定位误差均值和标准差分布如图10 所示。

图 9 无源定位精度Fig.9 Diagram of passive positioning accuracy
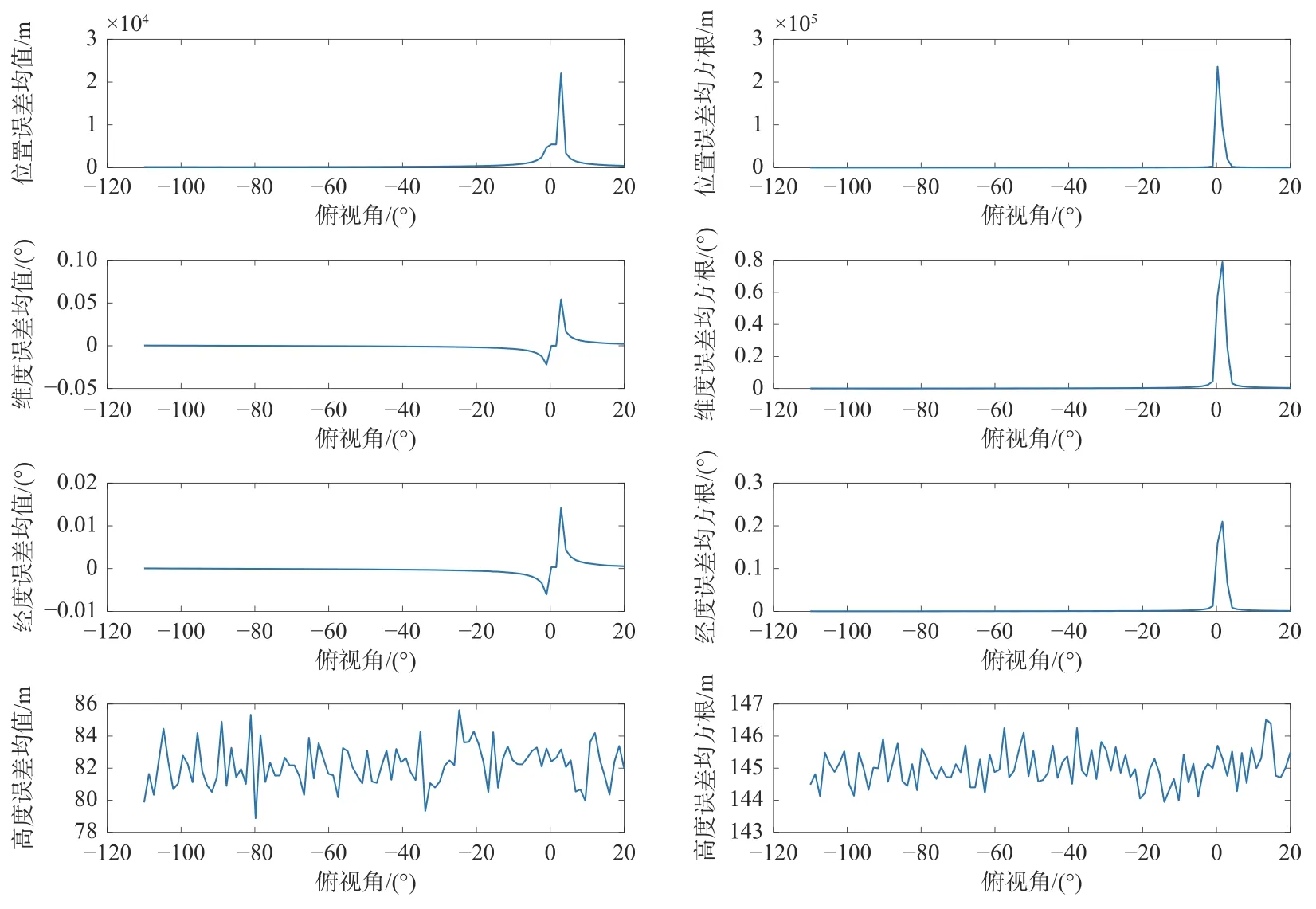
图 10 方位角不变,不同俯仰角下位置误差、纬度误差、经度误差和高程误差的均值和标准差Fig.10 With azimuth angle unchanged,mean values and standard deviations of position errors,latitude errors,longitude errors and altitude errors under different pitch angles
当在方位角不变的情况下,俯仰角从[-110,20]°范围内变化时,位置、纬度和经度的误差均值在俯仰角为-10.94°附近开始快速增加,标准差在接近-1.45°附近急剧增加,高度的误差均值和标准差变化不大,分别在100 m 和150 m 以内。虽然本文以对地目标定位为场景,俯仰角基本不会出现正值,这里之所以对俯仰角从[-110,20]°范围内变化进行全局仿真分析,主要是出于覆盖无人机光电设备正常工作时观测能力范围以及后续对空单站无源定位拓展的考虑,若可获得空中目标的高度估计,无源定位算法仍然适用。
在俯仰角不变的情况下,方位角从[-180,180]°范围内变化,单站无源定位误差均值和标准差分布如图11 所示。
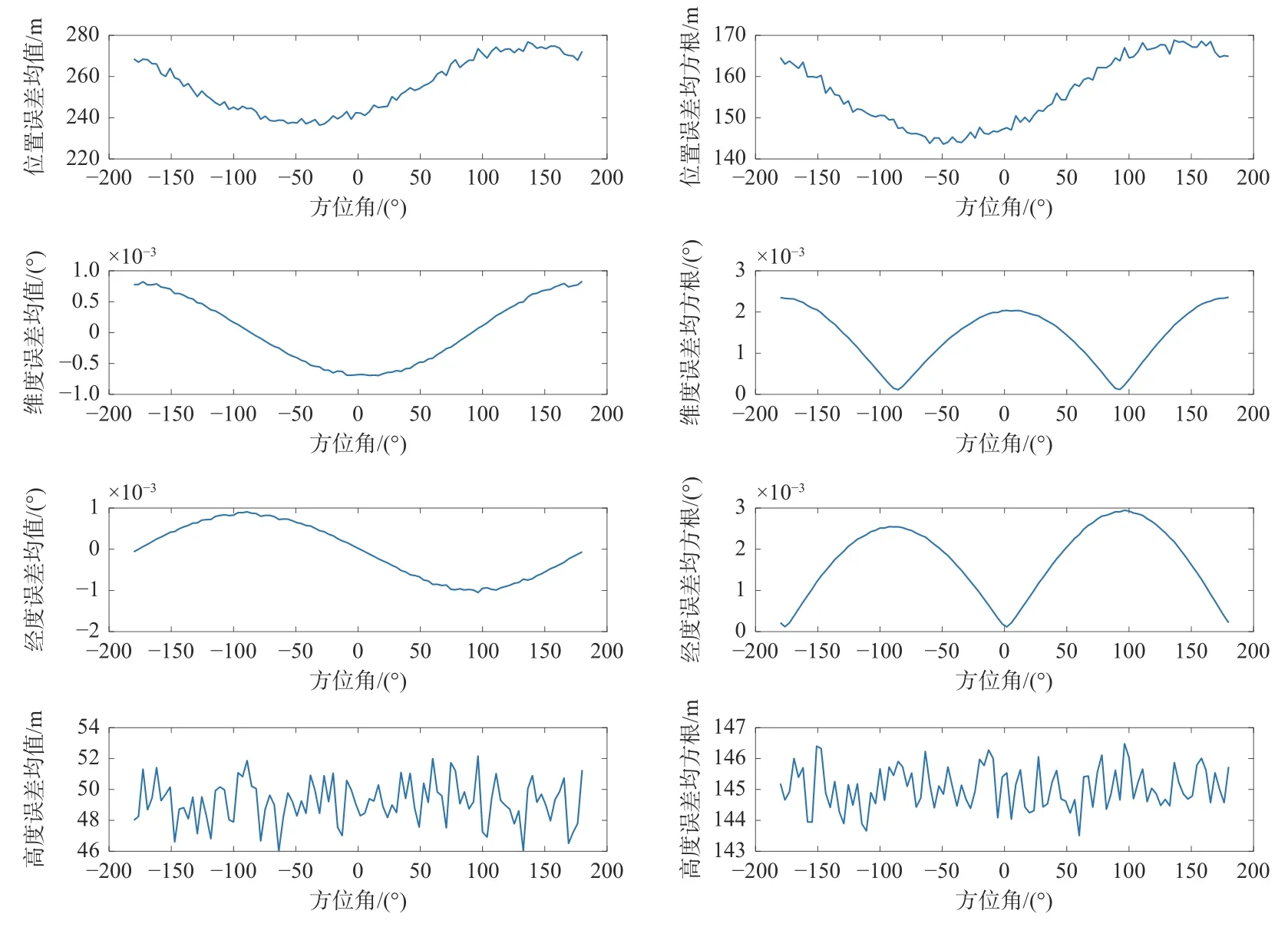
