基于二阶池化特征融合的孪生网络目标跟踪算法
2022-07-13王鸿帧郑桂妹王国铉宋玉伟
王鸿帧, 郑桂妹, 陈 晨, 邹 帛, 王国铉, 宋玉伟
(空军工程大学防空反导学院,西安,710051)
近年来,反辐射导弹(anti-radiation missile,ARM)、隐身技术的快速发展给雷达的生存造成巨大威胁。米波雷达能够降低吸波材料吸收电磁波的效果且频段较低,隐身战机对其仍有较大的RCS值,所以米波雷达具有反隐身和抗ARM的潜在性能。但米波雷达俯仰维波束较宽,跟踪低仰角目标时存在严重的多径效应[1-2],导致仰角测量精度急剧下降,因此。米波雷达低仰角估计问题成为低空目标探测领域的难点与重点之一。低空目标的仰角小于雷达半波束宽度时,被称为低仰角目标。对于低仰角目标而言,目标直达波信号和地(海)面反射的多径回波信号位于同一波束宽度内,波程差较小,具有强相关性,相当于两个空间临近的相干点源,信息的混叠造成仰角估计性能下降,进而影响目标的检测与定位性能。因此低空目标仰角的估计问题可以等效为两个空间临近相干源的超分辨问题[3-5]。
多径条件下的低仰角估计,可以采用空间平滑[6]、矩阵重构[7-9]等解相干算法进行解相干处理或利用无需解相干的广义MUSIC[10]或最大似然估计[11]算法进行低仰角估计。为了解决米波雷达低仰角测高问题,文献[12]提出一种基于波瓣分裂的低仰角测高方法,其简单实用,利于工程实现,但对阵地环境要求较高。文献[13]提出一种利用回波信号协方差矩阵在各个信号子空间中交替迭代的交替投影最大似然估计算法,完成对目标低仰角的估计。文献[14]对米波雷达测高应用的超分辨算法进行了改进,在减少算法运算量的同时,提高了算法精确度。文献[15]提出了一种改进的加权广义MUSIC算法,该算法在广义MUSIC算法的基础上采用了更加合理的权值,其测角精度得到了一定的提高。文献[16]在地形匹配、干涉式阵列等方面研究了米波雷达低仰角测高技术。针对地形问题,文献[17]在推导匹配复杂阵地扰动多径信号模型的基础上,从复杂阵地条件、地形参数反演和电磁矢量阵列等方面研究了米波雷达低仰角估计算法。文献[18]提出了阵列内插的波束域最大似然测高方法,采用阵列内插的方法在保证大间距线阵波束域变换无模糊性的同时降低了运算量。文献[19]提出了一种基于线性预处理的米波雷达低仰角测高算法,有效地克服了多径效应,通过消除反射系数对低仰角估计的影响实现相干信号的DOA估计。
值得注意的是,上述文献所提算法所采用均匀线阵信号模型存在阵列孔径小和孔径损失问题,因此其在低信噪比条件下的测角精度较低。随着作战实践的不断深入,目标探测需要更高的角度分辨力和测角精度。互质阵列(coprime array, CPA)能够突破奈奎斯特采样定理的限制,提供比均匀线阵更大的阵列孔径,在硬件系统开销一定的情况下,可以获得比均匀线阵更好的测向性能,更符合米波雷达系统实际应用中的需求[20]。为了进一步提高米波雷达角度分辨力,文献[4]提出了一种基于互质阵虚拟阵列的低仰角估计方法,一定程度上提高了米波雷达角度分辨力,但该方法忽略了虚拟阵列中相干信号带来的多余项的影响,造成测角误差较大。为解决上述问题,进一步提高米波雷达测角精度,本文在分析互质阵虚拟阵列法的基础上提出一种基于互质阵物理阵列的米波雷达低仰角估计方法。
1 信号模型
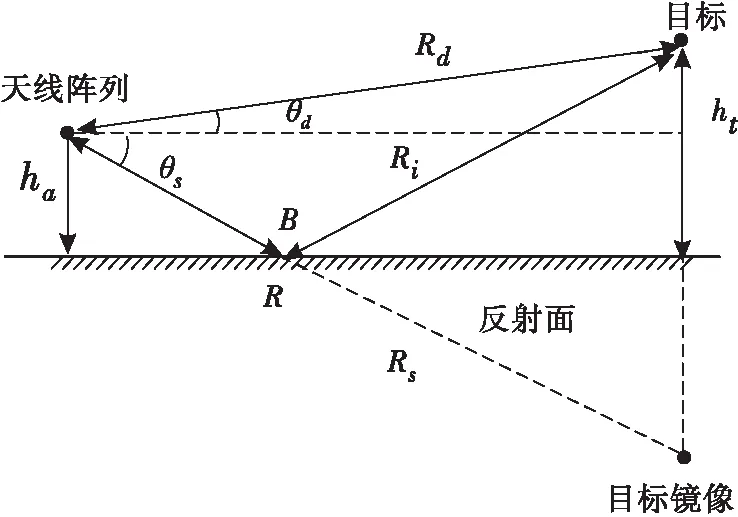
