柔性铰链结构特性对快速反射镜性能影响分析
2022-09-13姜世洲杜言鲁王惠林王明超巩全成徐飞飞
姜世洲,杜言鲁,王惠林,王明超,巩全成,徐飞飞
(西安应用光学研究所,陕西 西安 710065)
引言
快速反射镜(fast steering mirror,FSM)具有体积小、带宽高、位置精度高等优点,通常与大惯量惯性稳定平台构成复合轴系统,实现大转角、高精度的光轴指向和稳定[1-2]。国外相关单位,如美国Ball Aerospace & Technologies、Left Hand Design、Newport 等从20 世纪80年代开始FSM 方面的研究,并成功应用于激光通信、激光武器、自适应光学、像移补偿等高精度光轴稳定指向领域。国内国防科技大学、北京航空航天大学、西安应用光学研究所以及中国科学院等单位在相关领域的研究也取得了丰硕的成果[3-6]。
目前FSM 的设计大多基于传统的机电系统设计方法,通常结构分析和控制系统设计单独展开。文献[7]针对快速反射镜挠性支承开展了运动学设计分析,文献[8-11]开展了基于有限元分析的柔性铰链结构特性分析,文献[12]提出了一种基于多目标优化的柔性铰链结构特性优化方法,文献[13-17]对FSM 控制系统进行仿真与控制算法优化,文献[18-19]中同时对FSM 的结构特性和控制系统进行了研究,但也是单独展开,未开展结构特性和伺服控制系统共同作用下FSM 性能分析。文献[20]通过动力学分析,建立了包含结构特性(工作轴转动刚度)的控制系统仿真模型,但未能分析柔性铰链非工作轴刚度特性对FSM 性能的影响。