图 11 俯仰角不变,不同方位角下位置误差、纬度误差、经度误差和高程误差的均值和标准差Fig.11 With pitch angle unchanged,mean values and standard deviations of position errors,latitude errors,longitude errors and altitude errors under different azimuth angles
在俯仰角不变的情况下,方位角从[-180,180]°范围内变化,位置误差均值和误差标准差分布在(230,280)区间内类余弦分布,在-50°和150°附近出现最小值和最大值;纬度误差均值在(-1,1)×10-3°区间内,在0°和180°附近出现极值;经度误差均值在(-1,1)×10-3°区间内,在-90°和90°附近出现极值,高度的误差均值和标准差变化不大,分别在60 m 和150 m 以内。
图10 和图11 中定位误差出现极值是由于单站无源定位解算方程中的两个角度量测方程由方位角和俯仰角的三角函数确定,在等效方位角接近0°和180°,纬度误差较大,在接近-90°和90°时,经度误差较大;在等效俯仰角接近0°时,定位误差会快速增加,导致定位不准确,在单站无源定位时应予以考虑。等效方位角和等效俯仰角受无人机平台位置、姿态和观测角信息共同决定,高度误差由目标高度估计误差影响。
2.3 单站无源定位应用建议
在无人机光电设备对地目标侦察定位场景实际应用中,平台位置、平台姿态角、目标观测角和气压高度等定位参数均实时获取,各参数误差对单站无源定位均会造成影响,为尽可能确保单站无源定位的可用性并提高单站无源定位精度,给出相应的结论与建议。
1)观测方位角和观测俯仰角对单站无源定位影响较大,观测误差在不同方位角和不同俯仰角下对无源定位影响程度有所不同,一般认为,在可以有效定位时,当方位角和俯仰角的绝对值越大时,观测误差对定位结果影响较小;