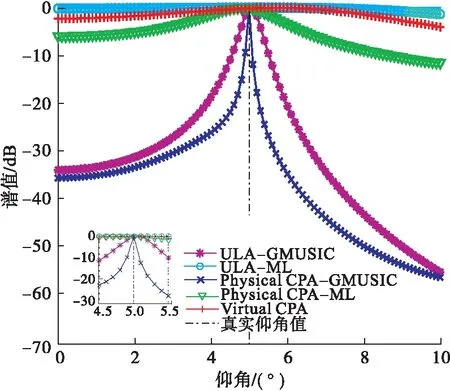
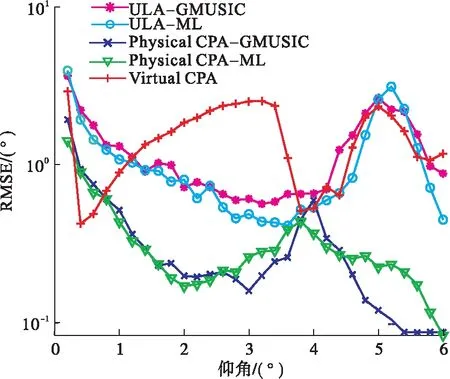
假设一个垂直放置的互质阵列雷达,其采用简单互质阵列作为收发天线,结构见图1。阵列包含2个稀疏均匀子阵,阵元数分别为M和N个,阵元间距分别为Nd和Md,M和N为互质整数,且M 图1 简单互质阵列结构 该米波阵列雷达采用经典镜像多径传播模型,见图2。ha为阵列天线高度,ht为目标高度,B为反射点,R为天线与目标水平投影的距离,Rd为直达波波程(目标斜距),Ri为经地面反射到天线的多径反射距离。θd为目标直达波入射角,θs为反射波入射角。 图2 米波雷达经典镜像多径传播模型 米波雷达对低仰角目标进行探测时存在多径反射现象,即阵列接收到的信号来自4条反射路径:①雷达-目标-雷达;②雷达-目标-反射点-雷达;③雷达-反射点-目标-雷达;④雷达-反射点-目标-反射点-雷达。但常规阵列米波雷达进行低仰角估计时,因距离分辨能力有限,往往将低空目标和镜像目标当作一个距离单元内的目标。因此可以只考虑接收多径,将其看作2条反射路径,即雷达-目标-雷达、雷达-目标-反射点-雷达[5]。则在t时刻第m个阵元接收到的数据可表示为: xm(t)= (e-j2πdsin(θd)/λ+ρe-jαe-j2πdsin(θs)/λ)s(t)+nm(t) (1) 式中:ρ为反射系数,数值一般取-1;s(t)表示信号复包络;nm(t)代表加性高斯白噪声;ΔR=Ri-Rd为波程差,α=2πΔR/λ是反射波与直达波的相位差。可将直达波与反射波波程表示如下: (2) (3) 在实际情况中,R≫ha和R≫ht,将式(2)和式(3)进行二次方展开化简,舍弃掉高次项,可得波程差公式[5]如下: ΔR=Ri-Rd≈ (4) 则将式(4)代入相位差公式可得相位差为α=4πhtha/Rλ。由图2所示几何关系得出直达波入射角θd与反射波入射角θs的关系式[5]如下: (5) 利用式(5)可以将谱峰搜索由二维降为一维。则整个阵列在t时刻接收到的数据可以表示为: X(t)=[x1(t),…,xm(t),…xM(t)]T= AΓs(t)+N(t),t∈(t1,t2,…,tL) (6) a(θd)=[1,…,e-2jπdmsin(θd)/λ,…,e-2jπdMsin(θd)/λ]T (7) a(θs)=[1,…,e-2jπdmsin(θs)/λ,…,e-2jπdMsin(θs)/λ]T (8) A=[a(θd),a(θs)]为信号复合导向矢量。 互质阵直达波与反射波的导向矢量分别由稀疏均匀线阵1和稀疏均匀线阵2的直达波与反射波的导向矢量构成。 一个阵元数为M,阵元间距Md的稀疏均匀线阵,其直达波与反射波的导向矢量a1(θd),a1(θs)为: a1(θd)=[1,e-2jπNdsin(θd)/λ,…,e-2jπ(M-1)Nd sin(θd)/λ]T (9) a1(θs)=[1,e-2jπNdsin(θs)/λ,…,e-2jπ(M-1)Nd sin(θs)/λ]T (10) 一个阵元数为N,阵元间距Md的稀疏均匀线阵,其直达波与反射波的导向矢量a2(θd),a2(θs)为: a2(θd)=[1,e-2jπMdsin(θd)/λ,…,e-2jπ(N-1)Mdsin(θd)/λ]T (11) a2(θs)=[1,e-2jπMdsin(θs)/λ,…,e-2jπ(N-1)Mdsin(θs)/λ]T (12) 则互质阵直达波与反射波的导向矢量为: aCPA(θd)=C[a1(θd)Ta2(θd)(2:N,:)T]T (13) aCPA(θs)=C[a1(θs)Ta2(θs)(2:N,:)T]T (14) 其中C为校验矩阵,它由2个子阵物理阵元在整个互质阵中的位置所决定。