本文通过将柔性铰链简化为弹性环节,充分考虑其在各自由度方向上的结构特性,将其等效为3 个轴向的平动刚度和绕3 个轴的转动刚度,根据FSM 的工作原理,推导出FSM 的动力学理论模型,搭建了包含结构特性和控制系统的综合仿真模型。在特定振动环境下开展结构特性对FSM 锁零精度等性能方面的影响分析,并通过仿真结果与实际振动试验结果对比,验证了该仿真模型的正确性,可用于指导FSM 设计。
1 FSM 组成及工作原理
FSM 主要由反射镜、支撑结构、基座、驱动元件、角度测量传感器和驱动控制系统组成。以两轴四驱动结构形式的FSM 为例,如图1 所示。从图1 可看出,支撑结构、音圈电机磁钢以及角度传感器安装在基座上;支撑结构与反射镜连接,允许其绕两轴转动,限制其3 个平动自由度和1 个转动自由度;音圈电机通过推拉,使反射镜产生两轴的角度旋转,角度传感器测量反射镜的旋转角度,并反馈给驱动控制系统,形成闭环控制。柔性铰链可由1 块材料一次加工成形,无需装配,具有体积小、结构紧凑、零摩擦、零间隙、定位精度高、响应快等优点,被广泛用于FSM 支撑结构[21]。柔性铰链的形式多种多样,本文中采用的柔性铰链结构形式为直圆型,如图2 所示。

图 1 两轴FSM 结构Fig.1 Structure diagram of two-axis FSM

图 2 柔性铰链结构形式Fig.2 Structural form of flexure hinge
2 FSM 理论建模
2.1 FSM 动力学模型
柔性铰链作为FSM 的支撑结构,虽然结构形式多样,但只是起到为反射镜运动分配各个方向自由度的作用。对两轴结构形式的FSM,其允许绕2 个工作轴转动,限制了3 个轴的平动自由度和1 个非工作轴的转动,如图3 所示。从图3 可看出,反射镜负载通过柔性铰链与基座相连,定义惯性坐标系为o-xyz,其中o为柔性铰链的转动中心,在图3(a)中z轴 垂直于纸面向里,在图3(b)中x轴垂直于纸面向外。