基于模型预测控制的永磁同步电机改进自抗扰系统研究*
2022-07-15于中奇杜昭平王伟然
于中奇, 杜昭平, 王伟然
(江苏科技大学 电子信息学院,江苏 镇江 212003)
0 引 言
永磁同步电机(permanent magnet synchronous motor,PMSM)以其效率高、功率大等优点,在航空航天、汽车工业领域、机器人等领域得到广泛应用。然而,PMSM系统是一个强耦合、非线性的多变量系统,对扰动和参数变化十分敏感,常规的比例—积分—微分(proportion-integration-differentiation,PID)控制技术已经难以满足如今高精度系统的控制要求。
近年来,国内外学者将模糊控制[1]、无源控制[2]、模型预测[3]、反步控制[4]等非线性控制算法应用于PMSM控制系统中。自抗扰控制以其抗扰动性能好等特点也受到广泛关注,但也存在需要设置的参数较多且难以整定的不足,如何解决和克服这种不足成为了新的研究热点。文献[5]研究了一种基于改进扩张观测器的自抗扰控制算法,并针对传统自抗扰参数整定繁琐问题给出了一个工程上可行的整定策略,达到了长延时,长控制周期分布式PMSM系统高性能控制,但控制器可调参数较多,且很难整定,其鲁棒性不强。文献[6]提出了一种PMSM线性自抗扰控制设计方法,其中控制器的可调参数采用极点配置法进行参数整定,该方法虽然简单易使用,但是参数整定范围存在局限性。文献[7]提出了一种无参数整定自抗扰控制器(active disturbance rejection controller,ADRC)PMSM控制方法,在系统控制过程中ADRC的参数无需整定,提高系统运行效率,但该控制方法抗扰动能力较差。
为了提高PMSM调速系统的控制性能,提出了一种改进ADRC+模型预测控制(model predictive control,MPC)复合控制策略。首先,针对常规ADRC参数较多且难以整定的问题,引入模糊控制算法,对系统参数进行良好的估计,提高控制器的抗干扰能力。其次,采用MPC设计电流环,减少了定子电流脉动,提高系统控制精度。最后,设计模型参考自适应观测器,估算出转子位置和转速。仿真结果表明:Fuzzy-ADRC+MPC复合控制策略可有效抑制噪声扰动,提高了控制系统的动态响应和抗扰动的鲁棒性。
1 PMSM数学模型