举例来说,7根天线阵子(M=3,N=5)的互质阵的校验矩阵如下: (15) 然后根据式(6)、式(13)和式(14)计算信号协方差矩阵如下: (16) 文献[4]提出了一种基于互质阵虚拟阵列的低仰角估计方法,下面简要阐述该方法。 虚拟阵列是将稀疏阵列接收到的入射信号的协方差矩阵RXX向量化后的一种数学表征。根据文献[4],协方差矩阵RXX中的第i行第j列元素为: (17) (18) (19) 式中:di,dj(i,j=1,2,…,M)为物理阵元位置,di-dj为虚拟阵元位置。把RXX矢量化操作后得到一个新的矢量,即虚拟阵列接收信号,公式如下: z=vec(RXX) (20) 取对应于虚拟阵元位置的二阶统计量筛选重排去冗余后作为虚拟均匀线阵的等价接收信号Z。Z中每个位置的接收信号可看成rij_ULA项和Δrij项之和,这样得到矢量ZULA和ΔZ,ZULA是虚拟均匀线阵的等效接收信号,ΔZ是相干信号引起的多余项。则Z表示成: Z=ZULA+ΔZ (21) 由式(18)和式(19)rij_ULA和rij的表达式可知,ZULA和ΔZ的相关系数主要与仰角相关,且随仰角变化呈准周期性变化,经实验仿真发现在0°~8°时其绝对值都控制在0~0.6之间,基于此认为rij_ULA和ΔZ在低仰角0°~8°的环境内是弱相关的,则相干信号引起的多余项ΔZ可当成虚拟阵列接收的噪声项,接收信号Z可以近似作为虚拟均匀线阵的等效接收信号[4]。 易知Z为单秩的二阶统计量,相当于一个单采样快拍虚拟信号,无法直接用Z作为虚拟阵列协方差矩阵。文献[4]采用空间平滑的方法恢复协方差矩阵的秩,之后用MUSIC算法估计目标低仰角。该方法可参考文献[4],这里不再赘述。 常规阵列雷达中直达波与反射波的关系可以等同于相干信号。由于互质阵阵列间距不等,故适用于均匀线阵的空间平滑和矩阵重构等解相干算法不适用互质阵模型。基于此本文对接收数据进行实值处理后利用无需解相干的广义MUSIC[10]或最大似然估计算法[11]得到精确低仰角。下面介绍基于互质阵物理阵列的的实值低仰角估计方法。 式(6)为P×L维阵列接收信号矩阵,其中对于简单互质阵列,P=M+N-1,不难发现其协方差矩阵式(16)为复数矩阵,为进一步减少计算复杂度,可利用酉矩阵对接收数据进行实值处理。定义酉矩阵为: (23) (24) 式中:ΠK为K×K的交换矩阵,其反对角线上元素为1,其他元素为0,IK为K×K的单位阵。若P为奇数,采用式(23)进行实值处理,且K=(P-1)/2;若P为偶数,采用式(24)进行实值处理,且K=P/2。 根据酉矩阵性质,酉矩阵可通过酉变换将Centro-Hermitian矩阵变为实矩阵,但RXX不是Centro-Hermitian矩阵,因此需对其进行一次双向平滑使其转换为Centro-Hermitian矩阵[21]: (25) 然后对其进行酉变换即可得到实矩阵: (26) 同理,对复合导向矢量也可进行酉变换得到实值复合导向矢量: AU= [UHaCPA(θd),UHaCPA(θs)] (27) 实值处理后即可利用最大似然估计算法或广义MUSIC算法进行低仰角精估计,实值广义MUSIC谱峰搜索公式如下: (28) 式中:Un为RU特征分解得到的实噪声子空间,定义实值空间投影矩阵为: (29) 则实值最大似然估计谱峰搜索公式如下: (30) 式中:trace为求迹运算符。