定义反射镜基座固联坐标系oi-xiyizi和反射镜负载固联坐标系oo-xoyozo,在静态时o-xyz、oi-xiyizi和oo-xoyozo这3 个坐标系重合。将柔性铰链简化为弹性环节,等效为3 个轴平动刚度kx、ky、kz和绕3 个轴的转动刚度kα、kβ、kγ,对应各自由度方向的结构阻尼系数分别为cx、cy、cz、cα、cβ和cγ。图3 中V1~V4 为音圈电机,在x轴方向的跨距为 2a,在y轴方向的跨距为 2b;S1~S4为电涡流传感器,在x轴方向的跨距为 2rx,在y轴方向的跨距为 2ry。
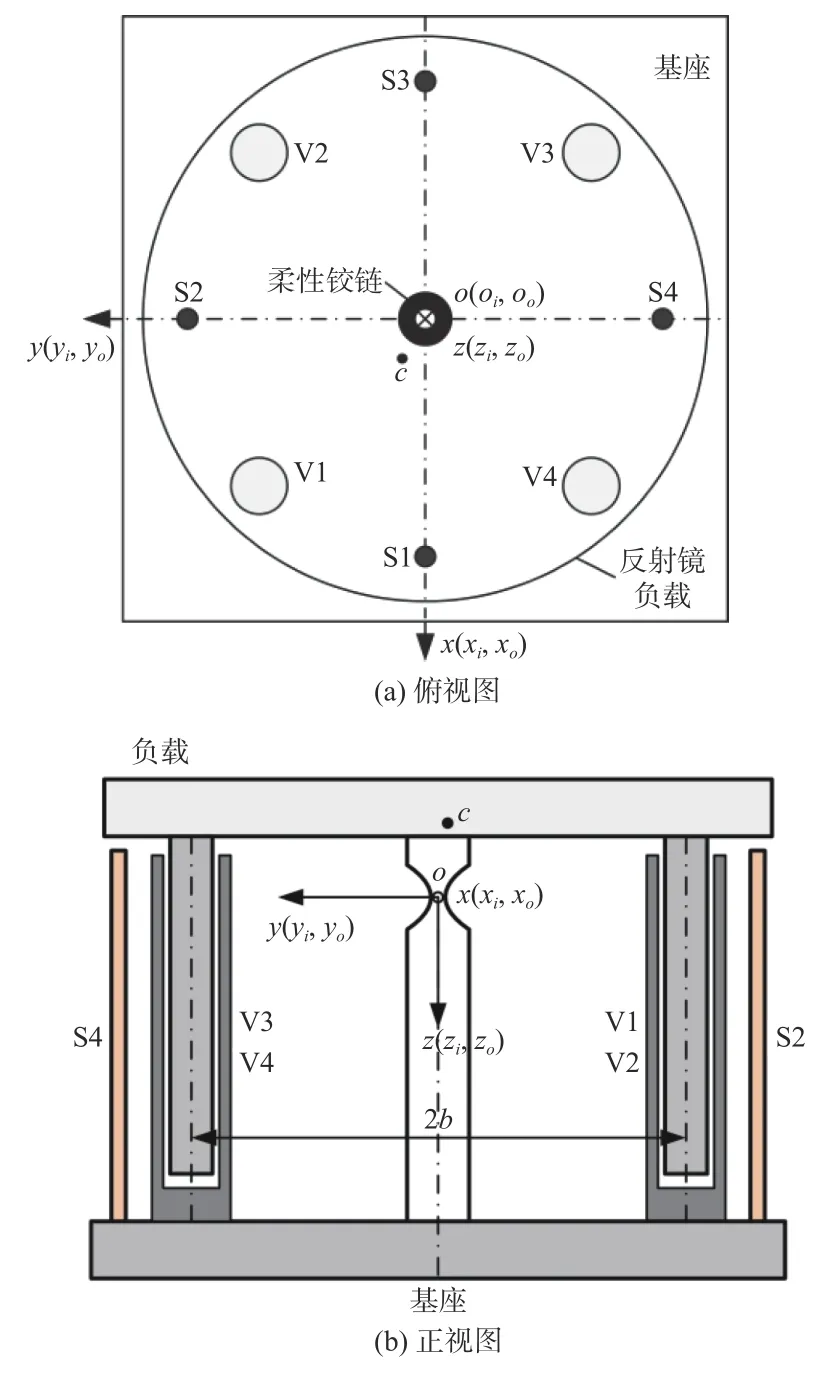
图 3 两轴FSM 简化模型Fig.3 Simplified model of two-axis FSM
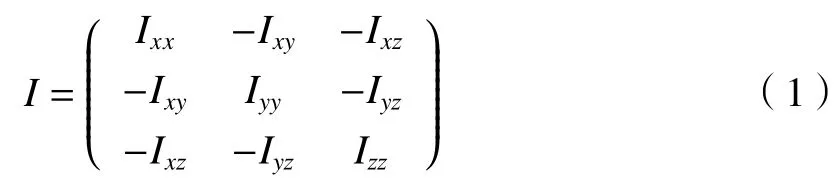
假设反射镜负载质量为m,由于加工误差、装配误差等,其质心c往往偏离柔性铰链旋转中心o。设反射镜负载质心c偏离转动中心o的位移为(Δx,Δy,Δz)T,则反射镜负载在o-xyz坐标系下的惯性张量为
在振动情况下,设基座坐标系oi-xiyizi相对惯性坐标系o-xyz的平动位移为(xi,yi,zi)T,则转动角位移为(αi,βi,γi)T;设反射镜负载坐标系oo-xoyozo相对惯性坐标系o-xyz的平动位移为(xo,yo,zo)T,则转动角位移为(αo,βo,γo)T。
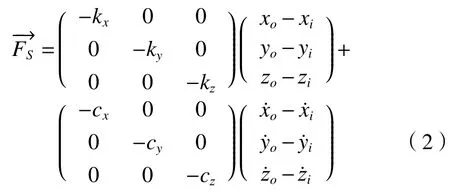
由于反射镜负载坐标系oo-xoyozo相对基座坐标系oi-xiyizi平动,则引起柔性铰链产生的弹性力为
由于反射镜负载质心偏离转动中心,则引起的绕柔性铰链转动中心的不平衡力矩为