设定电机转子永磁磁场在空间的分布与定子电枢绕组种的感应电动势均为正弦波;忽略定子铁芯饱和,不计磁滞损耗和铁芯涡流的影响。采用id=0方式进行解耦,在d,q轴同步旋转坐标系下数学模型如下[8,9]
(1)
(2)
转子机械运动方程
(3)
电磁转矩方程
(4)
式中ud,uq分别为电压d轴和q轴分量;id,iq分别为电流的d轴和q轴分量;Ld,Lq分别为电机的定子和转子电感;Rs为电机定子电框相电阻;ωr为电机的机械角速度;J为电机转动惯量;p为电机极对数;ψf为转子永磁体产生的磁势;TL为负载转矩;B为摩擦因数。
2 模糊算法ADRC设计
控制器的设计过程主要由3个步骤组成。首先,设计一种基于PMSM的常规ADRC,并将负载转矩作为未知扰动进行估计;然后,将常规ADRC数学模型[10]进行简化,引入模糊算法控制,将模糊算法控制器的输入值和输出值进行模糊处理;最后,根据选取模糊论域以及隶属度函数构成的整定参数模糊表进行去模糊化处理,将解模糊化处理得到的参数修正值补偿非线性误差反馈控制器。
2.1 常规的ADRC的数学模型
表贴式PMSM的交直轴电感相等,即Ld=Lq=Ls,根据式(3)和式(4),可得以下方程
(5)
令f0=-Bωr/J-TL/J;b0=kf/J;u=iq由式(5)可得
(6)
式中 系统的状态变量为x=ωr;系统输出变量为u=iq;已知扰动项为f0为总扰动;输入增益为b0。
为了实现对该系统的速度环干扰进行在线估计,结合ADRC设计原理,设计一阶速度ADRC,ESO过程如下
(7)
式中z1和z2分别为ωr和f0的估计值;β1和β2为ESO的增益。
转速转子误差e如下
(8)

将系统的未知干扰z2补偿,设计的ADRC控制器如下
(9)
以上结合,非线性误差反馈控制率
(10)
常规的ADRC是根据状态观测器的估计值进行实时补偿。通过对β参数进行调节,可以有效提高系统性能。
2.2 模糊ADRC设计
根据实际应用,通过对反馈增益参数β参数整定,不需要对控制器参数进行手动调整,可实现对系统参数的实时整定[11,12]。引入模糊控制算法,实现对反馈增益参数β的参数整定,有效改善系统控制效果。基于模糊算法的ADRC转速控制器结构图如图1。
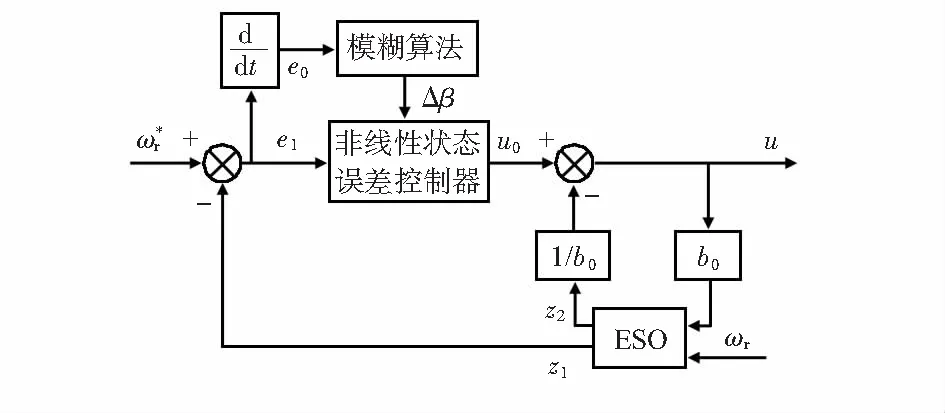
图1 模糊ADRC转速控制器结构