经谱峰搜索获得目标低仰角后,即可根据目标斜距Rd和仰角估计值,计算目标高度为: ht≈Rdsinθd+hα (31) 总结基于互质阵物理阵列的低仰角估计方法步骤如下: 步骤1利用式(6)计算接收信号数据并根据式(16)计算数据协方差矩阵; 步骤2利用酉矩阵对接收到的多快拍数据协方差矩阵和复合导向矢量进行实值处理; 步骤3利用广义MUSIC或最大似然算法进行谱峰搜索,获得目标低仰角估计值; 步骤4利用式(31)将目标低仰角数据转换为目标高度数据。 各仿真实验基础条件一致:假设2个垂直放置的米波阵列雷达,天线阵元成一维线性排布,其接收天线1为均匀线阵,其接收天线2为简单互质阵。均匀线阵阵元数目P=7,阵元间距d为信号波长λ的二分之一;简单互质阵两个子阵阵元数目分别为M=3和N=5,阵元间距分别为Nd和Md;雷达工作频率为300 MHz,天线高度为4 m,地面反射系数为-0.98,空间目标数量n=1,添加噪声为高斯白噪声。本文采取蒙特卡洛重复实验对比不同阵列不同算法的测角精度,蒙特卡洛重复实验次数为100次,一维均方根误差RMSE公式为: (32) 此组实验条件为目标直达波入射角为5°,SNR=10 dB,快拍数L=100,目标距离为300 km,角度搜索范围为0°~10°,搜索间隔为0.1°。互质阵分别利用物理阵列和虚拟阵列估计低仰角并与均匀线阵进行对比,经Matlab仿真得空间谱见图3。 图3 低仰角估计空间谱图 仿真结果表明:①各阵列采用实值广义MUSIC和最大似然算法均能准确测量目标仰角,且实值广义MUSIC算法谱峰更尖锐,效果更佳;②采用同种算法的互质阵低仰角谱峰比均匀线阵更尖锐,测角性能更佳;③受虚拟阵列近似模型和解相干算法的影响,互质阵虚拟阵列法只能近似估计目标低仰角,且估计值没有均匀线阵准;即在同等条件下,互质阵物理阵列法比虚拟阵列法低仰角估计效果好。 实验前,先仿真目标仰角随距离变化曲线。假设一批目标飞行高度分别为1 000 m、2 000 m、3 000 m,从距离雷达阵地300 km飞行至30 km,仰角随目标距离变化曲线如图4所示。从图中发现,在实际作战过程中,目标仰角比较低,高度1 000 m时仰角变化区间0.2°~2°,高度2 000 m时仰角变化区间0.4°~3.8°,高度3 000 m时仰角变化区间0.6°~5.8°,因此实验2选取仰角角度为0.2°~6°。 图4 仰角随目标距离变化曲线 其它实验条件为目标距离为200 km,SNR=0 dB,快拍数L=100,仰角取值间隔为0.2°,角度搜索范围为0°~6°,搜索间隔为0.01°。仿真测试不同仰角下,仰角估计值相对于真实角度的蒙特卡洛重复实验误差。经Matlab仿真实验绘制仰角角度和均方根误差关系图见图5。 图5 仰角角度对测角精度的影响 仿真结果表明:①仰角与不同阵列不同算法的测角误差大致呈负相关关系,但部分角度区间存在起伏。主要原因是仰角变化导致直达波和反射波波程差变化,进而造成多径衰减系数相位的周期性变化,影响算法效果。