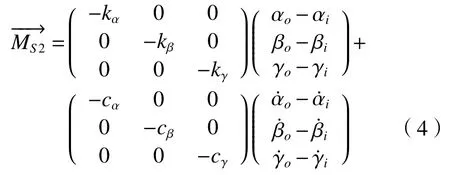
由于反射镜负载坐标系oo-xoyozo相对基座坐标系oi-xiyizi转动,则引起柔性铰链产生的弹性力矩为
音圈电机施加到反射镜负载平台上的力、力矩分别为
式中:FV1、FV2、FV3、FV4为音圈电机在z轴方向产生的驱动力。
反射镜负载坐标系oo-xoyozo相对惯性坐标系o-xyz的平动为(xo,yo,zo)T,根据牛顿第二定律可得:

反射镜负载坐标系oo-xoyozo相对惯性坐标系o-xyz的转动为(αo,βo,γo)T,根据定点转动的欧拉动力学方程可得:

将(1)式~(6)式代入(7)式和(8)式中,整理后可得反射镜负载的运动微分方程为

式中,Xo为反射镜负载位移量,即:

Xi为基座位移量,即:

M称为质量矩阵,即:
C为阻尼矩阵,即:
K为刚度矩阵,即:
D为运动耦合矩阵,即:
V为音圈电机力矩矩阵,即:
当惯性积Ixy=Ixz=Iyz=0,Δx=Δy=Δz=0时,质量矩阵M、阻尼矩阵C、刚度矩阵K为对角矩阵,此时运动微分方程解耦。
定义FSM 柔性铰链沿3 个轴的平动谐振频率为
定义FSM 柔性铰链绕3 个轴的转动谐振频率为
2.2 FSM 驱动元件模型
以音圈电机作为驱动元件为例,设其电阻为Rv,电感为Lv,反电动势系数为Ke,电机力矩系数为Kt,音圈电机控制电压为uk,则音圈电机的数学模型可表示为

式中,k=1,2,3,4。
FSM 为绕x轴转动和绕y轴转动的两轴系统,对应x轴和y轴的控制电压uα、uβ,为实现解耦控制,需要得到转动轴控制电压与音圈电压间的解算关系。
根据(6)式可知,音圈电机输出力Fvk与作用到反射镜负载的力矩关系为