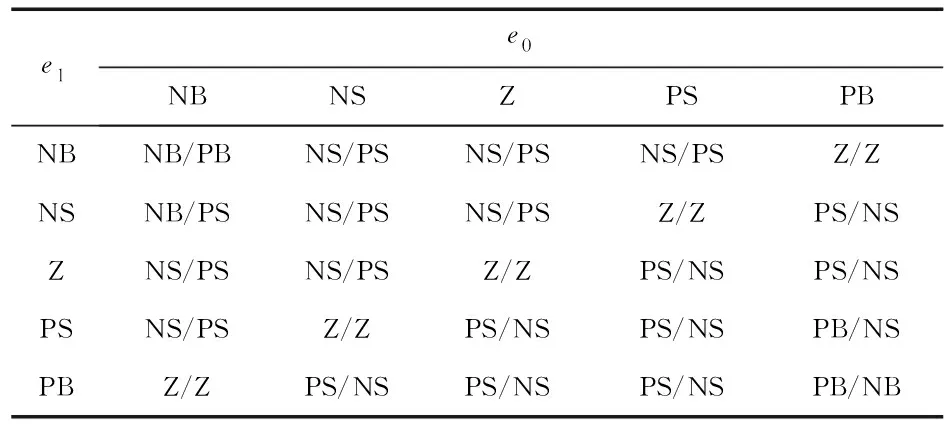
表1 Δβ模糊规则
根据表1模糊规则及模糊控制模块中的解模糊算法可以得到修正值Δβ,代入式(11)
β=β′+Δβ
(11)
式中β′为非线性状态误差反馈的初始值。由式(11)可得ADRC参数自整定,结合式(10)构成模糊ADRC转速控制器。
2.3 模型预测电流控制器设计
根据系统电流控制器设计要求,对系统模型进行离散化处理[14~16],采样周期为Ts=0.1 ms,控制器设计过程主要由选取最小价值函数和确定预测电流模型构成。
参照模型预测为减少PMSM定子电流脉动,对逆变器输出的三相电压控制矢量进行选取,设计的价值函数
Vi∈{V1,V2,V3,V4,V5,V6},i=1,…,6
(12)

(13)
采用一阶欧拉法,对式(1)和式(2)进行离散化处理,电流预测值表达式
(14)
式中id(k+1),iq(k+1)为k+1时刻的预测值;id(k),iq(k),ud(k),uq(k)为k时刻定子电流和电压的d,q轴分量;ωr(k)为k时刻电机机械角速度,Ts为采样周期。
3 模型参考自适应系统观测器设计
模型参考自适应系统(MRAS)观测器从结构上可以分为可调模型、参考模型以及自适应律3个部分。MRAS是将含有未知参数的表达式作为期望模型,而将含有待辨识参数表达式作为可调模型,且两个模型具有相同物理意义的输出量,利用两个模型的输出量之差,通过合适的自适应律来实现对PMSM的参数辨识。
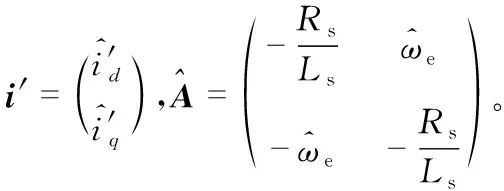
根据式(1)和式(2),确定可调模型
(15)
其中
ωe=pωr

式(15)的状态矩阵A中包含转子速度信息,因此,可将此式子作为可调模型,ωe为待辨识的可调参数,参考模型为PMSM。
将式(15)以估计值表示为
(16)
定义误差e2=i′-′,将式(15)和式(16)相减可得
(17)
其中
设计自适应律是MRAS控制系统设计核心,其功能是在系统受到干扰时更改参数时确保系统输出的稳定性。以各种数学理论为基础,设计MRAS控制系统的自适应律,使系统误差最终为零,本文主要以Popov超稳定理论为基础,进而设置模型参考自适应控制系统的自适应律[17,18],其满足条件如下:
1)传递矩阵H(s)=(sI-Ae)-1为严格正定矩阵;