2)平台俯仰角和横滚角对单站无源定位影响较小,在无人机平稳飞行状态下,其角度范围约±3°内,但其参与到等效方位角和等效俯仰角的确定过程中,建议侦察定位在平稳飞行状态下进行,可认为其对定位误差影响不大;
3)等效方位角接近π/2的整数倍时,定位误差达到极值,而等效俯仰角接近0°时,单站无源定位性能下降,定位误差快速增加,在执行单站无源定位任务时,应尽量确保等效方位角远离π/2的整数倍,建议观测方位角位于(-180,-10)°和(10,170)°范围内,等效俯仰角远离0°,建议观测俯仰角位于(-110,-10)°和(10,20)°范围内;
4)在目标高度估计误差在500 m 内,单站无源定位的绝对定位精度为经纬度误差在10-3°量级,高度误差在200 m 内,无源定位精度优于10%R的置信度高于50%;
5)建议在成本允许条件下采用高精度姿态测量设备,在可接受时间范围内多次定位滤波提升单站无源定位精度。
3 结论
本文针对无人机光电设备对地侦察定位场景,提出了一种无人机光电侦察设备对地面目标单站无源定位方法,建立了基于虚拟椭球的单站无源定位模型,可应用于无激光距离信息条件下对地面目标实时单站无源三维目标定位。仿真试验表明,在目标高度估计误差在500 m 内时,基于虚拟椭球参考面的单站无源定位方法的经纬度定位精度在10-3°量级,高度定位精度在百米量级,并可实现置信度高于50%定位精度优于10%R的单站无源,满足大多数实际应用场合的无源定位精度要求,可实现运动目标的近实时初步定位,为目标跟踪提供目标初始位置估计,还可运动多站无源定位、多平台协同定位、多平台间互引导以及目标精确打击和快速搜索等提供一定帮助。