公式(20)中,可根据Mvα、Mvβ求解Fv1、Fv2、Fv3、Fv4,方程组有无穷多组解。根据极小范数可求得一组解,这组解的欧式范数最小,即:
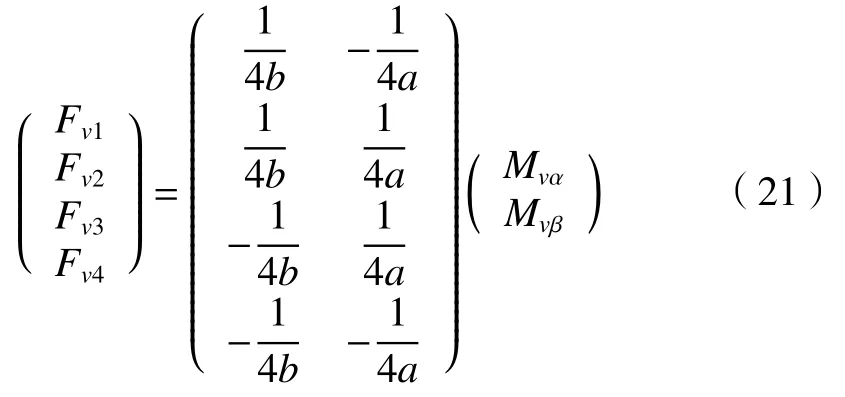
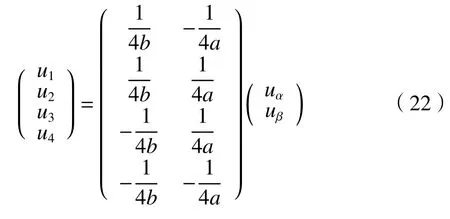
音圈电机输出力Fvk由音圈电机控制电压uk决定,转动轴力矩Mvα、Mvβ与转动轴控制电压uα、uβ对应,因此,根据(21)式可得转动轴控制电压与电机控制电压间的关系为
3 FSM 仿真分析
3.1 FSM 仿真模型
快速反射镜控制框图如图4 所示。根据建立的FSM 运动微分方程、音圈电机模型等,搭建被控对象的 Simulink 仿真模型,如图5 所示。图5 中同时增加了音圈电机驱动器、角度传感器和控制器等仿真模型,实现了包含柔性铰链结构特性的全系统仿真模型。为模拟FSM 基座所受到的振动环境,建立了扰动仿真模型。通过谱密度函数复现时域随机信号的方法,可模拟任意给定振动功率谱密度曲线的随机振动[22],以此作为FSM 基座上的扰动信号。为便于对模型中参数进行修改,编写了FSM 仿真模型参数设置界面,如图6 所示,用于设计反射镜负载参数、柔性铰链结构特性参数、音圈电机参数等。
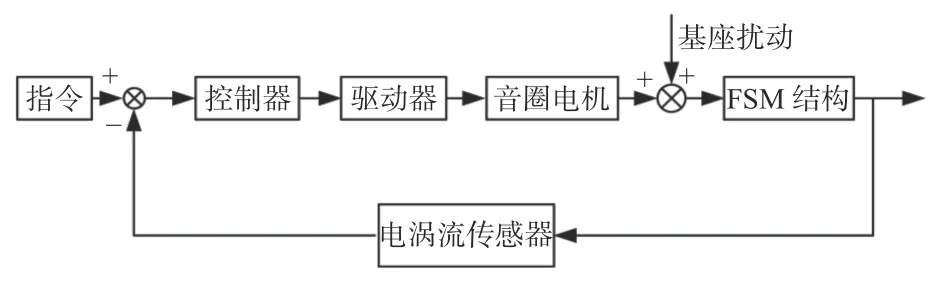
图 4 FSM 控制系统框图Fig.4 Block diagram of FSM control system
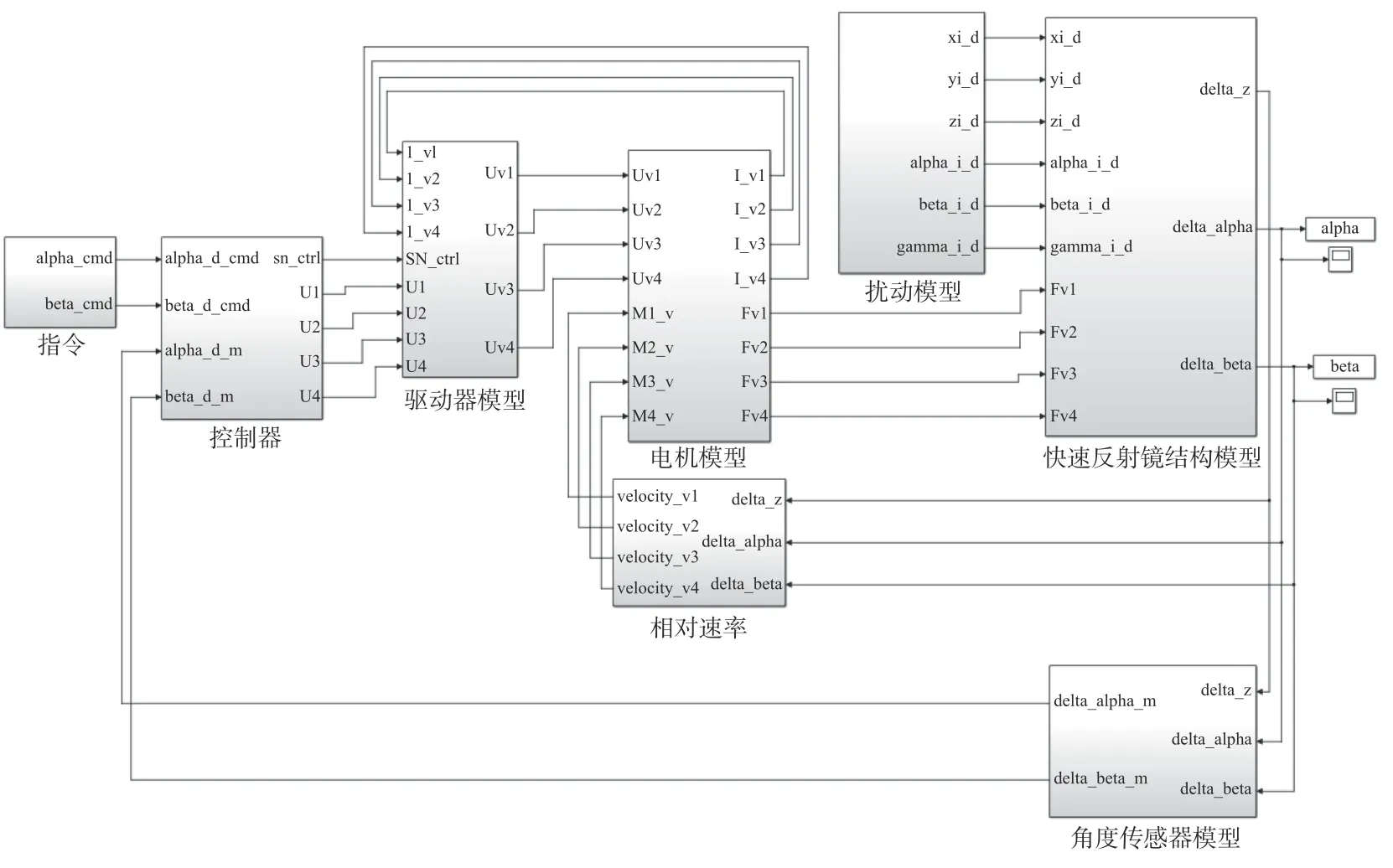
图 5 FSM Simulink 仿真模型Fig.5 Simulink simulation model of FSM
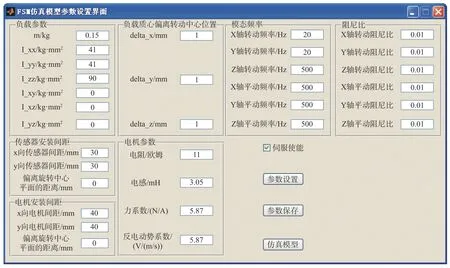