随着仰角变大,直达波和反射波的间隔变大,算法效果受多径效应影响逐渐变小,角度估计性能整体呈上升趋势;②无论使用均匀线阵还是互质阵作为雷达接收天线,实值最大似然算法测角精度与广义MUSIC算法相近,随着角度变化互有高低;③在同等仰角条件下,互质阵利用物理阵列估计目标低仰角时较均匀线阵和虚拟阵列法测角精度高,个别角度受多径效应影响略有差别,0.6°以下互质阵虚拟阵列法测角精度高于物理阵列的原因是3°以下虚拟阵列法无法分辨直达波和反射波,仰角估计值为0°引起的。 实验条件为目标直达波入射角为4.5°(根据4.2节实验综合选取),目标距离为200 km,快拍数L=100,SNR的取值范围为-10~10 dB,变化间隔为1 dB,角度搜索范围为0°~10°,搜索间隔为0.01°。仿真测试不同信噪比条件下,仰角估计值相对于真实角度的蒙特卡洛重复实验误差,经Matlab仿真实验绘制信噪比与均方根误差关系见图。 图6 信噪比对仰角测角精度的影响 仿真结果表明:①信噪比与不同阵列不同算法的测角精度呈正相关关系,当信噪比达到一定值后测角精度提升趋于缓慢;②在相同信噪比下,同一阵列采用最大似然算法的低仰角测角精度与广义MUSIC算法相近,随着信噪比的变化互有高低;③在相同信噪比下,采用同种算法的互质阵低仰角测角精度比均匀线阵高,互质阵物理阵列法低仰角测角精度比虚拟阵列法高;④当信噪比大于一定值后,互质阵虚拟阵列法低仰角估计的测角精度基本没有变化,在0.8°左右,这是因为互质阵虚拟阵列近似模型中把相干信号引起的多余项ΔZ当成噪声造成的,空间平滑算法并不能消除近似模型中ΔZ带来的不良影响。 实验条件为目标直达波入射角为4.5°(根据4.2节综合选取),目标距离为200 km,SNR=0 dB,快拍数L,取值变化范围为10~100次,变化间隔为10次,角度搜索范围为0°~10°,搜索间隔为0.01°。仿真测试不同快拍数下,仰角估计值相对于真实角度的蒙特卡洛重复实验误差。经Matlab仿真实验绘制快拍数和均方根误差关系见图7。 图7 快拍数对仰角测角精度的影响 仿真结果表明:①快拍数与不同阵列不同算法的测角精度呈正相关关系,当快拍数达到一定值后测角精度提升趋于缓慢;②在相同快拍数下,同一阵列采用最大似然算法的低仰角测角精度与广义MUSIC算法相近,随着快拍数变化互有高低;③在相同快拍数下,采用同种算法的互质阵低仰角测角精度比均匀线阵高,互质阵物理阵列法低仰角测角精度比虚拟阵列法高;④当快拍数大于一定值后,互质阵虚拟阵列法低仰角估计的测角精度基本没有变化,在0.85°左右,这是因为互质阵虚拟阵列近似模型中把相干信号引起的多余项ΔZ当成噪声造成的,空间平滑算法并不能消除近似模型中ΔZ带来的不良影响。 为了提高米波雷达低仰角估计精度,本文研究了基于互质阵的米波雷达测高问题,推导分析了互质阵米波雷达信号模型,并在综合分析互质阵虚拟阵列法的基础上,提出了基于互质阵物理阵列的低仰角估计方法。相较于均匀线阵,互质阵的物理孔径更大,本文所提低仰角估计方法精度得到了较大提升。仿真结果表明互质阵物理阵列法较均匀线阵和虚拟阵列法具有更高的测角精度,在低快拍、低信噪比时效果更佳。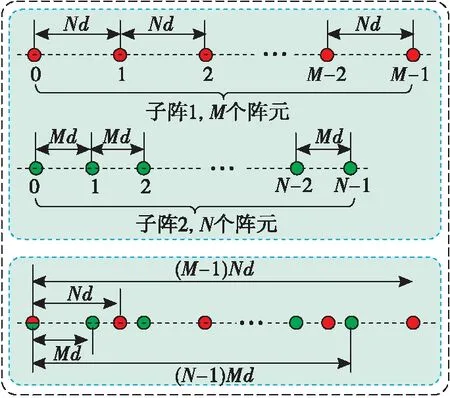


2 基于互质阵虚拟阵列的低仰角估计方法
3 基于互质阵物理阵列的低仰角估计方法
4 仿真实验分析

4.1 空间谱成像对比实验
4.2 仰角影响测角精度实验

4.3 信噪比影响测角精度实验

4.4 快拍数影响测角精度实验

5 结语