这时,有lime2(t)=0,也就是说模型参考自适应系统为渐进稳定的。
对Popov积分不等式进行逆向求解可得自适应律,化简后结果为
(18)

将式(18)整理可得
(19)
由上式可得估测速度后在对其进行积分,便可得到电机转子位置角的估计值e。转子位置角计算公式为
(20)
MRAS速度观测器如图2所示。
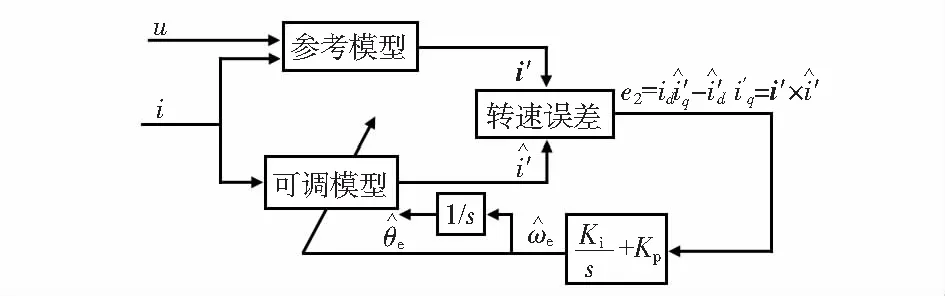
图2 MRAS速度观测器结构
4 仿真与系统结果分析
基于改进的ADRC+MPC的PMSM系统控制框图如图3所示,电机的转速调节采用基于模糊控制的改进ADRC控制,电机的电流调节采用MPC。根据图2的MRAS速度观测器结构和式(19)、式(20),可估算出转子的速度和位置角替代速度传感器对转子速度起到检测作用,将估算出的转子速度输入改进的ADRC速度调节器,而估算出的转子位置角用于坐标变换。
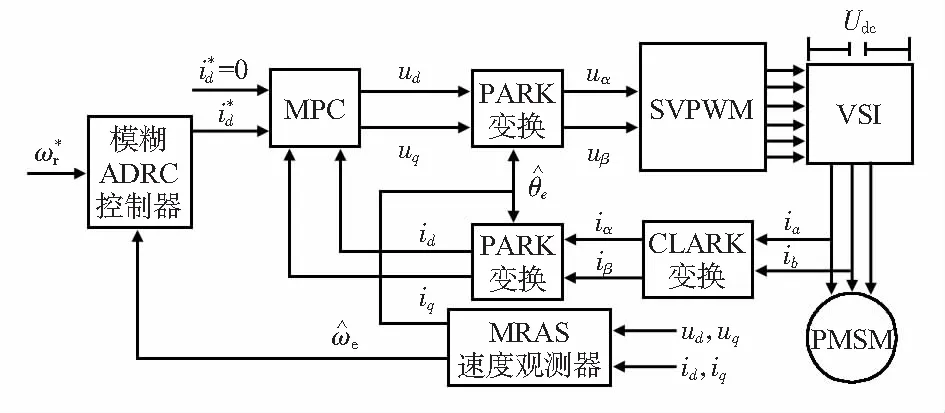
图3 基于改进的ADRC+MPC的PMSM系统控制框图
为了验证改进ADRC方法在PMSM系统的性能,在MATLAB/Simulink环境下进行仿真,并将其与PI调节器和常规ADRC进行对比,更好地验证该控制方法的优势。在仿真实验用的PMSM参数为:额定转速1 500 r/min,转动惯量0.003 kg·m2,极对数4,定子电阻2.875 Ω,d轴电感10.05 mH,q轴电感10.05 mH,磁链0.175 Wb,阻尼系数0.008 N·m·s,采样时间Ts=0.1 ms。
图4为给定转速为1 000 r/min,空载条件下,分别采用PI控制、常规ADRC和改进ADRC三种控制器得到的转速响应曲线。图4曲线表明:在电机调速过程中,采用模糊控制对非线性误差反馈控制器中的参数进行实时整定,使得控制器适应性更强。改进ADRC无超调,响应速度明显优于PI控制和常规ADRC。
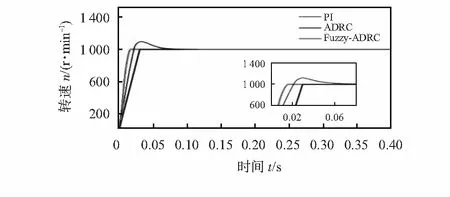
图4 三种控制方法在空载时的速度曲线
图5为当给定转速为1 000 r/min,空载条件下,运行到0.1 s加载2 N·m,在0.2 s时减载2 N·m,分别采用PI控制、常规ADRC和改进ADRC三种控制器得到的转速响应曲线。图5仿真曲线表明:采用PI调节时,系统仍然存在超调,而采用改进的ADRC的系统无超调。相较常规ADRC,改进ADRC的调节时间短,转速跌落较小,可以看出改进ADRC控制器比PI控制和常规ADRC具有更强的抗干扰能力,系统转速受负载变化的影响更小,且恢复时间更短。