图 6 FSM 仿真模型参数设计界面Fig.6 Parameter setting graphical user interface(GUI)for simulation model of FSM
3.2 FSM 仿真分析
假设FSM 非共工作轴的谐振频率均为500 Hz,绕X轴、Y轴的转动固有频率为20 Hz,采用PID控制,经PID 参数整定后,系统的开环传递函数和闭环传递函数如图7 所示。从图7 可看出,系统增益交界频率为300 Hz,相位裕度为60°;相位交界频率为421 Hz,增益裕量为40.1 dB;系统的闭环带宽(-3 dB)为480 Hz。
伺服使能前后,线振动的隔离曲线如图8 所示。从图8 可看出,伺服系统对300 Hz 以内的扰动进行隔离,但相比伺服不使能的情况,伺服使能后,对300 Hz 以外的扰动隔离能力反而减弱。
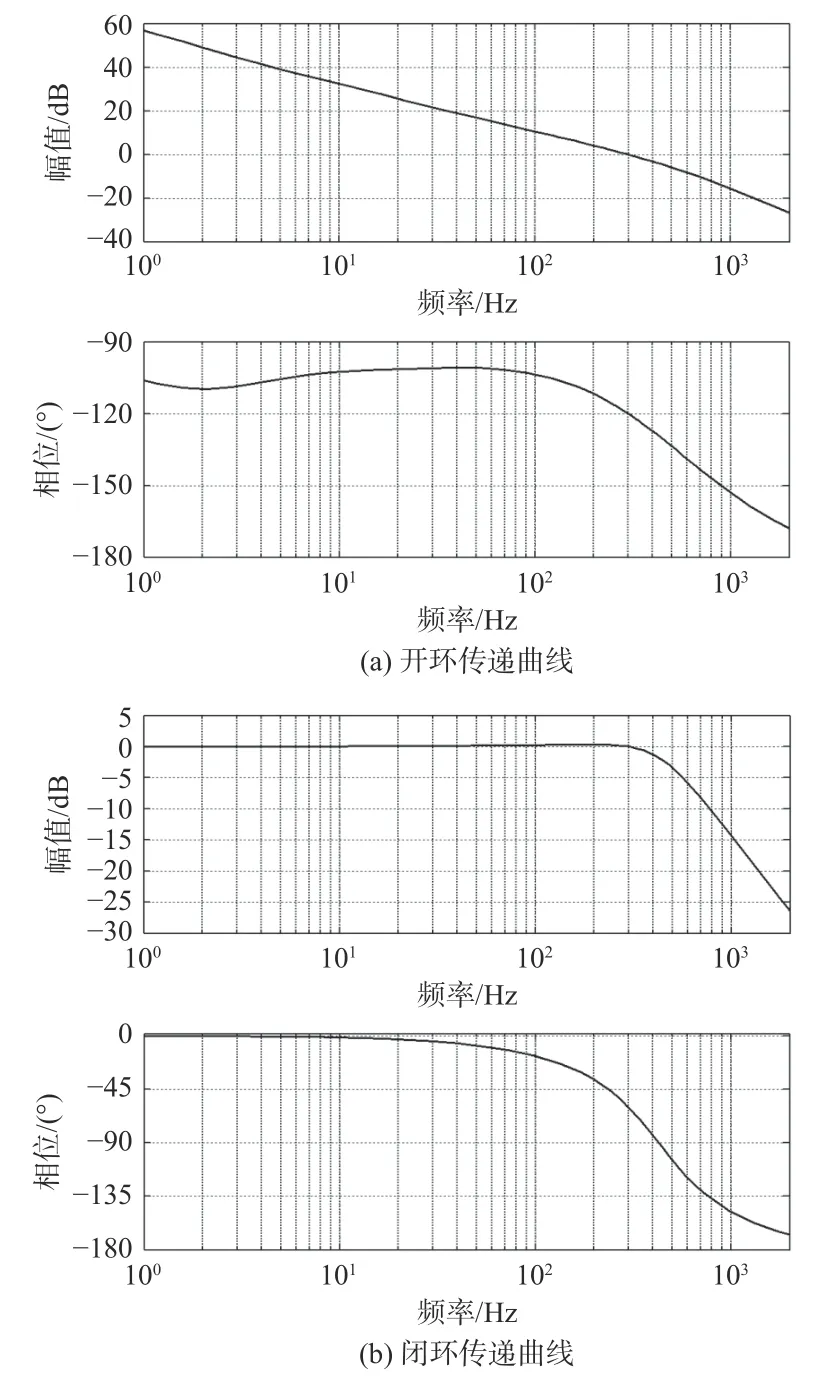
图 7 系统开环与闭环传递函数曲线Fig.7 Transfer function curves of open-loop and closedloop of system
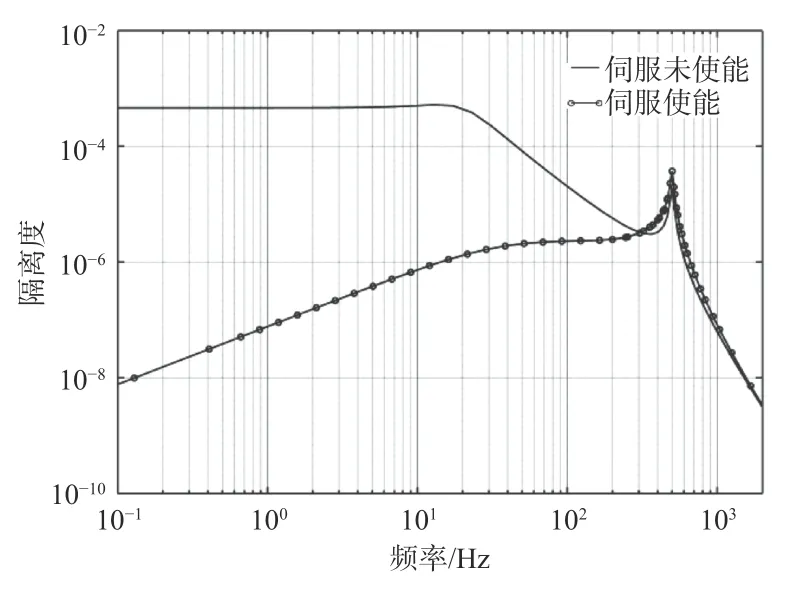
图 8 基座线振动的隔离曲线Fig.8 Rejection curves for linear vibration on foundation support
以给定的加速度功率谱(如图9 所示)为扰动输入,仿真得到伺服使能与未使能状态下的FSM的角位置信号,如图10(a)所示;对角位置信号进行功率谱分析,得到功率谱密度曲线,如图10(b)所示。从图10 可知,在未使能与使能状态下FSM的锁零精度(RMS 值)分别为1 400 μrad、55.32 μrad,且角位置信号功率谱密度曲线在500 Hz 左右存在谐振峰,与定义的非工作轴谐振频率一致。
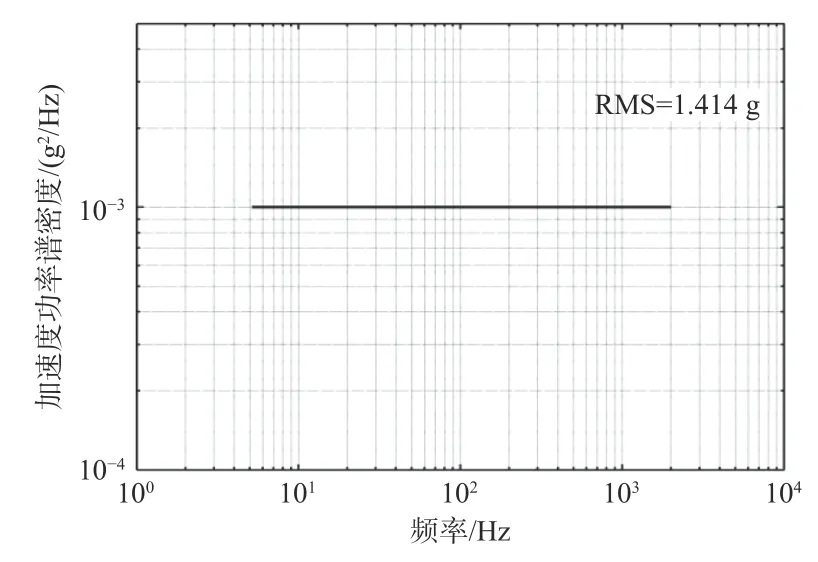
图 9 线加速度功率谱密度Fig.9 Power spectral density of linear acceleration
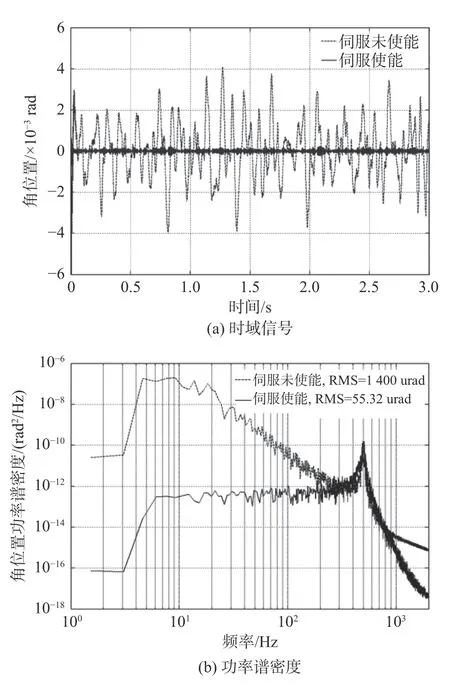
图 10 振动情况下FSM 角位置信号Fig.10 Angular position signal of FSM with vibration
为分析柔性铰链结构特性对FSM 性能的影响,在伺服系统开环增益交界频率为300 Hz、相位裕度设置为60°的情况下,改变结构谐振频率,在相同振动条件下,分析FSM 角位置的均方根值,如表1 所示。仿真结果表明,在转动轴固有频率确定时,增大非工作轴固有频率,同等振动条件下FSM角位置的RMS 值减小。当非工作轴谐振频率大于开环增益交界频率2 倍时,工作轴谐振频率在20 Hz~50 Hz,此振动条件下FSM 锁零精度均较高,且相差不大。但随着转动固有频率的增大,对音圈电机的力系数等要求越高,由于尺寸等限制,音圈电机选定时转动固有频率选择过大,系统被控对象会出现谐振峰,使得控制系统复杂或达不到性能要求。因此,需要权衡各方面的因素,对转动固有频率进行选取。
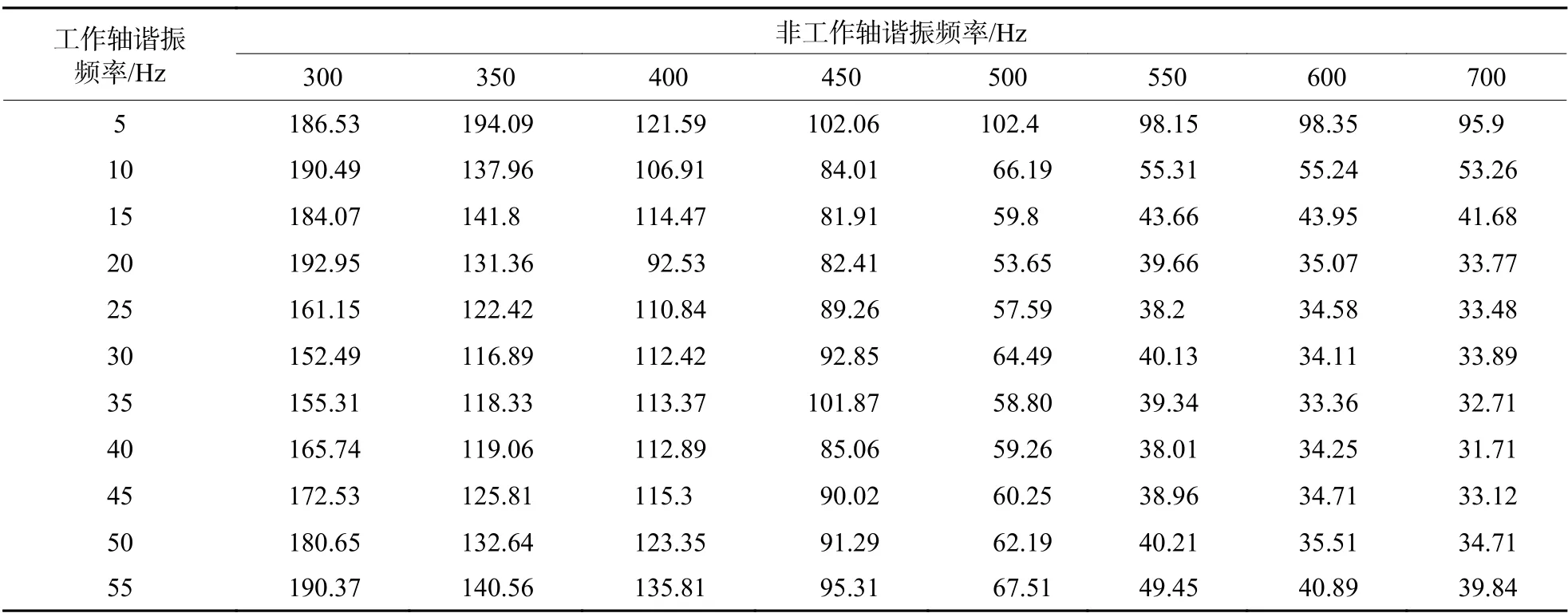
表 1 不同结构特性下FSM 角位置的RMS 值Table 1 RMS of FSM angular position with different structural characteristics
4 实验验证