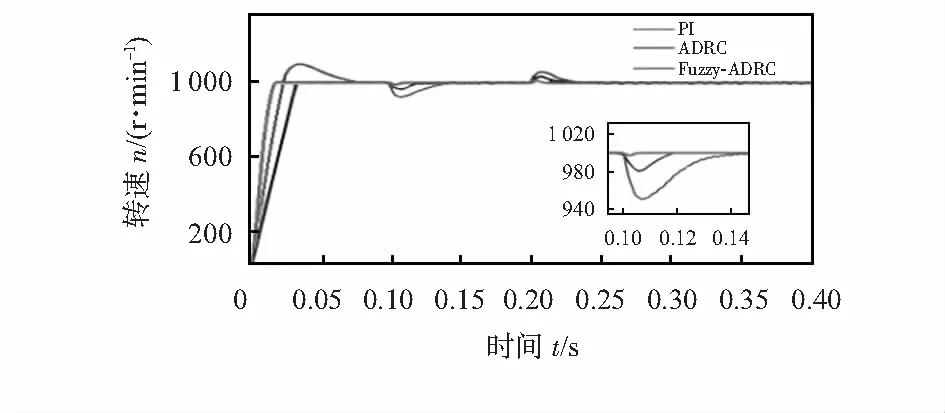
图5 三种控制方法在变载时的速度曲线
在图6中,当负载变化时采用本文设计的电流环MPC控制器的d,q轴电流响应曲线较为稳定,受负载波动的影响小,而采用PI控制的d,q轴电流稳态误差较大,受负载变化影响更加明显,表明采用本文设计的电流环MPC控制器,在满足id=0的矢量控制条件,动态性能较好,证明了所设计的电流环MPC控制器的有效性。
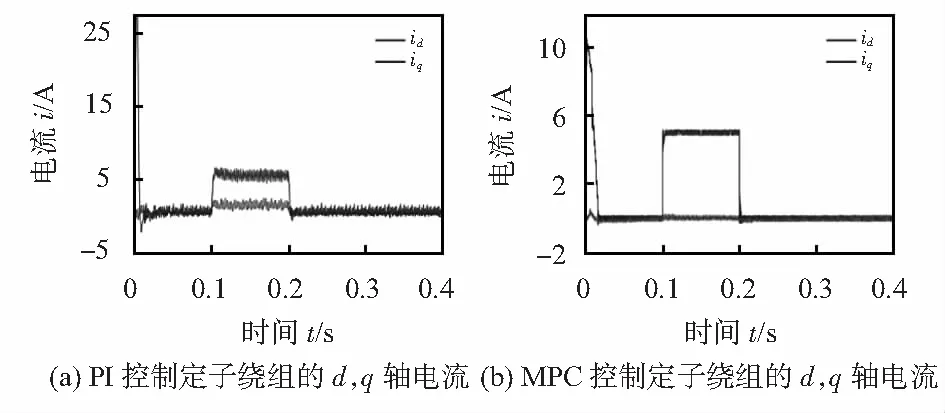
图6 两种控制d,q轴电流响应曲线对比
图7为电机在无负载的启动,电机参考转速设为750 r/min,电机负载转矩在0.1 s突变为1 N·m时的电机转子转速仿真图。图7曲线表明,当电机从零速上升到参考转速时,转矩估计误差在转速上升阶段有较大值,但随着转速上升且稳定运行后转速估计误差逐渐减小,转子位置的估计误差也逐渐减小。
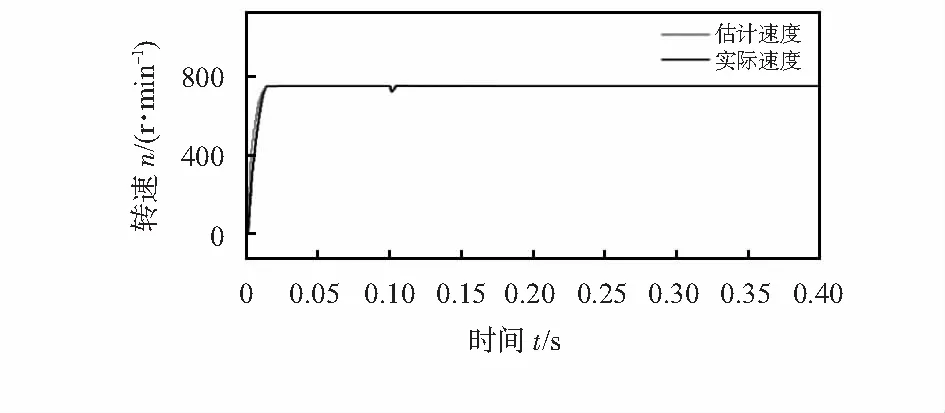
图7 基于MRAS的转速响应曲线
采用改进ADRC的MRAS速度观测器得到的转子实际位置和估计位置的曲线如图8所示。
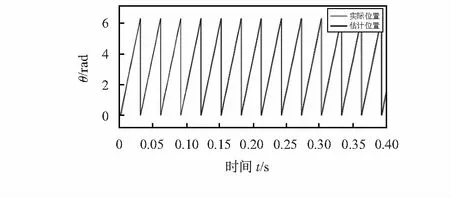
图8 转子位置
图8曲线表明,基于MRAS速度观测器估计的转子位置和电机转子的实际位置比较接近,说明这种观测方法在电机稳态运行时对转子位置的估计是准确的。
5 结 论
本文提出了一种Fuzzy-ADRC+MPC复合控制策略。它被应用于永磁同步电机无速度传感器控制系统中,以抑制噪声扰动和提高控制系统动态响应性能。首先,针对常规自抗扰控制器参数难以整定的问题,引入模糊控制算法整定控制器参数,实现对系统参数良好的估计;其次,采用模型预测控制设计系统电流环,定子电流脉动减少的同时系统控制精度得到提高。最后,采用MRAS观测器估算出转子位置和转速。仿真结果验证了该复合控制方法有效性和优越性。结果表明,改进ADRC+MPC复合控制策略可有效抑制噪声扰动,提高了控制系统的动态响应和抗扰动的鲁棒性。