对FSM 开展实际振动实验。根据模态测试可知,其转动轴固有频率为25 Hz 左右,非工作轴固有频率为515 Hz 左右,伺服开环穿越频率为293 Hz,相位裕度设置为52°。按照图9 所示振动条件进行振动试验,伺服使能前后FSM 的角位置信号如图11(a)所示。对角位置信号进行功率谱分析,得到功率谱密度曲线,如图11(b)所示。从图11 可看出,在511 Hz 附近存在谐振峰,与非工作轴固有频率接近,与仿真分析结果一致,试验验证了仿真模型的正确性。但实际系统还存在其他结构特性,如733 Hz 处的结构谐振,可能为反射镜负载自身的结构特性,建立的理论模型中无法对此进行表征。
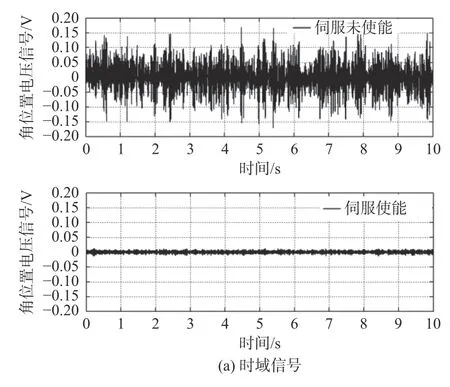
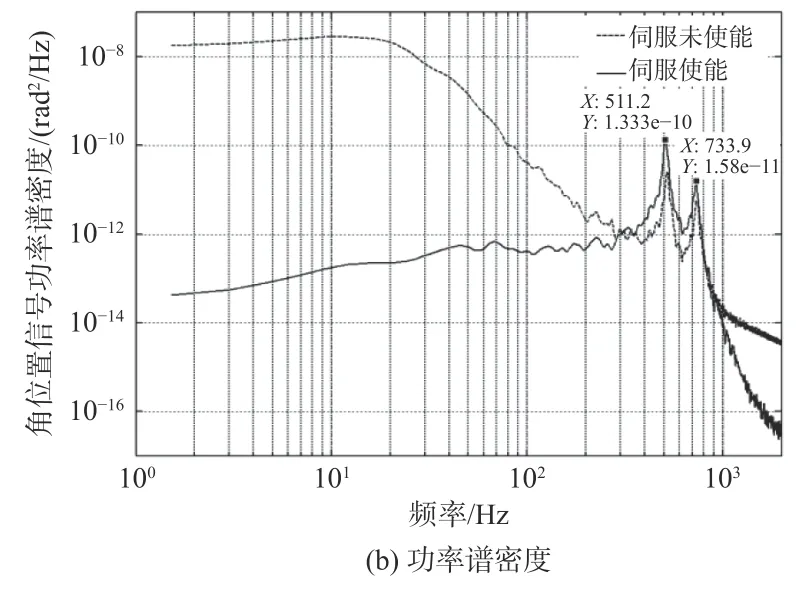
图 11 随机振动试验FSM 角位置信号Fig.11 Angular position signal of FSM under random vibration test
5 结 论
通过分析同等振动条件和伺服控制带宽下,不同结构谐振频率下FSM 角位置的RMS 值,得出以下结论:
1)在转动轴固有频率确定时,增大非工作轴固有频率,FSM 角位置的RMS 值减小;
2)当非工作轴谐振频率为开环增益交界频率2 倍时,工作轴谐振频率在20 Hz~50 Hz,该振动条件下FSM 锁零精度均较高,且相差不大。此时需考虑电机输出力,因为随着转动固有频率的增大,弹性力矩系数会增大,会影响快调反射镜伺服性能的发挥,需要权衡各方面的因素,对转动固有频率进行选取。
最后通过实际随机振动试验,试验结果与仿真分析结果一致,验证了仿真模型的正确性,说明此模型可用于指导FSM 设计。
